Das könnte Ihnen auch gefallen
- Real-Time Simulation Technology for Modern Power ElectronicsVon EverandReal-Time Simulation Technology for Modern Power ElectronicsNoch keine Bewertungen
- Knowledge is "Real Power": Introduction to Power QualityVon EverandKnowledge is "Real Power": Introduction to Power QualityNoch keine Bewertungen
- 09 Dynamic StabilityDokument36 Seiten09 Dynamic StabilitymentongNoch keine Bewertungen
- Reactive Power-Voltage Control of IBRDokument22 SeitenReactive Power-Voltage Control of IBRLuis José RodríguezNoch keine Bewertungen
- Earth Potential Rise ManualDokument25 SeitenEarth Potential Rise Manualparas99Noch keine Bewertungen
- StudyDokument87 SeitenStudymazzoffaNoch keine Bewertungen
- ETAp-Dynamic Models Excitation SystemDokument22 SeitenETAp-Dynamic Models Excitation SystemK.RamachandranNoch keine Bewertungen
- Whitepaper DC CouplingDokument4 SeitenWhitepaper DC CouplingFernanda Palma0% (1)
- Utility Scale Electrical Energy Storage Systems: Julio C. RimadaDokument12 SeitenUtility Scale Electrical Energy Storage Systems: Julio C. RimadaJulio Cesar Rimada HerreraNoch keine Bewertungen
- Iecen 62040 1 2Dokument11 SeitenIecen 62040 1 2pravinuntooNoch keine Bewertungen
- PRM DesignGuideComplete v1Dokument257 SeitenPRM DesignGuideComplete v1Sunil SinghNoch keine Bewertungen
- Creating Dynamics User Model Dynamic Linked Library (DLL) For Various PSS E VersionsDokument5 SeitenCreating Dynamics User Model Dynamic Linked Library (DLL) For Various PSS E Versions98_kingsuk100% (1)
- Optimum Location and Size of Capacitor Bank in Distribution SystemDokument10 SeitenOptimum Location and Size of Capacitor Bank in Distribution SystemsurajNoch keine Bewertungen
- Eskom's Flagship BESS Project - Rev1Dokument7 SeitenEskom's Flagship BESS Project - Rev1princeNoch keine Bewertungen
- STATCOMDokument5 SeitenSTATCOMVenkateshNoch keine Bewertungen
- Emergency and Cyclic Ratings of HV Cables: Ii. T R CDokument6 SeitenEmergency and Cyclic Ratings of HV Cables: Ii. T R CПавел ПавловNoch keine Bewertungen
- PCS-9611 - X - Instruction Manual - EN - Overseas General - X - R1.00 - (EN - DYBH5301.0086.0001) PDFDokument282 SeitenPCS-9611 - X - Instruction Manual - EN - Overseas General - X - R1.00 - (EN - DYBH5301.0086.0001) PDFngocanhvy100% (1)
- Application Program Interface (API) PSS®E 35.3.0: July 2021Dokument3.777 SeitenApplication Program Interface (API) PSS®E 35.3.0: July 2021Vinay ChoudharyNoch keine Bewertungen
- Aerial Bundled Cables ABCDokument1 SeiteAerial Bundled Cables ABCasankakkadNoch keine Bewertungen
- Location: Project: Date:: Short-Circuit ReportDokument6 SeitenLocation: Project: Date:: Short-Circuit Reportadrian bargasNoch keine Bewertungen
- Power System Analysis: Transformers, Per Unit CalculationsDokument38 SeitenPower System Analysis: Transformers, Per Unit CalculationsShubhankar Pal100% (1)
- Chapter 1 - INTRODUCTIONDokument7 SeitenChapter 1 - INTRODUCTIONMark Loyd ColoniaNoch keine Bewertungen
- VSOP For Unit Synchronization.Dokument15 SeitenVSOP For Unit Synchronization.pradeep1987coolNoch keine Bewertungen
- CAB-15-003 Issue 8 With DrawingsDokument23 SeitenCAB-15-003 Issue 8 With DrawingsmuratucobanNoch keine Bewertungen
- IEEE Standard Performance Characteristics and Dimensions For Outdoor Apparatus BushingsDokument11 SeitenIEEE Standard Performance Characteristics and Dimensions For Outdoor Apparatus BushingsSetia SianiparNoch keine Bewertungen
- XLPE Land Cable Systems - User S GuideDokument28 SeitenXLPE Land Cable Systems - User S GuideJeremy Mcfadden100% (1)
- PEFA - Transient Stability - TransientStabilitymanual - 3-21 PDFDokument138 SeitenPEFA - Transient Stability - TransientStabilitymanual - 3-21 PDFravi474Noch keine Bewertungen
- Reverse Power FlowDokument7 SeitenReverse Power FlowengkankwNoch keine Bewertungen
- UNCC 2013 WorkshopDokument241 SeitenUNCC 2013 WorkshopRicardo HungriaNoch keine Bewertungen
- AGC Dynamic Simulation in PSSEDokument11 SeitenAGC Dynamic Simulation in PSSEAmr KamalNoch keine Bewertungen
- Energex Distribution Earthing ManualDokument42 SeitenEnergex Distribution Earthing ManualdmcalderoncNoch keine Bewertungen
- Company Overview - Elum Energy - Power Plants PDFDokument17 SeitenCompany Overview - Elum Energy - Power Plants PDFCyrilColinNoch keine Bewertungen
- Significance of Tertiary Windings in Y-Y Connected Power TransformersDokument22 SeitenSignificance of Tertiary Windings in Y-Y Connected Power Transformerssadeeskumar.dNoch keine Bewertungen
- Arc Flash Hazard Standards The Burning Question SeshaDokument0 SeitenArc Flash Hazard Standards The Burning Question SeshaFikret VelagicNoch keine Bewertungen
- Etap Validation Cases and Comparison Results: Load FlowDokument68 SeitenEtap Validation Cases and Comparison Results: Load FlowMahfudz FauziNoch keine Bewertungen
- Typical Data For Synchronous Generator PDFDokument1 SeiteTypical Data For Synchronous Generator PDFgilbertomjcNoch keine Bewertungen
- Tutorial - Scenario Manager and Data VisualizerDokument33 SeitenTutorial - Scenario Manager and Data VisualizerCarlos Puerto100% (1)
- Emtp Course Lille Program Web 0Dokument7 SeitenEmtp Course Lille Program Web 0Nasir YahayaNoch keine Bewertungen
- EPE97 CTDokument54 SeitenEPE97 CTTarak BenslimaneNoch keine Bewertungen
- Winigs ReportDokument15 SeitenWinigs ReportkrcdewanewNoch keine Bewertungen
- IEEE Guide For The Protection of Shunt Reactors: IEEE Power Engineering SocietyDokument39 SeitenIEEE Guide For The Protection of Shunt Reactors: IEEE Power Engineering Societyruben alejandro TeranNoch keine Bewertungen
- Application of Synchrophasor Technology For Wide Area Measurement SystemDokument56 SeitenApplication of Synchrophasor Technology For Wide Area Measurement SystemHimanshu LashkariNoch keine Bewertungen
- Short Circuit Contribution From PV Power Plants PDFDokument15 SeitenShort Circuit Contribution From PV Power Plants PDFChalitha Kanchana100% (1)
- Digsilent GeneralDokument1 SeiteDigsilent GeneralAnushya JesusNoch keine Bewertungen
- Digsilent Powerfactory: Technical Reference DocumentationDokument39 SeitenDigsilent Powerfactory: Technical Reference DocumentationROYNoch keine Bewertungen
- MV Soft Starter Switchgear SpecificationDokument10 SeitenMV Soft Starter Switchgear SpecificationjcvillablNoch keine Bewertungen
- Optimal Placement of SVC and Statcom For Voltage Stability Enhancement Under Contingency Using Cat Swarm OptimizationDokument12 SeitenOptimal Placement of SVC and Statcom For Voltage Stability Enhancement Under Contingency Using Cat Swarm OptimizationIJAET JournalNoch keine Bewertungen
- Neutral GroundingDokument9 SeitenNeutral Groundingmspd2003Noch keine Bewertungen
- CSC-103 Line Protection IED Technical Application Manual (0SF.451.083E) - V1.02Dokument392 SeitenCSC-103 Line Protection IED Technical Application Manual (0SF.451.083E) - V1.02duonzaNoch keine Bewertungen
- KMS-0033 Fusesaver Operating Instructions 151216Dokument123 SeitenKMS-0033 Fusesaver Operating Instructions 151216jean alvesNoch keine Bewertungen
- HB 264-2003 Power Quality - Recommendations For The Application of As NZS 61000.3.6 and As NZS 61000.3.7Dokument7 SeitenHB 264-2003 Power Quality - Recommendations For The Application of As NZS 61000.3.6 and As NZS 61000.3.7SAI Global - APACNoch keine Bewertungen
- IEEE P1547 StandardDocument PDFDokument138 SeitenIEEE P1547 StandardDocument PDFAbhijitKshirsagarNoch keine Bewertungen
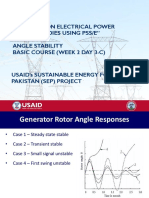
- W-2-Day-3-C - Angle StabilityDokument17 SeitenW-2-Day-3-C - Angle StabilityKASHIFNoch keine Bewertungen
- Willis.P PowerFactory ProtModelsDokument16 SeitenWillis.P PowerFactory ProtModelsAndrewcaesarNoch keine Bewertungen
- Integration of Green and Renewable Energy in Electric Power SystemsVon EverandIntegration of Green and Renewable Energy in Electric Power SystemsNoch keine Bewertungen
- Current Interruption Transients CalculationVon EverandCurrent Interruption Transients CalculationBewertung: 4 von 5 Sternen4/5 (1)
- 3D Photovoltaic Devices Complete Self-Assessment GuideVon Everand3D Photovoltaic Devices Complete Self-Assessment GuideNoch keine Bewertungen
- Access Standard Assessment Guide 20190131Dokument36 SeitenAccess Standard Assessment Guide 20190131sykimk8921Noch keine Bewertungen
- Generator Performance Guideline: 16 September 2019Dokument51 SeitenGenerator Performance Guideline: 16 September 2019sykimk8921Noch keine Bewertungen
- WECC Battery Storage Guideline Updates - Bo 4-5-17 SLT 4-7-17 XX SCDokument38 SeitenWECC Battery Storage Guideline Updates - Bo 4-5-17 SLT 4-7-17 XX SCsykimk8921Noch keine Bewertungen
- TCM18 DCS Communication Guide (4385)Dokument20 SeitenTCM18 DCS Communication Guide (4385)sykimk8921Noch keine Bewertungen
- Final Report AEMO System Incident Investigation Report 20151112Dokument21 SeitenFinal Report AEMO System Incident Investigation Report 20151112sykimk8921Noch keine Bewertungen
- 35kV Rear Wall Installation ManualDokument9 Seiten35kV Rear Wall Installation Manualsykimk8921Noch keine Bewertungen
- Name: File Path: Start Time: Sample Rate: Value Representation: Secondary Record TypeDokument3 SeitenName: File Path: Start Time: Sample Rate: Value Representation: Secondary Record Typesykimk8921Noch keine Bewertungen
- TPRO - 87T - 3 Winding 3 Phase - Trip TestDokument40 SeitenTPRO - 87T - 3 Winding 3 Phase - Trip Testsykimk8921Noch keine Bewertungen
- Basic Instructions To Use These Spreadsheets For B-PRO Differential Three Phase Slope TestDokument15 SeitenBasic Instructions To Use These Spreadsheets For B-PRO Differential Three Phase Slope Testsykimk8921Noch keine Bewertungen
- 67B Graphical Representation (Forward Direction) : SettingsDokument11 Seiten67B Graphical Representation (Forward Direction) : Settingssykimk8921Noch keine Bewertungen
- T PRO 67T Graphical RepresentationDokument11 SeitenT PRO 67T Graphical Representationsykimk8921Noch keine Bewertungen
- Ijert Ijert: Performance Comparison of A VSI and A CSI Using MATLAB/SIMULINKDokument7 SeitenIjert Ijert: Performance Comparison of A VSI and A CSI Using MATLAB/SIMULINKsykimk8921Noch keine Bewertungen
- Easy Method For Testing Transformer Differential Relays: September 2009Dokument15 SeitenEasy Method For Testing Transformer Differential Relays: September 2009sykimk8921Noch keine Bewertungen
- Sinamics Perfect Harmony Gh150 Cellbased Drive Brochure en 2017Dokument14 SeitenSinamics Perfect Harmony Gh150 Cellbased Drive Brochure en 2017sykimk8921Noch keine Bewertungen
- Poster MV Drives Drives For Every Demand 2017 enDokument24 SeitenPoster MV Drives Drives For Every Demand 2017 ensykimk8921Noch keine Bewertungen
- NERC System Protection and Control Subcommittee SPCS 20 SAMS-SPCS SPS Technic 02182014Dokument48 SeitenNERC System Protection and Control Subcommittee SPCS 20 SAMS-SPCS SPS Technic 02182014sykimk8921Noch keine Bewertungen
- Ws Sinamics Gl150 enDokument16 SeitenWs Sinamics Gl150 ensykimk8921Noch keine Bewertungen
- Sinamics Sm120 CM enDokument2 SeitenSinamics Sm120 CM ensykimk8921Noch keine Bewertungen
- Ws Sinamics Gl150 enDokument16 SeitenWs Sinamics Gl150 ensykimk8921Noch keine Bewertungen
- Sinamics Perfect Harmony enDokument16 SeitenSinamics Perfect Harmony ensykimk8921Noch keine Bewertungen
- Sinamics Sl150 Mining enDokument10 SeitenSinamics Sl150 Mining ensykimk8921Noch keine Bewertungen
- The Effects of Pressure On Boiling Point Temperatures: Example: Water at 5,280 Feet Will Boil at A Mere 203° FDokument1 SeiteThe Effects of Pressure On Boiling Point Temperatures: Example: Water at 5,280 Feet Will Boil at A Mere 203° FHisanNoch keine Bewertungen
- Unit 7 Science TestDokument4 SeitenUnit 7 Science Testapi-404448001Noch keine Bewertungen
- Lecture 22Dokument13 SeitenLecture 22I190845 Samana NayyabNoch keine Bewertungen
- Aerodynamics Lab 2 - Airfoil Pressure MeasurementsDokument14 SeitenAerodynamics Lab 2 - Airfoil Pressure MeasurementsDavid Clark100% (3)
- ASTM E-1965-98 (2003) Especificación Estándar para Termómetros Infrarrojos para La Determinación Intermitente de La Temperatura Del PacienteDokument17 SeitenASTM E-1965-98 (2003) Especificación Estándar para Termómetros Infrarrojos para La Determinación Intermitente de La Temperatura Del PacienteLucio ArmasNoch keine Bewertungen
- WAZ5 PRO RTD enDokument4 SeitenWAZ5 PRO RTD enjack2012scribdNoch keine Bewertungen
- High Voltage Engg r13 Mtech PDFDokument24 SeitenHigh Voltage Engg r13 Mtech PDFSal ExcelNoch keine Bewertungen
- Gradient & Area Under The GraphDokument6 SeitenGradient & Area Under The GraphLoh Chee WeiNoch keine Bewertungen
- Low Power VLSI Chip Design: Circuit Design TechniquesDokument13 SeitenLow Power VLSI Chip Design: Circuit Design TechniquesNaveen SilveriNoch keine Bewertungen
- Microstrip Resonator-POZARDokument13 SeitenMicrostrip Resonator-POZARPrabhu Prasad BiswalNoch keine Bewertungen
- 3M™ Cold Shrink QT-III SiliconeDokument11 Seiten3M™ Cold Shrink QT-III SiliconeDaniel RemacheNoch keine Bewertungen
- Application of Conformal Mapping For ElectromagneticDokument21 SeitenApplication of Conformal Mapping For ElectromagneticBrown MountainNoch keine Bewertungen
- 10 RO - General Physics 1 - Grade 12 - Q1 - LP 10Dokument10 Seiten10 RO - General Physics 1 - Grade 12 - Q1 - LP 10Hector Panti100% (2)
- Optimization of An Indirect Heating Process For Food Uids Through The Combined Use of CFD and Response Surface MethodologyDokument17 SeitenOptimization of An Indirect Heating Process For Food Uids Through The Combined Use of CFD and Response Surface MethodologyTamires OishiNoch keine Bewertungen
- Charging and Discharging of Capacitor (P)Dokument20 SeitenCharging and Discharging of Capacitor (P)X B sᴀʀᴛʜᴀᴋ 18Noch keine Bewertungen
- Module 1 - Basic Principles of Turbo MachinesDokument12 SeitenModule 1 - Basic Principles of Turbo Machinesnagendrags100% (1)
- Hydraulics - King Wisler & WoodburnDokument181 SeitenHydraulics - King Wisler & WoodburnJen Montemayor100% (9)
- R & AC Important Questions: Iv Me, I SemDokument17 SeitenR & AC Important Questions: Iv Me, I Semapi-362935264100% (1)
- Question Bank (MCQS) : Q, Then It Would Result in Grashof's Linkage Provided ThatDokument5 SeitenQuestion Bank (MCQS) : Q, Then It Would Result in Grashof's Linkage Provided ThatPrasad Govind KumbharNoch keine Bewertungen
- Spring Coefficient CalculationDokument8 SeitenSpring Coefficient CalculationamirNoch keine Bewertungen
- Sizing and Performance of Safety Valve Relief Systems For Two-Phase FlowDokument56 SeitenSizing and Performance of Safety Valve Relief Systems For Two-Phase FlowAGP100% (1)
- Wind Tunnels Design Construction, Types and Usage Limitations ChaplinDokument165 SeitenWind Tunnels Design Construction, Types and Usage Limitations ChaplinSayed NagdyNoch keine Bewertungen
- Applied Mechanics PDFDokument18 SeitenApplied Mechanics PDFSrinivas KandukuriNoch keine Bewertungen
- Manajemen Energi Motor ListrikDokument23 SeitenManajemen Energi Motor ListrikJHOSA EITFA ALTISNoch keine Bewertungen
- Overview of ECBC and Model Rules in India Saurrabh DiddiDokument12 SeitenOverview of ECBC and Model Rules in India Saurrabh DiddiHimanshi guptaNoch keine Bewertungen
- BS6195 Type 4 CurrentDokument1 SeiteBS6195 Type 4 CurrentStone123456789Noch keine Bewertungen
- Motor Shaft Voltages & Bearing CurrentsDokument6 SeitenMotor Shaft Voltages & Bearing CurrentsJibjab7Noch keine Bewertungen
- General Physics 2module 5 and 6Dokument17 SeitenGeneral Physics 2module 5 and 6RENDIE C. BEDOLIDONoch keine Bewertungen
- Analisis Kenyamanan Dan Kestabilan Kendaraan Roda Dua Dalam Tinjauan Satu Derajat KebebasanDokument6 SeitenAnalisis Kenyamanan Dan Kestabilan Kendaraan Roda Dua Dalam Tinjauan Satu Derajat KebebasanRoi HbbNoch keine Bewertungen
- Room Pressurization Control Methods SiemensDokument8 SeitenRoom Pressurization Control Methods SiemensHari Babu Dharmavarapu100% (2)