Das könnte Ihnen auch gefallen
- Computational Strategy: One ApproachDokument4 SeitenComputational Strategy: One ApproachItsy BitsyNoch keine Bewertungen
- From Wire Segments To RC Tree: Big Idea: Replace Straight Wire Segment WithDokument4 SeitenFrom Wire Segments To RC Tree: Big Idea: Replace Straight Wire Segment WithItsy BitsyNoch keine Bewertungen
- Elmore Delay : Tree Walk Computing Recipe: Do ThisDokument4 SeitenElmore Delay : Tree Walk Computing Recipe: Do ThisItsy BitsyNoch keine Bewertungen
- How To Compute Rats? Recursively: - P - S ClockDokument4 SeitenHow To Compute Rats? Recursively: - P - S ClockItsy BitsyNoch keine Bewertungen
- Circuits Aside: What Is Elmore Delay?Dokument4 SeitenCircuits Aside: What Is Elmore Delay?Itsy BitsyNoch keine Bewertungen
- Vlsi Cad:: Logic To LayoutDokument4 SeitenVlsi Cad:: Logic To LayoutItsy BitsyNoch keine Bewertungen
- Worst Case Path Reporting: Example: Expand, Reach, ReachDokument4 SeitenWorst Case Path Reporting: Example: Expand, Reach, ReachItsy BitsyNoch keine Bewertungen
- This Is It: RC TreeDokument4 SeitenThis Is It: RC TreeItsy BitsyNoch keine Bewertungen
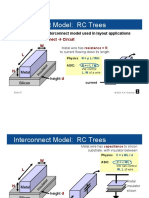
- Interconnect Model: RC Trees: Most Popular Interconnect Model Used in Layout Applications FirstDokument4 SeitenInterconnect Model: RC Trees: Most Popular Interconnect Model Used in Layout Applications FirstItsy BitsyNoch keine Bewertungen
- Using Slack For Path Reporting: Useful Slack Property: All Nodes On Longest Path HaveDokument4 SeitenUsing Slack For Path Reporting: Useful Slack Property: All Nodes On Longest Path HaveItsy BitsyNoch keine Bewertungen
- Analyzing This Example: Look at ThoseDokument4 SeitenAnalyzing This Example: Look at ThoseItsy BitsyNoch keine Bewertungen
- Elmore Example: RC Tree For The Interconnect AloneDokument4 SeitenElmore Example: RC Tree For The Interconnect AloneItsy BitsyNoch keine Bewertungen
- 11-Vlsicad-Route PDFDokument98 Seiten11-Vlsicad-Route PDFItsy BitsyNoch keine Bewertungen
- Let's Do A Bigger Example: Delays Are On Edges Let Clock Cycle BeDokument4 SeitenLet's Do A Bigger Example: Delays Are On Edges Let Clock Cycle BeItsy BitsyNoch keine Bewertungen
- 11 Vlsicad Route 49 PDFDokument2 Seiten11 Vlsicad Route 49 PDFItsy BitsyNoch keine Bewertungen
- 11 Vlsicad Route 47 PDFDokument2 Seiten11 Vlsicad Route 47 PDFItsy BitsyNoch keine Bewertungen
- What Global Routing Does: Makes Sure Overall Wiring Congestion Is ReasonableDokument2 SeitenWhat Global Routing Does: Makes Sure Overall Wiring Congestion Is ReasonableItsy BitsyNoch keine Bewertungen
- 11 Vlsicad Route 43 PDFDokument2 Seiten11 Vlsicad Route 43 PDFItsy BitsyNoch keine Bewertungen
- 11 Vlsicad Route 33 PDFDokument2 Seiten11 Vlsicad Route 33 PDFItsy BitsyNoch keine Bewertungen
- 11 Vlsicad Route 46 PDFDokument2 Seiten11 Vlsicad Route 46 PDFItsy BitsyNoch keine Bewertungen
- 11 Vlsicad Route 40 PDFDokument2 Seiten11 Vlsicad Route 40 PDFItsy BitsyNoch keine Bewertungen
- 11 Vlsicad Route 45 PDFDokument2 Seiten11 Vlsicad Route 45 PDFItsy BitsyNoch keine Bewertungen
- 11 Vlsicad Route 39 PDFDokument2 Seiten11 Vlsicad Route 39 PDFItsy BitsyNoch keine Bewertungen
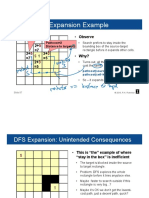
- Depth-First Expansion Example: Observe 2+ 7 2+ 5 2+ 5Dokument2 SeitenDepth-First Expansion Example: Observe 2+ 7 2+ 5 2+ 5Itsy BitsyNoch keine Bewertungen
- 11 Vlsicad Route 41 PDFDokument2 Seiten11 Vlsicad Route 41 PDFItsy BitsyNoch keine Bewertungen
- 11 Vlsicad Route 23 PDFDokument2 Seiten11 Vlsicad Route 23 PDFItsy BitsyNoch keine Bewertungen
- Smarter Search: Maze Search With Predictor: Two Parts: Plain Maze Router Smarter Maze RouterDokument2 SeitenSmarter Search: Maze Search With Predictor: Two Parts: Plain Maze Router Smarter Maze RouterItsy BitsyNoch keine Bewertungen
- 11 Vlsicad Route 38 PDFDokument2 Seiten11 Vlsicad Route 38 PDFItsy BitsyNoch keine Bewertungen
- Plain Maze Routing Revisited: Key AssumptionsDokument2 SeitenPlain Maze Routing Revisited: Key AssumptionsItsy BitsyNoch keine Bewertungen
- 11 Vlsicad Route 35 PDFDokument2 Seiten11 Vlsicad Route 35 PDFItsy BitsyNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Humidity & Temperature Datalogger: Model RHT20Dokument5 SeitenHumidity & Temperature Datalogger: Model RHT20Calibration Abu DhabiNoch keine Bewertungen
- Philips+Chassis+TPM18 6LDokument90 SeitenPhilips+Chassis+TPM18 6LJackson FerreiraNoch keine Bewertungen
- Interference Cancellation System Design Using GNU Radio: by Jan Paolo AcostaDokument24 SeitenInterference Cancellation System Design Using GNU Radio: by Jan Paolo AcostaartovolastiNoch keine Bewertungen
- Generator Governor Frequency Response Webinar April 2015Dokument31 SeitenGenerator Governor Frequency Response Webinar April 2015Jeans GonzalezNoch keine Bewertungen
- Jabra A120s User ManualDokument51 SeitenJabra A120s User Manualapi-26157899Noch keine Bewertungen
- SA100 V 14 BulletinDokument8 SeitenSA100 V 14 BulletinTeepoonsab somsaiNoch keine Bewertungen
- DSP Simulation Assignment Using OctaveDokument33 SeitenDSP Simulation Assignment Using Octaveapi-19320842Noch keine Bewertungen
- Literature Review of Electric Arc Welding MachineDokument4 SeitenLiterature Review of Electric Arc Welding MachineafmzxutkxdkdamNoch keine Bewertungen
- Chapter 8 State Space AnalysisDokument22 SeitenChapter 8 State Space AnalysisAli AhmadNoch keine Bewertungen
- Safemine Cas 2011Dokument56 SeitenSafemine Cas 2011DEEPAK GOYALNoch keine Bewertungen
- Pre Installation Lab Requirements: (For Arl XRF 9900 Intellipower Series Spectrometer - 1200W)Dokument3 SeitenPre Installation Lab Requirements: (For Arl XRF 9900 Intellipower Series Spectrometer - 1200W)saji kumarNoch keine Bewertungen
- Mv185whb-N10-Etc 19m38aDokument26 SeitenMv185whb-N10-Etc 19m38acarlos alberto hermidaNoch keine Bewertungen
- Basic Radio HandlingDokument26 SeitenBasic Radio HandlingVlademir Geb Dubouzet100% (1)
- FD-X Series: IO-Link Instruction ManualDokument8 SeitenFD-X Series: IO-Link Instruction ManualJenny Gonzalo MadrigalNoch keine Bewertungen
- Electrical O&M ManualDokument28 SeitenElectrical O&M ManualSopsky SalatNoch keine Bewertungen
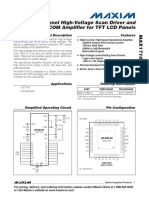
- 10-Channel High-Voltage Scan Driver and VCOM Amplifier For TFT LCD PanelsDokument10 Seiten10-Channel High-Voltage Scan Driver and VCOM Amplifier For TFT LCD PanelsVinicius MarcosNoch keine Bewertungen
- NEMA23 Closed Loop Stepper MotorDokument3 SeitenNEMA23 Closed Loop Stepper MotorGaurav MahajanNoch keine Bewertungen
- 8 isolated DC output module with optical isolation and diode protectionDokument1 Seite8 isolated DC output module with optical isolation and diode protectionDelshad DuhokiNoch keine Bewertungen
- Actuadores Electrohidraulicos PDFDokument6 SeitenActuadores Electrohidraulicos PDFJorge ArimanaNoch keine Bewertungen
- Roubik Gregorian-Introduction To CMOS OP-AMPs and Comparators-Wiley (1999)Dokument369 SeitenRoubik Gregorian-Introduction To CMOS OP-AMPs and Comparators-Wiley (1999)Maanas Khurana50% (2)
- VHF FM Handheld Transceiver: 144 MHZ, Ultra-Rugged, 5 Watts!Dokument2 SeitenVHF FM Handheld Transceiver: 144 MHZ, Ultra-Rugged, 5 Watts!Jc Sevillano AlejandroNoch keine Bewertungen
- 6 16Dokument2 Seiten6 16Indira KarimovaNoch keine Bewertungen
- DM CBL 8g PDokument2 SeitenDM CBL 8g Pfaruk604Noch keine Bewertungen
- Tonepad - Rangemaster Brian May Treble BoosterDokument1 SeiteTonepad - Rangemaster Brian May Treble BoosterBastiaoNoch keine Bewertungen
- Aalim Muhammed Salegh College of Engineering Digital Systems Design Lab RecordDokument67 SeitenAalim Muhammed Salegh College of Engineering Digital Systems Design Lab Recordaafreen sadakNoch keine Bewertungen
- Lesson 6 Connection of Field WindingDokument26 SeitenLesson 6 Connection of Field WindingGleden Umayam33% (3)
- Beko TV LCD 14-20 Chassis LCDokument33 SeitenBeko TV LCD 14-20 Chassis LCwajkNoch keine Bewertungen
- Total StationDokument2 SeitenTotal StationrahoznawrozNoch keine Bewertungen
- Cartao Analogico PDFDokument28 SeitenCartao Analogico PDFFernandoCamargoNoch keine Bewertungen