Das könnte Ihnen auch gefallen
- Jsce SF4Dokument4 SeitenJsce SF4Mehdi BakhshiNoch keine Bewertungen
- GT6R4A1Dokument39 SeitenGT6R4A1Mehdi BakhshiNoch keine Bewertungen
- WTC 2020 - Full Paper 4 (REM Lining) - 414 - FinalDokument8 SeitenWTC 2020 - Full Paper 4 (REM Lining) - 414 - FinalMehdi BakhshiNoch keine Bewertungen
- Guideline For Design of SFRCDokument65 SeitenGuideline For Design of SFRCscribdnikoNoch keine Bewertungen
- Conmsiderations On The Usual Methods of Tunnel Lining DesignDokument28 SeitenConmsiderations On The Usual Methods of Tunnel Lining DesignTony ChanNoch keine Bewertungen
- Jsce NL 05Dokument8 SeitenJsce NL 05Mehdi BakhshiNoch keine Bewertungen
- Tunnel Segment Gasket Design - Solutions and Innovations: Bakhshi, Mehdi and Nasri, VeryaDokument10 SeitenTunnel Segment Gasket Design - Solutions and Innovations: Bakhshi, Mehdi and Nasri, VeryaMehdi BakhshiNoch keine Bewertungen
- WTC 2020 - Full Paper 1 (ACI 533) - 402 - FinalDokument6 SeitenWTC 2020 - Full Paper 1 (ACI 533) - 402 - FinalMehdi BakhshiNoch keine Bewertungen
- Dot 25309 DS1Dokument251 SeitenDot 25309 DS1dongheep811Noch keine Bewertungen
- Deterioration of Concrete by The Oxidation of Sulphide Minerals in The AggregateDokument10 SeitenDeterioration of Concrete by The Oxidation of Sulphide Minerals in The AggregateMehdi BakhshiNoch keine Bewertungen
- Befib 2020-Id 144Dokument18 SeitenBefib 2020-Id 144Mehdi BakhshiNoch keine Bewertungen
- ITA WG2 Guidelines For The Design of Segmental Tunnel LiningsDokument60 SeitenITA WG2 Guidelines For The Design of Segmental Tunnel LiningsMehdi Bakhshi100% (1)
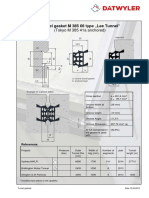
- Diagram M 385 66Dokument8 SeitenDiagram M 385 66Mehdi BakhshiNoch keine Bewertungen
- MFDokument1 SeiteMFMehdi BakhshiNoch keine Bewertungen
- Simulation of Train Load On Deformation of Big - Diameter Shield TunnelDokument4 SeitenSimulation of Train Load On Deformation of Big - Diameter Shield TunnelMehdi BakhshiNoch keine Bewertungen
- Brochure - Tunnelling Applications - Permanent Spray Concrete LiningDokument28 SeitenBrochure - Tunnelling Applications - Permanent Spray Concrete LiningMehdi Bakhshi100% (1)
- 13 15Dokument108 Seiten13 15Mehdi BakhshiNoch keine Bewertungen
- Self-Healing Capability of Fibre Reinforced CementDokument13 SeitenSelf-Healing Capability of Fibre Reinforced CementMehdi BakhshiNoch keine Bewertungen
- Concrete Tunnel Lining Fire Resistance and ProtectionDokument8 SeitenConcrete Tunnel Lining Fire Resistance and ProtectionMehdi BakhshiNoch keine Bewertungen
- Epoxy-Coated Reinforcement in Highway StructuresDokument70 SeitenEpoxy-Coated Reinforcement in Highway StructuresMehdi BakhshiNoch keine Bewertungen
- West End Dam-Section 35 20 23 DREDGINGDokument6 SeitenWest End Dam-Section 35 20 23 DREDGINGMehdi BakhshiNoch keine Bewertungen
- E EignungsprufungDokument8 SeitenE EignungsprufungMehdi BakhshiNoch keine Bewertungen
- UFGS 35 20 23 - Dredging For Waterway and Marine ConstructionDokument13 SeitenUFGS 35 20 23 - Dredging For Waterway and Marine ConstructionJose Leo MissionNoch keine Bewertungen
- 8 M Diameter 7 KM Long Beles Tailrace Tunnel (Ethiopia) Bored and Lined in Basaltic Formations in Less Than 12 MonthsDokument13 Seiten8 M Diameter 7 KM Long Beles Tailrace Tunnel (Ethiopia) Bored and Lined in Basaltic Formations in Less Than 12 MonthsMehdi BakhshiNoch keine Bewertungen
- ACI TCMDokument72 SeitenACI TCMMehdi BakhshiNoch keine Bewertungen
- sp280 6Dokument18 Seitensp280 6Mehdi BakhshiNoch keine Bewertungen
- Cechar Abrasivity Index CAIDokument86 SeitenCechar Abrasivity Index CAIRachmat S AraNoch keine Bewertungen
- Tac 2014 Paper 165Dokument9 SeitenTac 2014 Paper 165Mehdi BakhshiNoch keine Bewertungen
- Backcalculation of Residual Tensile StrengthDokument11 SeitenBackcalculation of Residual Tensile StrengthMehdi BakhshiNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Theory On The Kaplan Turbne Operation 1Dokument18 SeitenTheory On The Kaplan Turbne Operation 1Anonymous 1VhXp1Noch keine Bewertungen
- LED 36W 2X2 Panel Light: Halonix Technologies Private LimitedDokument1 SeiteLED 36W 2X2 Panel Light: Halonix Technologies Private Limitedamitthakur2006Noch keine Bewertungen
- Basic Perspective DrawingDokument32 SeitenBasic Perspective DrawingRegino GonzagaNoch keine Bewertungen
- UntitledDokument3 SeitenUntitledNurul Aina ZulkifliNoch keine Bewertungen
- 毫米波雷达Dokument2 Seiten毫米波雷达钱龙Noch keine Bewertungen
- Excersie - To Be Worked OnDokument2 SeitenExcersie - To Be Worked Ontewodros getuNoch keine Bewertungen
- Mine VentilationDokument2 SeitenMine VentilationTeddy Jane Castorico EncendenciaNoch keine Bewertungen
- Science Behind The Movie OppenhiemerDokument4 SeitenScience Behind The Movie OppenhiemerVinay JacobNoch keine Bewertungen
- Spinning Educatee Textile Testing and Quality Control-I Spinning EducateeDokument10 SeitenSpinning Educatee Textile Testing and Quality Control-I Spinning EducateeMoshiur Rahman KayesNoch keine Bewertungen
- UniquacDokument19 SeitenUniquacAjeeth Prabhu100% (1)
- 27.viscoelastic Responses of Polyhedral Oli PDFDokument5 Seiten27.viscoelastic Responses of Polyhedral Oli PDFVansala GanesanNoch keine Bewertungen
- Design and Analysis of Bushed Pin Flexible Coupling: April 2017Dokument9 SeitenDesign and Analysis of Bushed Pin Flexible Coupling: April 2017DOLSON BUTTI204008Noch keine Bewertungen
- Spek Travo 315 Kva SchneiderDokument2 SeitenSpek Travo 315 Kva SchneiderArmida Share100% (1)
- Centrifugal Compressor PDFDokument8 SeitenCentrifugal Compressor PDFSmokesoimu100% (2)
- 1-1703-US - Directional Valves For Oil and GreaseDokument8 Seiten1-1703-US - Directional Valves For Oil and Greaseli geneNoch keine Bewertungen
- Stage 0 183170022 RahulDokument43 SeitenStage 0 183170022 RahulManoj VishwakarmaNoch keine Bewertungen
- Lesson Exemplar in Science 8 Week 3Dokument6 SeitenLesson Exemplar in Science 8 Week 3Joyce PerezNoch keine Bewertungen
- Uenr66600001 L6aDokument9 SeitenUenr66600001 L6aDiego DiazNoch keine Bewertungen
- A Review Article On Solid Fuel Ducted RamjetDokument9 SeitenA Review Article On Solid Fuel Ducted RamjetIJRASETPublicationsNoch keine Bewertungen
- FADesignManual v2 14 SP PDFDokument88 SeitenFADesignManual v2 14 SP PDFpandu lambangNoch keine Bewertungen
- BS 5400-2 - LoadsDokument45 SeitenBS 5400-2 - LoadsКирилл ЕрмолаевNoch keine Bewertungen
- MELC 1: Illustrate The Six Trigonometric Ratios: Sine, Cosine, TangentDokument3 SeitenMELC 1: Illustrate The Six Trigonometric Ratios: Sine, Cosine, TangentRolando Jr SabangNoch keine Bewertungen
- VSCC - PowerFactory - Benchmark - v1 - Part IIDokument15 SeitenVSCC - PowerFactory - Benchmark - v1 - Part IIbenjaxxNoch keine Bewertungen
- Modul Perancangan Propeller 2Dokument56 SeitenModul Perancangan Propeller 2UmarNoch keine Bewertungen
- EVH 5150 III REAL 3 Channel and Stealth Mod PDFDokument13 SeitenEVH 5150 III REAL 3 Channel and Stealth Mod PDFFelix AlmesbergerNoch keine Bewertungen
- MND Gym Equipment PricelistDokument109 SeitenMND Gym Equipment PricelistSaifu M AsathNoch keine Bewertungen
- 12 ChemistryDokument38 Seiten12 ChemistryyoNoch keine Bewertungen
- Astm D 2161 PDFDokument25 SeitenAstm D 2161 PDFalbert_ben1380% (5)
- Assignment - I PH-101 & 201Dokument5 SeitenAssignment - I PH-101 & 201Hyenas 9Noch keine Bewertungen
- Hpvr-15 Axial Piston Pumps: Pressure and Volume Adjustment SensitivityDokument6 SeitenHpvr-15 Axial Piston Pumps: Pressure and Volume Adjustment Sensitivityenrique chavestaNoch keine Bewertungen