Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Infopack 2016 enDokument44 SeitenInfopack 2016 enAlbertoNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Tech. Specs. For 11 KV DP StructureDokument7 SeitenTech. Specs. For 11 KV DP StructureSaraswatapalitNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Slum FinalDokument46 SeitenSlum FinalSanghita Bhowmick83% (6)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- "Part - I - General Central Services Group B'Dokument13 Seiten"Part - I - General Central Services Group B'NarayanaNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Material Handling System and ASRS PDFDokument13 SeitenMaterial Handling System and ASRS PDFHarsh PatelNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Upload Photosimages Into Custom Table & Print in Adobe FormDokument14 SeitenUpload Photosimages Into Custom Table & Print in Adobe FormEmilSNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- (Pasig) Certificate of OccupancyDokument12 Seiten(Pasig) Certificate of OccupancyAndrew MarasiganNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Welding Procedure Specification: Material / Joints QualifiedDokument2 SeitenWelding Procedure Specification: Material / Joints QualifiedFernando LlontopNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- 03 Transformers CT VTDokument10 Seiten03 Transformers CT VTEnrique G.Noch keine Bewertungen
- Lab 3 SST 4303Dokument5 SeitenLab 3 SST 4303Muazrul MangsorNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- INSPECTION-REPORT-OF-RIVER-CHANNEL-IN-BRGY Ponong in Magarao, Camarines SurDokument3 SeitenINSPECTION-REPORT-OF-RIVER-CHANNEL-IN-BRGY Ponong in Magarao, Camarines SurBerp OnrubiaNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- 507 39 Solutions-Instructor-manual Ch7 DRCSDokument13 Seiten507 39 Solutions-Instructor-manual Ch7 DRCSArun GoyalNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Final ProjectDokument4 SeitenFinal Projectsajad soleymanzadeNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
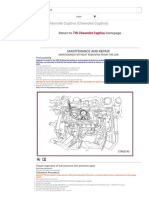
- Chevrolet Captiva Service Manual. MAINTENANCE AND REPAIR.Dokument57 SeitenChevrolet Captiva Service Manual. MAINTENANCE AND REPAIR.krisdiarto@gmail.com96% (23)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Pso MPPTDokument10 SeitenPso MPPTDileep GNoch keine Bewertungen
- Technical Information Sheet: General Information: ISO 12944 TI - G 9 / UsaDokument6 SeitenTechnical Information Sheet: General Information: ISO 12944 TI - G 9 / UsaBash MatNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- WAXESDokument2 SeitenWAXESPra YogaNoch keine Bewertungen
- Technical Brochure Metal Ceilings V100-V200-en EUDokument12 SeitenTechnical Brochure Metal Ceilings V100-V200-en EUNicu PotîngNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- BSM BWMP - D1 and D2Dokument34 SeitenBSM BWMP - D1 and D2Adnan DjamalNoch keine Bewertungen
- Types of Processors and RAM'sDokument26 SeitenTypes of Processors and RAM'sSneha NairNoch keine Bewertungen
- c02 Scrubber User ManualDokument30 Seitenc02 Scrubber User ManualJomhel CalluengNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- (INGCO) 06 November 2023 Stock ReportDokument23 Seiten(INGCO) 06 November 2023 Stock ReportMandiri JayaNoch keine Bewertungen
- Handling An Maintenance of Construction Machineries, Equipments and InstrumentsDokument13 SeitenHandling An Maintenance of Construction Machineries, Equipments and InstrumentsVelmurugan BalasubramanianNoch keine Bewertungen
- Grasses Their Use in BuildingDokument8 SeitenGrasses Their Use in BuildingpitufitoNoch keine Bewertungen
- Hydrocracking Reactor Temperature Control For Increased Safety, Reliability and PerformanceDokument8 SeitenHydrocracking Reactor Temperature Control For Increased Safety, Reliability and Performancekirandevi1981Noch keine Bewertungen
- Pedestrian Design Guidelines PDFDokument50 SeitenPedestrian Design Guidelines PDFIvan AndradeNoch keine Bewertungen
- Comparative Study of P&O and Inc MPPT AlgorithmsDokument7 SeitenComparative Study of P&O and Inc MPPT AlgorithmsVinod KohliNoch keine Bewertungen
- FM Approvals CN 1613Dokument0 SeitenFM Approvals CN 1613Marcelo PeixotoNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Architecture Concerns of TST and NATO TST ToolDokument9 SeitenArchitecture Concerns of TST and NATO TST Tooldorupara718747Noch keine Bewertungen
- Electroplating of Silver, Zinc and IronDokument13 SeitenElectroplating of Silver, Zinc and IronTahira AzamNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)