Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Lecture 8Dokument2 SeitenLecture 8amarggNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Lecture10 PDFDokument2 SeitenLecture10 PDFSayra Aranda AlcarazNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Gaussian MethodDokument7 SeitenGaussian MethodHapus NamaNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Bolted-Connection Design: Forest ServiceDokument25 SeitenBolted-Connection Design: Forest ServiceamarggNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Hayek - Planning, Science, and Freedom (1941)Dokument5 SeitenHayek - Planning, Science, and Freedom (1941)Robert Wenzel100% (1)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Using Impact IX49 and 61 With Nektar DAW Integration 1.1Dokument21 SeitenUsing Impact IX49 and 61 With Nektar DAW Integration 1.1Eko SeynNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Plane TrigonometryDokument545 SeitenPlane Trigonometrygnavya680Noch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- IDL6543 ModuleRubricDokument2 SeitenIDL6543 ModuleRubricSteiner MarisNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Feasibility and Optimization of Dissimilar Laser Welding ComponentsDokument366 SeitenFeasibility and Optimization of Dissimilar Laser Welding Componentskaliappan45490Noch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Cultural Practices of India Which Is Adopted by ScienceDokument2 SeitenCultural Practices of India Which Is Adopted by ScienceLevina Mary binuNoch keine Bewertungen
- 1974 - Roncaglia - The Reduction of Complex LabourDokument12 Seiten1974 - Roncaglia - The Reduction of Complex LabourRichardNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Non-Emulsifying Agent W54Dokument12 SeitenNon-Emulsifying Agent W54Pranav DubeyNoch keine Bewertungen
- History Homework Help Ks3Dokument8 SeitenHistory Homework Help Ks3afetnjvog100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Dynamic Shear Modulus SoilDokument14 SeitenDynamic Shear Modulus SoilMohamed A. El-BadawiNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- 2021 Bookmatter BasicSciencesOfNuclearMedicineDokument12 Seiten2021 Bookmatter BasicSciencesOfNuclearMedicineBeatriz MartinhoNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Role of Needs Analysis in Adult ESL Programme Design: Geoffrey BrindleyDokument16 SeitenThe Role of Needs Analysis in Adult ESL Programme Design: Geoffrey Brindleydeise krieser100% (2)
- 2014 Abidetal. TheoreticalPerspectiveofCorporateGovernance BulletinofBusinessDokument11 Seiten2014 Abidetal. TheoreticalPerspectiveofCorporateGovernance BulletinofBusinessOne PlusNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Classroom Debate Rubric Criteria 5 Points 4 Points 3 Points 2 Points 1 Point Total PointsDokument1 SeiteClassroom Debate Rubric Criteria 5 Points 4 Points 3 Points 2 Points 1 Point Total PointsKael PenalesNoch keine Bewertungen
- Analysis and Design of Well FoundationDokument40 SeitenAnalysis and Design of Well Foundationdhanabal100% (1)
- Huawei Switch - Service - ConfigDokument5 SeitenHuawei Switch - Service - ConfigTranHuuPhuocNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Gilbert Cell Design PDFDokument22 SeitenGilbert Cell Design PDFvysNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Puratattva No 41Dokument3 SeitenPuratattva No 41ultimategoonNoch keine Bewertungen
- Tools of Persuasion StudentsDokument4 SeitenTools of Persuasion StudentsBelén Revilla GonzálesNoch keine Bewertungen
- Proposed Multimodal Terminal: Architect Rosauro H. Jamandri, M. ArchDokument7 SeitenProposed Multimodal Terminal: Architect Rosauro H. Jamandri, M. Archpepito manalotoNoch keine Bewertungen
- SHAW Superdew 3 Specification SheetDokument3 SeitenSHAW Superdew 3 Specification SheetGeetha ManoharNoch keine Bewertungen
- Analysis of Green Entrepreneurship Practices in IndiaDokument5 SeitenAnalysis of Green Entrepreneurship Practices in IndiaK SrivarunNoch keine Bewertungen
- 3-Waves of RoboticsDokument2 Seiten3-Waves of RoboticsEbrahim Abd El HadyNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Handbook+for+Participants+ +GCC+TeenDokument59 SeitenHandbook+for+Participants+ +GCC+Teenchloe.2021164Noch keine Bewertungen
- Research Paper On N Queen ProblemDokument7 SeitenResearch Paper On N Queen Problemxvrdskrif100% (1)
- Apps Android StudioDokument12 SeitenApps Android StudioDaniel AlcocerNoch keine Bewertungen
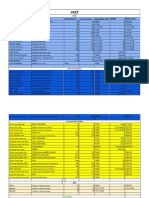
- Jazz PrepaidDokument4 SeitenJazz PrepaidHoney BunnyNoch keine Bewertungen
- Advanced Work Packaging: A Fit For Purpose ApproachDokument17 SeitenAdvanced Work Packaging: A Fit For Purpose Approachhafidz bandungNoch keine Bewertungen
- Review Rachna WasteDokument9 SeitenReview Rachna WasteSanjeet DuhanNoch keine Bewertungen
- DLL CW 7Dokument2 SeitenDLL CW 7Bea67% (3)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)