Das könnte Ihnen auch gefallen
- Power Converters and Control of Renewable Energy Systems DADokument52 SeitenPower Converters and Control of Renewable Energy Systems DAaliNoch keine Bewertungen
- D S Henderson Napier University, UK.: Variable Speed Electric Drives - Characteristics and ApplicationsDokument8 SeitenD S Henderson Napier University, UK.: Variable Speed Electric Drives - Characteristics and ApplicationsscrsanNoch keine Bewertungen
- Improving-Variable-Speed-Pumping-Control ASHRAE ArticleDokument8 SeitenImproving-Variable-Speed-Pumping-Control ASHRAE Articlejohnb1978Noch keine Bewertungen
- NEW Final Report 3rd Sem DFIGDokument61 SeitenNEW Final Report 3rd Sem DFIGSiva ForeviewNoch keine Bewertungen
- Energy Efficient Hydraulic and Regenerative Cap - SICFP - 2005 - K-E RydbergDokument13 SeitenEnergy Efficient Hydraulic and Regenerative Cap - SICFP - 2005 - K-E RydbergNemoz ZrNoch keine Bewertungen
- A 1:1 Prototype of Power Generation System Based Upon Cross-Flow Water TurbinesDokument5 SeitenA 1:1 Prototype of Power Generation System Based Upon Cross-Flow Water TurbinesSantiago GNoch keine Bewertungen
- A Simple Flywheel Induction Motor For Large Power Short Time Compensation in Inverter-Driven Stand-Alone Power SystemsDokument7 SeitenA Simple Flywheel Induction Motor For Large Power Short Time Compensation in Inverter-Driven Stand-Alone Power SystemstalatsonNoch keine Bewertungen
- Advanced Fuzzy Power Extraction Control of Wind Energy Conversion System For Power Quality Improvement in A Grid Tied Hybrid Generation SystemDokument11 SeitenAdvanced Fuzzy Power Extraction Control of Wind Energy Conversion System For Power Quality Improvement in A Grid Tied Hybrid Generation SystemChristian JimenezNoch keine Bewertungen
- Design and Simulation of MPPT Algorithm For Three Phase Induction Motor Solar Water PumpDokument4 SeitenDesign and Simulation of MPPT Algorithm For Three Phase Induction Motor Solar Water PumpEditor IJTSRDNoch keine Bewertungen
- Analysis of Grid-Connected PV-Wind-Battery Based Multi-Input Transformer Coupled Bidirectional DC-DC ConverterDokument10 SeitenAnalysis of Grid-Connected PV-Wind-Battery Based Multi-Input Transformer Coupled Bidirectional DC-DC ConverterMagpie 2023Noch keine Bewertungen
- Automatic Load Frequency ControlDokument54 SeitenAutomatic Load Frequency ControlRam YadavNoch keine Bewertungen
- Modeling and Analysis of Canal Type Small Hydro PoDokument10 SeitenModeling and Analysis of Canal Type Small Hydro PoJavier Conesa OutedaNoch keine Bewertungen
- Energy Efficient Hydraulic Systems and Regenerative CapabilitiesDokument13 SeitenEnergy Efficient Hydraulic Systems and Regenerative Capabilitiesn3tr0xNoch keine Bewertungen
- One-Power-Point Operation For Variable Speed Wind/ Tidal Stream Turbines With Synchronous GeneratorsDokument10 SeitenOne-Power-Point Operation For Variable Speed Wind/ Tidal Stream Turbines With Synchronous GeneratorsHuibin ZhangNoch keine Bewertungen
- Shymgen System - Optimizing The Performance of Shaft Generator and Drive Train On Fishing VesselsDokument6 SeitenShymgen System - Optimizing The Performance of Shaft Generator and Drive Train On Fishing VesselsADRIANSF1Noch keine Bewertungen
- Conf 1Dokument5 SeitenConf 1sujithadharani9813Noch keine Bewertungen
- Study of The Centrifugal Pump Efficiency at Throttling and Speed ControlDokument4 SeitenStudy of The Centrifugal Pump Efficiency at Throttling and Speed ControlHassan SouleymanNoch keine Bewertungen
- APPLICATION OF MATRIX CONVERTER IN WIND PMSGDokument8 SeitenAPPLICATION OF MATRIX CONVERTER IN WIND PMSGChetan GhatageNoch keine Bewertungen
- Voltage Stability Enhancement of Wind Energy Conversion System Using SVPWM ControllerDokument13 SeitenVoltage Stability Enhancement of Wind Energy Conversion System Using SVPWM ControllerpremsonyNoch keine Bewertungen
- Beltran 2012Dokument9 SeitenBeltran 2012hamza gaNoch keine Bewertungen
- Review Article: An Overview of Power Electronics Applications in Fuel Cell Systems: DC and AC ConvertersDokument10 SeitenReview Article: An Overview of Power Electronics Applications in Fuel Cell Systems: DC and AC ConvertersBhalchandra InamdarNoch keine Bewertungen
- RésumésDokument12 SeitenRésumésThéo ManièreNoch keine Bewertungen
- Design and Implementation of Hybrid Energy Storage System ......Dokument8 SeitenDesign and Implementation of Hybrid Energy Storage System ......GALLEGO LUPIANEZNoch keine Bewertungen
- ElectricalDokument15 SeitenElectricalVictor RamonNoch keine Bewertungen
- ExcavatorEnergy savingEfficiencyBasedonDieselEngineDokument9 SeitenExcavatorEnergy savingEfficiencyBasedonDieselEngineyusufNoch keine Bewertungen
- A High-Efficiency Flyback Micro-Inverter With A New Adaptive Snubber For Photovoltaic ApplicationsDokument10 SeitenA High-Efficiency Flyback Micro-Inverter With A New Adaptive Snubber For Photovoltaic ApplicationskalaiNoch keine Bewertungen
- Simulation and Experimental Analysis of Hybrid DC-DC Converter For Electric Vehicle ApplicationsDokument10 SeitenSimulation and Experimental Analysis of Hybrid DC-DC Converter For Electric Vehicle ApplicationspremsonyNoch keine Bewertungen
- 1.1 Problem BackgroundDokument29 Seiten1.1 Problem BackgroundSabari RajanNoch keine Bewertungen
- 6b4f PDFDokument12 Seiten6b4f PDFGanesh RNoch keine Bewertungen
- Rajaei 2010Dokument19 SeitenRajaei 2010gerson gomesNoch keine Bewertungen
- RDokument8 SeitenRhamza gaNoch keine Bewertungen
- Actuators 10 00001 v2Dokument16 SeitenActuators 10 00001 v2Amirul WiyatnoNoch keine Bewertungen
- Efficiency Analysis and Evaluation of Energy Saving Press 2014 Automation inDokument7 SeitenEfficiency Analysis and Evaluation of Energy Saving Press 2014 Automation inJoseph JoseNoch keine Bewertungen
- Application of A Matrix Converter For PMSG Wind Turbine Generation SystemDokument5 SeitenApplication of A Matrix Converter For PMSG Wind Turbine Generation SystemChetan GhatageNoch keine Bewertungen
- Energies 14 05949 v2Dokument15 SeitenEnergies 14 05949 v2msaddamiqbalNoch keine Bewertungen
- 1 s2.0 S1359431115012430 MainDokument8 Seiten1 s2.0 S1359431115012430 Main20me91r01Noch keine Bewertungen
- Optimal PDFDokument6 SeitenOptimal PDFjalilemadiNoch keine Bewertungen
- A Novel Step-Up Multi-Input DC-DC Converter For Hybrid Electric Vehicles ApplicationDokument11 SeitenA Novel Step-Up Multi-Input DC-DC Converter For Hybrid Electric Vehicles ApplicationAra AkramNoch keine Bewertungen
- Grid Integration of PMSG Based Wind Energy Conversion With Battery Storage SystemDokument10 SeitenGrid Integration of PMSG Based Wind Energy Conversion With Battery Storage SystemRahul KumarNoch keine Bewertungen
- Simulation of A Prototype Electrically Powered Integrated Actuator For Civil AircraftDokument14 SeitenSimulation of A Prototype Electrically Powered Integrated Actuator For Civil AircraftdavpaffNoch keine Bewertungen
- 1 s2.0 S0045790608000906 MainDokument14 Seiten1 s2.0 S0045790608000906 MainKaderNoch keine Bewertungen
- Paper 15Dokument13 SeitenPaper 15RakeshconclaveNoch keine Bewertungen
- A Low Cost Flyback CCM Inverter For AC Module ApplicationDokument9 SeitenA Low Cost Flyback CCM Inverter For AC Module Applicationvinay kumarNoch keine Bewertungen
- A Higher Level of Efficiency: Five-Level Frequency Converters For Medium VoltageDokument6 SeitenA Higher Level of Efficiency: Five-Level Frequency Converters For Medium VoltageBalaji MbNoch keine Bewertungen
- 1 s2.0 S2352484722012471 Main PDFDokument19 Seiten1 s2.0 S2352484722012471 Main PDFRola AfifyNoch keine Bewertungen
- Electrical Power and Energy Systems: Vahid Samavatian, Ahmad RadanDokument9 SeitenElectrical Power and Energy Systems: Vahid Samavatian, Ahmad RadanariphineNoch keine Bewertungen
- Performance Improvement of The Axial Self-Rectifying Impulse Air-TurbineDokument16 SeitenPerformance Improvement of The Axial Self-Rectifying Impulse Air-TurbinePisindu DanushaNoch keine Bewertungen
- Energy Efficiency of Pneumatic Power Take-Off For Wave Energy ConverterDokument32 SeitenEnergy Efficiency of Pneumatic Power Take-Off For Wave Energy ConverterArbanas IvanNoch keine Bewertungen
- SPL: 25447 Simplified Computer-Aided Analysis of Electrical Current in Motors Used For Beam Pumping SystemsDokument14 SeitenSPL: 25447 Simplified Computer-Aided Analysis of Electrical Current in Motors Used For Beam Pumping SystemsJosé TimanáNoch keine Bewertungen
- Minimum Time Current Controller Design For Two-Interleaved Bidirectional Converter: Application To Hybrid Fuel Cell/supercapacitor VehiclesDokument13 SeitenMinimum Time Current Controller Design For Two-Interleaved Bidirectional Converter: Application To Hybrid Fuel Cell/supercapacitor VehiclesariphineNoch keine Bewertungen
- Energy Conversion and Management: Riccardo Amirante, Elia Distaso, Paolo TamburranoDokument12 SeitenEnergy Conversion and Management: Riccardo Amirante, Elia Distaso, Paolo TamburranobrgrNoch keine Bewertungen
- Energy Recovery From Landing AircraftDokument8 SeitenEnergy Recovery From Landing AircraftRaniero FalzonNoch keine Bewertungen
- Efficiency Optimization Method For Cascaded Two-Stage Boost ConverterDokument11 SeitenEfficiency Optimization Method For Cascaded Two-Stage Boost ConverterragulkumarNoch keine Bewertungen
- Wing MilDokument7 SeitenWing MilAkash AkuNoch keine Bewertungen
- 19.wind Power SystemDokument4 Seiten19.wind Power SystemSanthosh KumarNoch keine Bewertungen
- A Master-Slave Fuzzy Logic Control SchemeDokument6 SeitenA Master-Slave Fuzzy Logic Control SchemeFatih BurakNoch keine Bewertungen
- Performance Comparison of Active Rectifier Control Schemes in More Electric Aircraft ApplicationsDokument10 SeitenPerformance Comparison of Active Rectifier Control Schemes in More Electric Aircraft ApplicationsBadal PatnaikNoch keine Bewertungen
- Márquez J.L., Molina M.G., Pacas J.MDokument6 SeitenMárquez J.L., Molina M.G., Pacas J.Mlalita pargaiNoch keine Bewertungen
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsVon EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsBewertung: 3.5 von 5 Sternen3.5/5 (3)
- PID Controls:: Hydraulic Design Game ChangerDokument36 SeitenPID Controls:: Hydraulic Design Game ChangerJoseph JoseNoch keine Bewertungen
- An Engineer's Guide To Selecting A Pressure Relief Valve (Updated 3.3.21)Dokument17 SeitenAn Engineer's Guide To Selecting A Pressure Relief Valve (Updated 3.3.21)Joseph JoseNoch keine Bewertungen
- Increase Safety and Operator Comfort With A Multiaxis-Steer™ SystemDokument2 SeitenIncrease Safety and Operator Comfort With A Multiaxis-Steer™ SystemJoseph JoseNoch keine Bewertungen
- (8fa78947 8a77 4f78 92b2 Ec10dea873c7) Asset1R CANBus Overview FinalDokument4 Seiten(8fa78947 8a77 4f78 92b2 Ec10dea873c7) Asset1R CANBus Overview FinalJoseph JoseNoch keine Bewertungen
- NOSHOK Pressure Switches White PaperDokument6 SeitenNOSHOK Pressure Switches White PaperJoseph JoseNoch keine Bewertungen
- Hose Reliability Isn'T A: StretchDokument38 SeitenHose Reliability Isn'T A: StretchJoseph JoseNoch keine Bewertungen
- (97c1efe3 Be1b 4bec 9308 D1d9eacf9024) PS20022 Thermal ManagementDokument2 Seiten(97c1efe3 Be1b 4bec 9308 D1d9eacf9024) PS20022 Thermal ManagementJoseph JoseNoch keine Bewertungen
- 5 Ways You Can Optimize Work Function Performance On Your Compact Wheel LoaderDokument2 Seiten5 Ways You Can Optimize Work Function Performance On Your Compact Wheel LoaderJoseph JoseNoch keine Bewertungen
- The Comparison of Optimizing SVM by GA and Grid SearchDokument7 SeitenThe Comparison of Optimizing SVM by GA and Grid SearchJoseph JoseNoch keine Bewertungen
- The Comparison of Optimizing SVM by GA and Grid SearchDokument7 SeitenThe Comparison of Optimizing SVM by GA and Grid SearchJoseph JoseNoch keine Bewertungen
- Neurocomputing: Yukun Bao, Zhongyi Hu, Tao XiongDokument9 SeitenNeurocomputing: Yukun Bao, Zhongyi Hu, Tao XiongJoseph JoseNoch keine Bewertungen
- SVM Parameter Optimization Using Grid Search and GDokument8 SeitenSVM Parameter Optimization Using Grid Search and GJoseph JoseNoch keine Bewertungen
- Multi-Classification by Using Tri-Class SVMDokument13 SeitenMulti-Classification by Using Tri-Class SVMJoseph JoseNoch keine Bewertungen
- Event Based Control and Signal Processing Embedded SystemsDokument573 SeitenEvent Based Control and Signal Processing Embedded SystemsRobson Cruz100% (1)
- Event-Driven Data Acquisition and Digital Signal Processing-A TutorialDokument5 SeitenEvent-Driven Data Acquisition and Digital Signal Processing-A TutorialJoseph JoseNoch keine Bewertungen
- Fault Classification of Uid Power Systems Using A Dynamics Feature Extraction Technique and Neural NetworksDokument11 SeitenFault Classification of Uid Power Systems Using A Dynamics Feature Extraction Technique and Neural NetworksJoseph JoseNoch keine Bewertungen
- Machines 05 00021 v3 PDFDokument28 SeitenMachines 05 00021 v3 PDFAuditio MandhanyNoch keine Bewertungen
- Extracting Features From Time Series DataDokument16 SeitenExtracting Features From Time Series DataJoseph JoseNoch keine Bewertungen
- Feature Selection Via Sensitivity Analysis of SVM Probabilistic OutputsDokument20 SeitenFeature Selection Via Sensitivity Analysis of SVM Probabilistic OutputsJoseph JoseNoch keine Bewertungen
- Sensors: Event-Based Feature Extraction Using Adaptive Selection ThresholdsDokument24 SeitenSensors: Event-Based Feature Extraction Using Adaptive Selection ThresholdsJoseph JoseNoch keine Bewertungen
- Fault Classification of Uid Power Systems Using A Dynamics Feature Extraction Technique and Neural NetworksDokument11 SeitenFault Classification of Uid Power Systems Using A Dynamics Feature Extraction Technique and Neural NetworksJoseph JoseNoch keine Bewertungen
- 10 1016@j Isatra 2019 11 006Dokument32 Seiten10 1016@j Isatra 2019 11 006Joseph JoseNoch keine Bewertungen
- Mechanical Systems and Signal Processing: Wei Li, Zhencai Zhu, Fan Jiang, Gongbo Zhou, Guoan ChenDokument13 SeitenMechanical Systems and Signal Processing: Wei Li, Zhencai Zhu, Fan Jiang, Gongbo Zhou, Guoan ChenJoseph JoseNoch keine Bewertungen
- 2019 Book PDFDokument218 Seiten2019 Book PDFPaco Villalobos VillegasNoch keine Bewertungen
- Pattern Recognition and AI Using Matlab Textbook PDFDokument263 SeitenPattern Recognition and AI Using Matlab Textbook PDFJoseph JoseNoch keine Bewertungen
- IMECE2003-41457: Multi Criteria Design Optimization of Backhoe Loader Front MechanismDokument7 SeitenIMECE2003-41457: Multi Criteria Design Optimization of Backhoe Loader Front MechanismJoseph JoseNoch keine Bewertungen
- Featsel PDFDokument7 SeitenFeatsel PDFKerry SungNoch keine Bewertungen
- Feature Selection For SVMS: by J. Weston, S. Mukherjee, O. Chapelle, M. Pontil, T. Poggio, V. VapnikDokument19 SeitenFeature Selection For SVMS: by J. Weston, S. Mukherjee, O. Chapelle, M. Pontil, T. Poggio, V. VapnikJoseph JoseNoch keine Bewertungen
- Feedback Linearisation Applied On A Hydraulic ServDokument7 SeitenFeedback Linearisation Applied On A Hydraulic ServJoseph JoseNoch keine Bewertungen
- Catalogo ISKRA 2008Dokument23 SeitenCatalogo ISKRA 2008manuelNoch keine Bewertungen
- VacconPartsManual PDFDokument383 SeitenVacconPartsManual PDFJhon Sanabria100% (2)
- Prince Hydraulics - LVS Loader Valve Offered by PRC Industrial SupplyDokument6 SeitenPrince Hydraulics - LVS Loader Valve Offered by PRC Industrial SupplyPRC Industrial Supply100% (1)
- Car Parking System E CatalogueDokument7 SeitenCar Parking System E CatalogueAbdullah AhamedNoch keine Bewertungen
- Parth Valves and Hoses LLP.: Test & Guarantee CertificateDokument1 SeiteParth Valves and Hoses LLP.: Test & Guarantee CertificateSURYAKANTNoch keine Bewertungen
- Service Training: The Audi 1.4l TFSI EngineDokument56 SeitenService Training: The Audi 1.4l TFSI EngineLuis Miguel Condori100% (1)
- TRX2319 Crane Escorts Parts BookDokument383 SeitenTRX2319 Crane Escorts Parts BookRaghavendra Mestha100% (5)
- MX48-MX60 Manual CRIBA SWECODokument200 SeitenMX48-MX60 Manual CRIBA SWECOArmando Salgado100% (1)
- Toaz - Info Nissan Navara Workshop Manual CL PRDokument22 SeitenToaz - Info Nissan Navara Workshop Manual CL PRCarlos Alberto Perez SepulvedaNoch keine Bewertungen
- Cummins Confidential: This Document (And The Information Shown Thereon) Is CONFIDENTIAL AND PROPRIETARYDokument1 SeiteCummins Confidential: This Document (And The Information Shown Thereon) Is CONFIDENTIAL AND PROPRIETARYibrahem100% (1)
- Output Ratings: Diesel Generator Set Exclusively From Your Cat DealerDokument4 SeitenOutput Ratings: Diesel Generator Set Exclusively From Your Cat Dealeryao nestorNoch keine Bewertungen
- Troll Luxiona Tarifa PVP 2015Dokument36 SeitenTroll Luxiona Tarifa PVP 2015VEMATELNoch keine Bewertungen
- Mi 1726 - D (Storage Procedure)Dokument16 SeitenMi 1726 - D (Storage Procedure)Weruzani MbeweNoch keine Bewertungen
- Tcs Model PaperDokument9 SeitenTcs Model PaperHariniReddyNoch keine Bewertungen
- Sport 200Dokument68 SeitenSport 200Lợi Bạc LiêuNoch keine Bewertungen
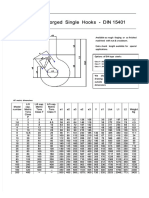
- Qdoc - Tips - Hook Din 15401Dokument1 SeiteQdoc - Tips - Hook Din 15401Alireza RahimiNoch keine Bewertungen
- Global: LinersDokument4 SeitenGlobal: LinersXuan Khanh maNoch keine Bewertungen
- The CF Engine Overview: Vehicle Engine Type Indication Performance Torque Emission Level Daf Cf65Dokument2 SeitenThe CF Engine Overview: Vehicle Engine Type Indication Performance Torque Emission Level Daf Cf65James Kuah100% (1)
- C4 New Range: CitroënDokument48 SeitenC4 New Range: CitroënGoChiLLeNoch keine Bewertungen
- Kinetic 020518 TBDokument15 SeitenKinetic 020518 TBCheema HnpsNoch keine Bewertungen
- MLG Sign LeakDokument6 SeitenMLG Sign Leakdongdangkhoa85Noch keine Bewertungen
- Datasheet LFU119XDokument2 SeitenDatasheet LFU119XMohammed Tausif AhmedNoch keine Bewertungen
- R1600G Load Haul Dump Operator Familiarization Student MaterialsDokument14 SeitenR1600G Load Haul Dump Operator Familiarization Student Materialspaul heberth areche conovilcaNoch keine Bewertungen
- CARRARO Transmission WSMDokument130 SeitenCARRARO Transmission WSMDavid Solis0% (1)
- Komatsu Pc800 800lc 8 Shop ManualDokument20 SeitenKomatsu Pc800 800lc 8 Shop Manualchelsea100% (51)
- 3576 Erbil MergedDokument4 Seiten3576 Erbil MergedAli AlahmaNoch keine Bewertungen
- List of Companies in MalaysiaDokument35 SeitenList of Companies in MalaysiaBoskkurr GamingNoch keine Bewertungen
- SCC550A: SANY Crawler Crane 55 Tons Lifting Capacity 55 Tons Lifting CapacityDokument17 SeitenSCC550A: SANY Crawler Crane 55 Tons Lifting Capacity 55 Tons Lifting CapacityTop MoversNoch keine Bewertungen
- 40XMH'11 40XW'11: (67TL) (67TK)Dokument50 Seiten40XMH'11 40XW'11: (67TL) (67TK)Carlos NetoNoch keine Bewertungen
- Presentation 7DCT300Dokument37 SeitenPresentation 7DCT300Mauricio Exequiel Chavez100% (1)