Das könnte Ihnen auch gefallen
- Robot Manipulators: Modeling, Performance Analysis and ControlVon EverandRobot Manipulators: Modeling, Performance Analysis and ControlNoch keine Bewertungen
- An Approach of Canny Edge Detection With VirtualDokument4 SeitenAn Approach of Canny Edge Detection With VirtualDan C. SâmpetreanNoch keine Bewertungen
- Piecewise Reconstruction of 3D Euler Spirals From Planar Polygonal CurvesDokument19 SeitenPiecewise Reconstruction of 3D Euler Spirals From Planar Polygonal CurvesijcseitNoch keine Bewertungen
- Solving The Pose Ambiguity Via A Simple Concentric Circle ConstraintDokument11 SeitenSolving The Pose Ambiguity Via A Simple Concentric Circle ConstraintIJEMR JournalNoch keine Bewertungen
- Nonlinear Analysis and Control of A Reaction-Wheel-Based 3-D Inverted PendulumDokument12 SeitenNonlinear Analysis and Control of A Reaction-Wheel-Based 3-D Inverted PendulumVictor PassosNoch keine Bewertungen
- Design and Simulation For Kinematic Characteristics of A Tripod Mechanism For Biped RobotsDokument9 SeitenDesign and Simulation For Kinematic Characteristics of A Tripod Mechanism For Biped Robots王根萌Noch keine Bewertungen
- Mesh - Encoding and Decoding: D. Srinivasa Reddy Dr. M. V. Subba Reddy and Dr. B. Jaya Rami ReddyDokument11 SeitenMesh - Encoding and Decoding: D. Srinivasa Reddy Dr. M. V. Subba Reddy and Dr. B. Jaya Rami ReddyRakeshconclaveNoch keine Bewertungen
- RR MainDokument9 SeitenRR MainGayathri GirishNoch keine Bewertungen
- Wccm2014 - v2 Form-Finding of Interlaced Space StructuresDokument12 SeitenWccm2014 - v2 Form-Finding of Interlaced Space StructuresHua Hidari YangNoch keine Bewertungen
- Planarmultibody A Modelica Library For Planar Multi-Body SystemsDokument8 SeitenPlanarmultibody A Modelica Library For Planar Multi-Body Systemssudhansu samalNoch keine Bewertungen
- Tracking With The Kinematics of Extremal Contours: 1 Introduction and BackgroundDokument10 SeitenTracking With The Kinematics of Extremal Contours: 1 Introduction and BackgroundCyrille LamasséNoch keine Bewertungen
- HexDokument1 SeiteHexChristian Alic KelleyNoch keine Bewertungen
- Development of Flexible Telescopic Boom Model Using Absolute Nodal Coordinate Formulation Sliding Joint Constraints With Lugre FrictionDokument6 SeitenDevelopment of Flexible Telescopic Boom Model Using Absolute Nodal Coordinate Formulation Sliding Joint Constraints With Lugre FrictionHà LầuNoch keine Bewertungen
- Non-Rigid Motion CancelingDokument10 SeitenNon-Rigid Motion Cancelingwalter huNoch keine Bewertungen
- 978-1-4577-1303-3/11/$26.00 ©2011 Ieee 2073Dokument4 Seiten978-1-4577-1303-3/11/$26.00 ©2011 Ieee 2073souaifi yosraNoch keine Bewertungen
- Paper 11-Shape Prediction Linear Algorithm Using FuzzyDokument5 SeitenPaper 11-Shape Prediction Linear Algorithm Using FuzzyEditor IJACSANoch keine Bewertungen
- Skip Strips: Maintaining Triangle Strips For View-Dependent RenderingDokument10 SeitenSkip Strips: Maintaining Triangle Strips For View-Dependent RenderingUpinder KaurNoch keine Bewertungen
- Tip 2021 3073328Dokument16 SeitenTip 2021 3073328Dr E SAKTHIVEL SNoch keine Bewertungen
- Rotation Invariance Neural NetworkDokument7 SeitenRotation Invariance Neural NetworkwebsternhidzaNoch keine Bewertungen
- Review On Performance Analysis of Square Pixel and Hexagonal Pixel Structure in Image ProcessingDokument4 SeitenReview On Performance Analysis of Square Pixel and Hexagonal Pixel Structure in Image ProcessingEditor IJRITCCNoch keine Bewertungen
- Chapter 4 ActuatorsDokument4 SeitenChapter 4 Actuatorss6404036630071Noch keine Bewertungen
- Overview of Image Matching Based On ORB Algorithm: Journal of Physics: Conference SeriesDokument7 SeitenOverview of Image Matching Based On ORB Algorithm: Journal of Physics: Conference SeriesherusyahputraNoch keine Bewertungen
- C019 ObserverControllerRobot 4thIASTED ICRM96 HonoluluDokument6 SeitenC019 ObserverControllerRobot 4thIASTED ICRM96 HonoluluCostanzo ManesNoch keine Bewertungen
- The LumigraphDokument12 SeitenThe Lumigraphdylan953989763Noch keine Bewertungen
- A Study On The Modeling of A Hexacopter: December 2015Dokument9 SeitenA Study On The Modeling of A Hexacopter: December 2015nkofodileNoch keine Bewertungen
- Vol 1 No 4 Page 390 To 394Dokument5 SeitenVol 1 No 4 Page 390 To 394Arindam das modakNoch keine Bewertungen
- HarmonicSkeleton PDFDokument10 SeitenHarmonicSkeleton PDFNicola LandroNoch keine Bewertungen
- Literature ReviewDokument15 SeitenLiterature Reviewpoluactov.serhiiNoch keine Bewertungen
- Fusing Vision Based Bearing MeasurementsDokument8 SeitenFusing Vision Based Bearing MeasurementsAlexandru MatasaruNoch keine Bewertungen
- Solution of Inverse Kinematics For SCARA Manipulator Using Adaptive Neuro-Fuzzy NetworkDokument8 SeitenSolution of Inverse Kinematics For SCARA Manipulator Using Adaptive Neuro-Fuzzy NetworkijscNoch keine Bewertungen
- Cs6504 - Computer Graphics Two Marks Question With Answers Unit-I IntroductionDokument8 SeitenCs6504 - Computer Graphics Two Marks Question With Answers Unit-I IntroductionAnonymous TvppppNoch keine Bewertungen
- Señales y SistemasDokument7 SeitenSeñales y SistemasBryan HerreraNoch keine Bewertungen
- Sarkar ACM MMSec 09 PDFDokument10 SeitenSarkar ACM MMSec 09 PDFzgxfsbjbnNoch keine Bewertungen
- Short Papers: The Tricept Robot: Dynamics and Impedance ControlDokument6 SeitenShort Papers: The Tricept Robot: Dynamics and Impedance ControlPrakashNoch keine Bewertungen
- Robust Zero-Watermarking of Images Using Neural Network: Santosh Chapaneri Radhika ChapaneriDokument6 SeitenRobust Zero-Watermarking of Images Using Neural Network: Santosh Chapaneri Radhika ChapaneriSantosh ChapaneriNoch keine Bewertungen
- TVCG 2010 02 0054.R2Dokument15 SeitenTVCG 2010 02 0054.R2Abdul WaresNoch keine Bewertungen
- LU Peng CHENG Dao-Lai SHI Gang ZHOU Zhi-Hao LI Nan-KunDokument7 SeitenLU Peng CHENG Dao-Lai SHI Gang ZHOU Zhi-Hao LI Nan-Kunmlik borhenNoch keine Bewertungen
- A Geometrical Approach To Inverse Kinematics For Continuum ManipulatorsDokument6 SeitenA Geometrical Approach To Inverse Kinematics For Continuum ManipulatorsHossein AkbariNoch keine Bewertungen
- Claus05rf ModelDokument7 SeitenClaus05rf Modelmićo_banovićNoch keine Bewertungen
- Neural Network Based Inverse Kinematics Solution F PDFDokument8 SeitenNeural Network Based Inverse Kinematics Solution F PDFBara Abu ShaqraNoch keine Bewertungen
- Vesco Vin I 2019Dokument10 SeitenVesco Vin I 2019JohnNoch keine Bewertungen
- Four Bar MechanismDokument19 SeitenFour Bar MechanismCleves AxiomaNoch keine Bewertungen
- Automatic Panoramic Image Stitching Using Invariant FeaturesDokument15 SeitenAutomatic Panoramic Image Stitching Using Invariant FeaturesAmina FENoch keine Bewertungen
- Dynamic Analysis and SimulationDokument5 SeitenDynamic Analysis and SimulationKamel FedaouiNoch keine Bewertungen
- Submitted By: Under The Guidance ofDokument43 SeitenSubmitted By: Under The Guidance ofSandeepSangwanNoch keine Bewertungen
- Trajectory Generation For High Speed Pick-and-Place Robots: Cornelius Barnard, Sébastien Briot, Stéphane CaroDokument11 SeitenTrajectory Generation For High Speed Pick-and-Place Robots: Cornelius Barnard, Sébastien Briot, Stéphane Carosifo mohNoch keine Bewertungen
- A Region-Based Model and Binary Level Set Function Applied To Weld Defects Detection in Radiographic ImagesDokument9 SeitenA Region-Based Model and Binary Level Set Function Applied To Weld Defects Detection in Radiographic ImagesInternational Journal of New Computer Architectures and their Applications (IJNCAA)Noch keine Bewertungen
- Systems & Control Letters: Peng Lin, Kaiyu Qin, Zhongkui Li, Wei RenDokument8 SeitenSystems & Control Letters: Peng Lin, Kaiyu Qin, Zhongkui Li, Wei Renlahoucine1984Noch keine Bewertungen
- Image Feature ExtractionDokument7 SeitenImage Feature ExtractionNail CadalliNoch keine Bewertungen
- Design and Development of Optical Flow Based Moving Object Detection and Tracking (OMODT) SystemDokument8 SeitenDesign and Development of Optical Flow Based Moving Object Detection and Tracking (OMODT) SystemInternational Journal of computational Engineering research (IJCER)Noch keine Bewertungen
- Kinematics of Robots: Alba Perez GraciaDokument15 SeitenKinematics of Robots: Alba Perez GraciaLin JiangNoch keine Bewertungen
- Shape From Specular Reflection and Optical FlowDokument21 SeitenShape From Specular Reflection and Optical FlowSavantNoch keine Bewertungen
- 7.3 Softcopy-Based Systems 215: 7.3.2 Stereo EnvironmentDokument6 Seiten7.3 Softcopy-Based Systems 215: 7.3.2 Stereo Environmenttirto babbaNoch keine Bewertungen
- Assignment 2 CadmDokument15 SeitenAssignment 2 CadmLowEnd GamerNoch keine Bewertungen
- 1 s2.0 S0307904X18304487 MainDokument19 Seiten1 s2.0 S0307904X18304487 MainDesign NarayanawindpowerNoch keine Bewertungen
- Tree Modeling and Dynamics SimulationDokument7 SeitenTree Modeling and Dynamics SimulationZhang XuNoch keine Bewertungen
- Planar Linkage Synthesis: A modern CAD based approachVon EverandPlanar Linkage Synthesis: A modern CAD based approachNoch keine Bewertungen
- Kinematic Analysis and Design of A New Two-Limb Parallel Schonflies-Motion Generator Considering Isotropic ConfigurationDokument9 SeitenKinematic Analysis and Design of A New Two-Limb Parallel Schonflies-Motion Generator Considering Isotropic ConfigurationIAES International Journal of Robotics and AutomationNoch keine Bewertungen
- Elliptical TrajectoryDokument3 SeitenElliptical TrajectoryMostafaKamelNoch keine Bewertungen
- AVR Assembly Tutorial CompleteDokument611 SeitenAVR Assembly Tutorial CompleteTanvir Hussain100% (27)
- Repair Instruction For Engine Repair Manual: PrecautionDokument3 SeitenRepair Instruction For Engine Repair Manual: PrecautionHenry SilvaNoch keine Bewertungen
- Cryogenic Insulation TechnologyDokument61 SeitenCryogenic Insulation Technologyeduard.turon100% (1)
- Business Model Canvas: Key Partners Key Activities Value Propositions Customer Relationships Customer SegmentsDokument1 SeiteBusiness Model Canvas: Key Partners Key Activities Value Propositions Customer Relationships Customer SegmentsRaihanAbdurrahmanNoch keine Bewertungen
- Microbial Genomes !Dokument15 SeitenMicrobial Genomes !talha153Noch keine Bewertungen
- Aria Soho Fdom Is02Dokument213 SeitenAria Soho Fdom Is02cipcigan danutNoch keine Bewertungen
- Robust Details Manual 2015Dokument463 SeitenRobust Details Manual 2015Ben Beach100% (1)
- Asm International: Fall / Winter 2019 - 2020 CATALOGDokument32 SeitenAsm International: Fall / Winter 2019 - 2020 CATALOGChoice OrganoNoch keine Bewertungen
- Datasheet For Safety Device ConveyorDokument6 SeitenDatasheet For Safety Device ConveyorJoe GrosirNoch keine Bewertungen
- The Enlightenment Legacy of Darwin, Freud and MarxDokument18 SeitenThe Enlightenment Legacy of Darwin, Freud and MarxPaula HicksNoch keine Bewertungen
- Very Good Paper On Dual Polarized AntennaDokument14 SeitenVery Good Paper On Dual Polarized AntennaHAPURNoch keine Bewertungen
- IBUKI Cost Reduction InitiavesDokument13 SeitenIBUKI Cost Reduction InitiavesAnirudh JoshiNoch keine Bewertungen
- 從"同性戀認同歷程"談女同志的現身壓力與因應策略Dokument20 Seiten從"同性戀認同歷程"談女同志的現身壓力與因應策略Meo RangNoch keine Bewertungen
- Pump Control (Main Hydraulic) - Main Pump RegulatorDokument13 SeitenPump Control (Main Hydraulic) - Main Pump RegulatorThein Htoon lwin100% (1)
- Introduction To Industry 4.0 and Industrial IoT Week 3 Quiz SolutionsDokument5 SeitenIntroduction To Industry 4.0 and Industrial IoT Week 3 Quiz SolutionssathyaNoch keine Bewertungen
- Oxford Learner's Bookshelf E-Books For Learning 3Dokument1 SeiteOxford Learner's Bookshelf E-Books For Learning 3Yesenia Mendoza HernandezNoch keine Bewertungen
- HFO HomeworkDokument2 SeitenHFO HomeworkAna May Durante BaldelomarNoch keine Bewertungen
- Group A Project.Dokument26 SeitenGroup A Project.Ujwal JaiswalNoch keine Bewertungen
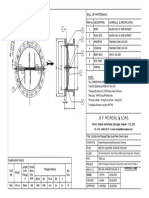
- Dual Plate 800 NB-ModelDokument1 SeiteDual Plate 800 NB-ModelTanmoy DuttaNoch keine Bewertungen
- Cantilever Lab PDFDokument6 SeitenCantilever Lab PDFDuminduJayakodyNoch keine Bewertungen
- Foundatin of Engeneering 2Dokument16 SeitenFoundatin of Engeneering 2sunshaniNoch keine Bewertungen
- Group Assignment Golden RatioDokument4 SeitenGroup Assignment Golden RatioRIFAH FIDZDIANI AIN BINTI RIFKIY FS21110415Noch keine Bewertungen
- Communication EngineeringDokument15 SeitenCommunication Engineeringhelloworld100100% (1)
- Finite Element Heat Transfer EquationsDokument8 SeitenFinite Element Heat Transfer EquationsRicox4444Noch keine Bewertungen
- Autocad CommandsDokument28 SeitenAutocad CommandsDipankar borahNoch keine Bewertungen
- Power Imbalance Issues in AdvertisingDokument22 SeitenPower Imbalance Issues in AdvertisingIonut IugaNoch keine Bewertungen
- Lyapunov Function - Dynamical SystemsDokument4 SeitenLyapunov Function - Dynamical SystemsmCmAlNoch keine Bewertungen
- Five Codes of Barthes in Shahraz's Story A Pair of Jeans: A Post-Structural AnalysisDokument14 SeitenFive Codes of Barthes in Shahraz's Story A Pair of Jeans: A Post-Structural Analysismuhammad faheemNoch keine Bewertungen
- Workbook 8 Spiritual AwakeningDokument2 SeitenWorkbook 8 Spiritual AwakeningcelcwzNoch keine Bewertungen
- Sakaka Project 405 MW: Checklist - Electrical Installation of ACCBDokument1 SeiteSakaka Project 405 MW: Checklist - Electrical Installation of ACCBVenkataramanan SNoch keine Bewertungen