Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Man TGSDokument2 SeitenMan TGSPaul CiobanuNoch keine Bewertungen
- Mini Project 1 - 1Dokument9 SeitenMini Project 1 - 1Sameer BaraNoch keine Bewertungen
- ALFA 3K 5K ManualDokument46 SeitenALFA 3K 5K ManualAamir TajNoch keine Bewertungen
- SPP2 - Siemens TXP HW ManualDokument293 SeitenSPP2 - Siemens TXP HW ManualMiguel CarpioNoch keine Bewertungen
- Operation Tables: User ManualDokument19 SeitenOperation Tables: User ManualМаксим Остапенко100% (1)
- Mixed Signal Microcontroller: FeaturesDokument69 SeitenMixed Signal Microcontroller: FeaturesAlfonso CorderoNoch keine Bewertungen
- Application of DM6437Dokument7 SeitenApplication of DM6437Nethaji Anandhavalli DNoch keine Bewertungen
- 8051 With Serial EpromDokument13 Seiten8051 With Serial EpromNethaji Anandhavalli DNoch keine Bewertungen
- Emac Driver For Dm6437Dokument14 SeitenEmac Driver For Dm6437Nethaji Anandhavalli DNoch keine Bewertungen
- CT100 (1!30!2015) With New DecalsDokument53 SeitenCT100 (1!30!2015) With New DecalsGAYLE GO100% (1)
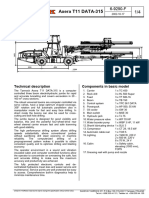
- T11 Specifications 107D11811-1Dokument4 SeitenT11 Specifications 107D11811-1Alexandra chata monsalve momsalveNoch keine Bewertungen
- Rectifier Diodes BYW29 Series Ultrafast: General Description Quick Reference DataDokument6 SeitenRectifier Diodes BYW29 Series Ultrafast: General Description Quick Reference DataEddy Santiago Neira SisaNoch keine Bewertungen
- 145 0000 R15 oDokument106 Seiten145 0000 R15 oLhidya FitriyaniNoch keine Bewertungen
- Karcher 720 - MX PDFDokument14 SeitenKarcher 720 - MX PDFIraklis100% (1)
- Ir Remote Control Fan and Light Switching ProjectDokument19 SeitenIr Remote Control Fan and Light Switching Projectramuswamy jNoch keine Bewertungen
- ChumaceraDokument42 SeitenChumaceraJoseth Revilla OchoaNoch keine Bewertungen
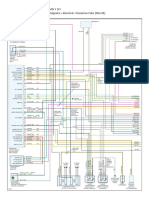
- Engine Controls (Powertrain Management) - NeonDokument3 SeitenEngine Controls (Powertrain Management) - NeonRafael MejiaNoch keine Bewertungen
- 04-68350A Manual CCN DM01-DI01 PDFDokument47 Seiten04-68350A Manual CCN DM01-DI01 PDFtaha50% (2)
- 4 Channel Relay Controller Board: User GuideDokument11 Seiten4 Channel Relay Controller Board: User GuidehansleybheenuckNoch keine Bewertungen
- Short Manual: Vision Sensor With Built-In Touch ScreenDokument65 SeitenShort Manual: Vision Sensor With Built-In Touch ScreenJavier AyzaNoch keine Bewertungen
- Virador Fub 30Dokument2 SeitenVirador Fub 30herlin.velasquezaNoch keine Bewertungen
- 652b33e4fd19962a336aa48c PamofakemagugoxavoDokument2 Seiten652b33e4fd19962a336aa48c Pamofakemagugoxavoericblackberry57Noch keine Bewertungen
- Chapter 1 - Summary of User'S Commands: No. Function ProcedureDokument34 SeitenChapter 1 - Summary of User'S Commands: No. Function ProcedurePandemonioum GrNoch keine Bewertungen
- 1 DSHK-RTDokument1 Seite1 DSHK-RTRama Aji Al HakimNoch keine Bewertungen
- A Bluetooth ModulesDokument19 SeitenA Bluetooth ModulesBruno PalašekNoch keine Bewertungen
- Brazilian Test ApparatusDokument2 SeitenBrazilian Test ApparatusfarhanHENoch keine Bewertungen
- Connecting Push Buttons To MicrocontrollerDokument1 SeiteConnecting Push Buttons To MicrocontrollerSaritechNoch keine Bewertungen
- Master Minimum Equipment List (MMEL) : U.S. Department of Transportation Federal Aviation AdministrationDokument86 SeitenMaster Minimum Equipment List (MMEL) : U.S. Department of Transportation Federal Aviation AdministrationCasey KingNoch keine Bewertungen
- 2 PDFDokument40 Seiten2 PDFCerasela GeorgescuNoch keine Bewertungen
- Water Dispenser BasicsDokument3 SeitenWater Dispenser BasicsBriely BrizNoch keine Bewertungen
- Servo Motor - RushikeshDokument17 SeitenServo Motor - RushikeshRushikesh wavare100% (2)
- BOQ - Hearts & Arrows Office 04sep2023Dokument15 SeitenBOQ - Hearts & Arrows Office 04sep2023ChristianNoch keine Bewertungen
- P 1690 TBWDokument104 SeitenP 1690 TBWShoaib JadoonNoch keine Bewertungen
- Clark Seal & BearingDokument10 SeitenClark Seal & BearingRaymond VoldinoNoch keine Bewertungen