Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1091)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Purpose of Agitation VesselDokument6 SeitenPurpose of Agitation VesselMAHAD ZahidNoch keine Bewertungen
- Chai, Lu PDFDokument80 SeitenChai, Lu PDFparvejNoch keine Bewertungen
- Student Exploration: Sled WarsDokument8 SeitenStudent Exploration: Sled WarsJedi- AbiNoch keine Bewertungen
- Haunched Joint - Capacity DesignDokument9 SeitenHaunched Joint - Capacity Designd_i_z_zNoch keine Bewertungen
- Fluid Mechanics ManualDokument41 SeitenFluid Mechanics ManualrajmaljatNoch keine Bewertungen
- Steel Joints According To Eurocode 3Dokument21 SeitenSteel Joints According To Eurocode 3alfonxxlNoch keine Bewertungen
- Vortex Flowmeter 2Dokument2 SeitenVortex Flowmeter 2Prajyot ShendageNoch keine Bewertungen
- 2ND Week Law of AccelerationDokument5 Seiten2ND Week Law of AccelerationMira VeranoNoch keine Bewertungen
- Intro ECSDokument12 SeitenIntro ECSAbdul Hadi MustafaNoch keine Bewertungen
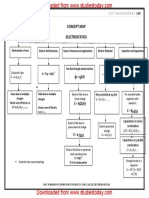
- CBSE Class 12 Physics Electrostatics Concept MapDokument1 SeiteCBSE Class 12 Physics Electrostatics Concept MapAbdullah MahmoodNoch keine Bewertungen
- Syllabus For Che3200Dokument5 SeitenSyllabus For Che3200ssavage03Noch keine Bewertungen
- Scribd Bypass Download LimitDokument16 SeitenScribd Bypass Download LimitMofasa ENoch keine Bewertungen
- DIN EN 12697-26-2012 (Eng)Dokument52 SeitenDIN EN 12697-26-2012 (Eng)gfjdgh fdfg100% (1)
- Assignment Fall2018Dokument2 SeitenAssignment Fall2018Frans LoekitoNoch keine Bewertungen
- Fluid Machines.: Mr. Sayan Das. Teaching Assistant. Department of Mechanical EngineeringDokument11 SeitenFluid Machines.: Mr. Sayan Das. Teaching Assistant. Department of Mechanical EngineeringAnonymous 2BJgxbxJNoch keine Bewertungen
- 03 Rigid Body BasicDokument24 Seiten03 Rigid Body BasicRithish BarathNoch keine Bewertungen
- D Alemberts PrincipleDokument16 SeitenD Alemberts PrincipleB.ARVIND B.ARVINDNoch keine Bewertungen
- Newton's Laws: Physics Lab ReportDokument14 SeitenNewton's Laws: Physics Lab Reportapi-305471506Noch keine Bewertungen
- Basic Barcelona Model - Géotechnique40 AlonsoDokument26 SeitenBasic Barcelona Model - Géotechnique40 AlonsoYorch FirstoneNoch keine Bewertungen
- Lecture - 3-The Second Law of Thermodynamics and EntropyDokument16 SeitenLecture - 3-The Second Law of Thermodynamics and EntropyahmedNoch keine Bewertungen
- A Brief Survey of Stochastic Electrodynamics: Timothy H. BoyerDokument15 SeitenA Brief Survey of Stochastic Electrodynamics: Timothy H. BoyerSimon SavittNoch keine Bewertungen
- Exp-1-5-Ph-1001 - Manual-Before MidDokument23 SeitenExp-1-5-Ph-1001 - Manual-Before MidMohsin TariqNoch keine Bewertungen
- Statics - Vector of ForceDokument7 SeitenStatics - Vector of ForceEuw ChaiwanontNoch keine Bewertungen
- Sciencedirect: 13Th Cota International Conference of Transportation Professionals (Cictp 2013)Dokument11 SeitenSciencedirect: 13Th Cota International Conference of Transportation Professionals (Cictp 2013)Darko LakicNoch keine Bewertungen
- Dynamics of Machine ManualDokument16 SeitenDynamics of Machine ManualDevangMarvaniaNoch keine Bewertungen
- ME 352 - Introduction and Basic ConceptsDokument22 SeitenME 352 - Introduction and Basic ConceptsDurjoyNoch keine Bewertungen
- Theory of The Nuclear Shell ModelDokument1 SeiteTheory of The Nuclear Shell ModelRedhabAbbassNoch keine Bewertungen
- Chapter 15 - Fluid Mechanics: Thursday, March 24Dokument19 SeitenChapter 15 - Fluid Mechanics: Thursday, March 24CyberR.DomingoNoch keine Bewertungen
- Impact of Jet PDFDokument32 SeitenImpact of Jet PDFHari PrakashNoch keine Bewertungen
- P5643 Projectile Launcher: Mechatronics Term ProjectDokument19 SeitenP5643 Projectile Launcher: Mechatronics Term ProjectRenz MaguilaNoch keine Bewertungen