Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Understanding Random ForestDokument12 SeitenUnderstanding Random ForestBS GNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Digital Signal ProcessingDokument271 SeitenDigital Signal ProcessingPECMURUGAN100% (3)
- Solution Manual - Control Systems by GopalDokument0 SeitenSolution Manual - Control Systems by Gopalsaggu199185% (27)
- Symbolic Methods in Control System Analysis and Design (IET Control Engineering Series Vol. 56)Dokument414 SeitenSymbolic Methods in Control System Analysis and Design (IET Control Engineering Series Vol. 56)gbollyp100% (1)
- Code ExplainDokument4 SeitenCode ExplainThinh HoangNoch keine Bewertungen
- Last GpsDokument9 SeitenLast GpsThinh HoangNoch keine Bewertungen
- LastDokument5 SeitenLastThinh HoangNoch keine Bewertungen
- Last GpsDokument9 SeitenLast GpsThinh HoangNoch keine Bewertungen
- Code ExplainDokument4 SeitenCode ExplainThinh HoangNoch keine Bewertungen
- LastDokument5 SeitenLastThinh HoangNoch keine Bewertungen
- Test RampDokument7 SeitenTest RampThinh HoangNoch keine Bewertungen
- Ramping Move Same TimeDokument6 SeitenRamping Move Same TimeThinh HoangNoch keine Bewertungen
- Web Last v4Dokument13 SeitenWeb Last v4Thinh HoangNoch keine Bewertungen
- Ramp TestDokument4 SeitenRamp TestThinh HoangNoch keine Bewertungen
- WebDokument4 SeitenWebThinh HoangNoch keine Bewertungen
- Giao Trinh RoboconDokument1 SeiteGiao Trinh RoboconThinh HoangNoch keine Bewertungen
- Electronics 09 01277 v2Dokument19 SeitenElectronics 09 01277 v2Thinh HoangNoch keine Bewertungen
- Pca 9685Dokument2 SeitenPca 9685Thinh HoangNoch keine Bewertungen
- Floor Cleaning FixedDokument3 SeitenFloor Cleaning FixedThinh HoangNoch keine Bewertungen
- Code OkDokument3 SeitenCode OkThinh HoangNoch keine Bewertungen
- 2013 RoboCup Kohlbrecher Open Source Tools PDFDokument9 Seiten2013 RoboCup Kohlbrecher Open Source Tools PDFguterresNoch keine Bewertungen
- Pen Chie-Tech Report - 8888Dokument6 SeitenPen Chie-Tech Report - 8888Thinh HoangNoch keine Bewertungen
- 6 3 (Published) (ASAC2011) (Controllers For ROBOT) NGMThaoDokument7 Seiten6 3 (Published) (ASAC2011) (Controllers For ROBOT) NGMThaoThinh HoangNoch keine Bewertungen
- CDMCDokument12 SeitenCDMCchoonhooiNoch keine Bewertungen
- BluetoothDokument5 SeitenBluetoothThinh HoangNoch keine Bewertungen
- MC81F4x15: User's ManualDokument193 SeitenMC81F4x15: User's ManualThinh HoangNoch keine Bewertungen
- Auto Tune PidDokument1 SeiteAuto Tune PidThinh HoangNoch keine Bewertungen
- 2.1 Ponder Over Questions: QuoraDokument27 Seiten2.1 Ponder Over Questions: QuoraAtif KureshiNoch keine Bewertungen
- Csi 5155 ML Project ReportDokument24 SeitenCsi 5155 ML Project Report77Gorde Priyanka100% (1)
- Introduction To Optimization: Linear ProgrammingDokument10 SeitenIntroduction To Optimization: Linear ProgrammingSahil GargNoch keine Bewertungen
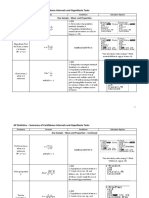
- AP Statistics - Summary of Confidence Intervals and Hypothesis TestsDokument5 SeitenAP Statistics - Summary of Confidence Intervals and Hypothesis TestsThảo VânNoch keine Bewertungen
- Lagrange Multipliers and Optimization ProblemsDokument3 SeitenLagrange Multipliers and Optimization Problemsjuanagallardo01Noch keine Bewertungen
- PSO Optimization 8 Bus SystemDokument11 SeitenPSO Optimization 8 Bus SystemTulio Ernesto HernándezNoch keine Bewertungen
- Diagrama de Flujo - GA6-240202501 - AA1-EV02Dokument6 SeitenDiagrama de Flujo - GA6-240202501 - AA1-EV02Vanessa SanchezNoch keine Bewertungen
- 7.3 PcaDokument17 Seiten7.3 PcaMatrix BotNoch keine Bewertungen
- M02 Helb5053 01 Se C02Dokument30 SeitenM02 Helb5053 01 Se C02Abid Siddiq MurtazaiNoch keine Bewertungen
- IE 312-5.1-Location Problem Basic Models-Continuous IIDokument32 SeitenIE 312-5.1-Location Problem Basic Models-Continuous IISalim GündüzNoch keine Bewertungen
- Steel Opensees Other Opensees OtherDokument12 SeitenSteel Opensees Other Opensees Otherdino chenNoch keine Bewertungen
- Endterm IIP SolutionDokument4 SeitenEndterm IIP SolutionSunidhi SharmaNoch keine Bewertungen
- SMOTE Using Python1Dokument9 SeitenSMOTE Using Python1Ioanna DiamNoch keine Bewertungen
- Problem Solving Strategies by Arthur AngelDokument128 SeitenProblem Solving Strategies by Arthur AngelHexagon VapesNoch keine Bewertungen
- S S S 3 Fur Maths 2ND Term E-Note 2017Dokument31 SeitenS S S 3 Fur Maths 2ND Term E-Note 2017Gabriel OnalekeNoch keine Bewertungen
- Cory Rieth Lecture MVPADokument23 SeitenCory Rieth Lecture MVPARasheed KibriaNoch keine Bewertungen
- Comparing Clustering Algorithms Using Financial Time-Series DataDokument21 SeitenComparing Clustering Algorithms Using Financial Time-Series Dataijsab.comNoch keine Bewertungen
- Some Simple Chaotic Jerk Functions PDFDokument7 SeitenSome Simple Chaotic Jerk Functions PDFva3ttnNoch keine Bewertungen
- ML Unit-4Dokument40 SeitenML Unit-4Rajat MalikNoch keine Bewertungen
- Eigenvalue Problem PDFDokument35 SeitenEigenvalue Problem PDFMikhail TabucalNoch keine Bewertungen
- Progress Report ME 527 - Garillos DichosoDokument2 SeitenProgress Report ME 527 - Garillos DichosoEmilio Joaquin FloresNoch keine Bewertungen
- Toonify: Cartoon Photo Effect ApplicationDokument3 SeitenToonify: Cartoon Photo Effect ApplicationGabriel SezefredoNoch keine Bewertungen
- Assignment 1Dokument2 SeitenAssignment 1Faisal IrfanNoch keine Bewertungen
- It6006 Data Analytics SyllabusDokument1 SeiteIt6006 Data Analytics SyllabusjothiNoch keine Bewertungen
- Numerical Linear Algebra: Course Material Networkmaths Graduate Programme Maynooth 2010Dokument66 SeitenNumerical Linear Algebra: Course Material Networkmaths Graduate Programme Maynooth 2010hoangan118Noch keine Bewertungen
- Graph Coloring - Wikipedia, The Free EncyclopediaDokument17 SeitenGraph Coloring - Wikipedia, The Free EncyclopediaVijaya Prakash RajanalaNoch keine Bewertungen