Das könnte Ihnen auch gefallen
- Geo LocalisationDokument18 SeitenGeo LocalisationNourDine Ait ZenguiNoch keine Bewertungen
- Instruction ANCFCC GPSDokument16 SeitenInstruction ANCFCC GPSHicham El MaatiNoch keine Bewertungen
- Fonctionnement GPSDokument43 SeitenFonctionnement GPSIlham El MourabitNoch keine Bewertungen
- 26403436m11 Notions Et Concepts de La Topographie BTP TSCT PDFDokument137 Seiten26403436m11 Notions Et Concepts de La Topographie BTP TSCT PDFSalim Said Mansour80% (5)
- Etude de La Geolocalisation Des Mobiles Cas de DoualaDokument28 SeitenEtude de La Geolocalisation Des Mobiles Cas de DoualamohamadouNoch keine Bewertungen
- Le GpsDokument14 SeitenLe GpsAbdou Super100% (1)
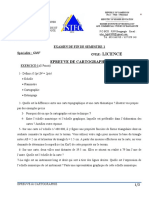
- Cartographie Licence Sujet ExamenDokument3 SeitenCartographie Licence Sujet ExamenPatrick Steve Simo100% (3)
- Localisation Par Satellites: Le Systeme GPS: LUBAC BertrandDokument34 SeitenLocalisation Par Satellites: Le Systeme GPS: LUBAC BertrandManda Tsilavina RajoelisonNoch keine Bewertungen
- Mémoire Final Adda&Zaiout 2017Dokument84 SeitenMémoire Final Adda&Zaiout 2017faresNoch keine Bewertungen
- Cours Exposé GPSDokument20 SeitenCours Exposé GPSsmira1278% (9)
- Topographie Bac 2Dokument110 SeitenTopographie Bac 2Magloire KajidNoch keine Bewertungen
- Radio Navigation MaritimeDokument18 SeitenRadio Navigation MaritimeJoumana LidyaNoch keine Bewertungen
- Chap4 - Les Systèmes de Radionavigation Par SatelliteDokument32 SeitenChap4 - Les Systèmes de Radionavigation Par Satellitesamba amidou maîgaNoch keine Bewertungen
- Aidouni 210Dokument12 SeitenAidouni 210merzak seghirNoch keine Bewertungen
- Cours - Initiation - Relevés GPS - IUA - 2019-2020Dokument17 SeitenCours - Initiation - Relevés GPS - IUA - 2019-2020Effata KouadioNoch keine Bewertungen
- Gps MohamedDokument14 SeitenGps MohamedHicham ChttaouNoch keine Bewertungen
- Projet GéodésieDokument20 SeitenProjet GéodésieRichard Kpakpa SogloNoch keine Bewertungen
- Techniques de Mesure Des Paramètres Atmosphériques Avec GPS Pour L'évaluation Des Changements ClimatiquesDokument71 SeitenTechniques de Mesure Des Paramètres Atmosphériques Avec GPS Pour L'évaluation Des Changements Climatiqueshocine230100% (1)
- GPS Global Positioning SystemDokument51 SeitenGPS Global Positioning SystemAmine Mak KabtniNoch keine Bewertungen
- Instruction GPSDokument0 SeitenInstruction GPSHimou HimoNoch keine Bewertungen
- OUSSAMA AMRICHE - GPSDokument27 SeitenOUSSAMA AMRICHE - GPSchbanimoaad11112003Noch keine Bewertungen
- Chapitre 2 GNSSDokument21 SeitenChapitre 2 GNSSNarimen Boudilmi100% (1)
- Expose Geddesie SpatialeDokument7 SeitenExpose Geddesie SpatialeDon Prévu IbambiNoch keine Bewertungen
- RNAEV 2019 - Concepts - GNSS v1.1Dokument53 SeitenRNAEV 2019 - Concepts - GNSS v1.1Options TransitNoch keine Bewertungen
- Global Positioning System - WikDokument5 SeitenGlobal Positioning System - Wikmerzak seghirNoch keine Bewertungen
- GeopositionnementDokument32 SeitenGeopositionnementJordani MikeNoch keine Bewertungen
- SommaireDokument56 SeitenSommaireLouis Marie DjomaleuNoch keine Bewertungen
- FGF2019 TR2 DiogoyeDokument11 SeitenFGF2019 TR2 DiogoyeCheikhtihiesNoch keine Bewertungen
- ING 3 GNSS (1)Dokument92 SeitenING 3 GNSS (1)Fabiol TchiffoNoch keine Bewertungen
- Chapitre 2Dokument31 SeitenChapitre 2samba amidou maîgaNoch keine Bewertungen
- 05 CH1 LAHAYE Gnss PDFDokument10 Seiten05 CH1 LAHAYE Gnss PDFMEKONGO ESSO OSCARNoch keine Bewertungen
- Topographie CatalogueDokument44 SeitenTopographie CatalogueAmine KiratNoch keine Bewertungen
- Partie 5 - GPS 2015Dokument15 SeitenPartie 5 - GPS 2015Aboubakar BabaNoch keine Bewertungen
- 2 - GNSS & SbasDokument76 Seiten2 - GNSS & SbasBoub SeghirNoch keine Bewertungen
- Rapport Projet GNSS - Equation D'observation Et Des Algorithmes de Positionnement GNSS - Groupe 4Dokument16 SeitenRapport Projet GNSS - Equation D'observation Et Des Algorithmes de Positionnement GNSS - Groupe 4William NNoch keine Bewertungen
- GNSS RtklibDokument46 SeitenGNSS Rtklibdjiby ama ndiaye100% (2)
- Principe GPSDokument28 SeitenPrincipe GPSabdoulaziz.dieyeNoch keine Bewertungen
- Chap4 - Les Systèmes de Radionavigation Par SatelliteDokument32 SeitenChap4 - Les Systèmes de Radionavigation Par Satellitesamba amidou maîgaNoch keine Bewertungen
- Support de Cours Formation GPS Etrex AutoGéoDokument26 SeitenSupport de Cours Formation GPS Etrex AutoGéoMahé Franck Marcel Guéi100% (3)
- GeolocationDokument32 SeitenGeolocationlamour frantzNoch keine Bewertungen
- Systèmes de Navigation (GPS / Galileo, Etc... Global Positioning SystemDokument2 SeitenSystèmes de Navigation (GPS / Galileo, Etc... Global Positioning SystemTib DAVYNoch keine Bewertungen
- Questionnaire Sur La Simulation Numérique MinesDokument2 SeitenQuestionnaire Sur La Simulation Numérique MinesCamara OumarNoch keine Bewertungen
- Cours GPS PDFDokument82 SeitenCours GPS PDFYayou Mareme100% (1)
- Chap 4 GéolocalisationDokument26 SeitenChap 4 GéolocalisationGabin Kenny de Manuel TRIGONoch keine Bewertungen
- Chapitre1 GNSSDokument29 SeitenChapitre1 GNSSAmiri NeylaNoch keine Bewertungen
- Expose de GPSDokument10 SeitenExpose de GPSbilal SABOHNoch keine Bewertungen
- Le GPS Différentiel (DGPS) Et Temps Réel (GPS RTK)Dokument6 SeitenLe GPS Différentiel (DGPS) Et Temps Réel (GPS RTK)Wadh MisNoch keine Bewertungen
- Cours GPS Global Positioning SystemDokument64 SeitenCours GPS Global Positioning System067595134100% (1)
- @cours Licence GPSDokument17 Seiten@cours Licence GPSLPO LEHECNoch keine Bewertungen
- ExposeDokument11 SeitenExposeOusmane Aidara DIOUFNoch keine Bewertungen
- PaolaDokument6 SeitenPaolaPaola DjeugaNoch keine Bewertungen
- Prèsenter Par:: Groupe: G32Dokument12 SeitenPrèsenter Par:: Groupe: G32Islem SebianeNoch keine Bewertungen
- Topographie MarocDokument14 SeitenTopographie MarocZakariya Bsraoui100% (1)
- TCPGPS FRDokument5 SeitenTCPGPS FRHicham ChttaouNoch keine Bewertungen
- Geomatique - Localisation Par SatélliteDokument24 SeitenGeomatique - Localisation Par Satéllitekabebern100% (1)
- Le Système GPS: SommaireDokument16 SeitenLe Système GPS: SommaireBadr Afindi100% (1)
- Informe Geodesico Serpentin de Pasamayo Rev - ADokument22 SeitenInforme Geodesico Serpentin de Pasamayo Rev - Avictor qNoch keine Bewertungen
- Exposé GPSDokument5 SeitenExposé GPSThe AlgerianmanNoch keine Bewertungen
- Aymen ChelaghmaDokument9 SeitenAymen ChelaghmaAymen ChNoch keine Bewertungen
- Notes Cours GPS Partie 1Dokument35 SeitenNotes Cours GPS Partie 1Aboubakar BabaNoch keine Bewertungen
- AcronymesDokument3 SeitenAcronymesBadre OuzougarNoch keine Bewertungen
- Exposé Sur GPSDokument9 SeitenExposé Sur GPSsimoarbia76Noch keine Bewertungen
- Amine GUISOUS Mémoire Fin D'étudeDokument135 SeitenAmine GUISOUS Mémoire Fin D'étudeGUISSOUS AmineNoch keine Bewertungen
- Compte-Rendu Du TP de TopographieDokument13 SeitenCompte-Rendu Du TP de TopographieouthmanNoch keine Bewertungen
- TopoDokument2 SeitenTopoanouar bennacerNoch keine Bewertungen
- SIG PartieI GUERMAZI PDFDokument54 SeitenSIG PartieI GUERMAZI PDFHsen MacheyNoch keine Bewertungen
- Nivellement Par Cheminement CopieDokument15 SeitenNivellement Par Cheminement CopieWael TimoumiNoch keine Bewertungen
- Fiche PDSTE232Dokument3 SeitenFiche PDSTE232Mohamed Amine ZaidiNoch keine Bewertungen
- Projet de Topographie 2009Dokument19 SeitenProjet de Topographie 2009Hanane BenGamraNoch keine Bewertungen
- Fiche de TP Nivellement DirectDokument1 SeiteFiche de TP Nivellement DirectALON?TSIE TANEZOUA ISRAELNoch keine Bewertungen
- Interrogation GPSDokument4 SeitenInterrogation GPSAnonymous PKdzRZ7Noch keine Bewertungen
- Notes de Cours-Gravimetrie PDFDokument118 SeitenNotes de Cours-Gravimetrie PDFRoseNoch keine Bewertungen
- Cours Topographie GeodesyDokument39 SeitenCours Topographie GeodesyFara TallNoch keine Bewertungen
- Quand Les Technologies Font Leur Révolution (Article Le MAG Culture) 2006Dokument4 SeitenQuand Les Technologies Font Leur Révolution (Article Le MAG Culture) 2006benefredNoch keine Bewertungen
- Cadrans Solaires-Version FinaleDokument71 SeitenCadrans Solaires-Version FinaleSalma SIRAJ-SANINoch keine Bewertungen
- Topographie - Nivellement Par RayonnementDokument1 SeiteTopographie - Nivellement Par Rayonnementibouzi50% (2)
- Article 410907Dokument5 SeitenArticle 410907Fares BelkalemNoch keine Bewertungen
- TD GravimetrieDokument7 SeitenTD Gravimetriemkq4p6f8whNoch keine Bewertungen
- Chp4 AnglesDokument22 SeitenChp4 Anglesmamado0% (1)
- Les Coordonnées GéographiquesDokument2 SeitenLes Coordonnées GéographiquesCheikh SohibouNoch keine Bewertungen
- Topographie - ROUTE DefDokument188 SeitenTopographie - ROUTE Defamroumzghizlane493Noch keine Bewertungen
- Article 412907Dokument4 SeitenArticle 412907Har mc2Noch keine Bewertungen
- Coordonnées GPS - Latitude Et Longitude, ConvertisseurDokument3 SeitenCoordonnées GPS - Latitude Et Longitude, ConvertisseurdolisieNoch keine Bewertungen
- BUSHABUDokument18 SeitenBUSHABUDanny Kamandi100% (1)
- TD GravimetrieDokument2 SeitenTD GravimetrieElyas CamusNoch keine Bewertungen
- Mode Operatoire D'un Lever D'un Terrain - RechercDokument1 SeiteMode Operatoire D'un Lever D'un Terrain - Recherckjvxgn7xm2Noch keine Bewertungen
- Topo 1Dokument37 SeitenTopo 1idomNoch keine Bewertungen
- Module 1 Avec 62sDokument68 SeitenModule 1 Avec 62sGEO SIGMA0% (1)
- Chapitre 2 PDFDokument14 SeitenChapitre 2 PDFelhoucineNoch keine Bewertungen