Das könnte Ihnen auch gefallen
- Documen SSXSPDDokument2 SeitenDocumen SSXSPDwiliamNoch keine Bewertungen
- Pertemuan 8 - Chapter 15 - Teori Kepribadian Yang Berbeda, Pendekatan Myers Briggs Type Indicator (MBTI) & Big Five ModelDokument49 SeitenPertemuan 8 - Chapter 15 - Teori Kepribadian Yang Berbeda, Pendekatan Myers Briggs Type Indicator (MBTI) & Big Five ModelwiliamNoch keine Bewertungen
- RINGKASANDokument1 SeiteRINGKASANwiliamNoch keine Bewertungen
- Cup 897243Dokument1 SeiteCup 897243wiliamNoch keine Bewertungen
- Scimedicine Journal: Effect of Red Dragon Fruit Juice On Acrylic Resin ColorDokument8 SeitenScimedicine Journal: Effect of Red Dragon Fruit Juice On Acrylic Resin ColorwiliamNoch keine Bewertungen
- 6f1eeec6c62f69bad7813ce4fcfc080dDokument11 Seiten6f1eeec6c62f69bad7813ce4fcfc080dwiliamNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Tentative CatalogueBGR20220901182Dokument23 SeitenTentative CatalogueBGR20220901182Vasanth rNoch keine Bewertungen
- Magazine-ETC (SANCHAR-2023)Dokument38 SeitenMagazine-ETC (SANCHAR-2023)Ajit PatraNoch keine Bewertungen
- MG Gloster - Launch Brochure PDFDokument28 SeitenMG Gloster - Launch Brochure PDFsumitNoch keine Bewertungen
- CAM2149 80565-417 SuperProMax 20W-50 Product Bulletin v2Dokument2 SeitenCAM2149 80565-417 SuperProMax 20W-50 Product Bulletin v2engerbethNoch keine Bewertungen
- Break Even Analysis and Decision MakingDokument216 SeitenBreak Even Analysis and Decision Makingkcmiyyappan2701Noch keine Bewertungen
- Motorway Car Rental QuotationDokument3 SeitenMotorway Car Rental QuotationGina LiemNoch keine Bewertungen
- Dieci - ICARUS 40 - 17 - S - N 1792010 PartsDokument421 SeitenDieci - ICARUS 40 - 17 - S - N 1792010 Partsmark G100% (3)
- Board Activity Report 3Q2023 ENG - WebDokument26 SeitenBoard Activity Report 3Q2023 ENG - WebSemanur GüneşNoch keine Bewertungen
- Logistics Management Introduction EngDokument13 SeitenLogistics Management Introduction EngAhmed HajaliNoch keine Bewertungen
- Shruti Assignment 4,5Dokument20 SeitenShruti Assignment 4,5Shruti SuryawanshiNoch keine Bewertungen
- Cumulative Damage FactorDokument9 SeitenCumulative Damage FactorTim LinNoch keine Bewertungen
- Gmail - Travel Itinerary Sent From United Airlines, Inc.Dokument1 SeiteGmail - Travel Itinerary Sent From United Airlines, Inc.Abhi ChanvNoch keine Bewertungen
- User'S Guide: One-Way AM RemoteDokument8 SeitenUser'S Guide: One-Way AM RemoteBruno PilieciNoch keine Bewertungen
- Glossary of Shipping Terms - YRC Freight - The Original LTL Carrier Since 1924Dokument6 SeitenGlossary of Shipping Terms - YRC Freight - The Original LTL Carrier Since 1924Alex PeraNoch keine Bewertungen
- Garis Panduan CTA 2020Dokument5 SeitenGaris Panduan CTA 2020张正Noch keine Bewertungen
- Resume:: Motor Man / Oiler::: 10: Married: English, Hindi&Telugu: 09704464085, 07981399781Dokument2 SeitenResume:: Motor Man / Oiler::: 10: Married: English, Hindi&Telugu: 09704464085, 07981399781Naveen MylapilliNoch keine Bewertungen
- Forklifts Operations: 16 Simple Tips For Safety Operating of ForkliftDokument19 SeitenForklifts Operations: 16 Simple Tips For Safety Operating of ForkliftCio IonNoch keine Bewertungen
- Name: Waleed Aftab Assignment No 1 Topic: Leonardo de Vinci Reg no:BAM02163021 Section:0Dokument2 SeitenName: Waleed Aftab Assignment No 1 Topic: Leonardo de Vinci Reg no:BAM02163021 Section:0Waleed AftabNoch keine Bewertungen
- Comparatii AutoDokument5 SeitenComparatii AutoCristian GavrilasNoch keine Bewertungen
- Toyota Hilux and Hilux ConquestDokument2 SeitenToyota Hilux and Hilux ConquestMarvin VinaraoNoch keine Bewertungen
- TakeoffDokument43 SeitenTakeoffAnup KhatriNoch keine Bewertungen
- Kantri Setiawan Pangestu - 2210301017 - Tugas 1 - Pengatar PariwisataDokument8 SeitenKantri Setiawan Pangestu - 2210301017 - Tugas 1 - Pengatar Pariwisatakantri setiawanNoch keine Bewertungen
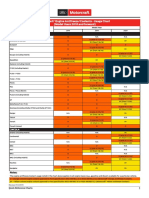
- Motorcraft Engine Antifreeze/Coolants - Usage Chart (Model Years 2018 and Forward)Dokument4 SeitenMotorcraft Engine Antifreeze/Coolants - Usage Chart (Model Years 2018 and Forward)Eduardo NavarroNoch keine Bewertungen
- Soal Mid B.inggris Kelas 5 Semester IIDokument5 SeitenSoal Mid B.inggris Kelas 5 Semester IIAna Anita Sari100% (2)
- Amt 4101 Activity 2Dokument15 SeitenAmt 4101 Activity 2Brendan Lewis DelgadoNoch keine Bewertungen
- Product Sheet FTD Airbus Feb2011Dokument2 SeitenProduct Sheet FTD Airbus Feb2011Redouane BelaassiriNoch keine Bewertungen
- Odes 850Dokument97 SeitenOdes 850Elmir BesiriNoch keine Bewertungen
- GSO Technical Regulations MV 2024 MY D2Dokument11 SeitenGSO Technical Regulations MV 2024 MY D2zhaobaoaixiaoyanNoch keine Bewertungen
- QTCM Part ofDokument95 SeitenQTCM Part ofkumarpr3745Noch keine Bewertungen
- Traffic Engineering Model PaperDokument2 SeitenTraffic Engineering Model PaperMr. Y. RajeshNoch keine Bewertungen