Das könnte Ihnen auch gefallen
- Aprendendo A Usar o Matlab - V3Dokument23 SeitenAprendendo A Usar o Matlab - V3Daniela Alexandrino0% (1)
- Apostila de Matlab - Básico - RafaelDokument26 SeitenApostila de Matlab - Básico - RafaelJoyce PassosNoch keine Bewertungen
- Trabalho MATLABDokument27 SeitenTrabalho MATLABjohntrumundoNoch keine Bewertungen
- Tutorial MatlabDokument6 SeitenTutorial MatlabJoão Smith VieiraNoch keine Bewertungen
- Aula 1 ScilabDokument6 SeitenAula 1 ScilabHenry FerreiraNoch keine Bewertungen
- Dicas Matlab 2Dokument10 SeitenDicas Matlab 2Rodrigo MesquitaNoch keine Bewertungen
- Apnt 169 2Dokument44 SeitenApnt 169 2Fernando MonteiroNoch keine Bewertungen
- Resumo de OctaveDokument14 SeitenResumo de OctaveChristopher Rodrigues VieiraNoch keine Bewertungen
- Polígrafo Calc NumDokument68 SeitenPolígrafo Calc NumAstell EngenhariaNoch keine Bewertungen
- 2â Aula Matlab 2018.2Dokument35 Seiten2â Aula Matlab 2018.2alex.bezerraNoch keine Bewertungen
- Cur So Matlab by Carlos TeixeiraDokument30 SeitenCur So Matlab by Carlos TeixeiraGabriel LimaNoch keine Bewertungen
- Aula 01 - Matrizes - MatlabDokument23 SeitenAula 01 - Matrizes - MatlabAlisson DiegoNoch keine Bewertungen
- MNumericos Cad ExerciciosDokument28 SeitenMNumericos Cad ExerciciosAnaNoch keine Bewertungen
- Mini Curso 01Dokument41 SeitenMini Curso 01salomaosantanaNoch keine Bewertungen
- Lab Aula 01Dokument7 SeitenLab Aula 01Gabriel BrasilNoch keine Bewertungen
- Resumo de OctaveDokument13 SeitenResumo de OctavebiopoweredNoch keine Bewertungen
- Matlab Lista1Dokument11 SeitenMatlab Lista1Rodrigo MelvimNoch keine Bewertungen
- Mathcad - 10Dokument5 SeitenMathcad - 10Yudi NatumiNoch keine Bewertungen
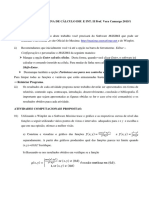
- Trabalho CDII 2015Dokument6 SeitenTrabalho CDII 2015Denise SerpaNoch keine Bewertungen
- MALTAB A A B 2020Dokument39 SeitenMALTAB A A B 2020Duarte RosaNoch keine Bewertungen
- Sinais No MatlabDokument117 SeitenSinais No MatlabFrancarll OliveiraNoch keine Bewertungen
- Laboratório 1Dokument11 SeitenLaboratório 1Igor MazzocattoNoch keine Bewertungen
- Exercicios Introducao Octave PDFDokument4 SeitenExercicios Introducao Octave PDFFlávia SantosNoch keine Bewertungen
- Computação GráficaDokument10 SeitenComputação Gráficaexamoracle3Noch keine Bewertungen
- Tutorial Octave MatlabDokument14 SeitenTutorial Octave MatlabFloriano NascimentoNoch keine Bewertungen
- Matlab - Apostila (FEI)Dokument94 SeitenMatlab - Apostila (FEI)Yuork375Noch keine Bewertungen
- Exercícios Controle e ServomecanismoDokument5 SeitenExercícios Controle e ServomecanismoVictor Hugo FerreiraNoch keine Bewertungen
- Matlab EletricaDokument63 SeitenMatlab EletricadaniloruanNoch keine Bewertungen
- Informática 1Dokument3 SeitenInformática 1Abelardo AlfredoNoch keine Bewertungen
- Exercicios Resolvidos em C - 01 - Lista E - Kevin SantiagoDokument3 SeitenExercicios Resolvidos em C - 01 - Lista E - Kevin SantiagoLeandro SchuckNoch keine Bewertungen
- Minicurso Matlab OctaveDokument33 SeitenMinicurso Matlab OctaveLopesbarbosaNoch keine Bewertungen
- Metodo de GaussDokument9 SeitenMetodo de GaussKaizenBRNoch keine Bewertungen
- Aula MatrizDokument41 SeitenAula MatrizjonathanNoch keine Bewertungen
- 01 - Introdução Ao ScilabDokument5 Seiten01 - Introdução Ao ScilabjmcarrizoNoch keine Bewertungen
- Tutorial WolframDokument21 SeitenTutorial WolframClaudia Telles BenattiNoch keine Bewertungen
- Aula 12 - MatrizesDokument11 SeitenAula 12 - MatrizesDaniel jacinto da silvaNoch keine Bewertungen
- Exercicios02 - Laços e Vetores-1Dokument4 SeitenExercicios02 - Laços e Vetores-1DIOGO ACHILES ALVES PAZNoch keine Bewertungen
- Resolvendo Integrais e Derivadas Usando o MatLABDokument10 SeitenResolvendo Integrais e Derivadas Usando o MatLABOrlindo WagnerNoch keine Bewertungen
- A2-3-Comandos MatLab IDokument18 SeitenA2-3-Comandos MatLab IalexNoch keine Bewertungen
- Lista 1Dokument9 SeitenLista 1Grazielle Tomaz NevesNoch keine Bewertungen
- Matlab - Comandos Basicos e SimulaçõesDokument16 SeitenMatlab - Comandos Basicos e SimulaçõesDavid de Almeida FiorilloNoch keine Bewertungen
- Guia Do Matlab - ITADokument99 SeitenGuia Do Matlab - ITAEduar AndrighettiNoch keine Bewertungen
- AL2-SC-I-Comandos Básicos, Geração de Sinais e M-Files ScriptsDokument7 SeitenAL2-SC-I-Comandos Básicos, Geração de Sinais e M-Files ScriptsVagner FafetineNoch keine Bewertungen
- Matlab ExerciciosDokument5 SeitenMatlab ExerciciosJhonatan GonçalvesNoch keine Bewertungen
- Introducao SILABDokument85 SeitenIntroducao SILABborges.jrNoch keine Bewertungen
- Exercicios Introducao OctaveDokument3 SeitenExercicios Introducao OctaveFabio UzedaNoch keine Bewertungen
- Programacao em MatLabDokument52 SeitenProgramacao em MatLabdaniNoch keine Bewertungen
- Lista Uninter Programação 02Dokument6 SeitenLista Uninter Programação 02NATHAN MATOS SOARESNoch keine Bewertungen
- Trabalho 1Dokument14 SeitenTrabalho 1Luis Gustavo L. VolpeNoch keine Bewertungen
- Curso MatlabDokument103 SeitenCurso MatlabJoao PrimoNoch keine Bewertungen
- Ses 3Dokument18 SeitenSes 3Humberto MachadoNoch keine Bewertungen
- Apostila Matlab OctaveDokument51 SeitenApostila Matlab OctaveEduardo Ataide de OliveiraNoch keine Bewertungen
- Lista Exercícios - MatrizesDokument4 SeitenLista Exercícios - MatrizesThierry RodriguesNoch keine Bewertungen
- Engenharia IIIDokument23 SeitenEngenharia IIIMario100% (1)
- Aula Confiabilidade PDFDokument64 SeitenAula Confiabilidade PDFneombaNoch keine Bewertungen
- 1495549232ebook - O Guia Definitivo Sobre o Black BeltDokument24 Seiten1495549232ebook - O Guia Definitivo Sobre o Black BeltneombaNoch keine Bewertungen
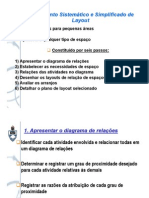
- 103 Layout Parte 1Dokument62 Seiten103 Layout Parte 1Pedro Léo Ló SoaresNoch keine Bewertungen
- Lingotamento ContínuoDokument25 SeitenLingotamento ContínuoneombaNoch keine Bewertungen
- 1a Lista Exercicio PDFDokument11 Seiten1a Lista Exercicio PDFneombaNoch keine Bewertungen
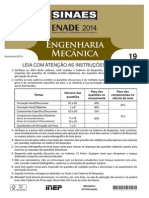
- Enade 2014 - Engenharia - MecanicaDokument32 SeitenEnade 2014 - Engenharia - MecanicaMarcelo FreireNoch keine Bewertungen
- Estatc3adstica Cap 09 PDFDokument30 SeitenEstatc3adstica Cap 09 PDFneombaNoch keine Bewertungen
- Prova 12 - Técnico de Projetos, Construção e Montagem Júnior - MecânicaDokument13 SeitenProva 12 - Técnico de Projetos, Construção e Montagem Júnior - MecânicaAlex Dos SantosNoch keine Bewertungen
- Aula Ejercicios Comportamento Mecânico Da-dNDokument54 SeitenAula Ejercicios Comportamento Mecânico Da-dNneombaNoch keine Bewertungen
- 1a Lista Exercicio PDFDokument11 Seiten1a Lista Exercicio PDFneombaNoch keine Bewertungen
- Comportamento Mecânico Dos MateriasDokument33 SeitenComportamento Mecânico Dos MateriasneombaNoch keine Bewertungen
- Produtos SiderurgicosDokument29 SeitenProdutos SiderurgicosneombaNoch keine Bewertungen
- Estatc3adstica Cap 08Dokument32 SeitenEstatc3adstica Cap 08neombaNoch keine Bewertungen
- Estatc3adstica Cap 07Dokument30 SeitenEstatc3adstica Cap 07neombaNoch keine Bewertungen
- Epm Apostila Capc3adtulo09 Ensaios Mod PDFDokument110 SeitenEpm Apostila Capc3adtulo09 Ensaios Mod PDFneombaNoch keine Bewertungen
- Tec Metalurgia PDFDokument14 SeitenTec Metalurgia PDFneombaNoch keine Bewertungen
- C Leber Chi QuetiDokument132 SeitenC Leber Chi QuetineombaNoch keine Bewertungen
- Capitulo1rev1 PDFDokument19 SeitenCapitulo1rev1 PDFneombaNoch keine Bewertungen
- Tecnico de Laboratorio - Siderurgia PDFDokument11 SeitenTecnico de Laboratorio - Siderurgia PDFneombaNoch keine Bewertungen
- Tecnico de Laboratorio - Siderurgia PDFDokument11 SeitenTecnico de Laboratorio - Siderurgia PDFneombaNoch keine Bewertungen
- Otaviano Andre Henrique Comitre de Oliveira PDFDokument82 SeitenOtaviano Andre Henrique Comitre de Oliveira PDFneombaNoch keine Bewertungen
- WeibullDokument7 SeitenWeibullRafael JanuarioNoch keine Bewertungen
- Planejamento Experimental para MercadoDokument7 SeitenPlanejamento Experimental para MercadoneombaNoch keine Bewertungen
- Exercícios Cap6Dokument15 SeitenExercícios Cap6neombaNoch keine Bewertungen
- Siderurgia IFPA CTISM PDFDokument110 SeitenSiderurgia IFPA CTISM PDFneombaNoch keine Bewertungen
- Manual de MinitabDokument41 SeitenManual de MinitabneombaNoch keine Bewertungen
- Edital PPGEM 08 2016 Selecao DoutoradoDokument11 SeitenEdital PPGEM 08 2016 Selecao DoutoradoneombaNoch keine Bewertungen
- Mecanismos de EndurecimentoDokument17 SeitenMecanismos de EndurecimentoDaniel DagostimNoch keine Bewertungen
- ReMA InformáticaDokument195 SeitenReMA InformáticaEduardo luaxi100% (1)
- InformaticaDokument2.189 SeitenInformaticaMatheus Trindade100% (1)
- Guia de Instalacao Maquina VirtualDokument37 SeitenGuia de Instalacao Maquina VirtualWancleber Vieira100% (5)
- Catalogo Fibra ÓticaDokument33 SeitenCatalogo Fibra ÓticaJosé VeigaNoch keine Bewertungen
- Manual Galaxy Buds Live - SM-R180 - UG - BR - Rev.1.1Dokument41 SeitenManual Galaxy Buds Live - SM-R180 - UG - BR - Rev.1.1AntônioNoch keine Bewertungen
- Apostila Z80 PDFDokument156 SeitenApostila Z80 PDFNobre AfonsoNoch keine Bewertungen
- TutorialDokument17 SeitenTutorialAdemir De Carvalho MartinsNoch keine Bewertungen
- SS7 Métodos de Sinalizações Entre CentraisDokument24 SeitenSS7 Métodos de Sinalizações Entre CentraisSauldavi IssacarNoch keine Bewertungen
- Revisão Modelagem Av2Dokument6 SeitenRevisão Modelagem Av2Wagner Witt100% (1)
- APOL 2 - Eletrônica de Potência - Nota 100Dokument3 SeitenAPOL 2 - Eletrônica de Potência - Nota 100luiz camargoNoch keine Bewertungen
- 6026 - Circuitos SequenciaisDokument11 Seiten6026 - Circuitos SequenciaisAna SousaNoch keine Bewertungen
- INFORMATICADokument65 SeitenINFORMATICAJoão Victor100% (1)
- Firebird - Backup e RestoreDokument11 SeitenFirebird - Backup e RestoreJeffersonNoch keine Bewertungen
- Microcontroladores 5º - Uma - 2022-2023 - Cap.1 - Introdução - V3Dokument65 SeitenMicrocontroladores 5º - Uma - 2022-2023 - Cap.1 - Introdução - V3Ndozi Rosário MiguelNoch keine Bewertungen
- LELO1 - Exp D12 2020fDokument12 SeitenLELO1 - Exp D12 2020fNathan SousaNoch keine Bewertungen
- Apol 04 Lógica de Programação e Algoritmo - UninterDokument5 SeitenApol 04 Lógica de Programação e Algoritmo - UninterDimas GuerreiroNoch keine Bewertungen
- Nintendo Switch Hacks - História, Glossário, Tutoriais e RespostasDokument44 SeitenNintendo Switch Hacks - História, Glossário, Tutoriais e RespostasDiego Lima100% (2)
- DS - BD-1943.Rev03 (PT)Dokument1 SeiteDS - BD-1943.Rev03 (PT)Suelen Barbosa Sdrill do BrasilNoch keine Bewertungen
- Manual Do Usuário AMT 2008 RF - Central de Alarme Monitorada Com 8 Zonas (4 + 4 Com Fio 8 Sem Fio) PortuguêsDokument147 SeitenManual Do Usuário AMT 2008 RF - Central de Alarme Monitorada Com 8 Zonas (4 + 4 Com Fio 8 Sem Fio) Portuguêsand_lima77Noch keine Bewertungen
- QUESTIONÁRIO GsoDokument2 SeitenQUESTIONÁRIO GsoSandra YamamotoNoch keine Bewertungen
- Roteiro 01 Sistemas Microprocessados 2023Dokument12 SeitenRoteiro 01 Sistemas Microprocessados 2023cijoNoch keine Bewertungen
- Livro RevitDokument464 SeitenLivro RevitinfoNoch keine Bewertungen
- Circuitos - Digitais - U1 - 01 - Introdução Aos Circuitos Digitais - Sistemas de Numeração e Circuitos AritimeticosDokument42 SeitenCircuitos - Digitais - U1 - 01 - Introdução Aos Circuitos Digitais - Sistemas de Numeração e Circuitos AritimeticosCelso CiamponiNoch keine Bewertungen
- Guia de TI 2022 6o EdicaoDokument42 SeitenGuia de TI 2022 6o EdicaoMayara SallesNoch keine Bewertungen
- Guia UsuarioDokument5 SeitenGuia Usuarioinox44Noch keine Bewertungen
- AV1 - Programação para Dispositivos MóveisDokument3 SeitenAV1 - Programação para Dispositivos MóveisFilipeLimaNoch keine Bewertungen
- Teste de ConhecimentoDokument5 SeitenTeste de ConhecimentoAnelizy FerreiraNoch keine Bewertungen
- Exp Lab Sistemas DigitaisDokument33 SeitenExp Lab Sistemas DigitaisautojhNoch keine Bewertungen
- BDQ AV2 Linguagem de ProgramaçãoDokument75 SeitenBDQ AV2 Linguagem de ProgramaçãoPaulo Vyctor100% (1)
- Exercícios HardwareDokument2 SeitenExercícios Hardwarejosiane de paula cruz da silvaNoch keine Bewertungen