Beruflich Dokumente
Kultur Dokumente
Cours JFK
Hochgeladen von
DENOUOriginaltitel
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Cours JFK
Hochgeladen von
DENOUCopyright:
Verfügbare Formate
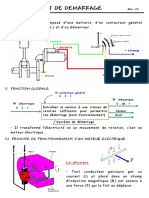
DEMARRAGE MOTEUR
Il est possible de faire démarrer un moteur monophasé avec un enroulement de
démarrage. Mais cet enroulement doit être éliminé dés que le moteur atteint environ 80% de
sa vitesse initiale. Cette opération s’effectue à l’aide d’un relais de démarrage.
A propos du relais de démarrage.
Plusieurs types possibles :
A : Le relais d’intensité ;
B : Le relais de tension ;
C : La résistance CTP.
A : Le relais d’intensité est utilisé sur les petits moteurs monophasés d’une puissance
inférieure à 600W.
Il est généralement embroché directement sur les borniers du compresseur. On trouve, sur le
corps du relais d’intensité, les indications suivantes :
Enroulement principal ------------- Principal / Main -------------------P/M
Enroulement auxiliaire -------------- Auxiliaire / Start -------------------A/S
Phase d’alimentation ----------------- Line ------------------------------------L
TOP
A/S P/M
Le relais d’intensité.
Si on teste ce relais avec un ohmmètre, on mesure l’ entre A/S et P/M ainsi que
entre A/S et L puisque le contact est ouvert au repos.
Par contre, entre P/M et L on trouve une valeur proche de 0 puisque l’on mesure
l’enroulement de la bobine du relais. Cette bobine est constituée d’un fil de grosse section.
Puisqu’il voit passer l’intensité de démarrage.
Si le contact reste en permanence fermé, l ‘enroulement auxiliaire est toujours
alimenté et le moteur risque de « griller ».
Jean François Krasinski I Démarrage moteur mono
C klixon
A P
P/M
A/S L
Schéma de démarrage d’un moteur monophasé à deux enroulements et relais d’intensité.
Dés que le montage est alimenté, un courant traverse la protection thermique,
l’enroulement principal et la bobine du relais d’intensité. Le contact A/S -L est ouvert,
l’enroulement A n’est pas alimenté et le moteur ne tourne pas. L’intensité dans le moteur
augmente (5 fois In) et crée une tension aux bornes de la bobine du relais entre P/M et L.
Cette tension est suffisante pour attirer le contact, l’enroulement A est alors alimenté. Le
moteur se met alors à tourner et au fur et à mesure que sa vitesse augmente, le couple
diminue et l’intensité absorbée diminue. Cette diminution de l’intensité va provoquer
l’ouverture du contact A/S et L. L’enroulement A n’est plus alimenté et le moteur tourne.
Il est possible d’améliorer le couple de démarrage par l’adjonction d’un condensateur
de démarrage placé en série avec l’enroulement A.
Jean François Krasinski II Démarrage moteur mono
C klixon
A P
P/M
A/S L
1 2
Cd
Schéma de démarrage avec condensateur de démarrage.
NB : Si on remplace un relais d’intensité défectueux, il faut impérativement le remplacer par
un relais de même référence.
Une mesure avec la pince ampèremétrique peut nous indiquer la bonne santé d’un
relais d’intensité. L’intensité au démarrage est importante puis elle passe à 0 dés que le
contact du relais s’ouvre.
B : A propos des relais de tension.
Pour les moteurs de plus fortes puissances, l’intensité augmente dans de fortes
proportions, il n’est plus possible d’utiliser des relais d’intensité. Le relais de tension se
caractérise par une bobine formée d’un fil très fin donc très résistant. Le contact est ici fermé
au repos.
Jean François Krasinski III Démarrage moteur mono
6 2
4 1
Modèle d’un relais de tension.
La mesure à l’ohmmètre indique entre les bornes 1 et 2 une valeur de 0 et entre les
bornes 1 et 5 une valeur de quelques milliers d’ohms. L’analyse de la mesure permet de dire
que le contact du relais se trouve entre les bornes 1 et 2.
1 2
Le relais de tension.
Le relais branché entre 1 et 5 le fait fonctionner en « sonnette » c’est à dire que le relais
se colle et se décolle en permanence avec toutes les conséquences pour le moteur associé.
NB : Tout branchement du réseau entre les bornes 1 et 2 du relais entraîne un court circuit.
C klixon
Jean François Krasinski IV Démarrage moteur mono
A 5 P
2 1
Cd
Dés que le montage est alimenté, le courant traverse la protection thermique et
l’enroulement P. Simultanément, l’enroulement A est traversé par le courant ainsi que le
contact 2-1 du relais et le condensateur de démarrage. Le moteur commence à tourner.
La vitesse augmentant, une tension induite prend naissance sur l’enroulement A et
cette tension vient s’ajouter à la tension du réseau.
A la fin du démarrage, la tension induite est maximale et la tension aux bornes de A
peut atteindre 400V (sous 240V). La bobine du relais est spécialement conçue pour rester
collé sous une tension supérieure à la tension d’alimentation (cette valeur est fixée par le
constructeur).
Quand le contact 1-2 s’ouvre, la bobine du relais reste alimenté par la tension induite
dans l’enroulement A.
Pendant le démarrage il est impératif que la bobine soit exactement soumise à la
tension exacte existant sur l’enroulement A.
NB : Le condensateur ne doit pas être raccordé entre 2 et A mais entre 1 et P.
C : A propos du démarrage par CTP.
La résistance à Coefficient de Température Positif voit sa résistance augmenter avec la
température.
Jean François Krasinski V Démarrage moteur mono
C klixon
A P
CTP
A l’arrêt, la CTP est froide.
Les différents modes de démarrage des moteurs
monophasés.
Le montage P S C (Permanent Split Capacitor).
C Klixon
A P
Cp Montage PSC.
C’est un montage simple. Le condensateur Cp reste en permanence sous tension. Sa capacité
reste de faible valeur (< 30 F) et il occupe un volume important. Ce montage est surtout
utilisé sur des petits moteurs entraînant des machines à faible couple résistant
( compresseurs frigorifiques avec détendeur capillaire permettant une égalisation des
pressions, petits ventilateurs équipant des climatiseurs….).
Jean François Krasinski VI Démarrage moteur mono
A la mise sous tension, c’est le condensateur qui donne, par son déphasage, l’impulsion
nécessaire au démarrage du moteur. Pendant la rotation, l’enroulement Auxiliaire reste sous
tension, ce qui a pour effet de limiter l’intensité dans le condensateur.
Le montage C T P ou P T C (Positive Température Coefficient)
C Klixon
A P
CTP
Cp
Montage CTP
Ce montage simple peut être amélioré en raccordant un condensateur Cp placé en parallèle
sur la CTP.
A la mise sous tension, la valeur de la CTP étant très faible (attention à laisser le temps à la
CTP de refroidir, environ 5 min entre chaque démarrage). , le condensateur Cp est court
circuité et il ne peut aider au démarrage. Cela a pour conséquence d’avoir des machines à
faible couple résistant.
A la fin du démarrage, la valeur de la CTP est très importante. Néanmoins l’enroulement
auxiliaire reste sous tension en série avec le condensateur Cp, améliorant ainsi le couple du
moteur en fonctionnement.
Le montage R S I R (Resistor Start Induction Run).
On utilise ici simplement un relais de démarrage.
C Klixon
Jean François Krasinski VII Démarrage moteur mono
U
A P
P/R
A/S L
Montage RSIR avec relais d’intensité.
C Klixon
5
A P
2 1
Montage RSIR avec relais de tension.
Le couple des machines entraînées doit être faible comme sur un petit réfrigérateur.
Le montage C S I R (Capacitor Start Induction Run).
Il s’agit en fait d’un montage RSIR sur lequel on rajoute un condensateur de démarrage. Ce
condensateur va améliorer le couple de démarrage. Le moteur ainsi alimenté va pouvoir
faire tourner des machines ayant un couple résistant plus important comme un circuit
frigorifique à détendeur thermostatique.
C Klixon
Jean François Krasinski VIII Démarrage moteur mono
U
A P
P/R
Cd
Montage C S I R avec relais d’intensité.
C Klixon
5
A P
2 1
Montage C S I R avec relais de tension.
Le montage C S R (Capacitor Start and Run).
Il s’agit en fait d’un montage CSIR sur lequel est ajouté un condensateur de marche Cm.
C Klixon
Jean François Krasinski IX Démarrage moteur mono
A P
P/R
A/S
Cd
Cm
Montage CSR avec relais d’intensité.
C Klixon
5
A P
2 1
Montage CSR avec relais de tension.
Ce montage permet d’obtenir et un couple de démarrage et un couple en fonctionnement
très important. Au démarrage, les condensateurs Cd et Cm se trouvent mis en parallèle et
forment ainsi un condensateur de plus grande capacité.
Une fois terminé le démarrage, Cd est éliminé par le relais, mais l ‘enroulement auxiliaire
continue à être alimenté via le condensateur de marche Cm.
Le condensateur de marche permet également d’améliorer le cos du moteur ayant comme
effet de réduire l’intensité absorbée par le moteur.
Jean François Krasinski X Démarrage moteur mono
Cas des moteurs monophasés à plusieurs vitesses.
C Klixon
GV
Arrêt
PV
A P
Cp
Montage d’un moteur à plusieurs vitesses.
Le principe est de créer une chute de tension par l’adjonction d’un élément impédant en série
avec le moteur.qui doit être du type PSC.
Quand le commutateur est sur la position PV, l’intensité absorbée traverse l’élément
impédant qui créé une chute de tension aux bornes du moteur, il tourne à petite vitesse (PV).
Quand le commutateur est en position GV, l’élément impédant est court-circuité et le moteur
est soumis à la tension totale du réseau, il tourne à grande vitesse (GV).
A propos des condensateurs.
On appelle condensateur l’ensemble formé de deux conducteurs métalliques séparés
par un isolant. Les conducteurs se nomment armatures et l’isolant est appelé diélectrique .
(fig.1)
Armature
Diélectrique
Armature
(fig.1) Constitution d’un condensateur plan.
Jean François Krasinski XI Démarrage moteur mono
(fig.2) Symbole général d’un condensateur
On appelle capacité (C) d’un condensateur, le rapport constant :
C=Q/U avec C en Farad, Q en Coulomb et U en Volt.
Le Farad représente la capacité d’un condensateur qui se charge de un coulomb sous
une tension de un volt.
Les condensateurs usuels ont des valeurs comprises entre quelques picofarads et
quelques milliers de microfarads.
1 picofarad = 1 pF = 10-12 F
1 nanofarad = 1 nF = 10-9 F
1 microfarad = 1F = 10-6 F
Un condensateur plan a une capacité :
Proportionnelle à la surface S de ses armatures ;
Inversement proportionnelle à l’épaisseur e du diélectrique ;
C = 0 x S / e
0 est appelé constante électrostatique. Sa valeur est 1 / 109 x 36 = 8,84 x 10-12 F/m
La présence d’un isolant multiplie la capacité du condensateur :
C = r x 0 x S/e
Le marquage des condensateurs se fait :
Pour les « petits » condensateurs on utilise le code des couleurs et l’unité de
marquage est le picofarad ;
Pour les « gros » condensateurs, les indications de la capacité, de la tension maximale
d’utilisation se fait en clair.
Les condensateurs placés en série (fig.3) ont pour capacité équivalente :
1/Ceq = 1/C1 + 1/C2 + 1/Cn
C1 C2 Cn
Fig.3 : condensateurs en série.
Jean François Krasinski XII Démarrage moteur mono
Dans un montage en parallèle, les capacités s’additionnent. (fig.4)
Ceq = C1 + C2 + Cn
C1
C2
Cn
Fig.4 : condensateurs placés en parallèle.
NB : Un condensateur pouvant restituer l’énergie qu’il a préalablement emmagasinée, tout
condensateur doit être soigneusement déchargé avant toute manipulation afin d’écarter tout
risques de brûlures voire d’électrocution.
L’énergie emmagasinée dans un condensateur est :
W = 1/2 de C U2
Avec W en Joule, C en Farad et U en volt.
La charge et la décharge d’un condensateur dépend de la résistance R associée dans
le circuit de charge et de la capacité du condensateur.
La constante de temps (tau :) est :
=RxC
avec en seconde, R en ohm et C en Farad.
La durée de la charge d’un condensateur est égale à 4,6 fois la constante de temps
pour atteindre 99% de la tension d’alimentation.
A propos des condensateurs et des moteurs monophasés.
Pour démarrer ce type de moteur, il convient de créer une seconde phase. On utilise
un condensateur placé en série avec l’enroulement auxiliaire du moteur. Il est à noter que le
couple de démarrage doit être supérieur au couple résistant. Un condensateur mal choisi
aura pour conséquence de créer un mauvais déphasage ayant pour conséquence de faire
caler le moteur.
Dans les installations on peut trouver deux types de condensateurs :
Jean François Krasinski XIII Démarrage moteur mono
Les condensateurs de marche présentant une faible capacité (pas plus de 30
F). Ils sont conçus pour rester en permanence sous tension.
Les condensateurs de démarrage de technologie « électrolytique » présentent
une forte capacité (jusqu’à plus de 100 F). Ces condensateurs ne doivent pas rester sous
tension car ils s’échauffent très rapidement. (pas plus de 5 secondes en moyenne).
A propos de la mesure d’un condensateur.
Quand on mesure un condensateur avec un ohmmètre, l’appareil se comporte comme
un générateur. Les armatures du condensateur étant normalement déchargées, la tension Uc
est nulle, mais à la connection de l’ohmmètre (placé sur le calibre k minimum), le
condensateur se comporte comme un court circuit et l’aiguille du testeur dévie vers 0. Un
fort courant traverse le condensateur.
Puis l’aiguille du testeur revient lentement vers l’ . Le courant dans le condensateur
diminue mais la tension Uc augmente.
L’aiguille continue jusqu’à l’indication , le courant dans le condensateur est nul et
la tension Uc est alors égale à la tension délivrée par l’ohmmètre.
NB : Un condensateur branché sur le réseau EDF conserve cette tension même lorsqu’il est
débranfché. ATTENTION DANGER.
Il est donc impératif avant toute intervention sur un condensateur de s’assurer qu’il est
complètement déchargé en court circuitant les deux bornes du condensateur avec un
tournevis isolé ( attention à l’étincelle parfois violente due à la décharge).
Certains condensateurs sont équipés d’une résistance de décharge placée entre les
deux bornes du condensateur. Sa valeur d’environ une dizaine de kilo ohms permet une
décharge automatique sans pour autant influer sur le fonctionnement général de la machine.
Notez que cette décharge peut néanmoins prendre plusieurs minutes alors attention !
A propos de la vérification des condensateurs.
Cas d’un condensateur coupé : la mesure avec un ohmmètre placé sur le plus fort
calibre donne l’. Un tel défaut empêche le moteur de démarrer et les sécurités associées
vont se déclencher.
Cas d’un condensateur en court circuit : l’ohmmètre indique ici une valeur proche de
0. Le calibre choisi pour la mesure est le plus petit. Les sécurités thermiques associées au
moteur vont fonctionner.
Cas d’un condensateur mis à la masse : une des armatures peut être à la masse et
provoquer un courant de fuite. C’est le disjoncteur différentiel qui déclenche dans ce cas.
L’ohmmètre , placé sur un fort calibre, doit indiquer une valeur supérieure à 1000 M.
NB : sous une tension alternative de 240V, le courant d’appel du condensateur est environ 14
fois plus petit que la capacité réelle du condensateur. Rappelons que la valeur inscrite sur le
corps du condensateur est donnée avec une tolérance d’environ 10%.
Jean François Krasinski XIV Démarrage moteur mono
Il est possible, avec l’aide de la pince ampèremétrique, de mesurer le courant d’appel en
prenant soin que le temps de la manipulation ne dépasse pas 5 secondes.
L’installation de mesure se fera à travers une protection différentielle.
N L
In 30mA
Choix du matériel.
Les différentes manières d'alimenter un moteur triphasé :
Avec un interrupteur tripolaire ou un commutateur à cames.
Jean François Krasinski XV Démarrage moteur mono
L'utilisation de ces préactionneurs, bien que simple en terme de mise en
œuvre, présente un réel danger. En effet, il n'est pas possible d'installer une
commande en très basse tension. De ce fait, l'utilisateur intervient directement
sur le circuit de puissance.
Après une coupure de l'alimentation générale, l'appareil restant en position
fermée, il y a risque de redémarrage intempestif lors du rétablissement de
l'alimentation : ici aussi, risque d'électrocution.
A propos du contacteur :
Un contacteur comporte :
Une bobine, siège d'un champ électromagnétique, qui attire les contacts
lorsqu'elle est alimentée. Elle appartient au circuit de commande. La
caractéristique principale d'une bobine est sa tension d'alimentation : 24v, 48v,
240V alternatif ou continu.
Trois contacts principaux qui établissent l'alimentation d'un moteur
triphasé. Une des caractéristiques de ces contacts est le pouvoir de coupure qui
dépend de la puissance du moteur à alimenter.
Un contact auxiliaire utilisé dans le circuit de commande. Son pouvoir de
coupure est beaucoup plus faible. Il peut être normalement ouvert (NO repère 13-
14) ou normalement fermé (NC repère 11-12).
Soit le schéma suivant :
Pour faire démarrer le moteur M1, un appui sur le bouton "marche" S2 (NO)
va amener l'alimentation électrique sur la bobine du contacteur KM1. Cette
dernière étant alimentée, les trois contacts de puissance se ferment et le moteur
est alimenté. Le contact auxiliaire 13-14 se ferme également.
Jean François Krasinski XVI Démarrage moteur mono
Au relâchement du bouton "marche" S2, le moteur M1 continue à tourner
car le contact 13-14 constitue le circuit d'auto-alimentation de la bobine KM1. Il
s'agit en fait d'une fonction "mémoire".
C'est une action sur le bouton "arrêt" S1 (NC) qui va assurer l'arrêt du
moteur M1.
L1
L2 S1
L3
1 3 5 13 A1
KM1 S2
2 4 6 14 A2
M1
Il est à noter que sur les contacteurs, il est possible d'adapter des blocs de
contacts supplémentaires appelés "blocs auxiliaires" ainsi que des blocs de
contacts temporisés qui basculeront après écoulement d'un temps préréglé.
A propos des protections du moteur asynchrone triphasé :
Rappelons qu'un moteur doit être protégé contre :
Les courts-circuits
Les surcharges.
Contre les courts-circuits :
A: les fusibles.
Ces fusibles de type Am ( Accompagnement moteur) sont à fusion
lente". Ils sont capables de supporter la surintensité du démarrage. Ce courant
peut être de 8 à 10 fois le courant nominal du moteur. Le marquage sur le corps du
fusible est de couleur "verte".
Jean François Krasinski XVII Démarrage moteur mono
F1 F2 F3
N L1 L2 L3
B: Le sectionneur à fusibles Q.
Cet appareil offre la possibilité d'isoler électriquement le moteur du réseau
d'alimentation. En cas de coupure du sectionneur par un personnel habilité, ce
dernier doit interdire toute manipulation en verrouillant le sectionneur en
position "d'ouverture".
Le sectionneur n'a pas de pouvoir de coupure ce qui fait que le sectionneur
ne doit pas être utilisé pour couper le courant (sauf cas d'urgence). Il ne doit pas
être manipulé quand le moteur fonctionne car ce sont les fusibles qui établissent le
circuit.
Le sectionneur possède un ou deux contacts dit de "précoupure", sans
fusible, qui permettra de couper le circuit de commande avant le circuit de
puissance.
Si le "neutre" passe dans le sectionneur, il ne faut jamais mettre un
fusible mais une barrette de neutre ( il s'agit d'un tube métallique).
1 2
3 4
4 6
Contre les surcharges ;
Il faut installer un relais thermique. Cet appareil possède une plage de
réglage de l'intensité. Le seuil de réglage est réglé lors de l'installation en prenant
en compte l'intensité nominale du courant nécessaire au moteur. Cette intensité se
trouve sur la plaque signalétique du moteur.
Mais il est possible de la calculer avec :
I = P / (U x 3 x cos )
P = puissance en Watts.
U = tension entre deux phases d'alimentation du réseau en Volts
Cos = facteur de puissance (généralement 0,8).
Jean François Krasinski XVIII Démarrage moteur
mono
Le relais thermique possède deux contacts qui sont utilisés dans le circuit de
commande :
LE CONTACT A OUVERTURE 95 96 COMME AUTORISATION DE
FONCTIONNEMENT
LE CONTACT A FERMETURE 97 98 COMME SIGNALISATION DE DEFAUT.
Il est à noter que ces deux protections thermiques (court- circuit et surcharge)
peuvent être assurées par un seul appareil : le disjoncteur magnéto-thermique.
1 3 5 95 97
2 4 6 96 98
A propos de l'alimentation TBT dans le circuit de
commande.
Pour des raisons de sécurité, il convient d'alimenter les circuits de commande avec
une tension dite "très basse tension de sécurité" 24V.
Cette tension est obtenue à partir du réseau 380V TRI via un transformateur
abaisseur de tension 240V/24V.
Primaire secondaire
Le bobinage "primaire" transforme le courant en champ magnétique ;
Les tôles formant un circuit magnétique, canalisent le champ magnétique vers le
circuit secondaire ;
Le circuit "secondaire" transforme ce champ magnétique en un courant.
Jean François Krasinski XIX Démarrage moteur mono
Le rapport de transformation "k" est la caractéristique du transformateur :
K = U2 / U1 = N2 / N1 = I1 / I2
Avec U2 = la tension du secondaire en volt ;
U1 = la tension au primaire en volt ;
N2 = le nombre de spires du secondaire ;
N1 = le nombre de spires du primaire ;
I1 = le courant traversant le circuit primaire ;
I2 = le courant traversant le circuit secondaire.
NB : un transformateur est réversible ; il peut fonctionner en "élévateur" de
tension si le branchement "primaire-secondaire" est inversé.
NB : les autotransformateurs peuvent produire une tension de 24V, mais
attention ce n'est pas une tension de sécurité. En effet, le "primaire" et le
"secondaire" ne sont pas électriquement isolés. Il existe un point commun
entre les deux circuits et cela peut être la phase.
Pour choisir un transformateur, il convient également de considérer sa puissance.
Cette dernière doit être suffisante pour alimenter l'ensemble des bobines des
contacteurs et tous les récepteurs qui sont alimentés par la basse tension. Cette
puissance s'exprime en Volt-Ampère (VA).
Afin d'assurer la protection électrique d'un transformateur, il convient de disposer
des fusibles dans le circuit primaire et secondaire.
Dans le circuit primaire, le choix du fusible se portera sur les fusibles à fusion lente
de type Am.
Sa valeur se calcule de la manière suivante :
Il faut connaître la tension du primaire ainsi que la puissance du
transformateur. L'intensité traversant théoriquement le circuit sera :
I = P / U1
Avec I en A, P en VA et U1 en V.
F1 F2
Les fusibles seront du type Am à fusion lente.
Pour le bobinage secondaire, la démarche est la même, mais en considérant la
valeur de la tension du circuit secondaire.
I = P / U2
Pour contrôler un transformateur, il faut avant tout le débrancher.
Jean François Krasinski XX Démarrage moteur mono
Puis il va s'agir de mesurer la continuité de chacun des enroulements. Cette
opération s'effectue avec un ohmmètre.
La valeur doit être différente de 0 sinon il s'agit d'un bobinage en court-
circuit.
Mais elle ne doit pas être l'infini (), sinon on est en présence d'un bobinage
coupé.
Puis il convient de mesurer l'isolement entre les deux bobinages, comme pour le
moteur.
Schéma d'alimentation d'un moteur triphasé avec protection thermique.
L1
L2
L3
Q1
Q1
F2
KM1
S1
F2
S2 KM1
X1 X2 X3
A1
Jean François Krasinski XXI Démarrage moteur mono
M1
A2
Nomenclature:
Q1 = sectionneur (si à fusibles, prévoir des modèles Am)
F2 = relais de protection thermique (attention au I de réglage)
KM1 = contacteur de puissance avec un contact NO (13-14)
S1 = bouton poussoir NC "arrêt"
S2 = bouton poussoir N0 "marche".
M1 = moteur triphasé.
Avec un disjoncteur magnéto-thermique :
L1
L2
L3
F1 F1
S1
S2 KM1
Jean François Krasinski XXII Démarrage moteur mono
A1
KM1
A2
X1 X2 X3
A propos des borniers :
Un bornier est une juxtaposition, sur un rail, de blocs de jonctions, choisis
en fonction de la section des fils à raccorder.(Il convient de veiller au choix du
bornier selon le type de rail ).
L'utilisation des borniers permet la réalisation de deux sites indépendants :
1: la partie opérative de la machine et les capteurs qui lui sont associés ;
2: l'armoire de commande.
Les borniers sont désignés par la lettre X.
Les borniers peuvent être indépendants : X1, X2, X3……Xn
Mais on trouve plus souvent les borniers sous la désignation X11 par
exemple : X11 ne se lit pas X onze mais X un. Le chiffre suivant la lettre X donne le
numéro du bornier, alors que le deuxième indique le numéro d'ordre de la jonction.
X X X X X X
1 1 1 1 1 1
1 2 3 4 5 6
Jean François Krasinski XXIII Démarrage moteur
mono
X
Vers récepteurs
Des capteurs.
La présence des borniers permet d'effectuer des contrôles sans démontage des
différents capteurs.
A propos de l'origine d'un dysfonctionnement dans un
circuit électrique :
Il s'agit dans un premier temps de s'informer sur la défaillance.
Il faut donc, dans la mesure du possible, questionner l'utilisateur.
Exemple avant la panne, y a-t-il eu :
Un bruit particulier,
Une odeur,
Un comportement particulier des autres systèmes,
Une panne intermittente.
Puis il va falloir observer l'ensemble du système.
Comme l'état des voyants de signalisation : allumés ou éteints ;
L'état des différents systèmes d'arrêt d'urgence ;
Le comportement des actionneurs (moteur chaud, résistance froide…..)
Et enfin, dans l'armoire de commande.
L'état des protections ayant une visualisation de déclenchement ;
Jean François Krasinski XXIV Démarrage moteur
mono
L'aspect des connexions (trace de brûlures, d'arcs électriques, isolants
fondus……)
L'état des préactionneurs (excité ou non).
Quelle que soit la complexité d'un système, la démarche est toujours la
même :
Questionner l'utilisateur
Observer le système
Observer l'armoire de commande
Ensuite , avec l'aide du dossier technique, des schémas il convient
maintenant d'émettre des hypothèses d'origines possibles du dysfonctionnement. A
chaque hypothèse, il faut associer le ou les contrôles qui vont permettre de valider
ou d'invalider l'hypothèse.
NB : si le dysfonctionnement à provoquer l'ouverture du circuit par les
organes de protection, ne pas rétablir le circuit sans avoir recherché
l'origine de la défaillance.
Il faut créer un organigramme de dépannage.
Dans un premier temps, il faut formuler un constat de défaillance. Ce constat va
être inscrit dans un parallélogramme.
Le moteur ne tourne plus
Puis il faut décider d'un premier test .
Ce test doit être inscrit dans un losange.
Y a-t-il une tension au bornier?
Oui Non
Ce premier test doit permettre d'isoler un ensemble important de composants qui
seront soit impliqués soit acquittés en fonction du résultat du test: oui et non.
Les tests suivants devront être si possible aussi discriminants comme le premier.
Tous les tests effectués doivent permettre d'isoler le ou les éléments "défectueux".
Cet élément sera lui inscrit, dans l'organigramme , à l'intérieur d'un rectangle.
Jean François Krasinski XXV Démarrage moteur mono
Le fusible est coupé
L'organigramme aura cet aspect:
oui
test n°1
non
oui
test n°2
non
Jean François Krasinski XXVI Démarrage moteur
mono
test n°n
Elément "défectueux"
Soit le schéma suivant:
Jean François Krasinski XXVII Démarrage moteur
mono
Protection par fusibles. Disjoncteurs
Perturbations:
Surintensités: surcharges ou court-circuit ;
Surtensions ou baisse de tension.
CAUSES EFFETS Moyens de
protection
SURCHARGE Puissance demandée Echauffement lent Fusibles
plus importante que mais de longue durée Disjoncteurs
la puissance prévue Relais thermiques
COURT CIRCUIT Contact électrique Création d'un arc Fusibles
accidentel entre deux électrique, Disjoncteurs
conducteurs échauffement Relais thermiques
important, risque de Coupure instantanée
fusion. du circuit.
SURTENSION Tension élevée du fait Destruction des Parafoudre
de la foudre ou de la isolants entraînant un Limiteur de
THT. court-circuit. surtension
Relais de surtension
BAISSE DE Déséquilibre du Mauvais Relais à tension
Jean François Krasinski XXVIII Démarrage moteur
mono
TENSION réseau fonctionnement des minimum
récepteurs et des Relais à baisse de
moteurs. tension
Règle générale : La protection contre les surcharges est assurée si
I b In Iz
Avec Ib = courant d'emploi du circuit
In = courant nominal du dispositif de protection
Iz = courant admissible dans les canalisations.
A propos des fusibles :
Symboles:
Fusible Fusible à percuteur Sectionneur à fusible
Ce sont des appareils de protection dont la fonction est d'ouvrir, par la fusion d'un
élément calibré, le circuit dans lequel ils sont insérés.
Ils doivent interrompre le courant lorsque celui-ci dépasse, pendant un temps donné,
une valeur précise.
Les différentes classes.
Modèle gI usage général
protection contre les courts-circuits et les surcharges
utilisé dans les installations domestiques
Jean François Krasinski XXIX Démarrage moteur
mono
Modèle aM accompagnement moteur
protection contre les courts-circuits
Utilisé pour les moteurs à courant alternatif.
Caractéristiques
Tension nominale Un : 250, 400, 500, 600 V.
Courant nominal In : c'est le calibre du fusible.
Courant de non-fusion Inf : (Non Fusing Current)
Valeur de courant pouvant être supportée par l'élément fusible,
pendant un temps conventionnel, sans fondre.
Courant de fusion If : (Fusing Current)
Valeur de courant provoquant la fusion avant la fin du temps
conventionnel.
Courbe de fonctionnement d'un fusible (fig. 1) :
T( s)
Courbe de fusion
Zone de non fusion
Zone indéterminée
In Inf If I (A)
Fig. 1 : courbe de fonctionnement d'un fusible.
Permet, pour un temps conventionnel, de déterminer la valeur du courant de
fusion If et celle du courant de non fusion Inf.
Pouvoir de coupure : c'est le courant maximal qu'un fusible peut couper en évitant
la formation d'un arc électrique qui pourrait retarder dangereusement la coupure
du courant.
Jean François Krasinski XXX Démarrage moteur mono
NB: Les fusibles possèdent toujours des pouvoirs de coupure très élevés ( quelques
kA).
Choix du fusible
A: choix de la classe
B: avec Ib, on détermine le calibre du fusible In avec Ib<In<Iz
C: forme du porte-fusible et nécessité de signaler le fusible
D: La désignation doit comporter :
La classe gI, aM ;
Le calibre In et Un ;
La forme de la cartouche (cylindre, domestique, industriel) ;
Le pouvoir de coupure.
DISJONCTEUR
Définition: C'est un appareil de connexion capable
D'établir, de supporter, d'interrompre le courant dans
les conditions normales
D'établir, de supporter, pendant un temps donné et
interrompre des courants dans des conditions anormales
(par exemple le CC).
Fonctionnement :
A: Etablissement et interruption de courant.
Fonction assurée par des contacts de puissance ou pôles pouvant
Supporter le courant nominal In et le courant de court-circuit Icc.
B: Contrôle des surcharges et court-circuit.
Le courant est contrôlé en permanence par deux systèmes permettant
de détecter :
Les surcharges par un dispositif thermique
Jean François Krasinski XXXI Démarrage moteur
mono
Les courts-circuits par un dispositif magnétique
Commande d'un disjoncteur :
Manuelle pour la mise en marche ou l'arrêt au moyen d'un levier.
Automatique, le système de contrôle précédent agit sur la commande des
pôles et provoque l'ouverture du circuit dans le cas du court-circuit ou de la
surcharge.
La protection contre les surcharges est assurée par le déclenchement thermique
(principe basé sur la différence de dilatation de deux lames de métal soudées ensemble).
L'une a un coefficient de dilatation égal à 0 tandis que l'autre est très élevé. (fig. 2)
Support fixe
Elément bimétallique
Conducteur parcouru
Par un I
Fig. 2 : le bilame.
Jean François Krasinski XXXII Démarrage moteur
mono
Disjoncteur différentiel
Principe: ce dispositif comporte un circuit magnétique en forme de tore sur lequel
sont bobinés le ou les circuits de phase et de neutre. (voir figure 3)
En l'absence de courant de fuite, les flux magnétiques produits par les
bobines s'annulent et la bobine de détection n'est pas sollicitée.
Dés qu'un défaut survient, le déséquilibre des courants entraîne la circulation
d'un flux magnétique dans le tore.
La bobine de détection est le siège d'une f.é.m. (force électromotrice)
alimentant un électroaimant provoquant le déverrouillage du disjoncteur.
Figure 3 : schéma de principe du disjoncteur différentiel monophasé
Jean François Krasinski XXXIII Démarrage moteur
mono
Choix de la sensibilité : Dépend de la valeur de la résistance de la prise de terre et de
la tension limite de sécurité.
Rt = Ul / I avec Rt = résistance de terre en Ohms
Ul = tension limite (12V,24V,50V alternatif)
I = courant de fuite maxi ou sensibilité.
Exemple : Ul = 25V et Rt = 37
La sensibilité sera donc de I = Ul / Rt soit I = 25 / 37 = 0,675 A.
On choisira un disjoncteur d'une sensibilité de 650 mA.
NB: pour les salles d'eau et les prises de courant, l'emploi d'un disjoncteur d'une sensibilité
de 30 mA est obligatoire.
A propos des capteurs :
Le contact électrique reste l'organe privilégié pour l'entrée des informations.
La commande peut être :
Manuelle (bouton poussoir, interrupteur, commutateur….)
Mécanique (contact de position, fin de course….)
Grandeur physique (pression, température….)
Caractéristiques des éléments de contact :
La fonction : contact à ouverture, à fermeture, inverseur….
La tension d'isolement : 200V, 500V, 600V.
Le courant nominal thermique : 1A, 5A, 10A ……
Jean François Krasinski XXXIV Démarrage moteur
mono
La force d'action : 0,5 daN, 1 daN ……….
L'endurance électrique : en millions de manœuvres.
Le bouton poussoir.
La commande de départ de cycle, l'arrêt d'urgence, l'interdiction par un contact à clé,
sont autant de fonctions que doit remplir la commande manuelle.
La partie "commande" est caractérisée par:
Le mode de commande (poussoir, coup de poing …..)
Le diamètre de perçage pour la fixation ( 22, 30 …..)
La protection contre l'environnement (IP (Indice de Protection) XX)
Capteur mécanique de position.
Surtout employé dans les systèmes automatisés afin d'assurer la fonction
"Détecter la position".
Réalisé à partir de micro contacts placés dans un corps de protection et muni d'un
système de commande.
Caractéristiques :
Type de commande et longueur de la course (rectiligne ou angulaire)
La place disponible fixant les dimensions et le mode de fixation.
Le degré de protection (IP xx)
Capteur de grandeurs physiques
Plus les systèmes sont perfectionnés, plus les capteurs seront évolués.
Des capteurs "tout ou rien" nous arrivons à des systèmes transformant la valeur
physique en une tension variable.
Caractéristiques :
A l'entrée du capteur : valeur limite
Durée
Précision
A la sortie du capteur : valeur électrique désirée
Contact "tout ou rien"
Tension proportionnelle
Nombre d'impulsions
Etc.
Capteurs de température, cellules photoélectriques, capteurs de pression, etc.
Relais électromagnétiques.
Permet, à partir d'une information électrique de faible amplitude, d'actionner des
contacts permettant de modifier ou d'amplifier cette information.
Jean François Krasinski XXXV Démarrage moteur
mono
Constitution :
L'organe d'entrée : bobine + circuit magnétique.
L'organe de sortie : les contacts électriques.
Plusieurs fonctions :
Instantanée : "tout ou rien" TOR
Retardée : temporisation
Impulsionnelle : relais de passage.
Multi-impulsionnelle : relais clignoteur.
Remarque : c'est un appareil qui, lors de son alimentation (temporisation TRAVAIL), soit
lors de sa coupure (temporisation REPOS) peut ouvrir ou fermer un ou plusieurs contacts
avec un retard réglable.
Surtout employé en signalisation (clignotement d'une lampe lors d'un défaut).
NB: de plus en plus remplacé par des Automates Programmables Industriels (API).
Symboles.
A1
A2
Relais instantané avec contact NC et NO (Normally Close et Normally Open).
A1 A1
1
A2 A2
Relais à accrochage mécanique.
Jean François Krasinski XXXVI Démarrage moteur
mono
A1
A2
Relais temporisé REPOS (indication de couleur noire)
A1
A2
Relais temporisé TRAVAIL (indication de couleur bleue)
Relais CLIGNOTEUR.
Les contacteurs.
Appareil mécanique de connexion permettant:
La commande automatique d'ouverture ou de fermeture d'un circuit
électrique.
La séparation électrique de la commande du circuit de puissance.
L'assurance des verrouillages électriques.
La détection des coupures.
Jean François Krasinski XXXVII Démarrage moteur
mono
NB : associé à un relais thermique, il assure la protection des moteurs électriques contre les
surcharges.
Repérage dans un schéma : K M ou K A.
Symboles :
A1 13 11 1 3 5
A2 14 12 2 4 6
Bobine circuit contacts auxiliaires contacts de puissance
de commande
Caractéristiques:
Le circuit de puissance:
Nombre de pôles : 2, 3, 4.
Courant d'emploi In : de 9 à 1600 A.
Tension d'emploi : de 500V à 1000V.
Pouvoir de coupure : 8 à 12 fois In.
Le circuit de commande:
Tension de commande : tension d'alimentation de la bobine.
(12V 24V 48V 240V 380V 400V 500V 600V)
Consommation de la bobine : de 7VA à 1000VA.
Tension d'isolement : conforme aux normes IP xx.
Durée de vie : nombre de cycles de fonctionnement (de 1 à 10 millions).
Le relais thermique.
Destiné à la protection des circuits et des moteurs à courant alternatif contre les surcharges,
les coupures de phase, les démarrages trop longs et les décalages du moteur.
Jean François Krasinski XXXVIII Démarrage moteur
mono
Repérages dans un schéma : Fx
Symboles :
1 3 5 95 97 TEST
2 4 6 96 98 STOP
Constitution :
Mise en œuvre d'un "bilame" qui s'incurve lorsque la température augmente. En effet,
plus la température s'élève et plus la déformation est importante, jusqu'à actionner un
contact auxiliaire à ouverture (95-96) qui coupe le circuit de la bobine du contacteur.
Caractéristiques :
Courbe de déclenchement : représente le temps de déclenchement moyen en
fonction des multiples de courant réglables.
Le courant mini de déclenchement est égal à 1,15 fois le courant de réglage.
Tension nominale d'isolement : 600 à 750V.
Tension nominale et courant admissible par les contacts auxiliaires.
Fonction des contacts auxiliaires.
Compensation en température : de -15°C à +45°C.
NB : pour assurer une meilleure adaptation au démarrage des moteurs et sachant que le
relais thermique donne l'image de l'échauffement du moteur, mais non sa température, nous
sommes conduits à différencier les courbes de déclenchement plus ou moins retardées.
Classe 10 : déclenchement normal (démarrage entre 2 et 10s).
Classe 20 : déclenchement "faible tempo." (Démarrage entre 6 et 20s).
Classe 30 : déclenchement "forte tempo." (Démarrage en 30s).
Jean François Krasinski XXXIX Démarrage moteur
mono
Identification des éléments.
Nous désignerons par élément un tout indissociable (ex: contacteur, sectionneur, bouton
poussoir).
Principe :
Sorte de l'élément fonction numéro de l'élément
* ** ***
A propos de *
A ENSEMBLE L INDUCTANCE
C CONDENSATEUR M MOTEUR
F DISPOSITIF DE Q MECANISME DE
PROTECTION CONNEXION
G GENERATEUR R RESISTANCE
H DISPOSITIF DE S CONTACT DE
SIGNALISATION CIRCUIT DE
COMMANDE
K RELAIS T TRANSFORMATEUR
CONTACTEUR
X BORNE FICHE
SOCLE
A propos de **
Nous utiliserons la première lettre de la fonction à réaliser. Par exemple, A pour Auxiliaire.
A propos de ***
C'est le numéro d'ordre de l'élément concerné. (1, 2, 3, n…..)
Jean François Krasinski XL Démarrage moteur mono
NB: dans la norme, la fonction et le numéro de l'élément sont inversés, mais sur les schémas
nous rencontrerons plutôt la disposition suivante:
SORTE FONCTION NUMERO
A propos du marquage des bornes.
Eléments simples : les deux extrémités sont repérées par des chiffres
successifs.
Contact.
Les principaux :
De 1 à 6 en tripolaire.
De 1 à 8 en tétrapolaire.
Les auxiliaires : repérés par deux chiffres.
Le chiffre des unités indique la fonction du contact.
1-2 : contact à ouverture
3-4 : contact à fermeture
5-6 ; 7-8 : contact à fonction spéciale.
Le chiffre des dizaines donne le numéro d'ordre de
chaque contact auxiliaire.
Organe de commande.
Nous utiliserons les repères A1 et A2 pour un enroulement simple.
Pour des enroulements doubles, nous prendrons A1-A2 et B1-B2.
NB : marquage spécial.
Le réseau alternatif :
Phase 1 = L1
Phase 2 = L2
Phase 3 = L3
Neutre = N
L'appareil alternatif :
Phase 1 = U
Phase 2 = V
Phase 3 = W
Conducteur de protection = Pe
Terre = E
Fil positif = L+
Fil négatif = L-
Jean François Krasinski XLI Démarrage moteur mono
Le moteur asynchrone monophasé.
Les moteurs monophasés sont utilisés dans le cas où la puissance demandée serait
relativement faible. (jusqu’à quelques kW)
Principe de fonctionnement :
L’enroulement statorique, alimenté en courant alternatif, produit un champ
magnétique alternatif équivalent à deux champs tournants en sens inverse l’un de
l’autre, à la vitesse angulaire = / p (avec p le nombre de pôles statoriques).
Le rotor peut donc indifféremment tourner dans les deux sens mais il ne peut
démarrer seul.
A propos des champs tournants en monophasé ;
Une aiguille aimantée est placée entre deux bobines identiques branchées en
série et alimentées en courant alternatif. Fig. 1
Fig. 1 : L’aiguille doit être lancée dans un sens ou dans l’autre pour tourner.
L’aiguille s’oriente indifféremment dans l’axe des deux bobines et vibre sans
tourner. Une impulsion manuelle sur l’aiguille lui donne un sens de rotation.
L’aiguille continue à tourner à la fréquence du courant alternatif. Si l’on
recommence l’expérience mais que l’impulsion se donne dans l’autre sens, l’aiguille
va se mettre à tourner dans ce sens. Il apparaît qu’il existe bien deux champs
magnétiques tournant en sens contraire.
Il existe entre les deux bobines un champ magnétique alternatif de même
fréquence que celle du courant.
Le théorème de Leblanc permet d’écrire que le champ magnétique sinusoïdal
b = B cos t, de direction fixe (en fait l’axe des bobines) produit en O, est
équivalent à deux champs magnétiques
de même valeur : module = B/2
de même origine O
Jean François Krasinski XLII Démarrage moteur mono
de rotation inverse
B/2 C
+t b=Bcost
O
-t K A X
B/2 D
Calculons OA
OA = OC + OD
OK = OC cos t
OA = 2 OK = 2 OC t
Remplaçons OA par b et OC par B/2
Le vecteur O, vecteur du champ magnétique au centre O évolue donc entre
les valeurs +B et -B selon l’instant t considéré sur une période.
La fréquence de rotation du champ tournant est déterminée par le nombre de
paires de pôles et par la fréquence du courant.
n= F / p avec n en s-1,F en Hz ,p paires de pôles
A propos des couples.
Chacun des deux champs tournants développe sur le rotor un couple dont le
moment varie en fonction de la vitesse (ou du glissement).
Ces deux couples sont de sens contraires et ont des moments de même
valeur absolue pour deux valeurs opposées de la fréquence de rotation du rotor.
Le moment du couple résultant est obtenu en effectuant la somme des deux
moments. (fig. 2)
Il est naturellement nul quand la fréquence de rotation est nulle.
Le moment du couple à une fréquence donnée est, par suite de l’existence
d’un couple résistant, inférieur à celui que donnerait un moteur à champ tournant
unique.
T (couple)
Jean François Krasinski XLIII Démarrage moteur
mono
vitesse
-n 0 n
Fig. 2 : le moment du couple résultant d’un moteur monophasé.
Pour améliorer ce type de moteur, il faut créer un champ tournant unique.
Pour deux pôles, cela est réalisé en disposant dans le stator deux
enroulements, décalés dans l’espace de / 2 radians et alimentés par des tensions
en quadrature (fig. 3).
U1
0 U1
M1 U2
U2
Fig. 3: moteur diphasé.
L’enroulement principal est alimenté directement par la tension sinusoïdale
monophasée. Le courant qui le traverse est très déphasé en arrière par rapport à la
tension. Un courant en quadrature avec le précédent est obtenu en mettant en série
un condensateur avec l’enroulement auxiliaire. (Fig. 4).
I1
I2
M1
Fig. 4 : moteur fonctionnant en diphasé à partir d’une tension monophasée.
Jean François Krasinski XLIV Démarrage moteur
mono
En choisissant un condensateur de capacité convenable, ce second courant
peut avoir la même intensité efficace que le premier. Le moteur est alors
parfaitement diphasé.
Si les conditions ne sont pas respectées, les courants I1 et I2 ne seront pas
en quadrature et/ou n’auront pas la même intensité efficace. Il existera alors deux
champs tournants en sens inverse l’un de l’autre.
Néanmoins, le couple de démarrage T0 ne sera pas nul car le couple inverse
est ici égal au tiers du couple direct.
Il existe des moteurs à condensateur permanent pour une utilisation sans
contraintes particulières et des moteurs à condensateurs de démarrage.
Le condensateur est éliminé, à la fin de la phase de démarrage, soit par un contact
actionné par un coupleur centrifuge, soit par un relais. (fig. 5 )
On trouve également des moteurs mixtes comprenant un condensateur de
démarrage Cd éliminé dès que le moteur atteint sa fréquence de rotation et un
condensateur permanent Cp pour satisfaire des contraintes plus sévères. ( fig. 6)
I1
M1 C
Fig. 5 : démarrage avec élimination du condensateur par coupleur centrifuge..
I1
M1 Cd Cp
Jean François Krasinski XLV Démarrage moteur mono
Fig. 6 : moteur monophasé comportant un condensateur de démarrage et un condensateur permanent..
A propos des moteurs monophasés à phase auxiliaire.
Ils sont constitués de deux enroulements ;
L’enroulement principal P ( Run en anglais) est constitué d’un gros fil prévu
pour rester en permanence sous tension et capable de supporter l’intensité
nominale du moteur.
L’enroulement auxiliaire A (Start en anglais) est constitué d’un fil plus fil
donc généralement plus résistant.
Cet enroulement est prévu pour permettre le démarrage du moteur. Il fournit
le couple nécessaire à dépasser le couple résistant de la machine entraînée.
Sur un compresseur hermétique, une mesure à l’ohmmètre permet de
repérer les différents enroulements.
Il ne faut pas oublier de débrancher tous les fils arrivant au moteur avant la
mesure. Les valeurs ohmiques des enroulements étant faibles, le calibre choisi pour
la mesure sera petit. (selon le type d’appareil utilisé).
1 la mesure nous donne par exemple
entre 1 et 2 15
entre 1 et 3 5
entre 2 et 3 20
2 3
l’analyse des résultats obtenus permet de dire que :
la résistance la plus forte est entre 2 et 3, la borne 1 est donc le point
commun des deux enroulements ;
la résistance la plus faible est entre 1 et 3, il s’agit donc de l’enroulement P
c’est donc entre 1 et 2 que se trouve l’enroulement A.
NB : Ces mesures se doivent d’être prises avec beaucoup de rigueur.
NB : Une permutation accidentelle entre l’enroulement P et l’enroulement A
va entraîner la destruction du moteur.
Beaucoup de moteurs « grillent » à la suite d’une surchauffe exagérée du
moteur. Les raisons de cette surchauffe sont souvent dues à une surintensité.
Jean François Krasinski XLVI Démarrage moteur
mono
L’origine de cette surintensité peut être due à un défaut électrique (surtension,
chute de tension prolongée, mauvais réglage des sécurités, problèmes liés à la
connectique) ou à un défaut « frigorifique »( HP trop importante, acides dans le
circuit) ou encore à un défaut mécanique (grippage …).
Un des enroulements peut être coupé. Un ohmmètre placé sur les bornes des
enroulements indique une résistance infinie ( ). La valeur ohmique des
enroulements varie entre quelques dizaines d’ohms pour les « petits » moteurs et
quelques dixièmes d’ohms pour les « gros » moteurs.
Il peut y avoir un court circuit entre deux enroulements. La mesure s’effectue
ici avec un ohmmètre placé sur un fort calibre. Attention, il est impératif de
déconnecter le moteur (câbles d’alimentation et/ou barrettes de couplage). Un
résultat de mesure donnant une valeur proche de 0 indique la présence d’un court
circuit.
NB : Dans le cas d’un moteur à enroulement auxiliaire , lorsque les deux
enroulements ne sont pas déconnectables, c’est l’analyse des trois mesures
qui va nous renseigner. En cas de défaut, il existera des incohérences dans
les différentes mesures.
Un des enroulements peut être à la masse. La résistance d’isolement d’un
moteur (à l’état neuf) est d’environ 1000 M. Avec l’âge, cette résistance diminue et
peut chuter jusqu’à 10 M. On convient de considérer qu’à partir d’une résistance
d’isolement de 1 M, il faille prévoir le remplacement du moteur.
Si la « masse » est franche, la mesure donne une valeur proche ou égale à O au
lieu de l’infini . Le calibre choisi pour la mesure sera le plus fort.
NB : Lors de la mesure, il ne faut pas toucher les fiches de mesure avec les
doigts sous peine de fausser la mesure.
Cependant, une mise à la masse d’un enroulement peut être moins franche
et provoquer le déclenchement des protections (disjoncteur In) sans pour autant
être décelable avec un ohmmètre classique. Il faut alors utiliser un ohmmètre à
magnéto. Cet appareil permet de mesurer des résistances d’isolement en utilisant
une tension continue de 500V.
Après impulsion électrique, l’appareil indique une valeur proche de l’ si les
enroulements sont bien isolés et entre eux et la masse mais aussi entre chacun
d’entre eux.
Jean François Krasinski XLVII Démarrage moteur
mono
L'analyse du schéma montre que :
Le moteur M1 est alimenté par six fils sur les bornes U1,V1,W1 et U2,V2,W2.
Le moteur M1 est alimenté par trois contacteurs KM:
KM1: contacteur de ligne d'alimentation;
KM2: contacteur "étoile";
KM3: contacteur "triangle".
Des contacts temporisés de KM2
Un contact "NO" de KM3 se trouvant sur le circuit de KM1;
Un contact "NO" de KM1 se trouvant sur le circuit de KM3;
Des bornes de sorties et d'entrées.
Mais que dire à propos du démarrage Etoile-Triangle?
Un moteur asynchrone, au démarrage, nécessite une intensité qui atteint
fréquemment au moins 6 fois le courant nominal.
I max = 6 x I n
Le démarrage Etoile-Triangle va permettre de diminuer cette pointe de courant.
Il s'agit de:
Dans un premier temps, démarrer le moteur en étoile.
Les bobinages reçoivent une tension plus faible que celle du réseau
U étoile = U nominale / 3
La surintensité nécessaire au démarrage se trouve déduite dans le même
rapport de 3.
Le couple, quant à lui, est divisé par trois.
6 In
5 In
4 In
3 In
2 In
Jean François Krasinski XLVIII Démarrage moteur
mono
In
0 0,25 0,5 0,75 1 vitesse nominale
Quand la vitesse est stabilisée, le moteur est couplé en triangle, chaque bobinage
reçoit la tension normale d'utilisation
.Le moteur tourne normalement.
NB : Le démarrage étoile-triangle ne peut s'appliquer qu'à des moteurs dont
le couplage normal est en triangle.
Moteur 240V/400V sur le réseau 380V TRI
Moteur 380V/660V sur le réseau 660V TRI
NB : ce démarrage convient plus particulièrement aux machines démarrant à
vide ou ayant un faible couple résistant.
NB : Le temps pendant lequel le moteur est couplé en étoile dépend de
l'inertie de la machine entraînée.
NB : Il n'y a pas de barrettes dans la boite à bornes du moteur.
Soit le schéma suivant:
F1 est fermé, un appui sur S2 entraîne l'ali-
mentation de KM1 qui relie U2,V2et W2. Le
couplage "étoile" est réalisé.
La bobine de KM2 est excitée, le moteur M1
est alimenté et la temporisation est lancée.
Au relâchement de S2, il existe une auto-ali
entation de KM1 et de KM2.
Jean François Krasinski XLIX Démarrage moteur
mono
F1
F2 T1 F3 S1
KM1
S2 KM2
KM2 KM3
KM2
KM3
M1 KM1 KM2 KM3
Jean François Krasinski L Démarrage moteur mono
A la fin de la temporisation, il y a ouverture de KM1, la fermeture de KM3 qui relie U1-
V1, U2-V2, W1-W2 réalisant ainsi le couplage "triangle". Deux contacts de KM1 et de
KM3 interdisent l'alimentation simultanée de KM1 et de KM3.
Pour arrêter la machine, une impulsion sur S1 sera nécessaire.
A propos des contacts temporisés/
La fonction temporisation est symbolisée par un demi-cercle relié par deux traits au
contact qui est temporisé.
Si le demi-cercle a son centre du coté du contact , l'écoulement du temps commencera à
la mise sous tension de la bobine.
Si le centre est à l'opposé du contact, l'écoulement du temps commencera à la coupure
de l'alimentation de la bobine qui commande ce contact.
Les contacts temporisés peuvent être NO ou NC.
Les deux types de temporisations, au travail et au repos, se reconnaissent généralement
à la couleur du bouton ( pour Télémécanique, bleu au travail, noir au repos ).
Le fonctionnement de la temporisation peut être décrit sous la forme d'un diagramme ou
chronogramme.
Soit le schéma suivant:
S1 KA1 10s
5s
KA1 KA1 KA2
A1 A1
A2 A2
Jean François Krasinski LI Démarrage moteur mono
KA1 H1 KA2 H2 H3
Au repos H3 est alimentée;
A la fermeture de S1, ce sont les bobines KA1 et KA2 qui sont excitées ainsi que H1.le
voyant H3 est éteint.
10 secondes plus tard, H2 'est alimenté.
A l'ouverture de S1 les contacteurs KA1 et KA2 ainsi que les voyants H1 et H2 ne sont
plus alimentés. 5 secondes plus tard, le voyant H3 se trouve alimenté.
H3
H2
H1
KA2
KA1
S1
repos S1 2 4 6 8 10 S1 2 4 6 temps en s
= =
1 0
A propos de la numérotation des bornes.
Les numéros des bornes sont marqués à droite du conducteur.
Les bornes des contacts principaux sont numérotés de 1 à 6 en tripolaire, de 1 à
8 en tétrapolaire.
Les numéros impairs sont en haut, les pairs en bas et par ordre croissant de
gauche à droite.
Les bornes des contacts auxiliaires instantanées, ainsi que les contacts des
poussoirs sont désignés par un nombre à deux chiffres:
Le chiffre des unités indique le contact NO en 3 et 4
NC en 1 et 2
Le chiffre des dizaines indique le numéro d'ordre du contact sur l'appareil.
Les bornes des contacts temporisés sont imposées:
NO en 67 et 68
NC en 55 et 56
Jean François Krasinski LII Démarrage moteur mono
Les bornes des bobines d'un contacteur K sont notées A1 et A2
Pour les bornes d'un relais thermique ce sont:
NO en 97 et 98
NC en 95 et 96
Le moteur triphasé asynchrone.
Ce moteur à rotor en court-circuit ou en cage d'écureuil est un moteur électrique le plus
utilisé grâce à sa robustesse, son prix peu élevé et sa grande durée de vie.
Les deux principales parties d'un moteur sont : (voir fig.1)
Le stator : lieu de production d'un champ magnétique tournant.
Le rotor : entraîné par le champ tournant, il produit de l'énergie mécanique.
Le rapport entre l'énergie mécanique disponible et l'énergie électrique absorbée s'appelle le
rendement ETA () du moteur et s'exprime sous la forme d'un pourcentage (%).
ENERGIE MECANIQUE
ENERGIE
ELECTRIQUE
transformer CHALEUR
MOTEUR
Fig.1: Le moteur asynchrone en vue éclatée.
Jean François Krasinski LIII Démarrage moteur mono
La constitution du stator :
Constitué d'un empilage de tôles magnétiques sur lesquelles est surmoulée la
carcasse. (voir fig.2)
Les tôles comportent des encoches dans lesquelles sont logés les bobinages.
Fig.2 : le stator
Entre fer
bobinages
bâti
A propos du champ tournant :
Le stator est composé de trois enroulements identiques.
Ces trois bobinages sont placés à 120° l'un de l'autre. (voir fig.3)
Fig.3: le champ tournant.
L1
Champ tournant
N L3
L2 N
Jean François Krasinski LIV Démarrage moteur mono
Ils sont alimentés par une source d'énergie électrique triphasée.
Les trois bobinages recevront l'un après l'autre le courant maximum et produiront à
tour de rôle le champ magnétique maximum.
On obtient alors un champ magnétique tournant. Pour faire tourner le champ dans
l'autre sens, il suffit d'intervertir deux fils d'alimentation.
A propos de la fréquence de rotation :
La fréquence du courant, en France, est de 50 Hz (ou 50 périodes par seconde), le
champ magnétique tourne à une fréquence de 50 rotations par seconde, soit 3000 tours par
minute.
Dans la pratique, il se produit un glissement entre le champ tournant et le rotor. La
fréquence de rotation du rotor est, en charge normale, de 2850 tours à la minute.
Pour diminuer cet effet de glissement, pour améliorer la rotation du moteur et obtenir
une fréquence de rotation différente, il suffit de divisé chaque bobinage en deux parties
égales et opposées. (voir fig.4)
Fig.4: Le stator par rapport à la fréquence.
A propos du raccordement des bobinages à la boite à bornes :
Les extrémités des bobinages sont raccordées, par le constructeur, à la boite à bornes.
(voir fig.5)
Fig.5: le branchement des bobinages.
Jean François Krasinski LV Démarrage moteur mono
A propos du repérage des bornes :
Nous trouvons les repérages suivants : (voir fig.6 et 7)
U
U1 V W
1 1 1
U V W
2 2 2
Fig.6:Moteur récent
Fig.7:Moteur ancien
U V W
Z X Y
La constitution du rotor :
C'est un empilage de tôles magnétiques reliées entre elles par des barres conductrices
en aluminium. Ces barres forment "la cage d'écureuil". (voir fig.8)
Fig.8: le rotor.
Le rotor est monté sur deux roulements à billes logés dans les flasques. Ces
roulements sont graissés à vie et ne nécessitent donc pas de maintenance préventive.
Jean François Krasinski LVI Démarrage moteur mono
Le symbole : voir fig.9
Fig.9: symbole d'un moteur asynchrone triphasé.
U1 V1 W1
INSTALLER UN MOTEUR ASYNCHRONE TRIPHASE.
Cette opération comporte deux étapes :
Coupler le moteur, c'est à dire installer les barrettes.
Raccorder le moteur au réseau d'alimentation.
A propos de "coupler un moteur" :
Première étape : lire la plaque signalétique d'un moteur. Voir fig.10
16015 ANGOULEME
LEROY SOMMER
MOTEUR ASYNCHRONE NFC 51 111 NOV 93
Type : LS 90 z 595257/3
kW 1,5 cos 0,78 V 240 A 6,65
Rd% 76 V 400 A 3,84
Tr/min 1440 Isolt classe Ambce °C 40
Hz 50 Ph 3 S.ce S1
Roulements made in
Autres pièces made in France
Fig.10:la plaque signalétique d'un moteur asynchrone triphasé.
Il faut repérer les tensions , ici 240V et 400V. la plus petite de ces tensions est celle qui
doit alimenter les bobinages .
La tension 240V correspond :
A la tension simple du réseau 240/400V (tension entre phase et neutre)
Jean François Krasinski LVII Démarrage moteur mono
A la tension composée du réseau 135/240V(tension entre phases).
Deuxième étape : installer les barettes de couplage.(voir fig.11 et 12)
Si la tension du réseau qui correspond à la tension nécessaire est la tension simple, le
raccordement des bobinages se présente de la manière suivante :
Fig.11: branchement "étoile"
NB: le fil "neutre" devrait se trouver sur les bornes U2 ou V2 ou W2, mais les trois bobinages
U1U2,V1V2 et W1W2 étant identiques, le courant nécessaire est le même sur les trois phases,
on dit que le montage est "équilibré". Il n'y a pas de courant qui parcoure le fil de neutre , en
effet la somme algébrique des courants qui parcourent chacune des phases à l'instant "t" est
toujours nulle. On peut écrire I1 + I2 + I3 = 0
Puisqu'il n'y a pas de courant, on peut supprimer le fil "neutre".
Ce montage est appelé "étoile".
De même, si la tension du réseau qui correspond à la tension nécessaire est la tension
composée U12, U23, U31, le raccordement des bobinages se présente ainsi :
Fig.12: branchement "triangle".
Jean François Krasinski LVIII Démarrage moteur
mono
La borne U1 est reliée à la borne W2, la borne V1 à la borne U2 et la borne W1 à la borne V2.
Ce montage est appelé en "triangle".
NB: l'intensité absorbée par le moteur dépend essentiellement du réseau, donc du couplage.
Indications 127 / 240V 240 / 380V 380 / 660V
réseau
220 V TRI En étoile En triangle Impossible car régime
de sous tension.
380 V TRI Impossible car régime En étoile En triangle
de surtension.
Comment raccorder le moteur au réseau ?
Après s'être assuré que le moteur est protégé contre les surcharges et les courts-
circuits, on peut procéder à son branchement dans le circuit de puissance.
Choisir convenablement le câble d'alimentation.
Doit comporter 4 conducteurs dont un "jaune/vert".
Sa section doit correspondre aux caractéristiques du moteur en terme de
courant ( on prend au minimum 1mm2 pour un courant de 5 ampères ).
La gaine de protection doit être conforme aux règlements de sécurité.
Comment raccorder un moteur asynchrone triphasé ?
Avant toute intervention, il convient, pour répondre aux exigences des
règles de sécurité, de :
Supprimer l'alimentation de la machine concernée ;
Repérer et débrancher les fils d'alimentation du moteur ;
Enlever les barrettes de couplage.
Le contrôle électrique s'effectue en trois étapes.
1ère étape : le contrôle de continuité des bobinages.
Pour cette opération, l'appareil utilisé est un ohmmètre calibré sur une petite échelle.
Les points de mesure sont :
Jean François Krasinski LIX Démarrage moteur mono
Entre U1 et U2 ( entre U et X) fig. 13
Fig.13: mesure de continuité 1er enroulement.
Entre V1 et V2 ( entre V et Y) fig. 14
Fig.14: mesure de continuité 2ème enroulement.
Entre W1 et W2 ( entre W et Z) fig. 15
Fig. 15 : mesure de continuité 3ème enroulement.
Les résultats attendus sont :
Une résistance différente de 0 ;
Une résistance différente de ;
Des valeurs de résistances identiques sur les trois bobinages.
NB: Une résistance nulle indique un court-circuit.
Une résistance infinie indique un bobinage coupé.
2ème étape : le contrôle d'isolement des bobinages entre eux.
On utilise l'ohmmètre sur un calibre élevé (> à 1 M).
Jean François Krasinski LX Démarrage moteur mono
Les points de mesure sont les suivants :
Entre U1 et U2 fig. 16
Fig.16: mesure de l'isolement entre les bobinages.
Entre V1 et V2 fig. 17
Fig.17: mesure de l'isolement entre les bobinages.
Entre W1 et W2.fig.18
Fig.18: mesure de l'isolement entre les bobinages.
Les résultats attendus sont :
Une résistance très importante dépassant le M pour les 3 mesures.
3ème étape : le contrôle d'isolement entre les bobinages et la masse du moteur.
Il faut s'assurer, à l'ohmmètre, que la borne de masse du moteur située à l'intérieur de la
boite à bornes est bien reliée à la masse du moteur ( R=0). Attention à la peinture qui isole
et fausse la mesure.
Le matériel est un mégohmmètre électronique ou à magnéto. Cet appareil délivre
une tension de 500V obligatoire pour l'efficacité de ce contrôle.
Les points de mesure sont :
Entre U1 et la masse fig.19
Jean François Krasinski LXI Démarrage moteur mono
Fig.19: mesure d'isolement par rapport à la masse.
Entre U2 et la masse fig.20
Fig.20: mesure d'isolement par rapport à la masse.
Entre U3 et la masse fig.21
Fig.21: mesure d'isolement par rapport à la masse.
Les résultats attendus sont :
Une résistance très importante, au moins égale à 5000 par volt, soit 1,9 M
pour un moteur branché en 380VTRI.
Jean François Krasinski LXII Démarrage moteur mono
Das könnte Ihnen auch gefallen
- 200 Questions Isolées en QCM-Orthopédie TraumatologieDokument222 Seiten200 Questions Isolées en QCM-Orthopédie TraumatologieZohra Targui67% (3)
- 1 Cours Catenaire Date Inconnue FraDokument130 Seiten1 Cours Catenaire Date Inconnue Frasnoofsnoof100% (5)
- Demarreur PDFDokument13 SeitenDemarreur PDFRiahi Rezeg100% (1)
- Exercices UML CorrigeDokument67 SeitenExercices UML Corrigehichem100% (2)
- NT Demarrages Moteurs Mono 082018Dokument17 SeitenNT Demarrages Moteurs Mono 082018Dominique PalicotNoch keine Bewertungen
- Moteur Monophasé 1Dokument6 SeitenMoteur Monophasé 1EL Hajifi EL HajifiNoch keine Bewertungen
- InterfaçageDokument9 SeitenInterfaçageDorsaf YaichNoch keine Bewertungen
- Demarage Des Moteurs MonophasesDokument7 SeitenDemarage Des Moteurs MonophasesMohamed LaribiNoch keine Bewertungen
- Chapitre 3 Moteur À Courant ContinuDokument14 SeitenChapitre 3 Moteur À Courant ContinuFatima Zahra Amalou100% (1)
- Réalisation D'un Compensateur Statique de L'énergie Réactive.Dokument38 SeitenRéalisation D'un Compensateur Statique de L'énergie Réactive.Fils Du Sud100% (3)
- Allumage Version CorrigeeDokument25 SeitenAllumage Version Corrigeewa3ri babaks100% (1)
- Physique C Chap6 Photos Manip CoursDokument3 SeitenPhysique C Chap6 Photos Manip CoursAdamNoch keine Bewertungen
- Diagnostiquer Depanner Reparer DynamoDokument5 SeitenDiagnostiquer Depanner Reparer DynamoMickael KervicheNoch keine Bewertungen
- Le Metier D dimetisOLOHahhsjtionDokument10 SeitenLe Metier D dimetisOLOHahhsjtionpianogospeljazz pianogospeljazzNoch keine Bewertungen
- Relais TempoDokument7 SeitenRelais TempoCLAUDENoch keine Bewertungen
- 10 Le Compresseur HermetiqueDokument6 Seiten10 Le Compresseur Hermetiqueيزيد عبد الحميد منصور0% (1)
- Moteur Brushless 7Dokument27 SeitenMoteur Brushless 78191424525100% (1)
- Charge Et Décharge D'un Condensateur PDFDokument2 SeitenCharge Et Décharge D'un Condensateur PDFSaidi Abdelillah100% (1)
- 1 AppareillageDokument19 Seiten1 AppareillageLeNINJANoch keine Bewertungen
- 1100 RegulateursDokument9 Seiten1100 RegulateursKammoeNoch keine Bewertungen
- Bloc Note ElectrotechniqueDokument7 SeitenBloc Note ElectrotechniqueStephane SiluéNoch keine Bewertungen
- 20 ALi MoteurMonophaseDokument26 Seiten20 ALi MoteurMonophasetestNoch keine Bewertungen
- Le Moteur monophaséPPDokument18 SeitenLe Moteur monophaséPPLebon KATABANANoch keine Bewertungen
- Psy5060 FR 01 2009Dokument36 SeitenPsy5060 FR 01 2009Mahfoudh Ould AbderrahmaneNoch keine Bewertungen
- La Machine Synchrone 3 È Année Semestre 2 2017-2018-1Dokument46 SeitenLa Machine Synchrone 3 È Année Semestre 2 2017-2018-1TRAORE TechnologiesNoch keine Bewertungen
- Cours - 02 - Installation Électrique en Automatique PDFDokument6 SeitenCours - 02 - Installation Électrique en Automatique PDFالإخبارية DZNoch keine Bewertungen
- Fonction Distribuer Preactionneurs Electriques ExercicesDokument13 SeitenFonction Distribuer Preactionneurs Electriques ExercicesvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvNoch keine Bewertungen
- 5384 BB 24 CF 6 AbDokument24 Seiten5384 BB 24 CF 6 AbHoussam BoularasNoch keine Bewertungen
- QuestionDokument5 SeitenQuestionHamadouNoch keine Bewertungen
- Synchronisation Et CouplageDokument5 SeitenSynchronisation Et Couplageabdellah faqdaniNoch keine Bewertungen
- Rapport ElectroDokument18 SeitenRapport Electroessnoussioumaima8Noch keine Bewertungen
- Ch31 Les Preactionneurs ElectriquesDokument7 SeitenCh31 Les Preactionneurs ElectriquesMohamed LarbiNoch keine Bewertungen
- TEC 588 - TP3 - Etude Du NE 555Dokument11 SeitenTEC 588 - TP3 - Etude Du NE 555JugurthaHadjarNoch keine Bewertungen
- Cour Hacheur SerieDokument15 SeitenCour Hacheur SerieYasser El hamriNoch keine Bewertungen
- MCCDokument7 SeitenMCCyousamlNoch keine Bewertungen
- Présentation 3Dokument20 SeitenPrésentation 3Amina RaouyNoch keine Bewertungen
- C 642 Alternate Urs 2Dokument60 SeitenC 642 Alternate Urs 2Julia Batista MéndezNoch keine Bewertungen
- Support - TP3-Moteur Monophasé PDFDokument11 SeitenSupport - TP3-Moteur Monophasé PDFFarid Khoucha100% (1)
- Quiz Pont en H Et Moteur DC SolutionDokument3 SeitenQuiz Pont en H Et Moteur DC SolutionAnna VianinNoch keine Bewertungen
- Moteurs SpéciauxDokument7 SeitenMoteurs SpéciauxMoulayMoulyNoch keine Bewertungen
- Le Moteur AsynchroneDokument13 SeitenLe Moteur AsynchroneRomiald Noussi SohNoch keine Bewertungen
- Comportement Du Circuit MC& Avec Diode de Roue LibreDokument9 SeitenComportement Du Circuit MC& Avec Diode de Roue Libreسكينة مريمNoch keine Bewertungen
- Le Moteur Asynchrone: 1. FonctionDokument36 SeitenLe Moteur Asynchrone: 1. Fonctionmikaja fitiavana0% (1)
- ch31 Les Preactionneurs ElectriquesDokument7 Seitench31 Les Preactionneurs Electriquesrami kafiNoch keine Bewertungen
- Devoir M.ins.e PDFDokument12 SeitenDevoir M.ins.e PDFpesdjockNoch keine Bewertungen
- These LALLBEEHARRY NavishDokument26 SeitenThese LALLBEEHARRY NavishSARANoch keine Bewertungen
- Le Metier D EstipationDokument2 SeitenLe Metier D Estipationpianogospeljazz pianogospeljazzNoch keine Bewertungen
- Cours Schéma p1 p2Dokument94 SeitenCours Schéma p1 p2khelifihadil1Noch keine Bewertungen
- 1) TransformateurDokument6 Seiten1) Transformateurhenninour23Noch keine Bewertungen
- Dmarrage Moteur Asynchrone MonophasDokument3 SeitenDmarrage Moteur Asynchrone MonophasRomuald GuyayaNoch keine Bewertungen
- 4.alternateur 2Dokument52 Seiten4.alternateur 2dfgmy100% (1)
- DemarreurDokument13 SeitenDemarreurpabergeNoch keine Bewertungen
- Phénomène DautoinductionDokument9 SeitenPhénomène Dautoinductionernestadou7800Noch keine Bewertungen
- TP SchémaDokument7 SeitenTP SchémaSouf IaneNoch keine Bewertungen
- Transformateur de CourantDokument12 SeitenTransformateur de CourantLydia MezoughNoch keine Bewertungen
- (French) How Does Boost and Buck - Boost Converter Work - DC-DC Converter - 2 (DownSub - Com)Dokument5 Seiten(French) How Does Boost and Buck - Boost Converter Work - DC-DC Converter - 2 (DownSub - Com)Ange BredouNoch keine Bewertungen
- TP 2 RESMA M1 Transformateurs MonophasésDokument19 SeitenTP 2 RESMA M1 Transformateurs MonophasésYou BgNoch keine Bewertungen
- ProjetDokument10 SeitenProjetLachgar KoukaNoch keine Bewertungen
- Demarrage Avec Des ResistancesDokument3 SeitenDemarrage Avec Des ResistanceshocinekhanfriNoch keine Bewertungen
- Exercices d'optique et d'électromagnétismeVon EverandExercices d'optique et d'électromagnétismeBewertung: 5 von 5 Sternen5/5 (1)
- DemarrageDokument6 SeitenDemarrageبن عودة100% (1)
- Traitement D'airDokument161 SeitenTraitement D'airSellami AhmedNoch keine Bewertungen
- Description PCDokument2 SeitenDescription PCAlexandre Kpangny BéniNoch keine Bewertungen
- Dan T FC-300Dokument92 SeitenDan T FC-300DENOUNoch keine Bewertungen
- CV 149a-Toi Qui Disposes A5Dokument1 SeiteCV 149a-Toi Qui Disposes A5DENOUNoch keine Bewertungen
- Etude Thermodynamique Des Machines FrigorifiqueDokument52 SeitenEtude Thermodynamique Des Machines FrigorifiqueMohamed Raziki100% (7)
- M08 - Application Des Notions élémentaires de La Bureautique BTP-TDBDokument95 SeitenM08 - Application Des Notions élémentaires de La Bureautique BTP-TDBmaison_d_hotesNoch keine Bewertungen
- CV 17-A Celui Qui Nous A Laves A4-avecMusiqueDokument1 SeiteCV 17-A Celui Qui Nous A Laves A4-avecMusiqueDENOUNoch keine Bewertungen
- SlidesDokument97 SeitenSlidesCours TP KlmNoch keine Bewertungen
- Algo T1Dokument129 SeitenAlgo T1Midou TounsiNoch keine Bewertungen
- VaneDokument319 SeitenVaneAbdeldjalil AchourNoch keine Bewertungen
- Utilisation Console - Equipements Audio HFDokument5 SeitenUtilisation Console - Equipements Audio HFndaikai DjouldeNoch keine Bewertungen
- Algorithm eDokument48 SeitenAlgorithm eneilNoch keine Bewertungen
- Evapco Condensation Frigo Efficace - CEE Sur TAR - 2016Dokument31 SeitenEvapco Condensation Frigo Efficace - CEE Sur TAR - 2016DENOUNoch keine Bewertungen
- Aqua4 Iom 1405 FDokument36 SeitenAqua4 Iom 1405 FhossamNoch keine Bewertungen
- Buch Hydraulik-GrundlagenundKomponenten FRZDokument27 SeitenBuch Hydraulik-GrundlagenundKomponenten FRZHelyette KingueNoch keine Bewertungen
- Guide Technique Installations de Refroidissement D'eauDokument56 SeitenGuide Technique Installations de Refroidissement D'eauzouhirt100% (1)
- Forane 134a Mollier Diagram SiDokument1 SeiteForane 134a Mollier Diagram SiDENOU100% (1)
- Diagramme Lecot LejeuneDokument11 SeitenDiagramme Lecot LejeuneDENOUNoch keine Bewertungen
- Catalogue Commercial Garnitures Mechaniques StramekDokument12 SeitenCatalogue Commercial Garnitures Mechaniques StramekDENOUNoch keine Bewertungen
- Egger Abdichtungen FRDokument4 SeitenEgger Abdichtungen FRDENOUNoch keine Bewertungen
- 3Dokument14 Seiten3DENOUNoch keine Bewertungen
- Pomberie CCBDokument1 SeitePomberie CCBDENOUNoch keine Bewertungen
- Garniture Mécanique Double: Notice de Service ComplémentaireDokument12 SeitenGarniture Mécanique Double: Notice de Service ComplémentaireDENOUNoch keine Bewertungen
- Fiches de TraitementDokument61 SeitenFiches de Traitementtallef001Noch keine Bewertungen
- DOC00024276Dokument60 SeitenDOC00024276Bacem ChNoch keine Bewertungen
- IngénierieDokument16 SeitenIngénierieMafiazoNoch keine Bewertungen
- Ferme-Portes 610 620 630Dokument9 SeitenFerme-Portes 610 620 630attiori fabriceNoch keine Bewertungen
- Fiche Technique Ferme-Porte Série 610Dokument2 SeitenFiche Technique Ferme-Porte Série 610DENOUNoch keine Bewertungen
- Sites Potentiels en Substances Utiles (Tunis°Dokument112 SeitenSites Potentiels en Substances Utiles (Tunis°Ons Ben Abdallah Kalai100% (1)
- ImpressionDokument17 SeitenImpressionAbdelaziz AbdelazizNoch keine Bewertungen
- Texte 3 - "Les Colchiques" (Apollinaire, Alcools Extrait N°1)Dokument2 SeitenTexte 3 - "Les Colchiques" (Apollinaire, Alcools Extrait N°1)Florence MauriesNoch keine Bewertungen
- Epreuve Pratique CGM Chaudronnerie 2021Dokument34 SeitenEpreuve Pratique CGM Chaudronnerie 2021ben ayed bouraouiNoch keine Bewertungen
- Le Renouveau Rural (Algérie - 2006)Dokument435 SeitenLe Renouveau Rural (Algérie - 2006)cissmaroc100% (3)
- Electromag c13 SiteDokument36 SeitenElectromag c13 Siteabdelilah.hassouneNoch keine Bewertungen
- Département de Génie Mécanique Option - Génie Des Matériaux Mémoire de Fin D Étude en Vue de L Obtention Du Diplôme de Master en Génie Des MatériauxDokument120 SeitenDépartement de Génie Mécanique Option - Génie Des Matériaux Mémoire de Fin D Étude en Vue de L Obtention Du Diplôme de Master en Génie Des MatériauxmoummouNoch keine Bewertungen
- Guide Anglais 1èDokument13 SeitenGuide Anglais 1èMike KeitaNoch keine Bewertungen
- Guide Des Protocoles Gynecologie-ObstetriqueDokument159 SeitenGuide Des Protocoles Gynecologie-Obstetriquejeannette bonivhe100% (1)
- StatiqueDokument4 SeitenStatiqueMounire BenmoussaNoch keine Bewertungen
- Engin BTP Et Terrassement-1Dokument37 SeitenEngin BTP Et Terrassement-1SamuelNoch keine Bewertungen
- Croquis Quartier Batignolles ParisDokument23 SeitenCroquis Quartier Batignolles ParisBruno BROCHARDNoch keine Bewertungen
- Environnement Et Changement Climatique Au MarocDokument90 SeitenEnvironnement Et Changement Climatique Au MarocHichamLahbil100% (1)
- Chap 1Dokument14 SeitenChap 1NoussaNoch keine Bewertungen
- 30ème FOIRE DE LA PRODUCTION ALGÉRIENNE - SAFEXDokument5 Seiten30ème FOIRE DE LA PRODUCTION ALGÉRIENNE - SAFEXnabil heddadNoch keine Bewertungen
- Exercice MRPDokument2 SeitenExercice MRPMõűñã BõūãbîdNoch keine Bewertungen
- 4 InfrastructureDokument27 Seiten4 InfrastructureAhmed MediouniNoch keine Bewertungen
- Accessoire Pour Distributeurs A Commande Electrique Connecteurs BobinesDokument5 SeitenAccessoire Pour Distributeurs A Commande Electrique Connecteurs Bobinesfcbarca2020ifyNoch keine Bewertungen
- Tpe Seminaire Et ConferenceDokument19 SeitenTpe Seminaire Et ConferenceErickNoch keine Bewertungen
- Livre Secourisme GénéralDokument91 SeitenLivre Secourisme GénéralAmalia Dragan-SuciuNoch keine Bewertungen
- Al Simiya La Magie Des LettresDokument10 SeitenAl Simiya La Magie Des LettresMoussa Bana100% (1)
- FT 10 Dénombrement CSRDokument2 SeitenFT 10 Dénombrement CSRihab hentourNoch keine Bewertungen
- Transmission Puissance 1ere Doc ÉlèveDokument5 SeitenTransmission Puissance 1ere Doc ÉlèveMarouen Mekki100% (1)
- 6180Dokument827 Seiten6180Justyna Podlecka67% (3)
- 2013 - Audit EnergetiqueDokument58 Seiten2013 - Audit EnergetiqueMouhcine HajjoujeNoch keine Bewertungen
- Developpement Dun Systeme de Production Du Biodiesel A Partir Dhuile UtiliseDokument59 SeitenDeveloppement Dun Systeme de Production Du Biodiesel A Partir Dhuile UtiliseyveseoneNoch keine Bewertungen
- Rapport Revue Processus Production Septembre 2023 (2) ADokument16 SeitenRapport Revue Processus Production Septembre 2023 (2) AKOUAMENoch keine Bewertungen
- VELLARD, Jehan - Une Civilisation Du Miel PREVIEWDokument22 SeitenVELLARD, Jehan - Une Civilisation Du Miel PREVIEWResearcherNoch keine Bewertungen