Das könnte Ihnen auch gefallen
- Fonction LogiqueDokument8 SeitenFonction LogiqueKamel TayahiNoch keine Bewertungen
- Crampon nlm2 PDFDokument5 SeitenCrampon nlm2 PDFAyman ElbarrakNoch keine Bewertungen
- Projet Serre JointDokument12 SeitenProjet Serre JointGOUAL SaraNoch keine Bewertungen
- CC3 2ste3 - 2018 2019Dokument6 SeitenCC3 2ste3 - 2018 2019ESSOME ESSOME OLIVIER STEPHANENoch keine Bewertungen
- Devoir de Controle N2-1as-2021-SerrageDokument3 SeitenDevoir de Controle N2-1as-2021-SerrageRasmi BaananouNoch keine Bewertungen
- Une Serrure CodeeDokument2 SeitenUne Serrure CodeeInes RebouhNoch keine Bewertungen
- Formation SolidWorks 2004Dokument36 SeitenFormation SolidWorks 2004Iadh Triaa100% (2)
- TP 1 RegistreDokument4 SeitenTP 1 Registrellahn64Noch keine Bewertungen
- Lecture D - Un Dessin D - EnsembleDokument8 SeitenLecture D - Un Dessin D - EnsemblefakherNoch keine Bewertungen
- Chap. III: Automate Programmable Industriel (API) : AutomatismeDokument27 SeitenChap. III: Automate Programmable Industriel (API) : Automatismeimane elmamoune100% (1)
- Devoir de Contrôle N°2 - Technologie - Positionneur de Parabole - 1ère AS (2015-2016) MR RAOUAFI - AbdallahDokument3 SeitenDevoir de Contrôle N°2 - Technologie - Positionneur de Parabole - 1ère AS (2015-2016) MR RAOUAFI - Abdallahsarra.benhlimaNoch keine Bewertungen
- ATC ExercicesDokument42 SeitenATC ExerciceskhamissbenzNoch keine Bewertungen
- Devoir de Contrôle N°1 (DP) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de RobotDokument4 SeitenDevoir de Contrôle N°1 (DP) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de RobotArfaoui AymenNoch keine Bewertungen
- Devoir de Synthèse N°2 - Technologie - 2ème Sciences (2009-2010) MR H.AouissaouiDokument4 SeitenDevoir de Synthèse N°2 - Technologie - 2ème Sciences (2009-2010) MR H.AouissaouiRouaissi RidhaNoch keine Bewertungen
- Chap 1 L1E Représentation FonctionnelleDokument6 SeitenChap 1 L1E Représentation FonctionnelleAbdel Moula Chouchene100% (1)
- TCP-Rep-Controle N2-2015 - 2016-Projection PDFDokument4 SeitenTCP-Rep-Controle N2-2015 - 2016-Projection PDFbrahim brahmiNoch keine Bewertungen
- Devoir de Controle N1-2as-2022Dokument4 SeitenDevoir de Controle N1-2as-2022Abdelhak GhodhbeniNoch keine Bewertungen
- Suiveur de Ligne PDFDokument20 SeitenSuiveur de Ligne PDFBilel DekhiliNoch keine Bewertungen
- 9595 E2 Bac Pro Microtechniques 2016 Partie 2 Dossier Technique Et RessourceDokument6 Seiten9595 E2 Bac Pro Microtechniques 2016 Partie 2 Dossier Technique Et RessourceHadi Ben SaïdNoch keine Bewertungen
- dcn1 2020 3t2 Pince CorrectionDokument4 Seitendcn1 2020 3t2 Pince CorrectionGuiliassNoch keine Bewertungen
- Laboratoire Mécanique de KorbaDokument15 SeitenLaboratoire Mécanique de KorbaseddikmorabetNoch keine Bewertungen
- DS3 4ScT (Système de Poinçonnage Des Pièces de Monnaies) 22-23Dokument13 SeitenDS3 4ScT (Système de Poinçonnage Des Pièces de Monnaies) 22-23Baccar RahmaNoch keine Bewertungen
- Devoir de Synthèse N°1 - Génie Électrique - 3ème Technique (2012-2013) MR KhiariDokument5 SeitenDevoir de Synthèse N°1 - Génie Électrique - 3ème Technique (2012-2013) MR KhiariAbidi NawresNoch keine Bewertungen
- Devoir Surveille de Dessin Prepa1 Epl Sem1 2022Dokument7 SeitenDevoir Surveille de Dessin Prepa1 Epl Sem1 2022Daniel Ndong OndoNoch keine Bewertungen
- 11720120710161753Dokument9 Seiten11720120710161753Youssef Ben KhemisNoch keine Bewertungen
- 6809 OfpptDokument27 Seiten6809 OfpptLAHOUSSINE ELMAHNINoch keine Bewertungen
- Graphe de Montage Et de DémontageDokument8 SeitenGraphe de Montage Et de DémontageMohsen LaabidiNoch keine Bewertungen
- DS1 - DMéc - Cellule Flexible D'usinageDokument3 SeitenDS1 - DMéc - Cellule Flexible D'usinageElafif HamdiNoch keine Bewertungen
- Travaux Pratiques de Fabrication MécaniqueDokument2 SeitenTravaux Pratiques de Fabrication MécaniqueTALLI KHADIJA100% (1)
- Lave Linge CoursDokument12 SeitenLave Linge Courspascal rabiantNoch keine Bewertungen
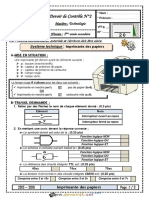
- Devoir de Contrôle N°2 - Technologie - Imprimante Des Papiers - 1ère AS (2015-2016) MR RAOUAFI - AbdallahDokument3 SeitenDevoir de Contrôle N°2 - Technologie - Imprimante Des Papiers - 1ère AS (2015-2016) MR RAOUAFI - AbdallahChihab GhlalaNoch keine Bewertungen
- Correctiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891Dokument2 SeitenCorrectiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891Bouraoui Ben AyedNoch keine Bewertungen
- 2-Devoir de Controle N1-2AS-2021.31Dokument4 Seiten2-Devoir de Controle N1-2AS-2021.31Youssef Aouadi100% (1)
- Fiche Ctn210Dokument19 SeitenFiche Ctn210Mohamed BouananiNoch keine Bewertungen
- Arduino Avec Mblock ! - HP-Formations 1Dokument7 SeitenArduino Avec Mblock ! - HP-Formations 1Adel FehriNoch keine Bewertungen
- (PDF) Maintenance Et Réparation D'un Tour Parallèle - Islam Guezaout - Academia - EduDokument114 Seiten(PDF) Maintenance Et Réparation D'un Tour Parallèle - Islam Guezaout - Academia - EduSalim DoumbiaNoch keine Bewertungen
- Aide Memoire PICDokument11 SeitenAide Memoire PICPapeCheikh SYLLANoch keine Bewertungen
- Machine de Torsion de Limes Dentaires: Département de La Formation PréparatoireDokument8 SeitenMachine de Torsion de Limes Dentaires: Département de La Formation PréparatoireTELAILIA AYA CHAIMANoch keine Bewertungen
- 3-Cotation FonctionnelleDokument4 Seiten3-Cotation FonctionnelleChaima ARIBNoch keine Bewertungen
- DC14ST2008 Enonce Corrige PDFDokument8 SeitenDC14ST2008 Enonce Corrige PDFnermin brahmiNoch keine Bewertungen
- Conditionnement Du Signal Unité ATC 1STE Bouchaib MAHBAB PDFDokument10 SeitenConditionnement Du Signal Unité ATC 1STE Bouchaib MAHBAB PDFELmokhtar HamrouniNoch keine Bewertungen
- Devoir de Synthèse N°1 - Technologie - 2ème Info (2007-2008) MR Toumi TaherDokument4 SeitenDevoir de Synthèse N°1 - Technologie - 2ème Info (2007-2008) MR Toumi TaherSakkat Oussama100% (1)
- Radar de Recul AnalyseDokument13 SeitenRadar de Recul Analysechbouki100% (3)
- Lecon A2-1 - Système CombinatoireDokument9 SeitenLecon A2-1 - Système CombinatoireElmokh LassaadNoch keine Bewertungen
- dc2 2eme 2021 2022Dokument3 Seitendc2 2eme 2021 2022Ahmed NajjarNoch keine Bewertungen
- DeoirDokument6 SeitenDeoirbasmaNoch keine Bewertungen
- 3 TP Grille Pain ElDokument4 Seiten3 TP Grille Pain ElHASSAN OUMANSOURNoch keine Bewertungen
- Devoir de Synthese N3-1°as PDFDokument6 SeitenDevoir de Synthese N3-1°as PDFWalid BhyNoch keine Bewertungen
- Contrat de Phase 20 FeuillureDokument1 SeiteContrat de Phase 20 Feuillureapi-489017636Noch keine Bewertungen
- TP Scie SauteuseDokument5 SeitenTP Scie SauteuseremivsnNoch keine Bewertungen
- Ge Esa 2018Dokument16 SeitenGe Esa 2018othmane mrichNoch keine Bewertungen
- Devoir 1 Modele 3 Si 2 Bac SM B Semestre 2Dokument6 SeitenDevoir 1 Modele 3 Si 2 Bac SM B Semestre 2lemsouguerNoch keine Bewertungen
- Sadt 2Dokument12 SeitenSadt 2Armand EssNoch keine Bewertungen
- RAPPORT DE STAGE (Réparé) - 1Dokument17 SeitenRAPPORT DE STAGE (Réparé) - 1Yannds Nkolo100% (1)
- Corrige 1Dokument2 SeitenCorrige 1hamza darrar100% (1)
- Devoir de Synthèse N°1 - Technologie - 2ème Sciences Exp (2018-2019) MR KMIMECH Adel PDFDokument7 SeitenDevoir de Synthèse N°1 - Technologie - 2ème Sciences Exp (2018-2019) MR KMIMECH Adel PDFadnenNoch keine Bewertungen
- 01 - Structure Des Systèmes MicroprogrammésDokument40 Seiten01 - Structure Des Systèmes Microprogrammésrachid BASSELAMNoch keine Bewertungen
- CNC MPDokument13 SeitenCNC MPsinior100% (1)
- Cachan1 MurphyDokument77 SeitenCachan1 MurphyAlaeddin Ben HammedNoch keine Bewertungen
- Article RobotinoDokument6 SeitenArticle RobotinoAlaeddin Ben HammedNoch keine Bewertungen
- Exam en Final Cisco Module 1Dokument24 SeitenExam en Final Cisco Module 1zennouri50% (2)
- Stage de Conception Et Développement D'une Application de Gestion Des Absences.Dokument33 SeitenStage de Conception Et Développement D'une Application de Gestion Des Absences.Wael Badri100% (1)
- Exam en Final Cisco Module 1Dokument24 SeitenExam en Final Cisco Module 1zennouri50% (2)
- Réalisation D'un Robot Mobile de Surveillance-Mémoire de Fin D'étude Avec Mention ExcellentDokument94 SeitenRéalisation D'un Robot Mobile de Surveillance-Mémoire de Fin D'étude Avec Mention ExcellentWael Badri94% (16)
- Projet-Partie 1Dokument3 SeitenProjet-Partie 1Wael BadriNoch keine Bewertungen
- Ces Gens Qui Vous Enpoisonnent L'existenceDokument6 SeitenCes Gens Qui Vous Enpoisonnent L'existencenajib mhNoch keine Bewertungen
- Interfaces Graphiques Avec MatlabDokument13 SeitenInterfaces Graphiques Avec MatlabWael BadriNoch keine Bewertungen
- Systèmes Ordinés en Temps Réel Projet de Session Robot MobileDokument13 SeitenSystèmes Ordinés en Temps Réel Projet de Session Robot MobileWael BadriNoch keine Bewertungen
- Explorons Le JaponDokument29 SeitenExplorons Le JaponWael Badri50% (2)
- Linux Embarqué Et Système EmbarquéDokument43 SeitenLinux Embarqué Et Système EmbarquéWael Badri67% (3)
- Realisation D'un Robot Mobile Commande Par PCDokument70 SeitenRealisation D'un Robot Mobile Commande Par PCWael Badri100% (6)
- Comment Vaincre Le Trac Et Parler Avec Aisance Devant Tout PublicDokument54 SeitenComment Vaincre Le Trac Et Parler Avec Aisance Devant Tout PublicSalma Hcm100% (1)
- Principe de La Détection de Mouvement.Dokument2 SeitenPrincipe de La Détection de Mouvement.Wael BadriNoch keine Bewertungen
- Cours Conduite de ProjetDokument149 SeitenCours Conduite de Projetan_w_arNoch keine Bewertungen
- Pour Avoir Du Succès: Changez Vos HabitudesDokument1 SeitePour Avoir Du Succès: Changez Vos HabitudesWael BadriNoch keine Bewertungen
- Introduction FoxDokument14 SeitenIntroduction FoxWael BadriNoch keine Bewertungen
- Le Système de Surveillance Assistée Par Ordinateur Contribute À Sauver Un Adolescent de La NoyadeDokument3 SeitenLe Système de Surveillance Assistée Par Ordinateur Contribute À Sauver Un Adolescent de La NoyadeWael BadriNoch keine Bewertungen
- Comment Dominer Le Stress Et Les SoucisDokument104 SeitenComment Dominer Le Stress Et Les SoucisWael Badri100% (1)
- Le Système de Surveillance Assistée Par Ordinateur Contribute À Sauver Un Adolescent de La NoyadeDokument3 SeitenLe Système de Surveillance Assistée Par Ordinateur Contribute À Sauver Un Adolescent de La NoyadeWael BadriNoch keine Bewertungen
- Don Miguel Ruiz Les Quatre Accords ToltequesDokument55 SeitenDon Miguel Ruiz Les Quatre Accords ToltequesThechosen WolfNoch keine Bewertungen
- Combatre Le ReportDokument32 SeitenCombatre Le ReportWael BadriNoch keine Bewertungen
- Intégration D'energie RenoublDokument21 SeitenIntégration D'energie RenoublMzg NoorNoch keine Bewertungen
- Configuration FXODokument6 SeitenConfiguration FXOCamus LanmadouceloNoch keine Bewertungen
- Ac 989 Port-BouetDokument56 SeitenAc 989 Port-BouetAIME KOULOUNoch keine Bewertungen
- Offre Technique - Travaux D'amenagement Et Remise en ConformitéDokument33 SeitenOffre Technique - Travaux D'amenagement Et Remise en ConformitéDavidNoch keine Bewertungen
- Guide Pour La Constitution Des Dossiers Pour L'émission de La Monnaie Électronique Par Les Trésors Publics NationauxDokument26 SeitenGuide Pour La Constitution Des Dossiers Pour L'émission de La Monnaie Électronique Par Les Trésors Publics NationauxChamgwei IzuzuNoch keine Bewertungen
- Expose Sur Le PontDokument42 SeitenExpose Sur Le PontPrince IrNoch keine Bewertungen
- BS PcVue-Solutions Energy-Management-System FRDokument9 SeitenBS PcVue-Solutions Energy-Management-System FRTaha Ben AmorNoch keine Bewertungen
- Exemple de CDCDokument8 SeitenExemple de CDCtahaelayaNoch keine Bewertungen
- Cours 2 Fibre OptiqueDokument6 SeitenCours 2 Fibre OptiqueFaty GueyeNoch keine Bewertungen
- Wissal RabahDokument8 SeitenWissal RabahHEDIIINoch keine Bewertungen
- Economie Numerique Partie1Dokument30 SeitenEconomie Numerique Partie1Seydou ToureNoch keine Bewertungen
- Emploi Du Temps M1 HSIDokument1 SeiteEmploi Du Temps M1 HSIYounes BlkNoch keine Bewertungen
- Présentation D'une Boutique de Quartier Au Cameroun Dans La Ville de YaoundéDokument22 SeitenPrésentation D'une Boutique de Quartier Au Cameroun Dans La Ville de YaoundéGabriel MonsieurNoch keine Bewertungen
- Devoir de Synthèse N°1 - Tableur Excel - 9ème (2009-2010) 2Dokument2 SeitenDevoir de Synthèse N°1 - Tableur Excel - 9ème (2009-2010) 2touati8100% (2)
- Cours - Technologie ÉlectriqueDokument36 SeitenCours - Technologie ÉlectriqueOuedraogo HassaneNoch keine Bewertungen
- API EleveDokument6 SeitenAPI EleveAFADNoch keine Bewertungen
- Install WDSMDTDokument38 SeitenInstall WDSMDTAlain TNoch keine Bewertungen
- Enoncé-Projet en Langage CDokument4 SeitenEnoncé-Projet en Langage CKhadija ELFRANINoch keine Bewertungen
- CindyniqueDokument3 SeitenCindyniqueSilvia JaimesNoch keine Bewertungen
- Chap 4 Gestion GroupesDokument15 SeitenChap 4 Gestion Groupessoutien russeNoch keine Bewertungen
- Technicien de Maintenance en Chauffage Ventilation Et ClimatisationDokument3 SeitenTechnicien de Maintenance en Chauffage Ventilation Et ClimatisationGastov GhassenNoch keine Bewertungen
- Pneu Premier Prix 165 70 R13 79T 150634 21002069 PDFDokument1 SeitePneu Premier Prix 165 70 R13 79T 150634 21002069 PDFJean EudesNoch keine Bewertungen
- Gestion de Droits D'accès Dans Des Réseaux Informatiques: MémoireDokument101 SeitenGestion de Droits D'accès Dans Des Réseaux Informatiques: MémoireMohamed SaadaouiNoch keine Bewertungen
- Fiche de TP PointeursDokument4 SeitenFiche de TP PointeursBERROUANENoch keine Bewertungen
- Compte RenduDokument1 SeiteCompte RendumarouenNoch keine Bewertungen
- Cours - Traitement de TexteDokument3 SeitenCours - Traitement de Texteأحمد رميدةNoch keine Bewertungen
- Document PDFDokument20 SeitenDocument PDFanass sbniNoch keine Bewertungen
- TD 5Dokument2 SeitenTD 5LGT AMINENoch keine Bewertungen
- Formation RS MINERVEDokument7 SeitenFormation RS MINERVEthieNoch keine Bewertungen
- Memoire - FinalDokument83 SeitenMemoire - FinalKhadija BelkasNoch keine Bewertungen