Das könnte Ihnen auch gefallen
- LV MaxSonar EZ DatasheetDokument12 SeitenLV MaxSonar EZ DatasheetOscar Maldonado100% (3)
- LV MaxSonar EZ0 DatasheetDokument2 SeitenLV MaxSonar EZ0 DatasheetJoo Jub100% (2)
- LV MaxSonar EZ1 DatasheetDokument2 SeitenLV MaxSonar EZ1 DatasheetSuLi Warraich100% (1)
- Edn 09 2010Dokument64 SeitenEdn 09 2010thắng100% (2)
- Schematic Esp8266Dokument1 SeiteSchematic Esp8266mihais100% (2)
- Special: Sensors & MeasurementDokument68 SeitenSpecial: Sensors & MeasurementGabriel Beguiriztain100% (1)
- LV MaxSonar EZ DatasheetDokument11 SeitenLV MaxSonar EZ Datasheetdenivaldo2009100% (2)
- Piic101 Piic101: Pic101 Pic102 Pic201 Pic202 Pic202 Pic102 Pic201 Pic101Dokument2 SeitenPiic101 Piic101: Pic101 Pic102 Pic201 Pic202 Pic202 Pic102 Pic201 Pic101BV Sai100% (1)
- ADCDokument3 SeitenADCAhsan Naeem100% (1)
- Pmode2 Pmode1 Pmode0Dokument1 SeitePmode2 Pmode1 Pmode0李明宗100% (1)
- Elektor 2006IND enDokument68 SeitenElektor 2006IND enD B100% (1)
- EC8701-Antennas and Microwave Engineering Department of ECE 2021-2022Dokument39 SeitenEC8701-Antennas and Microwave Engineering Department of ECE 2021-2022rubanraj r (RA1811201010009)Noch keine Bewertungen
- 5324 DP-4090 5090 D-S300Dokument28 Seiten5324 DP-4090 5090 D-S300roca9oNoch keine Bewertungen
- WSJ - Wall Street Journal WeekendDokument54 SeitenWSJ - Wall Street Journal WeekendNelsonynelsonNoch keine Bewertungen
- Interface VGA80x40: VHDL MacroDokument4 SeitenInterface VGA80x40: VHDL MacroSwan RavindraNoch keine Bewertungen
- Chapter 3 C++ Coding StartupsDokument46 SeitenChapter 3 C++ Coding StartupsMè Řą100% (1)
- ADC of PIC MicrocontrollerDokument4 SeitenADC of PIC Microcontrollerkillbill100% (2)
- Sound FXDokument18 SeitenSound FXOrcus Dantalian100% (1)
- MEGA2560 Arduino SCHDokument1 SeiteMEGA2560 Arduino SCHArief Nurhakiki100% (1)
- VS1003B MP3 Board SchematicDokument2 SeitenVS1003B MP3 Board Schematicisubha100% (1)
- Samsung Hlp4663wx Xaa CH l62b-n AtlantisDokument80 SeitenSamsung Hlp4663wx Xaa CH l62b-n AtlantisVinicius MarcosNoch keine Bewertungen
- Programmable Logic Devices (PLD)Dokument33 SeitenProgrammable Logic Devices (PLD)Rishikesh BhavsarNoch keine Bewertungen
- LCD KeyPad Shield - IntroductionDokument5 SeitenLCD KeyPad Shield - IntroductionKroscop San Martin de LunaNoch keine Bewertungen
- UFS Card White Paper 180612 PDFDokument16 SeitenUFS Card White Paper 180612 PDFteja C SNoch keine Bewertungen
- LCD PPTDokument41 SeitenLCD PPTSneh Srijan100% (1)
- ComparatorDokument42 SeitenComparatoramta1Noch keine Bewertungen
- Ece Good ManualDokument83 SeitenEce Good Manualmirandasuryaprakash_Noch keine Bewertungen
- STM32F3 UsartDokument67 SeitenSTM32F3 UsartZarija Aleksoski100% (1)
- Experience Education: Wunderman Thompson University of Western AustraliaDokument2 SeitenExperience Education: Wunderman Thompson University of Western AustraliaRaul LibNoch keine Bewertungen
- Unit 2 - Pointers-1Dokument11 SeitenUnit 2 - Pointers-1ChidaNoch keine Bewertungen
- Synchronous Sequential Ckts by Lakshmi NarayanaDokument30 SeitenSynchronous Sequential Ckts by Lakshmi NarayanaMurali Krishna100% (1)
- Title: PDX RX Block - Pi Pico Based DIGITAL MODES HF TransceiverDokument1 SeiteTitle: PDX RX Block - Pi Pico Based DIGITAL MODES HF TransceiverDhiru Kholia100% (2)
- Serial Port Communication LabviewDokument5 SeitenSerial Port Communication Labviewpj_bank100% (2)
- ZynqHW 2016 2 Lab 2 v09Dokument45 SeitenZynqHW 2016 2 Lab 2 v09abdelli ali100% (1)
- Calling Card BusinessDokument5 SeitenCalling Card BusinessAbraham GhNoch keine Bewertungen
- TCL TK TutorialDokument30 SeitenTCL TK TutorialRatna Raju AyalapoguNoch keine Bewertungen
- PIC18Fxxx Comprehensive Tutorial Containing 7Mb of InfoDokument278 SeitenPIC18Fxxx Comprehensive Tutorial Containing 7Mb of Infodaoquocdung07100% (4)
- Open-Source Software: Arduino Programming Workshop DAY-1Dokument14 SeitenOpen-Source Software: Arduino Programming Workshop DAY-1PREETI SAI THANDAVAN 20BCE1740Noch keine Bewertungen
- Lecture 23Dokument43 SeitenLecture 23AdribonNoch keine Bewertungen
- Simple Icom CI-V InterfaceDokument2 SeitenSimple Icom CI-V InterfaceMike100% (1)
- 16x2 LCD Module: Brief DescriptionDokument2 Seiten16x2 LCD Module: Brief Descriptionjidul16100% (1)
- ARM Processor Architecture and ProgrammingDokument35 SeitenARM Processor Architecture and ProgrammingMike MiyobaNoch keine Bewertungen
- BOSCH - D7044 Multiplex Single-Input ModuleDokument2 SeitenBOSCH - D7044 Multiplex Single-Input ModuleLenin Flores Rivera100% (1)
- Simple 2-meter receiver project guideDokument6 SeitenSimple 2-meter receiver project guidekeisinhoNoch keine Bewertungen
- RS 232Dokument1 SeiteRS 232Aneela Pathan100% (1)
- Smart Applications For Energy Harvested WSNS: Prabhakar T.V.,Shruti Devasenapathy, H.S.JamadagniDokument7 SeitenSmart Applications For Energy Harvested WSNS: Prabhakar T.V.,Shruti Devasenapathy, H.S.JamadagniVenkatesha PrasadNoch keine Bewertungen
- Power circuit with rotary encoder and MP9942GJ controllerDokument1 SeitePower circuit with rotary encoder and MP9942GJ controllerAndsys Electronic Innovation50% (2)
- PDF Edne Nov 2013Dokument48 SeitenPDF Edne Nov 2013torinomg100% (1)
- Samsung 203BDokument57 SeitenSamsung 203BCuong Nguyen100% (1)
- RT2021 Chap6Dokument63 SeitenRT2021 Chap6Nguyễn Lưu Hoàng MinhNoch keine Bewertungen
- Sel ProdDokument70 SeitenSel Prodnad2702100% (1)
- Sensors 23 06430Dokument18 SeitenSensors 23 06430r.shekara22Noch keine Bewertungen
- Dynamic Multipath Optimization White PaperDokument18 SeitenDynamic Multipath Optimization White PaperMarthin KingNoch keine Bewertungen
- Technical Note: Software Device Drivers For Micron MT29F NAND Flash MemoryDokument12 SeitenTechnical Note: Software Device Drivers For Micron MT29F NAND Flash MemorygogiNoch keine Bewertungen
- IPQ4019Dokument80 SeitenIPQ4019oncomNoch keine Bewertungen
- Systemcards and Modules Tcs990 Mep Telecom ComDokument15 SeitenSystemcards and Modules Tcs990 Mep Telecom ComsimonsoulNoch keine Bewertungen
- JSN SR04T 2.0Dokument4 SeitenJSN SR04T 2.0JederVieira100% (1)
- DsPIC Seminar Q205Dokument147 SeitenDsPIC Seminar Q205ecfdcv100% (1)
- pdc темыDokument2 Seitenpdc темыАндрей СидляровNoch keine Bewertungen
- Instrumentation and Test Gear Circuits ManualVon EverandInstrumentation and Test Gear Circuits ManualBewertung: 5 von 5 Sternen5/5 (1)
- Resume DaniellaAmatoDokument2 SeitenResume DaniellaAmatoDaniellaNoch keine Bewertungen
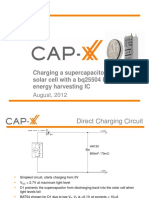
- 1208 CAP XX Charging A Supercapacitor From A Solar Cell PDFDokument12 Seiten1208 CAP XX Charging A Supercapacitor From A Solar Cell PDFmehralsmenschNoch keine Bewertungen
- Bridge Ogres Little Fishes2Dokument18 SeitenBridge Ogres Little Fishes2api-246705433Noch keine Bewertungen
- MCQ 14 Communication SystemsDokument21 SeitenMCQ 14 Communication SystemsXeverus RhodesNoch keine Bewertungen
- Depreciation Methods ExplainedDokument2 SeitenDepreciation Methods ExplainedAnsha Twilight14Noch keine Bewertungen
- Seaflo Outdoor - New Pedal Kayak Recommendation July 2022Dokument8 SeitenSeaflo Outdoor - New Pedal Kayak Recommendation July 2022wgcvNoch keine Bewertungen
- Everything You Need to Know About Distribution TransformersDokument2 SeitenEverything You Need to Know About Distribution TransformersDONNYMUCKTEENoch keine Bewertungen
- COA Full Syllabus-CSEDokument3 SeitenCOA Full Syllabus-CSEAMARTYA KUMARNoch keine Bewertungen
- Objective Type Questions SAPMDokument15 SeitenObjective Type Questions SAPMSaravananSrvn77% (31)
- Motorola l6Dokument54 SeitenMotorola l6Marcelo AriasNoch keine Bewertungen
- Tdi Hazid TemplateDokument11 SeitenTdi Hazid TemplateAnonymous rwojPlYNoch keine Bewertungen
- Rhetorical Moves in The Literature Review Section of A Sample Research ArticleDokument1 SeiteRhetorical Moves in The Literature Review Section of A Sample Research ArticleKim Sydow Campbell100% (1)
- Banking Finance Agile TestingDokument4 SeitenBanking Finance Agile Testinganil1karnatiNoch keine Bewertungen
- bq76pl455 RegistersDokument132 Seitenbq76pl455 RegistersAhmet KARANoch keine Bewertungen
- MU0017 Talent ManagementDokument12 SeitenMU0017 Talent ManagementDr. Smita ChoudharyNoch keine Bewertungen
- How To Use Oracle Account Generator For Project Related TransactionsDokument40 SeitenHow To Use Oracle Account Generator For Project Related Transactionsapnambiar88Noch keine Bewertungen
- 19286711Dokument8 Seiten19286711suruth242100% (1)
- Research On Ignorance of The Law Excuses No One From ComplianceDokument12 SeitenResearch On Ignorance of The Law Excuses No One From ComplianceAnonymous iOYkz0wNoch keine Bewertungen
- DLL Tle 6 Ict Entrepreneurship 6Dokument32 SeitenDLL Tle 6 Ict Entrepreneurship 6Jewels Garcia100% (1)
- ROUTERDokument26 SeitenROUTERIsraelNoch keine Bewertungen
- Plastic Waste Powerpoint TemplateDokument39 SeitenPlastic Waste Powerpoint TemplateVinh Lê KhảiNoch keine Bewertungen
- Ed TechDokument19 SeitenEd TechAlexie AlmohallasNoch keine Bewertungen
- CJCuny Talmor PE TurnaroundsDokument18 SeitenCJCuny Talmor PE TurnaroundsMayank Shankar SinghNoch keine Bewertungen
- HTTP://WWW - Authorstream.com/presentation/kunalcmehta 1123128 Exim PolicyDokument2 SeitenHTTP://WWW - Authorstream.com/presentation/kunalcmehta 1123128 Exim PolicyPranesh KumarNoch keine Bewertungen
- Education, A Vital Principle For Digital Library Development in IranDokument23 SeitenEducation, A Vital Principle For Digital Library Development in Iranrasuli9Noch keine Bewertungen
- Introduction Electrical MotorDokument36 SeitenIntroduction Electrical MotorYajidNoch keine Bewertungen
- 05 Executive SummaryDokument2 Seiten05 Executive SummaryHanumanth T Raj YashuNoch keine Bewertungen
- GE's Two-Decade Transformation: Jack Welch's Leadership: Amanda Rodriguez Patricia Robledo Brittany Culberson Yue JiangDokument34 SeitenGE's Two-Decade Transformation: Jack Welch's Leadership: Amanda Rodriguez Patricia Robledo Brittany Culberson Yue JiangRishendra Singh RathourNoch keine Bewertungen
- Shrey's PHP - PracticalDokument46 SeitenShrey's PHP - PracticalNahi PataNoch keine Bewertungen
- Portfolio Management Banking SectorDokument133 SeitenPortfolio Management Banking SectorNitinAgnihotri100% (1)