Das könnte Ihnen auch gefallen
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Von EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Noch keine Bewertungen
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesVon EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesNoch keine Bewertungen
- Désignation Des MatériauxDokument5 SeitenDésignation Des MatériauxMIMFS100% (8)
- Lecture D'un Dessin D'ensembleDokument3 SeitenLecture D'un Dessin D'ensembleMIMFS92% (13)
- Scie Sauteuse (Application)Dokument5 SeitenScie Sauteuse (Application)MIMFS100% (18)
- Transformation Des Mvts ApplicationDokument4 SeitenTransformation Des Mvts ApplicationMIMFS50% (2)
- Transformation de MVTDokument24 SeitenTransformation de MVTMIMFS91% (11)
- 04 Ajustements ProfesseurDokument10 Seiten04 Ajustements Professeursaded05Noch keine Bewertungen
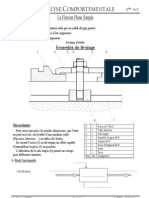
- La Flexion Plane Simple (Cours 3 SCT)Dokument4 SeitenLa Flexion Plane Simple (Cours 3 SCT)MIMFS92% (12)
- La Torsion Simple (Cours Bac)Dokument3 SeitenLa Torsion Simple (Cours Bac)MIMFS82% (11)
- Correction (Articulation en Porte À Faux) (Act 5-3)Dokument1 SeiteCorrection (Articulation en Porte À Faux) (Act 5-3)MIMFS67% (3)
- Correction (Chariot Longitudinal) (Act 2-3)Dokument1 SeiteCorrection (Chariot Longitudinal) (Act 2-3)MIMFS100% (1)
- Couples Serrage Moteur Pages 24 57Dokument208 SeitenCouples Serrage Moteur Pages 24 57pianomad00750% (4)
- F0rmes UsuellesDokument3 SeitenF0rmes UsuellesMIMFS89% (19)
- Les Embrayages Et Les FreinsDokument4 SeitenLes Embrayages Et Les FreinsMIMFS88% (17)
- COURROIESDokument6 SeitenCOURROIESJean Pierre GaudillierNoch keine Bewertungen
- Les Eléments StandardDokument6 SeitenLes Eléments StandardMIMFS100% (1)
- Chapitre 10 Les EngrenagesDokument10 SeitenChapitre 10 Les Engrenagesben salem Naofel100% (1)
- Formulaire de MécaniqueDokument11 SeitenFormulaire de MécaniqueMIMFS91% (11)
- Liaison Encastrement1Dokument14 SeitenLiaison Encastrement1MIMFS100% (1)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysVon EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNoch keine Bewertungen
- EngrenagDokument7 SeitenEngrenagAbderrazak MiassarNoch keine Bewertungen
- Cotation Tolérancée Et AjustementsDokument8 SeitenCotation Tolérancée Et AjustementsBen Aissa ChokriNoch keine Bewertungen
- Chapitre 5 Transmission Puissance EngrenagesDokument14 SeitenChapitre 5 Transmission Puissance EngrenagesDhaouadi AymenNoch keine Bewertungen
- AF SI TP Pompe Hydraulique de Xantia Serie 3Dokument10 SeitenAF SI TP Pompe Hydraulique de Xantia Serie 3Jaouad Jad0% (1)
- Cours Engrenage+Train Epicycloidal+DifférentielDokument54 SeitenCours Engrenage+Train Epicycloidal+DifférentielCrazy yt100% (1)
- Liaison PivotDokument54 SeitenLiaison PivotElgoHouda100% (1)
- Choix Module Rapport Des Vitesses Engrenage Droit PDFDokument2 SeitenChoix Module Rapport Des Vitesses Engrenage Droit PDFRayen BettaebNoch keine Bewertungen
- Guidage en Rotation Final CourDokument12 SeitenGuidage en Rotation Final CourOmar ChahirNoch keine Bewertungen
- Les Engrenages (Cours Bac)Dokument2 SeitenLes Engrenages (Cours Bac)MIMFS86% (43)
- Joint de Cardant Et AccouplementDokument4 SeitenJoint de Cardant Et AccouplementMIMFS100% (1)
- Joint de Cardant Et AccouplementDokument4 SeitenJoint de Cardant Et AccouplementMIMFS100% (1)
- 5 - Cahp 5 Transmission de Puissance Par Engrenages - EtudiantsDokument13 Seiten5 - Cahp 5 Transmission de Puissance Par Engrenages - EtudiantsSaber Hamdi0% (1)
- Cours Tolérances Et AjustementsDokument11 SeitenCours Tolérances Et Ajustementsexpert diag autoNoch keine Bewertungen
- Cotation FonctionnelleDokument3 SeitenCotation FonctionnelleMIMFS100% (3)
- Chap 1 Engrenages PDFDokument8 SeitenChap 1 Engrenages PDFousmaneNoch keine Bewertungen
- 16-Polie Courroie PDFDokument2 Seiten16-Polie Courroie PDFHanane TounsiNoch keine Bewertungen
- EngrenageDokument33 SeitenEngrenagechaouch.najehNoch keine Bewertungen
- Transformation Des Mvts 10-11Dokument4 SeitenTransformation Des Mvts 10-11MIMFS100% (2)
- Technique CCCDokument15 SeitenTechnique CCCNÖÚ HÄNoch keine Bewertungen
- 3 3 Transformation MVT v4Dokument2 Seiten3 3 Transformation MVT v4Sofiene GuedriNoch keine Bewertungen
- Myford Super7 Installation Et ReglagesDokument38 SeitenMyford Super7 Installation Et ReglagesHERMI NoureddineNoch keine Bewertungen
- Poupée Mobile (Act 1-3)Dokument1 SeitePoupée Mobile (Act 1-3)MIMFSNoch keine Bewertungen
- Complet Technique Alfa159 PDFDokument84 SeitenComplet Technique Alfa159 PDFDany toboysNoch keine Bewertungen
- Cours EngrenagesDokument12 SeitenCours EngrenageszohirNoch keine Bewertungen
- CH VII Trasmission de MVT Par Engrenage Source Httpsslideplayer - Frslide1395771Dokument13 SeitenCH VII Trasmission de MVT Par Engrenage Source Httpsslideplayer - Frslide1395771ALAMINoch keine Bewertungen
- Progression Programme 2STMDokument1 SeiteProgression Programme 2STMadil100% (1)
- Accouplements, Embrayages, FreinsDokument20 SeitenAccouplements, Embrayages, FreinsrachidaccNoch keine Bewertungen
- Cours Roues de Friction Poulies Et Courroies Roues Et ChainesDokument7 SeitenCours Roues de Friction Poulies Et Courroies Roues Et ChainesC'est YanaNoch keine Bewertungen
- Liaison PivotDokument6 SeitenLiaison Pivotsaded05Noch keine Bewertungen
- Variateurs CastellaDokument2 SeitenVariateurs CastellaaaaaNoch keine Bewertungen
- Correction de DentureDokument5 SeitenCorrection de DenturetopjobNoch keine Bewertungen
- Visserie, Boulonnerieetécrous 1681413364763Dokument21 SeitenVisserie, Boulonnerieetécrous 1681413364763Coumba DialloNoch keine Bewertungen
- Guidage en Rotation PDFDokument7 SeitenGuidage en Rotation PDFAyyoub BadreddineNoch keine Bewertungen
- Rondelles BellevilleDokument5 SeitenRondelles BellevilleMahrez ZaafouriNoch keine Bewertungen
- Train D'engrenageDokument13 SeitenTrain D'engrenageAziza KarirNoch keine Bewertungen
- G PDFDokument34 SeitenG PDFyassine22100% (1)
- Chap 2 EngrenagesDokument19 SeitenChap 2 EngrenagesMhd Koundio100% (1)
- Cours Pignons Chaine LvesDokument1 SeiteCours Pignons Chaine LvesBouthalja FaikaNoch keine Bewertungen
- 130 Engrenages PreparationDokument9 Seiten130 Engrenages PreparationIkram MisbahNoch keine Bewertungen
- Les Accouplements 2 Bac Science DingenieurDokument3 SeitenLes Accouplements 2 Bac Science DingenieurkololoNoch keine Bewertungen
- EngrenagesDokument12 SeitenEngrenagesMouwadine Moussa100% (1)
- PalanDokument7 SeitenPalanYounes Benjelloun100% (1)
- Arbres Roulements Coussinets Vol 1Dokument3 SeitenArbres Roulements Coussinets Vol 1Malik Mak100% (2)
- Rattrapage Corrigé 2012 PDFDokument7 SeitenRattrapage Corrigé 2012 PDFGuiliassNoch keine Bewertungen
- Roues de FrictionDokument8 SeitenRoues de FrictionTom JerryNoch keine Bewertungen
- M17 - Montage Et Ajustement D'arbres - de Roulements Et de Coussinets GE-ESADokument8 SeitenM17 - Montage Et Ajustement D'arbres - de Roulements Et de Coussinets GE-ESAMohammed Amine Kened50% (2)
- Transmissions de Puissance PDFDokument6 SeitenTransmissions de Puissance PDFKhaled SouaissaNoch keine Bewertungen
- 1.guidage en Rotation Par RoulementDokument15 Seiten1.guidage en Rotation Par RoulementMOUSAVOU MORVANE100% (1)
- F3 ApefDokument5 SeitenF3 ApefZouhairNoch keine Bewertungen
- Filetage - Taraudage 1Dokument5 SeitenFiletage - Taraudage 1medelaidNoch keine Bewertungen
- Ci5 TD Mecanisme CameDokument1 SeiteCi5 TD Mecanisme Cameleroy makita loubakiNoch keine Bewertungen
- TD5 Vocabulaire Dzierla CédricDokument4 SeitenTD5 Vocabulaire Dzierla CédricCédric DzieNoch keine Bewertungen
- Chapitre 5 - Guidage en RotationDokument17 SeitenChapitre 5 - Guidage en Rotationahidouri100% (1)
- Organisation Fonctionnelle D'un ProduitDokument2 SeitenOrganisation Fonctionnelle D'un ProduitMIMFSNoch keine Bewertungen
- TP de TPM FinDokument17 SeitenTP de TPM FinJuge “JMK” Mpanga kabojyaNoch keine Bewertungen
- TD 1Dokument2 SeitenTD 1hello 128Noch keine Bewertungen
- Train Epicycloidal Simple PDFDokument4 SeitenTrain Epicycloidal Simple PDFEdgar ÉtapeNoch keine Bewertungen
- 16 Engrenages PDFDokument10 Seiten16 Engrenages PDFdjalikadjouNoch keine Bewertungen
- TransmissionDokument10 SeitenTransmissionSlah TounsiNoch keine Bewertungen
- Cours Les Engr DentuDokument11 SeitenCours Les Engr DentuKader HoumitaNoch keine Bewertungen
- Cours EngrenagesDokument12 SeitenCours EngrenagesOussama BkNoch keine Bewertungen
- Cours Les Engr Dentu DroitesDokument10 SeitenCours Les Engr Dentu Droitesben 10Noch keine Bewertungen
- Articulation en Porte À Faux (Act5-5)Dokument1 SeiteArticulation en Porte À Faux (Act5-5)MIMFS100% (1)
- Chariot Longitudinal Micro-Fraiseuse (Act 2-3)Dokument1 SeiteChariot Longitudinal Micro-Fraiseuse (Act 2-3)MIMFS50% (2)
- Correction (Act1-3)Dokument1 SeiteCorrection (Act1-3)MIMFSNoch keine Bewertungen
- Correction (Chariot Tour) (Act3-3)Dokument1 SeiteCorrection (Chariot Tour) (Act3-3)MIMFSNoch keine Bewertungen
- Chariot Micro Tour (Act 3-3)Dokument1 SeiteChariot Micro Tour (Act 3-3)MIMFS100% (1)
- Guidage en Rotation Par RoulementDokument2 SeitenGuidage en Rotation Par RoulementMIMFS100% (1)
- Application+Flexions+10 11Dokument2 SeitenApplication+Flexions+10 11ntayoubNoch keine Bewertungen
- Ion Fonctionnelle D'un ProduitDokument17 SeitenIon Fonctionnelle D'un ProduitMIMFS100% (1)
- Organisation Fonctionnelle D'un ProduitDokument2 SeitenOrganisation Fonctionnelle D'un ProduitMIMFSNoch keine Bewertungen
- Fonction Guidage en Rotation Par RoulementDokument4 SeitenFonction Guidage en Rotation Par RoulementMIMFS100% (7)
- Chapitre 1Dokument1 SeiteChapitre 1MIMFS100% (1)
- TD 1Dokument4 SeitenTD 1Jeremie Ivann NGOYENoch keine Bewertungen
- Mach Pain Cor 10siosp01c PDFDokument9 SeitenMach Pain Cor 10siosp01c PDFTriki BilelNoch keine Bewertungen
- Agitateurs Horizontaux PLENTYDokument4 SeitenAgitateurs Horizontaux PLENTYMba Nang Ndong MohamedNoch keine Bewertungen
- Manuel Utilisation Et Entretien (FR)Dokument16 SeitenManuel Utilisation Et Entretien (FR)Romain SCHWALLERNoch keine Bewertungen
- TD 03 - Schémas Blocs Fonctionnels - SujetDokument4 SeitenTD 03 - Schémas Blocs Fonctionnels - SujetkamalNoch keine Bewertungen
- Analyse Fonctionnelle Interne Exercice 02Dokument4 SeitenAnalyse Fonctionnelle Interne Exercice 02Oussema FaidiNoch keine Bewertungen
- Les Courroies - ExercicesDokument4 SeitenLes Courroies - ExercicesDjamel DjamNoch keine Bewertungen
- DT - Dci 0605 PDFDokument22 SeitenDT - Dci 0605 PDFalejandroNoch keine Bewertungen
- Transmettre - SMBELEVEDokument53 SeitenTransmettre - SMBELEVEAbdellah AboulouafaNoch keine Bewertungen
- Courroie - Maintenance - Préventive - (WWW - Gates.com, 20087 - E1 - PREVENTIVE - MAINTENANCE - MANUAL)Dokument68 SeitenCourroie - Maintenance - Préventive - (WWW - Gates.com, 20087 - E1 - PREVENTIVE - MAINTENANCE - MANUAL)jfejfeNoch keine Bewertungen
- BAC Etude-des-Constructions 2008 STIELECTECH PDFDokument29 SeitenBAC Etude-des-Constructions 2008 STIELECTECH PDFJawher SalemNoch keine Bewertungen
- Devoir de Controle N3-Transmission de mvt-2011Dokument3 SeitenDevoir de Controle N3-Transmission de mvt-2011GR GARMANI100% (2)
- Exercice 1: Calcul Dans Les Situations Les Plus Courantes IiiDokument3 SeitenExercice 1: Calcul Dans Les Situations Les Plus Courantes IiiAbdelhadi AZNoch keine Bewertungen
- Abou DrogbaDokument2 SeitenAbou DrogbaAbou DrogbaNoch keine Bewertungen
- T.D. Statique. Ergrrxercice N 1 - Barrage. Exercice N 2 - Champ de Pression Dans Une Liaison Pivot Glissant. Exercice N 3 - Arbre de RenvoiDokument10 SeitenT.D. Statique. Ergrrxercice N 1 - Barrage. Exercice N 2 - Champ de Pression Dans Une Liaison Pivot Glissant. Exercice N 3 - Arbre de RenvoiNada GhammemNoch keine Bewertungen
- CSMT-Chapitre 4Dokument21 SeitenCSMT-Chapitre 4soumaraNoch keine Bewertungen
- N.T. 3681A Cb1U: Particularité Des CLIO V6 Phase 2 Équipées Du Moteur L7X 762Dokument217 SeitenN.T. 3681A Cb1U: Particularité Des CLIO V6 Phase 2 Équipées Du Moteur L7X 762Florin f.Noch keine Bewertungen
- Machine À Coudre Singer No 15 - InstructionsDokument34 SeitenMachine À Coudre Singer No 15 - InstructionstraceNoch keine Bewertungen
- Ci Bac Pro Mei v2Dokument6 SeitenCi Bac Pro Mei v2fatihamNoch keine Bewertungen
- AnetDokument25 SeitenAnetGerard DupondNoch keine Bewertungen
- Check-Liste D'intervention Préventive 8Dokument26 SeitenCheck-Liste D'intervention Préventive 8Razak DossoNoch keine Bewertungen
- CourroiesDokument109 SeitenCourroiesfernandt100% (4)
- Notice D'Instructions: Réception Description Générale Installation Utilisation MaintenanceDokument36 SeitenNotice D'Instructions: Réception Description Générale Installation Utilisation MaintenanceAbou TarekNoch keine Bewertungen