Das könnte Ihnen auch gefallen
- Model-Driven Online Capacity Management for Component-Based Software SystemsVon EverandModel-Driven Online Capacity Management for Component-Based Software SystemsNoch keine Bewertungen
- Defect Prediction in Software Development & MaintainenceVon EverandDefect Prediction in Software Development & MaintainenceNoch keine Bewertungen
- Resource Allocation and Management in Cloud Based NetworksDokument5 SeitenResource Allocation and Management in Cloud Based NetworksthesijNoch keine Bewertungen
- Survey On Job Scheduling Algorithms in Cloud ComputingDokument4 SeitenSurvey On Job Scheduling Algorithms in Cloud ComputingInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Grid Scheduling Using Various Performance Measures - A Comparative StudyDokument12 SeitenGrid Scheduling Using Various Performance Measures - A Comparative StudyUbiquitous Computing and Communication JournalNoch keine Bewertungen
- (IJETA-V3I3P6) :mandeep Kaur, Manoj AgnihotriDokument5 Seiten(IJETA-V3I3P6) :mandeep Kaur, Manoj AgnihotriIJETA - EighthSenseGroupNoch keine Bewertungen
- Scheduling Algorithms For Grid Computing: State of The Art and Open ProblemsDokument55 SeitenScheduling Algorithms For Grid Computing: State of The Art and Open ProblemsGunjan GoswamiNoch keine Bewertungen
- An Infrastructure For Dynamic Resource Scheduling and Virtual Machine Based Prediction in The CloudDokument5 SeitenAn Infrastructure For Dynamic Resource Scheduling and Virtual Machine Based Prediction in The CloudKarthikaMurugesanNoch keine Bewertungen
- Ant Colony Optimization For Effective Load Balancing in Cloud ComputingDokument6 SeitenAnt Colony Optimization For Effective Load Balancing in Cloud ComputingInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Self-Organizing Agents For Grid Load BalancingDokument8 SeitenSelf-Organizing Agents For Grid Load Balancingsanthosh_ram12Noch keine Bewertungen
- Management of Data Intensive Application Workflow in Cloud ComputingDokument4 SeitenManagement of Data Intensive Application Workflow in Cloud ComputingInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Stretching Site Resources in Cloud ComputingDokument4 SeitenStretching Site Resources in Cloud Computingsurendiran123Noch keine Bewertungen
- JHSN BliDokument33 SeitenJHSN Blisunnyb77Noch keine Bewertungen
- 53 P16mcae8 2020051902490840Dokument30 Seiten53 P16mcae8 2020051902490840Nithin SSNoch keine Bewertungen
- Paper 1Dokument6 SeitenPaper 1vivek2mbNoch keine Bewertungen
- Framework For Adaptive Grid Computing ServiceDokument11 SeitenFramework For Adaptive Grid Computing ServiceMacCauIIichNoch keine Bewertungen
- Clade04 Cca GridDokument8 SeitenClade04 Cca Gridxico107Noch keine Bewertungen
- Gossip New SourceDokument5 SeitenGossip New SourcePraveen KumarNoch keine Bewertungen
- A Taxonomy of Scientific Workflow Systems For Grid ComputingDokument6 SeitenA Taxonomy of Scientific Workflow Systems For Grid ComputingLoredana DutaNoch keine Bewertungen
- Programming The GridDokument24 SeitenProgramming The GridMarcelo VassolerNoch keine Bewertungen
- Deepti Project ReportDokument63 SeitenDeepti Project ReportTaslim AlamNoch keine Bewertungen
- Ijcse10 02 02 03 PDFDokument5 SeitenIjcse10 02 02 03 PDFAzhar StapaNoch keine Bewertungen
- Modify Load Balancing in Cloud Database EnvironmentDokument6 SeitenModify Load Balancing in Cloud Database EnvironmentAaditya SijariyaNoch keine Bewertungen
- Cloud ComputingDokument6 SeitenCloud ComputingmsisipuNoch keine Bewertungen
- Sieve: Actionable Insights From Monitored Metrics in MicroservicesDokument17 SeitenSieve: Actionable Insights From Monitored Metrics in MicroservicesyNoch keine Bewertungen
- An Approach To Grid Scheduling by Using Condor-G Matchmaking MechanismDokument8 SeitenAn Approach To Grid Scheduling by Using Condor-G Matchmaking Mechanismvaly910Noch keine Bewertungen
- P&P: A Combined Push-Pull Model For Resource Monitoring in Cloud Computing EnvironmentDokument8 SeitenP&P: A Combined Push-Pull Model For Resource Monitoring in Cloud Computing Environmentडॉ. अपर्णा त्रिपाठीNoch keine Bewertungen
- Grid Computing: Techniques and Applications Barry WilkinsonDokument34 SeitenGrid Computing: Techniques and Applications Barry WilkinsonKali DasNoch keine Bewertungen
- Cloud Scalability ConsiderationsDokument11 SeitenCloud Scalability ConsiderationsijcsesNoch keine Bewertungen
- Pxc3876861jobsched in GreidDokument7 SeitenPxc3876861jobsched in GreidnikhilgrNoch keine Bewertungen
- Grid ApplicationsDokument3 SeitenGrid Applications11kalpana11Noch keine Bewertungen
- Sathyamangalam: (Repeat The Three Steps For 8 Times)Dokument6 SeitenSathyamangalam: (Repeat The Three Steps For 8 Times)palanisamyam123Noch keine Bewertungen
- A Hybrid Algorithm For Scheduling ScientificDokument44 SeitenA Hybrid Algorithm For Scheduling Scientificmohamed fathimaNoch keine Bewertungen
- A Model For Component Based E-Governance Software SystemsDokument5 SeitenA Model For Component Based E-Governance Software SystemsInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- The Effect of The Resource Consumption Characteristics of Cloud Applications On The Efficiency of Low-Metric Auto Scaling SolutionsDokument9 SeitenThe Effect of The Resource Consumption Characteristics of Cloud Applications On The Efficiency of Low-Metric Auto Scaling SolutionsAnonymous roqsSNZNoch keine Bewertungen
- Automated Virtual Cloud Management: The Need of Future: Volume 2, Issue 3, May - June 2013Dokument5 SeitenAutomated Virtual Cloud Management: The Need of Future: Volume 2, Issue 3, May - June 2013International Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Tech Rep 0316Dokument11 SeitenTech Rep 0316Alyssa BuenaventuraNoch keine Bewertungen
- Cache Performance Based On Response Time and Cost Effectivein Cloud ComputingDokument10 SeitenCache Performance Based On Response Time and Cost Effectivein Cloud ComputingInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- 1 s2.0 S1084804515001320 MainDokument27 Seiten1 s2.0 S1084804515001320 MainMikassa AckrNoch keine Bewertungen
- 2019 EST Paper SOLDokument7 Seiten2019 EST Paper SOLMAxyerNoch keine Bewertungen
- Efficient Scheduling Strategy Using Communication Aware Scheduling For Parallel Jobs in ClustersDokument14 SeitenEfficient Scheduling Strategy Using Communication Aware Scheduling For Parallel Jobs in ClustersNgô Thành LongNoch keine Bewertungen
- NotesDokument5 SeitenNotesMUNEEBA GULNoch keine Bewertungen
- App FactoryDokument14 SeitenApp Factoryxico107Noch keine Bewertungen
- CSE3035 Principles of Cloud Computing: General Instructions (If Any) :1. OPEN BOOK Examinations, 2.Dokument5 SeitenCSE3035 Principles of Cloud Computing: General Instructions (If Any) :1. OPEN BOOK Examinations, 2.Shivam ChaharNoch keine Bewertungen
- Semi-Formal Models To Support Program Development: Autonomic Management Within Component Based Parallel and Distributed ProgrammingDokument22 SeitenSemi-Formal Models To Support Program Development: Autonomic Management Within Component Based Parallel and Distributed ProgrammingSimar RandhavaNoch keine Bewertungen
- Optimizing Cloud Data Centers Through Machine LearningDokument3 SeitenOptimizing Cloud Data Centers Through Machine LearningRatnadeep BhattacharyaNoch keine Bewertungen
- Processor Evaluation in An Embedded Systems Design EnvironmentDokument6 SeitenProcessor Evaluation in An Embedded Systems Design EnvironmentAshraf KPNoch keine Bewertungen
- Load Balancing Optimization Based On Enhanced Genetic Algorithm in Cloud ComputingDokument7 SeitenLoad Balancing Optimization Based On Enhanced Genetic Algorithm in Cloud ComputingIJRASETPublicationsNoch keine Bewertungen
- Cloud Computing Profit MaximizationDokument76 SeitenCloud Computing Profit MaximizationShashi Kumar83% (6)
- Ijgca 030404Dokument11 SeitenIjgca 030404ijgcaNoch keine Bewertungen
- Paper 1Dokument9 SeitenPaper 1PROJECT POINTNoch keine Bewertungen
- Reference2 PDFDokument15 SeitenReference2 PDFRadha KrishnaNoch keine Bewertungen
- Job and Application-Level Scheduling in Distributed ComputingDokument12 SeitenJob and Application-Level Scheduling in Distributed ComputingUbiquitous Computing and Communication JournalNoch keine Bewertungen
- Key Considerations For A Resilient and Autonomous Deployment and Configuration Infrastructure For Cyber-Physical SystemsDokument8 SeitenKey Considerations For A Resilient and Autonomous Deployment and Configuration Infrastructure For Cyber-Physical SystemsmohammedzuluNoch keine Bewertungen
- Benefits of Global Grid Computing For Job Scheduling: Carsten Ernemann, Volker Hamscher, Ramin YahyapourDokument6 SeitenBenefits of Global Grid Computing For Job Scheduling: Carsten Ernemann, Volker Hamscher, Ramin YahyapourRoba AlnajjarNoch keine Bewertungen
- Designing Software Components For RtosDokument15 SeitenDesigning Software Components For RtosRomualdo Begale PrudêncioNoch keine Bewertungen
- The Role of Planning in Grid ComputingDokument10 SeitenThe Role of Planning in Grid ComputingquamrulahsanNoch keine Bewertungen
- Ejsr 65 3 15Dokument10 SeitenEjsr 65 3 15AbiJosh ZenNoch keine Bewertungen
- International Journal of Engineering Research and DevelopmentDokument4 SeitenInternational Journal of Engineering Research and DevelopmentIJERDNoch keine Bewertungen
- Enhanced Throttled Balancing Algorithm For Cloud ComputingDokument13 SeitenEnhanced Throttled Balancing Algorithm For Cloud ComputingAlmazeye MedaNoch keine Bewertungen
- Object Oriented MetricsDokument33 SeitenObject Oriented MetricsABHILASH TYAGI 21104019Noch keine Bewertungen
- C For Hackers - Overview PTDokument20 SeitenC For Hackers - Overview PTSai Aung Hein KhamNoch keine Bewertungen
- The Sssessential List of Microsoft Outlook Keyboard ShortcutsDokument3 SeitenThe Sssessential List of Microsoft Outlook Keyboard Shortcutsabidaliabid1Noch keine Bewertungen
- Change Yourself: Golang Cheat SheetDokument2 SeitenChange Yourself: Golang Cheat SheetZerihunNoch keine Bewertungen
- Software Maintenance: 2004 by SECDokument91 SeitenSoftware Maintenance: 2004 by SECAnubolu Babu100% (1)
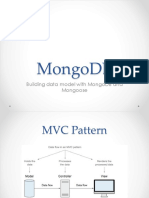
- Mon God Band MongooseDokument27 SeitenMon God Band Mongoosesunil601Noch keine Bewertungen
- D17366GC10 - SG OracleDokument284 SeitenD17366GC10 - SG OraclegcarreongNoch keine Bewertungen
- 5Dokument4 Seiten5Haru HarshuNoch keine Bewertungen
- PeopleTools853 Resolved Incidents PDFDokument15 SeitenPeopleTools853 Resolved Incidents PDFAnHuertaNoch keine Bewertungen
- DeepakpresentationDokument20 SeitenDeepakpresentationDEEPAK VERMANoch keine Bewertungen
- Cmmi 2Dokument4 SeitenCmmi 2yusaf40Noch keine Bewertungen
- Advanced Database SystemsDokument7 SeitenAdvanced Database SystemsKeng Oei QuekNoch keine Bewertungen
- Research Methodology: 5. Systematic Literature Review (SLR)Dokument55 SeitenResearch Methodology: 5. Systematic Literature Review (SLR)karimNoch keine Bewertungen
- 7 RICEFW Interview Questions2311Dokument24 Seiten7 RICEFW Interview Questions2311Mayank HajareNoch keine Bewertungen
- Expectation From QMS: by FazalwahabDokument10 SeitenExpectation From QMS: by FazalwahabHaris ZafarNoch keine Bewertungen
- Unit Test 2Dokument1 SeiteUnit Test 2Alyssa WhiteNoch keine Bewertungen
- Data Modeling: Jak Na CheatsheetDokument3 SeitenData Modeling: Jak Na CheatsheetHanane Abdelmadjid AllalNoch keine Bewertungen
- Kammavari Sangam ® K.S.Institute of Technology: Computer Communication Networks Lab 15TEL77Dokument63 SeitenKammavari Sangam ® K.S.Institute of Technology: Computer Communication Networks Lab 15TEL77badboyNoch keine Bewertungen
- Java-QUESTION BANKDokument7 SeitenJava-QUESTION BANKThuppaki ShootNoch keine Bewertungen
- Temp 2Dokument2 SeitenTemp 2surendrajain2003Noch keine Bewertungen
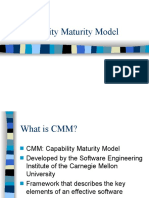
- Capability Maturity ModelDokument33 SeitenCapability Maturity ModelMuskan SoniNoch keine Bewertungen
- Smart Contract Security Audit ReportDokument27 SeitenSmart Contract Security Audit ReportTommyNoch keine Bewertungen
- HTML Part1Dokument33 SeitenHTML Part1Varsha PatilNoch keine Bewertungen
- Problem StatementDokument67 SeitenProblem StatementParth GabhaneNoch keine Bewertungen
- My SQL QuestionsDokument10 SeitenMy SQL QuestionsYashasvi BhatnagarNoch keine Bewertungen
- Software EngineeringDokument35 SeitenSoftware EngineeringPravallika ReddyNoch keine Bewertungen
- Lecture GPIO - C (Wiringpi)Dokument20 SeitenLecture GPIO - C (Wiringpi)Smart ClasseNoch keine Bewertungen
- Unix and Linux: Computer Operating SystemsDokument11 SeitenUnix and Linux: Computer Operating SystemsJorellR40Noch keine Bewertungen
- Chapter 1 School Management ProfileDokument38 SeitenChapter 1 School Management Profilejassi7nishadNoch keine Bewertungen
- Curb-Energy-0 0 2Dokument28 SeitenCurb-Energy-0 0 2JasonNoch keine Bewertungen