Das könnte Ihnen auch gefallen
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Von EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Noch keine Bewertungen
- Electromagnetic WaveDokument33 SeitenElectromagnetic WaveDurriyah AmiiNoch keine Bewertungen
- Kinetic Energy in Laminar Pipe FlowDokument4 SeitenKinetic Energy in Laminar Pipe FlowCamille CrnNoch keine Bewertungen
- 10 11648 J Ajam 20221004 14Dokument19 Seiten10 11648 J Ajam 20221004 14Rachid Cpge KhansaNoch keine Bewertungen
- MATLAB Code For Solving 2 D Viscous FlowDokument21 SeitenMATLAB Code For Solving 2 D Viscous FlowHiếu NguyễnNoch keine Bewertungen
- ME631A: Viscous Flow TheoryDokument4 SeitenME631A: Viscous Flow TheoryjamesNoch keine Bewertungen
- Structure of A Turbulent Boundary LayerDokument7 SeitenStructure of A Turbulent Boundary LayerHeba ElsamadNoch keine Bewertungen
- Incompressible Couette Flow: Maciej Matyka Email: Maq@panoramix - Ift.uni - Wroc.plDokument12 SeitenIncompressible Couette Flow: Maciej Matyka Email: Maq@panoramix - Ift.uni - Wroc.plvenkatadriKNoch keine Bewertungen
- Allievi-Bermejo IJNMF 2000 v32 p439-464Dokument26 SeitenAllievi-Bermejo IJNMF 2000 v32 p439-464Akhil francisNoch keine Bewertungen
- 2210 07191Dokument177 Seiten2210 07191nunes.me.ruiNoch keine Bewertungen
- Shockley Charge JAPL 1938Dokument2 SeitenShockley Charge JAPL 1938litojoseNoch keine Bewertungen
- CTPP 2150340206Dokument6 SeitenCTPP 2150340206فتيح ازوNoch keine Bewertungen
- Some Computations in Background Independent Off-Shell String TheoryDokument16 SeitenSome Computations in Background Independent Off-Shell String TheorymlmilleratmitNoch keine Bewertungen
- Chapter 9 Flow Over Immersed Bodies: Basic ConsiderationsDokument37 SeitenChapter 9 Flow Over Immersed Bodies: Basic ConsiderationsChandan kumarNoch keine Bewertungen
- International Journal for Numerical Methods in Fluids Volume 42 issue 8 2003 [doi 10.1002_fld.563] R. M. Barron; Ali A. Salehi Neyshabouri -- Effects of under-relaxation factors on turbulent flow simulations.pdfDokument6 SeitenInternational Journal for Numerical Methods in Fluids Volume 42 issue 8 2003 [doi 10.1002_fld.563] R. M. Barron; Ali A. Salehi Neyshabouri -- Effects of under-relaxation factors on turbulent flow simulations.pdfarash501Noch keine Bewertungen
- EM OscillationsDokument6 SeitenEM OscillationsHamin GilNoch keine Bewertungen
- Tutorial - Lecture 4 SolutionsDokument5 SeitenTutorial - Lecture 4 SolutionsBastián Olfos MárquezNoch keine Bewertungen
- Special Theory of RelativityDokument52 SeitenSpecial Theory of RelativityAnik100% (8)
- Cirac Zoller PRLDokument4 SeitenCirac Zoller PRLFJosé PirtNoch keine Bewertungen
- Architecture Absorbing Auc06 Babtie PDFDokument18 SeitenArchitecture Absorbing Auc06 Babtie PDFAnupEkboteNoch keine Bewertungen
- 06.0 PP 30 59 Single-Particle MotionDokument30 Seiten06.0 PP 30 59 Single-Particle MotionmhumbertNoch keine Bewertungen
- Fault-Tolerant Quantum Computation by AnyonsDokument27 SeitenFault-Tolerant Quantum Computation by Anyonsfarsad ahmadNoch keine Bewertungen
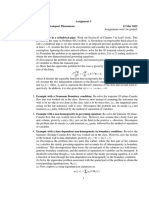
- Assignment On Transport PhenomenaDokument2 SeitenAssignment On Transport PhenomenaShloka PatilNoch keine Bewertungen
- Lec10 PDFDokument6 SeitenLec10 PDFAdelina Lumban GaolNoch keine Bewertungen
- Rationality Problems of The Principles of Equivalence and General RelativityDokument8 SeitenRationality Problems of The Principles of Equivalence and General RelativityScientificBoysClubNoch keine Bewertungen
- Determination of Flow Properties of Mud Slurry: Ridwan, Yanuar, Budiarso, and Raldi AKDokument5 SeitenDetermination of Flow Properties of Mud Slurry: Ridwan, Yanuar, Budiarso, and Raldi AKkurniawan waskitoNoch keine Bewertungen
- Mandeep Singh CFD ReportDokument30 SeitenMandeep Singh CFD ReportAnonymous UoHUagNoch keine Bewertungen
- Computers and Mathematics With Applications: Maddu Shankar, S. SundarDokument11 SeitenComputers and Mathematics With Applications: Maddu Shankar, S. SundarAT8iNoch keine Bewertungen
- Level Set MethodDokument38 SeitenLevel Set MethodMuhammadArifAzwNoch keine Bewertungen
- Numerical Simulation of Flow Around A Circular Cylinder at Moderate Reynolds NumbersDokument15 SeitenNumerical Simulation of Flow Around A Circular Cylinder at Moderate Reynolds NumbersJohnnyNoch keine Bewertungen
- Mechanics IV: OscillationsDokument17 SeitenMechanics IV: Oscillations66 SB jay gotiNoch keine Bewertungen
- Turbulence Model PDFDokument18 SeitenTurbulence Model PDFMuhammad Zubair SheikhNoch keine Bewertungen
- Bona Wu InviscidDokument14 SeitenBona Wu Inviscidhaifa ben fredjNoch keine Bewertungen
- The Role of The Kutta-Joukowski Condition in The Numerical Solution of Euler Equations For A Symmetrical AirfoilDokument15 SeitenThe Role of The Kutta-Joukowski Condition in The Numerical Solution of Euler Equations For A Symmetrical AirfoilShajahan ShagulNoch keine Bewertungen
- PHYS 221 Modern Physics HW8 Notes: 1 Special RelativityDokument3 SeitenPHYS 221 Modern Physics HW8 Notes: 1 Special RelativityJoNoch keine Bewertungen
- Topics in Propagation of Chaos - SznitmanDokument87 SeitenTopics in Propagation of Chaos - SznitmanNicoleta CazacuNoch keine Bewertungen
- Johnson Zubrun Noble Roll WavesDokument31 SeitenJohnson Zubrun Noble Roll WavesStuart SpinnerNoch keine Bewertungen
- Finite Element Simulation of Dip Coating, I - Newtonian FluidsDokument17 SeitenFinite Element Simulation of Dip Coating, I - Newtonian FluidsLindsay SchneiderNoch keine Bewertungen
- Fimfeififviifv FJFNFNFNFJFNFDokument18 SeitenFimfeififviifv FJFNFNFNFJFNFHari NirmalNoch keine Bewertungen
- Pro RedDokument6 SeitenPro RedNicolas ZapataNoch keine Bewertungen
- ECH141 - Lubrication FlowsDokument14 SeitenECH141 - Lubrication FlowsKaul PatrickNoch keine Bewertungen
- Finite Difference Method... Dr. Hatem MOKHTARIDokument3 SeitenFinite Difference Method... Dr. Hatem MOKHTARIDr. Hatem MOKHTARI100% (2)
- Vena Contracta: Joseph Henry Laboratories, Princeton University, Princeton, NJ 08544Dokument6 SeitenVena Contracta: Joseph Henry Laboratories, Princeton University, Princeton, NJ 08544aiur111Noch keine Bewertungen
- Flow Over A Backward Facing Step: TMMV08 Assignment 3Dokument9 SeitenFlow Over A Backward Facing Step: TMMV08 Assignment 3Arturo Mateos RodríguezNoch keine Bewertungen
- Problem 2. Nonlinear Trio : Part I: Nonlinearity and Direct CurrentDokument7 SeitenProblem 2. Nonlinear Trio : Part I: Nonlinearity and Direct CurrentEduard BurlacuNoch keine Bewertungen
- Turbulence Modeling: Cuong Nguyen November 05, 2005Dokument6 SeitenTurbulence Modeling: Cuong Nguyen November 05, 2005hilmanmuntahaNoch keine Bewertungen
- Adiabatic Invariants: Example 1Dokument9 SeitenAdiabatic Invariants: Example 1Vilakshan Gupta100% (1)
- Gravitomagnetic Field of A Rotating Superconductor - ESADokument11 SeitenGravitomagnetic Field of A Rotating Superconductor - ESANullpunktsenergie100% (1)
- CWI, Centre For Mathematics and Computer Science P.O.Box 4079, 1009 AB Amsterdam, The NetherlandsDokument16 SeitenCWI, Centre For Mathematics and Computer Science P.O.Box 4079, 1009 AB Amsterdam, The NetherlandsGönenç Can AltunNoch keine Bewertungen
- Turbulence Modelling SPRING 2011: Mean Fluid Variables in A Turbulent FlowDokument17 SeitenTurbulence Modelling SPRING 2011: Mean Fluid Variables in A Turbulent FlowAnil Kumar MattaNoch keine Bewertungen
- GR Endsem Spring 2022Dokument2 SeitenGR Endsem Spring 2022Tarak Ram AlapatiNoch keine Bewertungen
- Zylka JCP 1989 A Comparison Between Simulations and Various Approximations For HookeanDokument8 SeitenZylka JCP 1989 A Comparison Between Simulations and Various Approximations For Hookeanpraphul kumarNoch keine Bewertungen
- ExamDokument3 SeitenExamLionel CarlosNoch keine Bewertungen
- Exp 6 SquidDokument5 SeitenExp 6 SquidNischayNoch keine Bewertungen
- Flow Around A CylinderDokument75 SeitenFlow Around A CylinderHiếu NguyễnNoch keine Bewertungen
- Course Home1 PDFDokument12 SeitenCourse Home1 PDFSandeep BadigantiNoch keine Bewertungen
- M54 Unit 10 Skew Deck & Intergral BridgesDokument25 SeitenM54 Unit 10 Skew Deck & Intergral BridgesPhilip YapNoch keine Bewertungen
- Trial Methods For A Nonlinear Bernoulli Problem: Report 6/1996Dokument20 SeitenTrial Methods For A Nonlinear Bernoulli Problem: Report 6/1996Henry KasumbaNoch keine Bewertungen
- Modern I: Semiclassical Mechanics: 1 The WKB ApproximationDokument17 SeitenModern I: Semiclassical Mechanics: 1 The WKB ApproximationSkanda.R. VasistaNoch keine Bewertungen
- Gusset Plate Inadequacy: Carl R. SchultheiszDokument21 SeitenGusset Plate Inadequacy: Carl R. SchultheiszAlexandra Putri NominaNoch keine Bewertungen
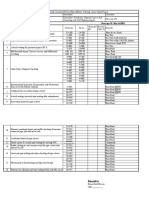
- Surveying Monthly Report MAY 2023.Dokument3 SeitenSurveying Monthly Report MAY 2023.AshebirNoch keine Bewertungen
- 12d20106a Prestressed ConcreteDokument2 Seiten12d20106a Prestressed ConcreteBheema SurendraNoch keine Bewertungen
- Lecture 1Dokument38 SeitenLecture 1naresh kumarNoch keine Bewertungen
- Forming and Shoring Systems: MascoDokument54 SeitenForming and Shoring Systems: MascoUttam Kumar Ghosh100% (1)
- 1.5 Practice Questions & Answers - 1 PDFDokument5 Seiten1.5 Practice Questions & Answers - 1 PDFMega GamesNoch keine Bewertungen
- 905 025 2 AnchorDokument24 Seiten905 025 2 AnchorAndrés Esteban Garzón RamírezNoch keine Bewertungen
- Design of A Reservoir Detention PDFDokument8 SeitenDesign of A Reservoir Detention PDFdragos_georgescu2010Noch keine Bewertungen
- Flood Routing Material & ExcerciseDokument8 SeitenFlood Routing Material & Excercisegoo od100% (1)
- Inviscid Flow: Governing EquationsDokument2 SeitenInviscid Flow: Governing EquationsKantharaj ChinnappaNoch keine Bewertungen
- Sluice Gates ExportDokument20 SeitenSluice Gates ExportsaishankarlNoch keine Bewertungen
- Problem Set 4 in FluidsDokument1 SeiteProblem Set 4 in Fluidsnaikin_1031Noch keine Bewertungen
- Hardening Soil ModelDokument4 SeitenHardening Soil Modelprantik.ceNoch keine Bewertungen
- DETERMINATIN OF THECONTENTOfDELTAFERRITE IN AUSTENITIC STAINLESS STEEL NITRONIC 60 PDFDokument4 SeitenDETERMINATIN OF THECONTENTOfDELTAFERRITE IN AUSTENITIC STAINLESS STEEL NITRONIC 60 PDFEmad A.AhmadNoch keine Bewertungen
- Etce 208Dokument1 SeiteEtce 208Sourabh PandeyNoch keine Bewertungen
- Applications of Vibro For Infra Structure Projects in IndiaDokument8 SeitenApplications of Vibro For Infra Structure Projects in IndiasuvraNoch keine Bewertungen
- ESTIMATE SWIMMING POOL (Version 1zDokument7 SeitenESTIMATE SWIMMING POOL (Version 1zcoffee addict 73Noch keine Bewertungen
- Structural Use of Bamboo. Part 4: Element Design Equations: SynopsisDokument4 SeitenStructural Use of Bamboo. Part 4: Element Design Equations: SynopsisVictor OmotoriogunNoch keine Bewertungen
- SS 557-2010Dokument64 SeitenSS 557-2010jclimkanghaiNoch keine Bewertungen
- 19 Types of Cement - Properties and Uses in Construction - Cement ConcreteDokument9 Seiten19 Types of Cement - Properties and Uses in Construction - Cement Concretevishnu ksNoch keine Bewertungen
- Summary Split Duct Bontang 08.01.2021 AgungDokument1 SeiteSummary Split Duct Bontang 08.01.2021 AgungCitimall BontangNoch keine Bewertungen
- DME-Online Class Sep2020-Module 2-PartB PDFDokument37 SeitenDME-Online Class Sep2020-Module 2-PartB PDFMathew John100% (1)
- Tuf Tite Distribution Box 9 HoleDokument2 SeitenTuf Tite Distribution Box 9 HoleWynn Wood HOA Web MasterNoch keine Bewertungen
- Tool Life, Tool Wear Machinability PDFDokument9 SeitenTool Life, Tool Wear Machinability PDFshivaNoch keine Bewertungen
- Subject Lecturer: Ban Ahmed Khaleel: Experiment No. (1) : "Determination of Slump of Fresh Concrete"Dokument4 SeitenSubject Lecturer: Ban Ahmed Khaleel: Experiment No. (1) : "Determination of Slump of Fresh Concrete"AL SniperNoch keine Bewertungen
- Ib75 Abrasion ResistanceDokument3 SeitenIb75 Abrasion ResistanceEloy Jimenez OntiverosNoch keine Bewertungen
- Paper-Sand Cemented GroutDokument8 SeitenPaper-Sand Cemented GroutSajid IqbalNoch keine Bewertungen
- DHS Unit 1 To 3 MCQsDokument37 SeitenDHS Unit 1 To 3 MCQsSumair Lone67% (6)
- Taking Off Project (Contract and Estimation)Dokument16 SeitenTaking Off Project (Contract and Estimation)muhammad alifNoch keine Bewertungen
- P.E. Civil Exam Review: Structural AnalysisDokument46 SeitenP.E. Civil Exam Review: Structural AnalysisBrandonNoch keine Bewertungen
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseVon EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseBewertung: 3.5 von 5 Sternen3.5/5 (69)
- The Other End of the Leash: Why We Do What We Do Around DogsVon EverandThe Other End of the Leash: Why We Do What We Do Around DogsBewertung: 5 von 5 Sternen5/5 (65)
- The Lives of Bees: The Untold Story of the Honey Bee in the WildVon EverandThe Lives of Bees: The Untold Story of the Honey Bee in the WildBewertung: 4.5 von 5 Sternen4.5/5 (44)
- Alex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessVon EverandAlex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessNoch keine Bewertungen
- Spoiled Rotten America: Outrages of Everyday LifeVon EverandSpoiled Rotten America: Outrages of Everyday LifeBewertung: 3 von 5 Sternen3/5 (19)
- The Ancestor's Tale: A Pilgrimage to the Dawn of EvolutionVon EverandThe Ancestor's Tale: A Pilgrimage to the Dawn of EvolutionBewertung: 4 von 5 Sternen4/5 (812)
- The Best American Science And Nature Writing 2021Von EverandThe Best American Science And Nature Writing 2021Bewertung: 4 von 5 Sternen4/5 (8)
- The Revolutionary Genius of Plants: A New Understanding of Plant Intelligence and BehaviorVon EverandThe Revolutionary Genius of Plants: A New Understanding of Plant Intelligence and BehaviorBewertung: 4.5 von 5 Sternen4.5/5 (137)
- When You Find Out the World Is Against You: And Other Funny Memories About Awful MomentsVon EverandWhen You Find Out the World Is Against You: And Other Funny Memories About Awful MomentsBewertung: 3.5 von 5 Sternen3.5/5 (13)
- The Rise and Fall of the Dinosaurs: A New History of a Lost WorldVon EverandThe Rise and Fall of the Dinosaurs: A New History of a Lost WorldBewertung: 4 von 5 Sternen4/5 (596)
- Fire Season: Field Notes from a Wilderness LookoutVon EverandFire Season: Field Notes from a Wilderness LookoutBewertung: 4 von 5 Sternen4/5 (142)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingVon EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingBewertung: 5 von 5 Sternen5/5 (5)
- World of Wonders: In Praise of Fireflies, Whale Sharks, and Other AstonishmentsVon EverandWorld of Wonders: In Praise of Fireflies, Whale Sharks, and Other AstonishmentsBewertung: 4 von 5 Sternen4/5 (223)
- Come Back, Como: Winning the Heart of a Reluctant DogVon EverandCome Back, Como: Winning the Heart of a Reluctant DogBewertung: 3.5 von 5 Sternen3.5/5 (10)
- Remnants of Ancient Life: The New Science of Old FossilsVon EverandRemnants of Ancient Life: The New Science of Old FossilsBewertung: 3 von 5 Sternen3/5 (3)
- Darwin's Doubt: The Explosive Origin of Animal Life and the Case for Intelligent DesignVon EverandDarwin's Doubt: The Explosive Origin of Animal Life and the Case for Intelligent DesignBewertung: 4 von 5 Sternen4/5 (19)
- Wayfinding: The Science and Mystery of How Humans Navigate the WorldVon EverandWayfinding: The Science and Mystery of How Humans Navigate the WorldBewertung: 4.5 von 5 Sternen4.5/5 (18)
- The Mind of Plants: Narratives of Vegetal IntelligenceVon EverandThe Mind of Plants: Narratives of Vegetal IntelligenceBewertung: 4.5 von 5 Sternen4.5/5 (12)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingVon EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingBewertung: 3.5 von 5 Sternen3.5/5 (35)
- The Hawk's Way: Encounters with Fierce BeautyVon EverandThe Hawk's Way: Encounters with Fierce BeautyBewertung: 4.5 von 5 Sternen4.5/5 (19)















![International Journal for Numerical Methods in Fluids Volume 42 issue 8 2003 [doi 10.1002_fld.563] R. M. Barron; Ali A. Salehi Neyshabouri -- Effects of under-relaxation factors on turbulent flow simulations.pdf](https://imgv2-2-f.scribdassets.com/img/document/181951915/149x198/9497398f6b/1383720616?v=1)