Das könnte Ihnen auch gefallen
- Torques 3406 CaterpillarDokument3 SeitenTorques 3406 CaterpillarJuan Dolla Jjau90% (48)
- Group 7 - Mumhdsakjbai Monorail - Project Management ReportDokument21 SeitenGroup 7 - Mumhdsakjbai Monorail - Project Management ReportYogesh Parate100% (1)
- Simulation & Controlling of Brushless DC Motor Using PI/Fuzzy HybridDokument4 SeitenSimulation & Controlling of Brushless DC Motor Using PI/Fuzzy Hybridsunil kumarNoch keine Bewertungen
- Adaptive Control: Presented by Harikrishna Satish.TDokument22 SeitenAdaptive Control: Presented by Harikrishna Satish.THari ThotaNoch keine Bewertungen
- DC Motor Speed ...Dokument68 SeitenDC Motor Speed ...Yousif nasir100% (1)
- 1 Flexible Link ProjectDokument15 Seiten1 Flexible Link Projectprasaad08Noch keine Bewertungen
- Circuit Simulation of A BLDC MotorDokument4 SeitenCircuit Simulation of A BLDC MotorjpmacabascoNoch keine Bewertungen
- ME340 Lab03 Handout Simulink IntroDokument8 SeitenME340 Lab03 Handout Simulink IntroIbrahim MoamenNoch keine Bewertungen
- Colorado Brand GuidelinesDokument63 SeitenColorado Brand GuidelineszpweeksNoch keine Bewertungen
- ICEpublishing Complete 2014 Books CatalogueDokument44 SeitenICEpublishing Complete 2014 Books CatalogueLamija LamyNoch keine Bewertungen
- Generic TWS600S Service ManualDokument113 SeitenGeneric TWS600S Service ManualWise So100% (2)
- Surface Finish StandardDokument3 SeitenSurface Finish StandardvinodmysoreNoch keine Bewertungen
- Real-Time DC Motor Position Control by Fuzzy Logic and PID Controllers Using LabviewDokument6 SeitenReal-Time DC Motor Position Control by Fuzzy Logic and PID Controllers Using Labviewvikalp guptaNoch keine Bewertungen
- Lab View Based Speed Control of DC Motor Using PID Controller-1582Dokument6 SeitenLab View Based Speed Control of DC Motor Using PID Controller-1582user01254Noch keine Bewertungen
- TP Study On DC Motor by Using H InfinityDokument5 SeitenTP Study On DC Motor by Using H InfinityAhmed HummerNoch keine Bewertungen
- Study of Fuzzy Logic and Pid Controller in Buck-Boost ConverterDokument4 SeitenStudy of Fuzzy Logic and Pid Controller in Buck-Boost ConverterijsretNoch keine Bewertungen
- DC Motor LabviewDokument23 SeitenDC Motor Labviewsara_ogl7Noch keine Bewertungen
- DC Motor Speed C BcontrolDokument6 SeitenDC Motor Speed C BcontrolRoger RozarioNoch keine Bewertungen
- Closed Loop DC Motor Speed ControlDokument3 SeitenClosed Loop DC Motor Speed ControlKhayaz KunhabduNoch keine Bewertungen
- Fuzzy Logic Automatic Braking System in TrainsDokument10 SeitenFuzzy Logic Automatic Braking System in Trainsvaalgatamilram100% (1)
- DC Machine SimulationDokument12 SeitenDC Machine Simulationkiranch219Noch keine Bewertungen
- Fundamentals of Lyapunov TheoryDokument9 SeitenFundamentals of Lyapunov Theorygoitom01Noch keine Bewertungen
- Closed Loop Control of Stepper Motor Without Position SensorDokument9 SeitenClosed Loop Control of Stepper Motor Without Position SensorlamushkNoch keine Bewertungen
- Lab Pid Motor ControlDokument17 SeitenLab Pid Motor ControlacajahuaringaNoch keine Bewertungen
- 3 Inverted Pendulum ProjectDokument26 Seiten3 Inverted Pendulum ProjectJoshua D JohnNoch keine Bewertungen
- Simulation and Speed Control of Induction Motor DrivesDokument76 SeitenSimulation and Speed Control of Induction Motor DrivesNWALLL67% (3)
- Control of DC Motor in Labview by Using Ni-MyrioDokument4 SeitenControl of DC Motor in Labview by Using Ni-MyrioIJSTENoch keine Bewertungen
- Design and Implementation Speed Control System of PDFDokument8 SeitenDesign and Implementation Speed Control System of PDFvince kafuaNoch keine Bewertungen
- DC Motor Speed Control Using MatlabDokument3 SeitenDC Motor Speed Control Using MatlabijsretNoch keine Bewertungen
- Speed Control of Brushless DC Motor Using Fuzzy Logic ControllerDokument9 SeitenSpeed Control of Brushless DC Motor Using Fuzzy Logic ControllerIOSRjournalNoch keine Bewertungen
- Sensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationDokument7 SeitenSensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationPhạm Văn TưởngNoch keine Bewertungen
- DC Motor PositionDokument10 SeitenDC Motor PositionearicakNoch keine Bewertungen
- Real Time DC Motor Speed Control Using Pid in Labview With ArduinoDokument3 SeitenReal Time DC Motor Speed Control Using Pid in Labview With ArduinoabsalnabiNoch keine Bewertungen
- Final Year PPT GroupDokument12 SeitenFinal Year PPT GroupritamNoch keine Bewertungen
- Transfer Function of The DC Motor (Yaser Rahmati)Dokument4 SeitenTransfer Function of The DC Motor (Yaser Rahmati)Farag AlargtNoch keine Bewertungen
- Simulation Modeling of Inverter Controlled BLDC Drive Using Four SwitchDokument18 SeitenSimulation Modeling of Inverter Controlled BLDC Drive Using Four SwitchCHEIF EDITORNoch keine Bewertungen
- Speed Control of DC Motor Using Fuzzy Logic ControllerDokument28 SeitenSpeed Control of DC Motor Using Fuzzy Logic ControllerSiddharth Singh0% (1)
- Fuzzy Logic Controller DesignDokument46 SeitenFuzzy Logic Controller Designcleiton_ctbaNoch keine Bewertungen
- BLDCDokument4 SeitenBLDCsathishNoch keine Bewertungen
- Comparison of FOC and DTCDokument6 SeitenComparison of FOC and DTCchienbkaNoch keine Bewertungen
- Tms320f2812 Based Implementation of Sensorless Control For BLDC MotorDokument10 SeitenTms320f2812 Based Implementation of Sensorless Control For BLDC Motoranhdv1979Noch keine Bewertungen
- DC-DC Converter For EVDokument6 SeitenDC-DC Converter For EVSachin AngadiNoch keine Bewertungen
- PID Control of Water Level in A Coupled Tank SystemDokument9 SeitenPID Control of Water Level in A Coupled Tank SystemEioAsan100% (1)
- Self Balancing With Pid ControlDokument7 SeitenSelf Balancing With Pid Controlengrumar100% (1)
- Model Refrence Adaptive Control Presentation by RishiDokument63 SeitenModel Refrence Adaptive Control Presentation by RishiRishi Kant Sharma100% (5)
- PID Controller For DC MotorDokument6 SeitenPID Controller For DC MotorjayaseelanNoch keine Bewertungen
- Automatic Power Factor Controller Using MicrocontrollerDokument29 SeitenAutomatic Power Factor Controller Using Microcontrollervallery1100% (3)
- Neural Controller of DC MotorDokument81 SeitenNeural Controller of DC MotorGanesan Ganesh50% (2)
- Total NotesDokument442 SeitenTotal NotesArmando MaloneNoch keine Bewertungen
- LabVIEW Simulation Tutorial - Brushed DC MotorDokument22 SeitenLabVIEW Simulation Tutorial - Brushed DC MotorNixon CardonaNoch keine Bewertungen
- Fuzzy Gain Scheduling of PID Controllers PDFDokument7 SeitenFuzzy Gain Scheduling of PID Controllers PDFMiguel ZeaNoch keine Bewertungen
- chp7 3 Economic Dispatch PDFDokument11 Seitenchp7 3 Economic Dispatch PDFdo3llah100% (1)
- EE208 Lab ManualDokument38 SeitenEE208 Lab Manualsakib shaukatNoch keine Bewertungen
- Operation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurDokument6 SeitenOperation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurAhana MalhotraNoch keine Bewertungen
- SRM Using Arduino PDFDokument9 SeitenSRM Using Arduino PDFChristian AztecaNoch keine Bewertungen
- Chapter 10 PID ControlsDokument35 SeitenChapter 10 PID ControlsRiski SepTiadi RasyaNoch keine Bewertungen
- System Simulation Using Matlab, State Plane PlotsDokument7 SeitenSystem Simulation Using Matlab, State Plane PlotsmosictrlNoch keine Bewertungen
- Practice3 DC Motor Control PDFDokument9 SeitenPractice3 DC Motor Control PDFmechernene_aek9037Noch keine Bewertungen
- DC Motor Speed Control in LabviewDokument22 SeitenDC Motor Speed Control in LabviewMihai BogdanNoch keine Bewertungen
- Variable Speed AC Drives with Inverter Output FiltersVon EverandVariable Speed AC Drives with Inverter Output FiltersNoch keine Bewertungen
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionVon EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionNoch keine Bewertungen
- 01 06Dokument6 Seiten01 06Vikas PatelNoch keine Bewertungen
- Fuzzy Logic Microcontroller Implementation FOR Motor Speed ControlDokument6 SeitenFuzzy Logic Microcontroller Implementation FOR Motor Speed ControlMorel SangangNoch keine Bewertungen
- 5.1 High Performance Fuzzy Adaptive ControlDokument7 Seiten5.1 High Performance Fuzzy Adaptive ControlLukmanLoekmanNoch keine Bewertungen
- Design and Implementation of Fuzzy Controller On FDokument8 SeitenDesign and Implementation of Fuzzy Controller On Fziafat shehzadNoch keine Bewertungen
- Fuzzy PID Controllers Using FPGA Technique For Real Time DC Motor Speed ControlDokument8 SeitenFuzzy PID Controllers Using FPGA Technique For Real Time DC Motor Speed ControlsphinxvnnNoch keine Bewertungen
- Osnove ElektrotehnikeDokument178 SeitenOsnove Elektrotehnikevegacg100% (1)
- Basics of Electricity/Electronics: Description Get It FromDokument12 SeitenBasics of Electricity/Electronics: Description Get It FromMohammed Abu SufianNoch keine Bewertungen
- Basic Electronics - by David Williams & Michael ShilohDokument47 SeitenBasic Electronics - by David Williams & Michael ShilohNithi Segaran100% (2)
- Manual Testing SyllabusDokument1 SeiteManual Testing SyllabusRaja BabuNoch keine Bewertungen
- C Programming Language HistoryDokument5 SeitenC Programming Language HistorySyed ShaikNoch keine Bewertungen
- Who Syntax of The C Programming LanguageDokument14 SeitenWho Syntax of The C Programming LanguagebonadefkijioNoch keine Bewertungen
- C LanguageDokument91 SeitenC LanguageRan JeetNoch keine Bewertungen
- C Programming Language HistoryDokument5 SeitenC Programming Language HistorySyed ShaikNoch keine Bewertungen
- Technology and Applications - PW45Dokument8 SeitenTechnology and Applications - PW45Kosala BandaraNoch keine Bewertungen
- BLTouch Setup ManualDokument7 SeitenBLTouch Setup ManualBobbyNoch keine Bewertungen
- Municipality of AloguinsanDokument5 SeitenMunicipality of AloguinsanLady Mae BrigoliNoch keine Bewertungen
- AMAZONE ZA-F 604 Uputstvo Za Koristenje I OdrzavanjeDokument32 SeitenAMAZONE ZA-F 604 Uputstvo Za Koristenje I OdrzavanjeIvonaLepir100% (1)
- SAP Lot Sizing ParameterDokument1 SeiteSAP Lot Sizing ParameterWilliam HolidiNoch keine Bewertungen
- Optimized Design of A Bagasse Dryer System For The Sugar IndustryDokument6 SeitenOptimized Design of A Bagasse Dryer System For The Sugar IndustryTJ BolorNoch keine Bewertungen
- Cabezas de Rotulas-RotulasDokument64 SeitenCabezas de Rotulas-RotulasFRANCISCO100% (1)
- Giving Constructive Feedback Training Course OutlineDokument3 SeitenGiving Constructive Feedback Training Course OutlineJeeNoch keine Bewertungen
- Types of CCTVDokument12 SeitenTypes of CCTVpradeeplava950Noch keine Bewertungen
- Strategic Management: Internal AssessmentDokument33 SeitenStrategic Management: Internal AssessmentSAEID RAHMAN100% (1)
- TMH 2019 2020 Mail PasswordDokument7 SeitenTMH 2019 2020 Mail PasswordAni AbrahamyanNoch keine Bewertungen
- 29-Horizontal Subsea Xmas Tree enDokument2 Seiten29-Horizontal Subsea Xmas Tree encarthik_rajaNoch keine Bewertungen
- QAch 02Dokument13 SeitenQAch 02Rami Alnajjar100% (1)
- Chapter 1 AnswersDokument3 SeitenChapter 1 Answersdeerhntr22Noch keine Bewertungen
- The Mpeg Dash StandardDokument6 SeitenThe Mpeg Dash Standard9716755397Noch keine Bewertungen
- 8bit Microprocessor Using VHDLDokument16 Seiten8bit Microprocessor Using VHDLTanu Newar0% (2)
- Feedwater Heating SystemsDokument82 SeitenFeedwater Heating SystemsJitendra ChaudhariNoch keine Bewertungen
- Ultrasafe AESDokument7 SeitenUltrasafe AEShuyNoch keine Bewertungen
- BOQ Gas PipingDokument2 SeitenBOQ Gas PipingAbu ZakaNoch keine Bewertungen
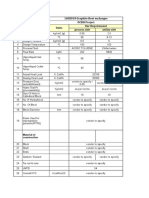
- 16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideDokument2 Seiten16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideBhaumik BhuvaNoch keine Bewertungen
- Identify Challenges in Relationship Development Final AhahhaDokument2 SeitenIdentify Challenges in Relationship Development Final AhahhaKylaNoch keine Bewertungen
- Wilmat Counterbalance Truck 11-11-2010Dokument2 SeitenWilmat Counterbalance Truck 11-11-2010alirizal0% (1)
- ASH ReportDokument3 SeitenASH ReportChandra SekharNoch keine Bewertungen
- Pressure Sensors - Nautilus: For Control Circuits, Type XML-F PresentationDokument11 SeitenPressure Sensors - Nautilus: For Control Circuits, Type XML-F PresentationxzxNoch keine Bewertungen
- Oracle Linux 6 InstallationDokument35 SeitenOracle Linux 6 InstallationendaleNoch keine Bewertungen