Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Chapter 4: System Architecture: ADC Dma PicsDokument11 SeitenChapter 4: System Architecture: ADC Dma Picscarlosmg4Noch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- 3.4.5 Boot Modes: Chapter 3: Getting It WorkingDokument11 Seiten3.4.5 Boot Modes: Chapter 3: Getting It Workingcarlosmg4Noch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Insider's Guide STM32: The To The ARM®Based MicrocontrollerDokument10 SeitenInsider's Guide STM32: The To The ARM®Based Microcontrollercarlosmg4Noch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- SIXBID Coin Collector's Archive - Gobierno Provisional Segovia - Cal 23Dokument2 SeitenSIXBID Coin Collector's Archive - Gobierno Provisional Segovia - Cal 23carlosmg4Noch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- gm5621-LF-AA Genesis LCD Controller PDFDokument66 Seitengm5621-LF-AA Genesis LCD Controller PDFcarlosmg4100% (1)
- Manual de Agb WirelessDokument1 SeiteManual de Agb Wirelesscarlosmg4Noch keine Bewertungen
- A Review and Proposed Automated Irrigation System Using Soil Moisture Sensor and Android AppDokument9 SeitenA Review and Proposed Automated Irrigation System Using Soil Moisture Sensor and Android AppHarsh Vardhan Singh TomarNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Electronic Code Lock With User Defined Password Using 8051Dokument21 SeitenElectronic Code Lock With User Defined Password Using 8051Devanshu Kumar100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Abstract ProjectDokument2 SeitenAbstract ProjectAli BhuttaNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Samsung YPZ5 Service ManualDokument48 SeitenSamsung YPZ5 Service ManualMusorkaNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Interfacing of LCD With 8051 Microcontroller in Proteus ISIS - The Engineering Projects PDFDokument8 SeitenInterfacing of LCD With 8051 Microcontroller in Proteus ISIS - The Engineering Projects PDFTeo JavaNoch keine Bewertungen
- ServoMagazine 12-2003Dokument80 SeitenServoMagazine 12-2003Aldo RodriguezNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- 230907SMDK6410 Users Manual Rev10Dokument99 Seiten230907SMDK6410 Users Manual Rev10呂清溪Noch keine Bewertungen
- Alcohol Detection For Car Locking SystemDokument4 SeitenAlcohol Detection For Car Locking SystemPetros ZtnNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Embedded ProcessorsDokument20 SeitenEmbedded ProcessorsDarryl Kevin TauroNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Ocr System ArchitectureDokument15 SeitenOcr System ArchitectureNazrul IslamNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- 3-DOF-Scara-Robot-Thesis Đ ÁnDokument35 Seiten3-DOF-Scara-Robot-Thesis Đ ÁnXuân BảoNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Water Level Monitoring: Application NoteDokument24 SeitenWater Level Monitoring: Application Notedavideosto3560Noch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Development and Validation of A Miniature Programmable TDCS DeviceDokument8 SeitenDevelopment and Validation of A Miniature Programmable TDCS DevicenetoNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Zigbee Based Car Security SystemDokument23 SeitenZigbee Based Car Security SystemvijitizerNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- MICROCONTROLLER FAMILY of PIC 18Dokument29 SeitenMICROCONTROLLER FAMILY of PIC 18Taha AssadiNoch keine Bewertungen
- An Embedded Systems Laboratory To Support Rapid Prototyping of Robotics and The Internet of ThingsDokument3 SeitenAn Embedded Systems Laboratory To Support Rapid Prototyping of Robotics and The Internet of ThingsRaghu NathNoch keine Bewertungen
- 6th Sem Syllabus PDFDokument6 Seiten6th Sem Syllabus PDFArchit AgrawalNoch keine Bewertungen
- Pulse SensorDokument111 SeitenPulse SensorRossniePijieNoch keine Bewertungen
- An 3927Dokument72 SeitenAn 3927Anderson ArjonaNoch keine Bewertungen
- oPCOM UpustvoDokument2 SeitenoPCOM Upustvomirsad salihovicNoch keine Bewertungen
- Atmel University India-Design ContestDokument2 SeitenAtmel University India-Design ContestAviral PalNoch keine Bewertungen
- Time Operated Electrical Appliance Control SystemDokument82 SeitenTime Operated Electrical Appliance Control Systempoozu100% (1)
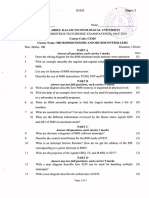
- KTU S5 Microprocessor and Microcontroller CSE May 2019 Question PaperDokument2 SeitenKTU S5 Microprocessor and Microcontroller CSE May 2019 Question PaperAnand Baburajan0% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- DRV8312 C2 KIT HWGuideDokument12 SeitenDRV8312 C2 KIT HWGuideYang ElvisQUNoch keine Bewertungen
- Infineon TriCore Family BR ProductBrochure v01 00 enDokument84 SeitenInfineon TriCore Family BR ProductBrochure v01 00 enSergio HernandezNoch keine Bewertungen
- AT89S52Dokument9 SeitenAT89S52Aarthi GurunathanNoch keine Bewertungen
- Design and Implementation of Technique of Maximum Power Utilization of Solar PanelDokument16 SeitenDesign and Implementation of Technique of Maximum Power Utilization of Solar Panelg arunNoch keine Bewertungen
- Design and Implementation of Automatic RDokument7 SeitenDesign and Implementation of Automatic RcabdimaalikscmNoch keine Bewertungen
- A GSM Based Intelligent Wireless Mobile Patient Monitoring System PDFDokument5 SeitenA GSM Based Intelligent Wireless Mobile Patient Monitoring System PDFesatjournalsNoch keine Bewertungen
- Design and Construction of A Digital Relay For MultiDokument58 SeitenDesign and Construction of A Digital Relay For MultiOgbodo EmmanuelNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)