Das könnte Ihnen auch gefallen
- OpenPlant Modeler EssentialsDokument172 SeitenOpenPlant Modeler EssentialsEmiliano Amadei100% (1)
- HardwareDokument26 SeitenHardwareMaria Geovanna CavalcanteNoch keine Bewertungen
- Document - Onl - Desenho Andaime Fachada PDFDokument1 SeiteDocument - Onl - Desenho Andaime Fachada PDFLuisaNoch keine Bewertungen
- Prova JAVA - EstácioDokument3 SeitenProva JAVA - EstácioIgreja Batista de Limoeiro75% (4)
- Tutorial App InventorDokument26 SeitenTutorial App InventorEdson VerdeNoch keine Bewertungen
- Leccion de Python23Dokument260 SeitenLeccion de Python23abima385elNoch keine Bewertungen
- JNCIA Junos - JN - 102Dokument33 SeitenJNCIA Junos - JN - 102Juliano MarcioNoch keine Bewertungen
- ACQA - CircuitosEletricosIII - 1 AVALIAÇÃO CONTINUADADokument2 SeitenACQA - CircuitosEletricosIII - 1 AVALIAÇÃO CONTINUADALuma W. OliveiraNoch keine Bewertungen
- LP - Exerciciolab1Dokument2 SeitenLP - Exerciciolab1Luma W. OliveiraNoch keine Bewertungen
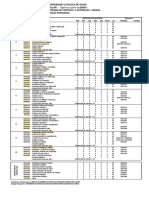
- Matriz Curricular PUCGODokument1 SeiteMatriz Curricular PUCGOLuma W. OliveiraNoch keine Bewertungen
- Introdução A ProgramaçãoDokument3 SeitenIntrodução A ProgramaçãoLuma W. OliveiraNoch keine Bewertungen
- Atividades RepeticaoDokument1 SeiteAtividades RepeticaoLuma W. OliveiraNoch keine Bewertungen
- Arte DigitalDokument28 SeitenArte DigitalAlexandre Dlou100% (1)
- Resumo4 0Dokument5 SeitenResumo4 0BEIJAMIN ARROLANoch keine Bewertungen
- Apostila Autodesk Inventor 2015Dokument839 SeitenApostila Autodesk Inventor 2015Paulo CesarNoch keine Bewertungen
- Teste de Bobinas em Sistema de Mesa Rotativa - H5-NPCDokument1 SeiteTeste de Bobinas em Sistema de Mesa Rotativa - H5-NPCHipot ServiceNoch keine Bewertungen
- Pinaculo Instalação Configuração e Utilização WebDokument10 SeitenPinaculo Instalação Configuração e Utilização Webincrivelmonstroverde cabeludoNoch keine Bewertungen
- Office IIDokument116 SeitenOffice IIpausujo100% (1)
- Rsync ManualDokument9 SeitenRsync ManualDilamar JrNoch keine Bewertungen
- Mp5 Automotivo Full Touch 7 C Espelhamento Android e Camera de Re 12V 10369774Dokument2 SeitenMp5 Automotivo Full Touch 7 C Espelhamento Android e Camera de Re 12V 10369774Knocked Head GarageNoch keine Bewertungen
- Como Colocar GIF Na Foto de Perfil Do FacebookDokument5 SeitenComo Colocar GIF Na Foto de Perfil Do FacebookSpencer PaulNoch keine Bewertungen
- Introdução 5 Geração de ComputadorDokument8 SeitenIntrodução 5 Geração de ComputadorJosé MárioNoch keine Bewertungen
- 2019 BT GER 113 I Versões de Firmware para Central de Controle CSNET-WEBDokument2 Seiten2019 BT GER 113 I Versões de Firmware para Central de Controle CSNET-WEBAndré Luiz Fraga de OliveiraNoch keine Bewertungen
- 01-Manual Editor InstalaçãoDokument23 Seiten01-Manual Editor InstalaçãoJúnior Nonato AraujoNoch keine Bewertungen
- Aula 12Dokument28 SeitenAula 12Desenvolvimento SistemaNoch keine Bewertungen
- Simulado 1 - Computação em Nuvem e Web Service em LinuxDokument5 SeitenSimulado 1 - Computação em Nuvem e Web Service em LinuxMarinaldo AlencarNoch keine Bewertungen
- Manual Do Usuário OMRON CX ONE PDokument2 SeitenManual Do Usuário OMRON CX ONE PLeonardo CarlosNoch keine Bewertungen
- Internet Parte I E1655987715Dokument95 SeitenInternet Parte I E1655987715erica Assis TeixeiraNoch keine Bewertungen
- Teste de Conhecimentos Básicos para Shell Linux para Recrutamento e Seleção - Com RepostasDokument3 SeitenTeste de Conhecimentos Básicos para Shell Linux para Recrutamento e Seleção - Com RepostasSilvio CavalheiroNoch keine Bewertungen
- Letras para Imprimir PDFDokument26 SeitenLetras para Imprimir PDFeluniversitarioutpNoch keine Bewertungen
- Configuração Rodar Jogos Recalbox Batocera Retropie FuncionandoDokument4 SeitenConfiguração Rodar Jogos Recalbox Batocera Retropie FuncionandoRafaelNoch keine Bewertungen
- Eh UmDokument4 SeitenEh Umleu_Banderas8986Noch keine Bewertungen
- Atalhos - Microsoft PowerPoint 2013Dokument9 SeitenAtalhos - Microsoft PowerPoint 2013Jefferson RibeiroNoch keine Bewertungen
- Lista de Exercícios - Introdução À InformáticaDokument10 SeitenLista de Exercícios - Introdução À InformáticaFrancisco OziéNoch keine Bewertungen
- JavaDokument63 SeitenJavaricardodesouza440Noch keine Bewertungen