Das könnte Ihnen auch gefallen
- 152 Pince Ericc3 Version2Dokument2 Seiten152 Pince Ericc3 Version2Faical BharNoch keine Bewertungen
- 152 Pince Ericc3 Version2Dokument2 Seiten152 Pince Ericc3 Version2Chaymae OuahmaneNoch keine Bewertungen
- 152 2 Pince Ericc3 Version2 CorrigeDokument2 Seiten152 2 Pince Ericc3 Version2 CorrigeChaymae OuahmaneNoch keine Bewertungen
- CC 2Dokument6 SeitenCC 2Qitai WEINoch keine Bewertungen
- Synthese 2007-2008Dokument9 SeitenSynthese 2007-2008HamidNoch keine Bewertungen
- Examen 4 Algèbre 1Dokument2 SeitenExamen 4 Algèbre 1أرشيد محمدNoch keine Bewertungen
- 910 2Bm National 2013 Ss2 EnoncéDokument3 Seiten910 2Bm National 2013 Ss2 EnoncéYsr QuantNoch keine Bewertungen
- SR 2009Dokument3 SeitenSR 2009Mehdi OugriNoch keine Bewertungen
- TD3 Modelisation EX 5 (Corrigé)Dokument4 SeitenTD3 Modelisation EX 5 (Corrigé)Iheb JallouzNoch keine Bewertungen
- ExercicesofRigidbodiesmechanics ExercicesdemcaniquedesolidesrigidesDokument77 SeitenExercicesofRigidbodiesmechanics ExercicesdemcaniquedesolidesrigidesTàHa SamihNoch keine Bewertungen
- Corrigé Concours Blanc N°1 - 23-24Dokument3 SeitenCorrigé Concours Blanc N°1 - 23-24yasser bhNoch keine Bewertungen
- CNC Si MP 2009 CG PDFDokument14 SeitenCNC Si MP 2009 CG PDFJassir AmgroudNoch keine Bewertungen
- Chap 16Dokument10 SeitenChap 16Œū Ssa MēNoch keine Bewertungen
- Examen 5 Algèbre 1Dokument2 SeitenExamen 5 Algèbre 1أرشيد محمدNoch keine Bewertungen
- 208 Prehenseur CorrigeDokument4 Seiten208 Prehenseur CorrigeAhmed TalsiNoch keine Bewertungen
- Correction 2010 NorDokument6 SeitenCorrection 2010 NorMoulham KhalidNoch keine Bewertungen
- CNC 2011 CorrigéDokument23 SeitenCNC 2011 CorrigéImad NAKHI100% (1)
- Serie 01 L2Dokument3 SeitenSerie 01 L2Mouna BoumezbeurNoch keine Bewertungen
- TD1 RegulationDokument10 SeitenTD1 RegulationHifdi AyaNoch keine Bewertungen
- 921 2Bm National 2008 Ss1 EnoncéDokument3 Seiten921 2Bm National 2008 Ss1 EnoncéBouzkri BOUZKRINoch keine Bewertungen
- TD 02 Les Espaces VectorielsDokument2 SeitenTD 02 Les Espaces VectorielsMadjid ChaoucheNoch keine Bewertungen
- j1 127 2 TD EmbrayageDokument2 Seitenj1 127 2 TD EmbrayageFaical BharNoch keine Bewertungen
- TD 1 Correction - 1Dokument6 SeitenTD 1 Correction - 1Soufiane Frahtia30Noch keine Bewertungen
- CNC Si MP 2011 CGDokument23 SeitenCNC Si MP 2011 CGAyoub LeaziziNoch keine Bewertungen
- Rattrapage Année 2001-2002Dokument2 SeitenRattrapage Année 2001-2002mimaNoch keine Bewertungen
- FeuilleReduction 2Dokument4 SeitenFeuilleReduction 2Rose PatchouNoch keine Bewertungen
- DS N°4 22-23 Du 20-02-2023OKDokument2 SeitenDS N°4 22-23 Du 20-02-2023OKmangamanaNoch keine Bewertungen
- Série de Physique Thème: Dipôle RL+ Circuit RLC Amorti Exercice N°1Dokument2 SeitenSérie de Physique Thème: Dipôle RL+ Circuit RLC Amorti Exercice N°1Amine AlaoUii AlaouiNoch keine Bewertungen
- TD Statique CinématiqueDokument5 SeitenTD Statique CinématiqueNour Allah tabibNoch keine Bewertungen
- TD Statique CinématiqueDokument5 SeitenTD Statique CinématiqueAhmed fattoumNoch keine Bewertungen
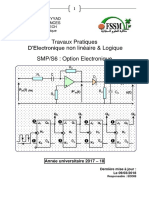
- Poly TP SMP S6 2018Dokument41 SeitenPoly TP SMP S6 2018ANAS ETTANANIANoch keine Bewertungen
- DS Micromoteur - Compresseur Clim CORRDokument1 SeiteDS Micromoteur - Compresseur Clim CORRAdil Hassani IdrissiNoch keine Bewertungen
- Eléments de Corrigé - DS2 - 1TSI3 - 23-24 - VFDokument4 SeitenEléments de Corrigé - DS2 - 1TSI3 - 23-24 - VFyasser bhNoch keine Bewertungen
- Serie3 Algèbre MatriceDokument2 SeitenSerie3 Algèbre MatriceKhalil LakhlifiNoch keine Bewertungen
- A1TDS22 TD3 Suite CorrigéDokument10 SeitenA1TDS22 TD3 Suite CorrigéBoualem MestafaNoch keine Bewertungen
- c02 TD Determiner Les Lois de Pilotage en MouvementDokument28 Seitenc02 TD Determiner Les Lois de Pilotage en MouvementLoic GomaNoch keine Bewertungen
- Exercice 1Dokument3 SeitenExercice 1hanane aissaoui0% (1)
- Chapitre2 Robotique 2017Dokument28 SeitenChapitre2 Robotique 2017askariceNoch keine Bewertungen
- 4 TD2221Dokument1 Seite4 TD2221Mahmoud Handase35Noch keine Bewertungen
- 4 TD1Dokument1 Seite4 TD1MOHAMMED AMINE EL ANSARYNoch keine Bewertungen
- 4 TD1Dokument1 Seite4 TD1MOHAMMED AMINE EL ANSARYNoch keine Bewertungen
- 4 TD1 PDFDokument1 Seite4 TD1 PDFdhouhaNoch keine Bewertungen
- 4 TD1 PDFDokument1 Seite4 TD1 PDFSafaeNoch keine Bewertungen
- 4 TD1 PDFDokument1 Seite4 TD1 PDFeslem amorNoch keine Bewertungen
- 4 TD1Dokument1 Seite4 TD1MOHAMMED AMINE EL ANSARYNoch keine Bewertungen
- FeuilleCourbes 2Dokument4 SeitenFeuilleCourbes 2fwhyNoch keine Bewertungen
- Prep 1-19Dokument1 SeitePrep 1-19yassine elmakssoudNoch keine Bewertungen
- Série 4 Diode À JonctionDokument2 SeitenSérie 4 Diode À Jonctionamina bassouNoch keine Bewertungen
- Devoir Du 3 Eme TRI 2 MathsDokument1 SeiteDevoir Du 3 Eme TRI 2 MathsSkiizy TuToNoch keine Bewertungen
- Ts Serie01 2024Dokument5 SeitenTs Serie01 2024rayanmakran2Noch keine Bewertungen
- $examen Final S1 UM6PDokument5 Seiten$examen Final S1 UM6PIchrak madromiNoch keine Bewertungen
- Cfao 3 CaoDokument7 SeitenCfao 3 Caocasanova casanovaNoch keine Bewertungen
- CC AlgèbreDokument11 SeitenCC AlgèbreClaude Francois AsseNoch keine Bewertungen
- s2 Math2015Dokument3 Seitens2 Math2015Joséphine NancasseNoch keine Bewertungen
- DevoirDokument2 SeitenDevoirIhssan KH100% (1)
- Sujet 2Dokument2 SeitenSujet 2Queren AhuiNoch keine Bewertungen
- TSS ds1 2022Dokument2 SeitenTSS ds1 2022omaima saadNoch keine Bewertungen
- Bac Blanc (Lycée Pilote Karouan) - Mathématiques - Bac Math (2007-2008)Dokument5 SeitenBac Blanc (Lycée Pilote Karouan) - Mathématiques - Bac Math (2007-2008)Seif Souid100% (2)
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésVon EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésBewertung: 4.5 von 5 Sternen4.5/5 (4)
- 02 - Newton PDFDokument4 Seiten02 - Newton PDFMiguel Clovis KamNoch keine Bewertungen
- 03 - Methode Du Pivot de Gauss Pages 1 A 4Dokument4 Seiten03 - Methode Du Pivot de Gauss Pages 1 A 4Miguel Clovis KamNoch keine Bewertungen
- CCP 2014 Langues Vivantes ObligatoireDokument15 SeitenCCP 2014 Langues Vivantes ObligatoireMiguel Clovis KamNoch keine Bewertungen
- 2 Problèmes Corrigé MagnétostatiqueDokument23 Seiten2 Problèmes Corrigé MagnétostatiqueMiguel Clovis KamNoch keine Bewertungen
- 143 5 Transmission Des Donnees Numeriques PDFDokument12 Seiten143 5 Transmission Des Donnees Numeriques PDFMiguel Clovis KamNoch keine Bewertungen
- 95 Resume Meca 2019Dokument6 Seiten95 Resume Meca 2019Hicham ZghariNoch keine Bewertungen
- 143 1 Complements PDFDokument6 Seiten143 1 Complements PDFMiguel Clovis KamNoch keine Bewertungen
- Résumé Global Du Cours de Sciences de L'ingénieurDokument30 SeitenRésumé Global Du Cours de Sciences de L'ingénieuralbertocontador57% (14)
- 1 - Cours Réseaux PDFDokument11 Seiten1 - Cours Réseaux PDFMiguel Clovis KamNoch keine Bewertungen
- 05 Phys SI MP 2Dokument14 Seiten05 Phys SI MP 2api-3762501Noch keine Bewertungen
- 150 3 Corccinp2019 Partiii PDFDokument3 Seiten150 3 Corccinp2019 Partiii PDFMiguel Clovis KamNoch keine Bewertungen
- Centrale Supelec MP 2000 Maths 1 EpreuveDokument5 SeitenCentrale Supelec MP 2000 Maths 1 EpreuveMiguel Clovis KamNoch keine Bewertungen
- 143 1 Complements PDFDokument6 Seiten143 1 Complements PDFMiguel Clovis KamNoch keine Bewertungen
- CNC MP 2001 Sii EpreuveDokument18 SeitenCNC MP 2001 Sii EpreuveMiguel Clovis KamNoch keine Bewertungen
- Cours Cinematique Du ContactDokument2 SeitenCours Cinematique Du ContactMiguel Clovis Kam100% (1)
- 143 5 Transmission Des Donnees Numeriques PDFDokument12 Seiten143 5 Transmission Des Donnees Numeriques PDFMiguel Clovis KamNoch keine Bewertungen
- 150 3 Corccinp2019 Partiii PDFDokument3 Seiten150 3 Corccinp2019 Partiii PDFMiguel Clovis KamNoch keine Bewertungen
- Devoir 15 Analyse Numerique Epreuve PDFDokument1 SeiteDevoir 15 Analyse Numerique Epreuve PDFMiguel Clovis KamNoch keine Bewertungen
- TDEspacesVectoriels PDFDokument4 SeitenTDEspacesVectoriels PDFMiguel Clovis KamNoch keine Bewertungen
- 21 Espaces Vectoriels PDFDokument44 Seiten21 Espaces Vectoriels PDFbechirNoch keine Bewertungen
- Centrale 2012 MP M1 EnonDokument4 SeitenCentrale 2012 MP M1 EnonanassesslimaniNoch keine Bewertungen
- Mathématiques Ii Filière MP: Partie I - Exemples ÉlémentairesDokument3 SeitenMathématiques Ii Filière MP: Partie I - Exemples Élémentairesanon-819597Noch keine Bewertungen
- Centrale Supelec MP 2012 Maths 2 EpreuveDokument4 SeitenCentrale Supelec MP 2012 Maths 2 EpreuveMiguel Clovis KamNoch keine Bewertungen
- Cours Outils Mathematiques Pour La MecaniqueDokument27 SeitenCours Outils Mathematiques Pour La MecaniqueMiguel Clovis KamNoch keine Bewertungen
- La - Salle - Chap1 - Cours - Optique - Physique V2019-20 PDFDokument20 SeitenLa - Salle - Chap1 - Cours - Optique - Physique V2019-20 PDFMiguel Clovis KamNoch keine Bewertungen
- La - Salle - Chap1 - Cours - Optique - Physique V2019-20 PDFDokument20 SeitenLa - Salle - Chap1 - Cours - Optique - Physique V2019-20 PDFMiguel Clovis KamNoch keine Bewertungen
- Didacticiel Papier - Sphinx Iq 2 PDFDokument442 SeitenDidacticiel Papier - Sphinx Iq 2 PDFAthenaDona100% (1)
- Poly JavaDokument176 SeitenPoly JavaLeonzoConstantiniNoch keine Bewertungen
- Exercices Chapitre 3 FractionsDokument3 SeitenExercices Chapitre 3 FractionsTony GRACANoch keine Bewertungen
- Corrige TD 8 1920 2Dokument5 SeitenCorrige TD 8 1920 2friends diaryNoch keine Bewertungen
- Mémoire de Master-YF-Post Soutenance-20200610Dokument70 SeitenMémoire de Master-YF-Post Soutenance-20200610Yacinthe FAYE100% (1)
- Api RestDokument8 SeitenApi RestfogoNoch keine Bewertungen
- ChapitreDokument8 SeitenChapitreAchour IfrekNoch keine Bewertungen
- Chapitre 1 - Eléments de Physique NucléaireDokument69 SeitenChapitre 1 - Eléments de Physique NucléaireMohamed El Hadi Redjaimia100% (1)
- 04 JSFT-echangeur-2012 GRESPI Fohanno PDFDokument21 Seiten04 JSFT-echangeur-2012 GRESPI Fohanno PDFzermiNoch keine Bewertungen
- Geometrie Pour Dao2 PDFDokument161 SeitenGeometrie Pour Dao2 PDFlekouf43100% (1)
- 3 - Modeles de Markov CachesDokument34 Seiten3 - Modeles de Markov CachesWISSALNoch keine Bewertungen
- DJE4394Dokument119 SeitenDJE4394danNoch keine Bewertungen
- GISEMENTDokument4 SeitenGISEMENTTouré AbdoulNoch keine Bewertungen
- Howto L3 IntervlanroutingDokument7 SeitenHowto L3 IntervlanroutingWilford ToussaintNoch keine Bewertungen
- ANNONCES ASSISTANTS MATERNELS-Disponibilités Secteur Lyautey Du 12 Juin 2020Dokument3 SeitenANNONCES ASSISTANTS MATERNELS-Disponibilités Secteur Lyautey Du 12 Juin 2020younes amaraNoch keine Bewertungen
- FeuilletageDokument25 SeitenFeuilletageLē JøkērNoch keine Bewertungen
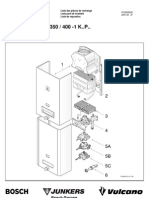
- W - 250 - 275 - 325 - 350 - 400 - 1 K..p..Dokument28 SeitenW - 250 - 275 - 325 - 350 - 400 - 1 K..p..joviadoNoch keine Bewertungen
- Examen de Fin de Formation 2008 Tsri Pratique Variante 9Dokument5 SeitenExamen de Fin de Formation 2008 Tsri Pratique Variante 9FatimaLENoch keine Bewertungen
- Algèbre 1 V. Def 2017-2018Dokument141 SeitenAlgèbre 1 V. Def 2017-2018Alexis Rosuel100% (1)
- TP Conduction CompletDokument10 SeitenTP Conduction Complethamza layachi75% (4)
- Serco FDokument26 SeitenSerco FRV PenrroiNoch keine Bewertungen
- Maths X PSI 1998 (Enoncé)Dokument7 SeitenMaths X PSI 1998 (Enoncé)LM --Noch keine Bewertungen
- Sujet Bac 2023 Guinee Niger MathsDokument5 SeitenSujet Bac 2023 Guinee Niger Mathsmr.4chiffreNoch keine Bewertungen
- UE Cybersécurité-Initiation Metasploit v0.3Dokument17 SeitenUE Cybersécurité-Initiation Metasploit v0.3didierNoch keine Bewertungen
- Année Prépa Electricité, Deuxième PartieDokument221 SeitenAnnée Prépa Electricité, Deuxième PartieAbdelkader Faklani DouNoch keine Bewertungen
- Incendie: I-Prévention Et ProtectionDokument4 SeitenIncendie: I-Prévention Et Protectionraid bazizNoch keine Bewertungen
- Rapport Optimisation Sur MatlabDokument13 SeitenRapport Optimisation Sur MatlabLino YETONGNONNoch keine Bewertungen
- CC 1 Analyse Natalia Borbón TorresDokument3 SeitenCC 1 Analyse Natalia Borbón TorresNatalia Borbon TorresNoch keine Bewertungen
- NF EN 1431 (Mai 2009)Dokument19 SeitenNF EN 1431 (Mai 2009)Fatima BouhajaNoch keine Bewertungen
- TP 1Dokument1 SeiteTP 1djennati100% (1)