Das könnte Ihnen auch gefallen
- GPS For SurveyorsDokument14 SeitenGPS For SurveyorsChamara PrasannaNoch keine Bewertungen
- GNSS Positioning MethodsDokument21 SeitenGNSS Positioning MethodsFazelah YakubNoch keine Bewertungen
- GPS and Its Application in Hydrographic SurveyDokument12 SeitenGPS and Its Application in Hydrographic SurveyChetana Sharma100% (1)
- Topic 5 - Falak Syarie PDFDokument24 SeitenTopic 5 - Falak Syarie PDFAfif FarhanNoch keine Bewertungen
- PSM1 - Geoid Based Seamless Vertical Datum For Marine Cadastre ApplicationDokument26 SeitenPSM1 - Geoid Based Seamless Vertical Datum For Marine Cadastre ApplicationAmsyar AbdullahNoch keine Bewertungen
- Chapter 3 - FieldworkDokument73 SeitenChapter 3 - FieldworkNur Fatin Are Tien100% (1)
- Deformation SurveysDokument6 SeitenDeformation SurveysKristina NewtonNoch keine Bewertungen
- Traversing Project Report: GNSS, Total Station Mapping of University BuildingDokument11 SeitenTraversing Project Report: GNSS, Total Station Mapping of University BuildingManny SinghNoch keine Bewertungen
- Cg601 Geodesy 2 Topic 1Dokument53 SeitenCg601 Geodesy 2 Topic 1Lyana Zul100% (2)
- REPORTDokument33 SeitenREPORTMuhammad Zahid Zakwan Muhammad TakiyudinNoch keine Bewertungen
- ENGINEERING SURVEYING II: PRECISE LEVELLING FUNDAMENTALSDokument59 SeitenENGINEERING SURVEYING II: PRECISE LEVELLING FUNDAMENTALSnur ain amirahNoch keine Bewertungen
- Malaysia Geoid Model (MyGEOID)Dokument7 SeitenMalaysia Geoid Model (MyGEOID)mroys mroysNoch keine Bewertungen
- Introduction To Hydrographic Surveying: Topic: Definition of HydrographyDokument52 SeitenIntroduction To Hydrographic Surveying: Topic: Definition of HydrographyVictoria Jackson0% (1)
- Report HydrographyDokument15 SeitenReport HydrographyAfif AsyrafNoch keine Bewertungen
- SUG421 - Advanced Cadastral Survey (E-Cadastre and CCS)Dokument7 SeitenSUG421 - Advanced Cadastral Survey (E-Cadastre and CCS)mruzainimf89% (9)
- Datum and Geodetic Coordinate SystemDokument8 SeitenDatum and Geodetic Coordinate SystemPunesh SubramaniamNoch keine Bewertungen
- GEODESI Part1Dokument51 SeitenGEODESI Part1api-3700706100% (5)
- Guidelines MultibeamDokument9 SeitenGuidelines MultibeamDiego D. MantillaNoch keine Bewertungen
- 1.0 Introduction To Physical Geodesy (2012)Dokument50 Seiten1.0 Introduction To Physical Geodesy (2012)Qudratul Aisya75% (4)
- SUG613 GIS - Project ReportDokument10 SeitenSUG613 GIS - Project ReportSafwan IzzatyNoch keine Bewertungen
- Practical Handout Gls310Dokument12 SeitenPractical Handout Gls310syazwan mazlanNoch keine Bewertungen
- Magnet Field 1.1 - HelpDokument390 SeitenMagnet Field 1.1 - HelpAlfwil Apdiaz100% (1)
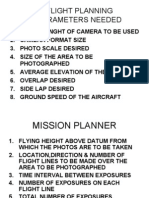
- Flight Planning & AP CalculationDokument17 SeitenFlight Planning & AP CalculationSaurabh Suman100% (1)
- Practical SUG241Dokument10 SeitenPractical SUG241nazlanz4funNoch keine Bewertungen
- Geometric Correction-Lab ReportDokument15 SeitenGeometric Correction-Lab ReportMOHD FARID BIN FAUZI100% (1)
- Microwave Remote SensingDokument41 SeitenMicrowave Remote SensingSaurabh SumanNoch keine Bewertungen
- C2005 Traverse SurveyDokument11 SeitenC2005 Traverse SurveyhjwNoch keine Bewertungen
- Sug558 Gls558 GPRDokument17 SeitenSug558 Gls558 GPRunianariszNoch keine Bewertungen
- Operation Manual (NTS-320 Series Total Station)Dokument140 SeitenOperation Manual (NTS-320 Series Total Station)Juan Manuel Cáceres GNoch keine Bewertungen
- Curve Alignment: Engineering Surveying 3 DCG40123Dokument10 SeitenCurve Alignment: Engineering Surveying 3 DCG40123Kãrthîk RãjãhNoch keine Bewertungen
- SUG514 - Hydrographic Surveying - Run Line Vs Cross Line CalculationDokument2 SeitenSUG514 - Hydrographic Surveying - Run Line Vs Cross Line Calculationmruzainimf100% (4)
- Control Survey Methods and Calculations in 40 CharactersDokument23 SeitenControl Survey Methods and Calculations in 40 CharactersSerinaaNoch keine Bewertungen
- Advanced Engineering Surveying Name: Date .Dokument17 SeitenAdvanced Engineering Surveying Name: Date .Nurul Najwa MohtarNoch keine Bewertungen
- Definition of Geodetic Surveying. PPTDokument17 SeitenDefinition of Geodetic Surveying. PPTAhmad SalimNoch keine Bewertungen
- Error EdmDokument22 SeitenError EdmFaizan FathizanNoch keine Bewertungen
- Angles, Azimuths, and BearingsDokument16 SeitenAngles, Azimuths, and BearingsAhmad KhaledNoch keine Bewertungen
- Report Lab 1Dokument25 SeitenReport Lab 1F1031 Hariz HilmiNoch keine Bewertungen
- Surveying Methodology Using GPR On Utilities Detection: Syahrul Fithry Senin Uitm Pulau PinangDokument28 SeitenSurveying Methodology Using GPR On Utilities Detection: Syahrul Fithry Senin Uitm Pulau Pinangshamsukarim2009Noch keine Bewertungen
- Setting Out Building FieldworkDokument18 SeitenSetting Out Building FieldworkMuhamad Ameenurrashid Ismail0% (2)
- Ukur KadasterDokument21 SeitenUkur KadasterMuhammad NajmiNoch keine Bewertungen
- 5 Hydrographic SurveyDokument29 Seiten5 Hydrographic Surveyscha_linaNoch keine Bewertungen
- Map Preparation Using QGISDokument59 SeitenMap Preparation Using QGISLokyshak MeenaNoch keine Bewertungen
- SUG532 - Advanced Geodesy Final ReportDokument13 SeitenSUG532 - Advanced Geodesy Final Reportmruzainimf67% (3)
- Cadastral Reference MarkDokument2 SeitenCadastral Reference MarkAizzat AzharNoch keine Bewertungen
- Interior Orientation Process in PhotogrammetryDokument37 SeitenInterior Orientation Process in PhotogrammetryNik AmirNoch keine Bewertungen
- Lab 3 - Locating Principal Points & Base LiningDokument23 SeitenLab 3 - Locating Principal Points & Base LiningNajmi Mohd AmirNoch keine Bewertungen
- ArcGIS Geostatistical Analyst ExercisesDokument7 SeitenArcGIS Geostatistical Analyst ExercisesMohd Akmal RazakNoch keine Bewertungen
- SUG514 - Hydrographic Surveying - Topo Map Vs Navigation Chart, ENC & ECDISDokument30 SeitenSUG514 - Hydrographic Surveying - Topo Map Vs Navigation Chart, ENC & ECDISmruzainimf83% (12)
- Hydrographic SurveyingDokument62 SeitenHydrographic SurveyingSridhar Natarajan100% (1)
- Azimuth Observations of the SunDokument1 SeiteAzimuth Observations of the SunAida Azhari100% (1)
- SUG596 - Field Scheme II (Engineering Survey)Dokument60 SeitenSUG596 - Field Scheme II (Engineering Survey)mruzainimf90% (10)
- Geometric Geodesy Geometric GeodesyDokument10 SeitenGeometric Geodesy Geometric GeodesyKismet100% (1)
- Possibilities of TlsDokument10 SeitenPossibilities of TlsdrummingstickNoch keine Bewertungen
- Basic SurveyingDokument6 SeitenBasic Surveyingervikas34Noch keine Bewertungen
- Edm ErrorDokument14 SeitenEdm ErrorFaizan FathizanNoch keine Bewertungen
- Manual Using CDSDokument223 SeitenManual Using CDSJAMES RITCHIE ANAK ROGERNoch keine Bewertungen
- Traversing and Traverse AdjustmentsDokument23 SeitenTraversing and Traverse AdjustmentsJajang NurjamanNoch keine Bewertungen
- Work Execution PlanDokument12 SeitenWork Execution PlanPaul OkeNoch keine Bewertungen
- Positioning Techniques For Offshore SurveyingDokument54 SeitenPositioning Techniques For Offshore Surveyingjohariak100% (1)
- Lecture 3 - Data Capturing Techniques - Total Station and GPSDokument26 SeitenLecture 3 - Data Capturing Techniques - Total Station and GPSCisco ManNoch keine Bewertungen
- DCG2043 ENGİNEERING SURVEYING IDokument12 SeitenDCG2043 ENGİNEERING SURVEYING IAqilah TaufikNoch keine Bewertungen
- DCG2052 CartographyDokument8 SeitenDCG2052 CartographyAqilah Taufik100% (1)
- Highway and Traffic Engineering Jun2019Dokument16 SeitenHighway and Traffic Engineering Jun2019Aqilah TaufikNoch keine Bewertungen
- DCG3092 Land Laws and RegulationsDokument12 SeitenDCG3092 Land Laws and RegulationsAqilah TaufikNoch keine Bewertungen
- DCG3073 Cadastral Surveying 1Dokument16 SeitenDCG3073 Cadastral Surveying 1Aqilah TaufikNoch keine Bewertungen
- Surveying Computation Jun2019Dokument10 SeitenSurveying Computation Jun2019Aqilah TaufikNoch keine Bewertungen
- Photogrammetry Jun2019Dokument12 SeitenPhotogrammetry Jun2019Aqilah TaufikNoch keine Bewertungen
- DCG2063 Field AstronomyDokument8 SeitenDCG2063 Field AstronomyAqilah TaufikNoch keine Bewertungen
- DCG6192 Sürvey AdjustmentDokument12 SeitenDCG6192 Sürvey AdjustmentAqilah TaufikNoch keine Bewertungen
- DCG6183 Georaphical Informati̇on System (Gis)Dokument8 SeitenDCG6183 Georaphical Informati̇on System (Gis)Aqilah TaufikNoch keine Bewertungen
- DCG2043 ENGİNEERING SURVEYING IDokument12 SeitenDCG2043 ENGİNEERING SURVEYING IAqilah TaufikNoch keine Bewertungen
- DCG2052 CartographyDokument8 SeitenDCG2052 CartographyAqilah Taufik100% (1)
- Pengenalan Remote SensingDokument27 SeitenPengenalan Remote SensingAqilah Taufik100% (1)
- Materi IC Bahasa Inggris 2018Dokument45 SeitenMateri IC Bahasa Inggris 2018kameliaNoch keine Bewertungen
- Movement of The EarthDokument21 SeitenMovement of The EarthAqilah Taufik100% (1)
- Topo PlanDokument1 SeiteTopo PlanAqilah TaufikNoch keine Bewertungen
- Malaysia Maririm ZoneDokument2 SeitenMalaysia Maririm ZoneAqilah TaufikNoch keine Bewertungen
- Detecting Seasonal Crop Abandonment Using Landsat ImageryDokument9 SeitenDetecting Seasonal Crop Abandonment Using Landsat ImageryAqilah TaufikNoch keine Bewertungen
- ECZEMA Type Discoid and DyshidroticDokument9 SeitenECZEMA Type Discoid and DyshidroticAqilah TaufikNoch keine Bewertungen
- Topic 1 Intro Remote SensingDokument16 SeitenTopic 1 Intro Remote SensingAqilah TaufikNoch keine Bewertungen
- Article For Application of Remote SensingDokument18 SeitenArticle For Application of Remote SensingAqilah TaufikNoch keine Bewertungen
- DCG 5243 Levelling Form TemplateDokument2 SeitenDCG 5243 Levelling Form TemplateAqilah Taufik100% (1)
- Borang H533Dokument1 SeiteBorang H533azmirNoch keine Bewertungen
- Curve RangingDokument10 SeitenCurve RangingAqilah Taufik100% (1)
- DCG 5243: Engineering Surveying 3 Levelling FormDokument1 SeiteDCG 5243: Engineering Surveying 3 Levelling FormAqilah TaufikNoch keine Bewertungen
- Bearings - Advanced - 1Dokument4 SeitenBearings - Advanced - 1Aqilah TaufikNoch keine Bewertungen
- sc4.3 Electricity Magnetism JeopardyDokument53 Seitensc4.3 Electricity Magnetism JeopardyPierre-jai LakeNoch keine Bewertungen
- Fiorentini Series C Rotary Meter Offers High Accuracy and RangeabilityDokument8 SeitenFiorentini Series C Rotary Meter Offers High Accuracy and RangeabilityuceskaNoch keine Bewertungen
- The Design of Transmission Line Support Foundations. An OverviewDokument5 SeitenThe Design of Transmission Line Support Foundations. An OverviewPablo Gustavo DavelozeNoch keine Bewertungen
- The Weather and The Seasons 53858Dokument2 SeitenThe Weather and The Seasons 53858Aftiniei IulianNoch keine Bewertungen
- Aluminum A413Dokument2 SeitenAluminum A413Fabio Miguel RodriguesNoch keine Bewertungen
- PHY2 Chapter 23 Gauss LawDokument29 SeitenPHY2 Chapter 23 Gauss LawChiến PhạmNoch keine Bewertungen
- The Scholar's Academy: Long QuestionsDokument4 SeitenThe Scholar's Academy: Long Questionspaggal janNoch keine Bewertungen
- Basic GreaseDokument20 SeitenBasic Greasefahreez100% (3)
- Quarterly Miller Welding Machine MaintenanceDokument3 SeitenQuarterly Miller Welding Machine MaintenanceMuhammad RosihanNoch keine Bewertungen
- Stone Column - LectureDokument52 SeitenStone Column - LecturePratik ParekhNoch keine Bewertungen
- MEMS (Micro-Electro-Mechanical System) TECHNOLOGYDokument25 SeitenMEMS (Micro-Electro-Mechanical System) TECHNOLOGYMonika PanghalNoch keine Bewertungen
- 12 PLAXISBulletinDokument24 Seiten12 PLAXISBulletinMark ChanNoch keine Bewertungen
- Heat Input Effects in WeldingDokument34 SeitenHeat Input Effects in WeldingMohammed SulemanNoch keine Bewertungen
- Ejercicio 7.45: Ing. Juan Diego Regalado MartiínezDokument10 SeitenEjercicio 7.45: Ing. Juan Diego Regalado MartiínezTzuliber RomeroNoch keine Bewertungen
- Final Internship ReportDokument54 SeitenFinal Internship ReportRaju Subedi71% (7)
- Addis Ababa Science and Technology University Collage of Electrical and Mechanical Engineering Department of Electrical and Computer EngineeringDokument6 SeitenAddis Ababa Science and Technology University Collage of Electrical and Mechanical Engineering Department of Electrical and Computer EngineeringABENEZER EPHREMNoch keine Bewertungen
- Spisok e Books 04 09 2014-2Dokument162 SeitenSpisok e Books 04 09 2014-2TimNoch keine Bewertungen
- C 158 Â " 95 R00 QZE1OC1SRUQDokument12 SeitenC 158 Â " 95 R00 QZE1OC1SRUQCesar PazNoch keine Bewertungen
- Chapter 02Dokument199 SeitenChapter 02351brendan83% (6)
- EN 1991-1-4:2005 (E) Eurocode 1: Actions On Structures Part 1-4: General Actions - Wind ActionsDokument18 SeitenEN 1991-1-4:2005 (E) Eurocode 1: Actions On Structures Part 1-4: General Actions - Wind ActionsManuel ValenteNoch keine Bewertungen
- Biology Form 4 Paper 3 Marking SchemeDokument7 SeitenBiology Form 4 Paper 3 Marking SchemeLAUEELANGNoch keine Bewertungen
- Auditorium case study reveals sound absorption strategiesDokument16 SeitenAuditorium case study reveals sound absorption strategiesAshi Chandak0% (1)
- Numerical Calculation of Psychrometric Properties On A CalculatorDokument5 SeitenNumerical Calculation of Psychrometric Properties On A CalculatorBetoAdauta100% (1)
- Interview Questions: Collected From Interviews of Engro/ FFC/ FatimaDokument10 SeitenInterview Questions: Collected From Interviews of Engro/ FFC/ Fatimaopeb tt100% (1)
- 01 Chap 1 ChemF4 Bil 2018 (CSY3p) PDFDokument20 Seiten01 Chap 1 ChemF4 Bil 2018 (CSY3p) PDFalanislnNoch keine Bewertungen
- CHAPTER 4 Introduction To ChromatographyDokument62 SeitenCHAPTER 4 Introduction To ChromatographyfieyaNoch keine Bewertungen
- Radiation Heat Transfer Mathcad SolutionsDokument176 SeitenRadiation Heat Transfer Mathcad SolutionsThebe HanyaneNoch keine Bewertungen
- BR HighFlowDokument4 SeitenBR HighFlowRocky SarmientoNoch keine Bewertungen
- Skoda Apprenticeship ProgramDokument4 SeitenSkoda Apprenticeship Programnauval.archNoch keine Bewertungen
- Paulo Correa and Alexandra Correa - Experimental Aetherometry Volume IIA IntroductionDokument9 SeitenPaulo Correa and Alexandra Correa - Experimental Aetherometry Volume IIA IntroductionSonyRed100% (1)