Das könnte Ihnen auch gefallen
- Fourier Analysis of Signals and SystemsDokument24 SeitenFourier Analysis of Signals and SystemsBabul IslamNoch keine Bewertungen
- New Paradigms in Computational Modeling and Its ApplicationsVon EverandNew Paradigms in Computational Modeling and Its ApplicationsNoch keine Bewertungen
- Classification-of-Signals-Systems Unit1Dokument59 SeitenClassification-of-Signals-Systems Unit1Durgarao Nagayalanka0% (1)
- Dynamical Systems Method for Solving Nonlinear Operator EquationsVon EverandDynamical Systems Method for Solving Nonlinear Operator EquationsBewertung: 5 von 5 Sternen5/5 (1)
- MOS Capacitors PDFDokument17 SeitenMOS Capacitors PDFTejinder SinghNoch keine Bewertungen
- Linear Convolution Using GUIDokument19 SeitenLinear Convolution Using GUIRamya R Mallya0% (1)
- Digital Signal Processing NotesDokument18 SeitenDigital Signal Processing NotesDanial ZamanNoch keine Bewertungen
- Practical Signal ProcessingDokument30 SeitenPractical Signal ProcessingLokender TiwariNoch keine Bewertungen
- DSP Lab ManualDokument54 SeitenDSP Lab Manualkpsvenu100% (1)
- DC Notes PDFDokument151 SeitenDC Notes PDFSharland GodinhoNoch keine Bewertungen
- Advanced Digital Communication Systems Spectral DensityDokument24 SeitenAdvanced Digital Communication Systems Spectral DensityatifNoch keine Bewertungen
- Why DSP is ImportantDokument54 SeitenWhy DSP is Importantshivam vashistNoch keine Bewertungen
- To Design An Adaptive Channel Equalizer Using MATLABDokument43 SeitenTo Design An Adaptive Channel Equalizer Using MATLABAngel Pushpa100% (1)
- MOSFET Small-Signal Analysis StepsDokument7 SeitenMOSFET Small-Signal Analysis Stepsfrank wangNoch keine Bewertungen
- Unit 2 - CMOS Logic, Fabrication and LayoutDokument34 SeitenUnit 2 - CMOS Logic, Fabrication and LayoutphillipNoch keine Bewertungen
- DSPDokument94 SeitenDSPRasha Hassan0% (1)
- ECE411 - 2 - DT Signals and SystemsDokument12 SeitenECE411 - 2 - DT Signals and SystemsMartine JimenezNoch keine Bewertungen
- 6-A Prediction ProblemDokument31 Seiten6-A Prediction ProblemPrabhjot KhuranaNoch keine Bewertungen
- Pulse Amplitude ModulationDokument86 SeitenPulse Amplitude ModulationPraful Jagtap100% (1)
- Digital Signal Processing NotesDokument12 SeitenDigital Signal Processing NotesDanial ZamanNoch keine Bewertungen
- Ch4 Amplitude ModulationDokument55 SeitenCh4 Amplitude ModulationsrijanNoch keine Bewertungen
- Scope Fundamentals For EE StudentsDokument29 SeitenScope Fundamentals For EE StudentsAugustin GireadaNoch keine Bewertungen
- Levinson and Durbin AlgorithmDokument4 SeitenLevinson and Durbin AlgorithmPrathmesh P SakhadeoNoch keine Bewertungen
- Bellman FordDokument4 SeitenBellman Fordacharya_s2005100% (1)
- Signals and SystemsDokument30 SeitenSignals and SystemsMohammad Gulam Ahamad100% (3)
- Z TransformDokument21 SeitenZ Transformadil1122100% (3)
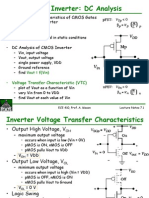
- CMOS Inverter: DC AnalysisDokument32 SeitenCMOS Inverter: DC Analysissreekanthreddy peram50% (2)
- Design, Simulate and Approximate Parallel Coupled Microstrip Bandpass Filter at 2.4 GHZDokument5 SeitenDesign, Simulate and Approximate Parallel Coupled Microstrip Bandpass Filter at 2.4 GHZNabil DakhliNoch keine Bewertungen
- Signals and Systems GATE QuestionsDokument55 SeitenSignals and Systems GATE QuestionsdileepanmeNoch keine Bewertungen
- Ch7 FourierTransform Continuous-Time Signal AnalysisDokument43 SeitenCh7 FourierTransform Continuous-Time Signal AnalysisNat RajNoch keine Bewertungen
- Lifted Newton OptimizationDokument60 SeitenLifted Newton OptimizationAndrea SpencerNoch keine Bewertungen
- Mnmjec - Ec6303 Signals & SystemsDokument25 SeitenMnmjec - Ec6303 Signals & SystemsSonuNoch keine Bewertungen
- Sallen Key Low Pass FilterDokument4 SeitenSallen Key Low Pass FilterPhilip Caesar EbitNoch keine Bewertungen
- PCM SamplingDokument11 SeitenPCM SamplingSARAH FAROOQINoch keine Bewertungen
- Diode Equivalent Circuits GuideDokument42 SeitenDiode Equivalent Circuits Guidegirishkumardarisi254Noch keine Bewertungen
- EI Assignment 1 PDFDokument6 SeitenEI Assignment 1 PDFFirozNoch keine Bewertungen
- DC Operating Point at Cadence PDFDokument3 SeitenDC Operating Point at Cadence PDFAhmed Edris100% (1)
- Signals & SystemsDokument106 SeitenSignals & SystemsDhayanandhNoch keine Bewertungen
- Frequency Response Analysis and Design PDFDokument281 SeitenFrequency Response Analysis and Design PDFfergusoniseNoch keine Bewertungen
- CMOS Mixed Signal Circuit Design by Jacob BakerDokument180 SeitenCMOS Mixed Signal Circuit Design by Jacob BakerSharath Sogi0% (1)
- Discrete Fourier Transform (DFT) PairsDokument23 SeitenDiscrete Fourier Transform (DFT) PairsgoutamkrsahooNoch keine Bewertungen
- Laplace TransformDokument277 SeitenLaplace TransformAdHam AverrielNoch keine Bewertungen
- CH 4 B P LathiDokument99 SeitenCH 4 B P LathiHarsh LuharNoch keine Bewertungen
- Signals and SystemsDokument3 SeitenSignals and SystemsArjun Arjun100% (1)
- Chapter 3 - Analysis and Transmission of SignalsDokument53 SeitenChapter 3 - Analysis and Transmission of SignalsIBRAHIM ALFARISNoch keine Bewertungen
- DSP Lab Manual Final Presidency UniversityDokument58 SeitenDSP Lab Manual Final Presidency UniversitySUNIL KUMAR0% (1)
- Cadence Based Imlementation of SuccessiveApproximation ADC Using 45nm Cmos TechnologyDokument6 SeitenCadence Based Imlementation of SuccessiveApproximation ADC Using 45nm Cmos TechnologyUtsavNoch keine Bewertungen
- Analog To Digital ConverterDokument7 SeitenAnalog To Digital ConverterRavi Patel100% (1)
- Signals: From Analog To Digital: KL3184 - Lecture2 1Dokument27 SeitenSignals: From Analog To Digital: KL3184 - Lecture2 1Thiruselvan ManianNoch keine Bewertungen
- MIT 6.341 Lecture 20 - The Goertzel Algorithm and Chirp TransformDokument4 SeitenMIT 6.341 Lecture 20 - The Goertzel Algorithm and Chirp Transformc_mc2Noch keine Bewertungen
- DSP Matlab ProgramsDokument50 SeitenDSP Matlab ProgramsDhiraj Thakur67% (3)
- Chapter 1Dokument49 SeitenChapter 1api-3733590Noch keine Bewertungen
- ROC Z TransformDokument15 SeitenROC Z TransformMohammad Gulam Ahamad0% (1)
- The Z-Transform: Discrete Time Counterpart of Laplace TransformDokument119 SeitenThe Z-Transform: Discrete Time Counterpart of Laplace Transformsk abdullahNoch keine Bewertungen
- 10 Metal-Semiconductor JunctionsDokument56 Seiten10 Metal-Semiconductor JunctionsKamalesh DebnathNoch keine Bewertungen
- Signals and Systems EE-315: Muhammad Asim Butt Asim - Butt@umt - Edu.pkDokument28 SeitenSignals and Systems EE-315: Muhammad Asim Butt Asim - Butt@umt - Edu.pkFAISAL RAHIMNoch keine Bewertungen
- Signals and Systems: M. Irfan ArshadDokument40 SeitenSignals and Systems: M. Irfan ArshadArshad RasheedNoch keine Bewertungen
- Signals and Systems Lecture 1 OverviewDokument31 SeitenSignals and Systems Lecture 1 OverviewAbdullah ImranNoch keine Bewertungen
- Principle of Communication EngineeringDokument52 SeitenPrinciple of Communication Engineeringسعيد ابوسريعNoch keine Bewertungen
- Amo Plan 2014Dokument4 SeitenAmo Plan 2014kaps2385Noch keine Bewertungen
- Eating and HealingDokument19 SeitenEating and HealingMariana CoriaNoch keine Bewertungen
- Teacher Commitment and Dedication to Student LearningDokument8 SeitenTeacher Commitment and Dedication to Student LearningElma Grace Sales-DalidaNoch keine Bewertungen
- Offshore Wind Turbine 6mw Robust Simple EfficientDokument4 SeitenOffshore Wind Turbine 6mw Robust Simple EfficientCristian Jhair PerezNoch keine Bewertungen
- Activity2 Mba 302Dokument2 SeitenActivity2 Mba 302Juan PasyalanNoch keine Bewertungen
- Efficient Power Supply for Inductive LoadsDokument7 SeitenEfficient Power Supply for Inductive LoadsMary AndersonNoch keine Bewertungen
- Corporate GovernanceDokument35 SeitenCorporate GovernanceshrikirajNoch keine Bewertungen
- 3240-B0 Programmable Logic Controller (SIEMENS ET200S IM151-8)Dokument7 Seiten3240-B0 Programmable Logic Controller (SIEMENS ET200S IM151-8)alexandre jose dos santosNoch keine Bewertungen
- Lending Tree PDFDokument14 SeitenLending Tree PDFAlex OanonoNoch keine Bewertungen
- Digestive System Song by MR ParrDokument2 SeitenDigestive System Song by MR ParrRanulfo MayolNoch keine Bewertungen
- Module 3 Paired and Two Sample T TestDokument18 SeitenModule 3 Paired and Two Sample T TestLastica, Geralyn Mae F.Noch keine Bewertungen
- AWK and SED Command Examples in LinuxDokument2 SeitenAWK and SED Command Examples in Linuximranpathan22Noch keine Bewertungen
- Fi 7160Dokument2 SeitenFi 7160maxis2022Noch keine Bewertungen
- Primary Homework Help Food ChainsDokument7 SeitenPrimary Homework Help Food Chainsafnaxdxtloexll100% (1)
- Asm Master Oral Notes - As Per New SyllabusDokument262 SeitenAsm Master Oral Notes - As Per New Syllabusshanti prakhar100% (1)
- Relation of Jurisprudence With Other Social Sciences - LLB NotesDokument4 SeitenRelation of Jurisprudence With Other Social Sciences - LLB NotesPranjaliBawaneNoch keine Bewertungen
- Machine Tools Cutting FluidsDokument133 SeitenMachine Tools Cutting FluidsDamodara MadhukarNoch keine Bewertungen
- Experimental Investigation On The Properties of Compressed Earth Blocks Stabilised With A Liquid ChemicalDokument7 SeitenExperimental Investigation On The Properties of Compressed Earth Blocks Stabilised With A Liquid ChemicalDeb Dulal TripuraNoch keine Bewertungen
- Design of Steel Structures Handout 2012-2013Dokument3 SeitenDesign of Steel Structures Handout 2012-2013Tushar Gupta100% (1)
- Capex Vs RescoDokument1 SeiteCapex Vs Rescosingla.nishant1245Noch keine Bewertungen
- Module 2 What It Means To Be AI FirstDokument85 SeitenModule 2 What It Means To Be AI FirstSantiago Ariel Bustos YagueNoch keine Bewertungen
- Roll Covering Letter LathiaDokument6 SeitenRoll Covering Letter LathiaPankaj PandeyNoch keine Bewertungen
- Diferencias Gas LP y Gas Natural: Adminigas, S.A. de C.VDokument2 SeitenDiferencias Gas LP y Gas Natural: Adminigas, S.A. de C.VMarco Antonio Zelada HurtadoNoch keine Bewertungen
- Monitoring Tool in ScienceDokument10 SeitenMonitoring Tool in ScienceCatherine RenanteNoch keine Bewertungen
- Buyers FancyFoodDokument6 SeitenBuyers FancyFoodvanNoch keine Bewertungen
- Developmen of Chick EmbryoDokument20 SeitenDevelopmen of Chick Embryoabd6486733Noch keine Bewertungen
- Study Quran Online - The Online Quran Teaching Academy UK - QutorDokument9 SeitenStudy Quran Online - The Online Quran Teaching Academy UK - QutorQutor co ukNoch keine Bewertungen
- Checklist For Mold RemediationDokument2 SeitenChecklist For Mold Remediation631052Noch keine Bewertungen
- IBM Systems Journal PerspectivesDokument24 SeitenIBM Systems Journal PerspectivesSmitha MathewNoch keine Bewertungen
- 50hz Sine PWM Using Tms320f2812 DSPDokument10 Seiten50hz Sine PWM Using Tms320f2812 DSPsivananda11Noch keine Bewertungen