Das könnte Ihnen auch gefallen
- Ejercicios - 18-02-23Dokument32 SeitenEjercicios - 18-02-23Jose Angel Arroyo DuranNoch keine Bewertungen
- Ejercicio 5.15 Diseño en Ingeniería Mecánica-ShigleyDokument6 SeitenEjercicio 5.15 Diseño en Ingeniería Mecánica-ShigleyMonserratTrejoNoch keine Bewertungen
- Ingeni3ro Romero DiseñoDokument11 SeitenIngeni3ro Romero DiseñoHarold Martinez100% (2)
- Dem01 - Santamaria Vela Alan Antonio Parte 2, Capitulo 12Dokument55 SeitenDem01 - Santamaria Vela Alan Antonio Parte 2, Capitulo 12Alan Antonio33% (3)
- Ejercicio NoDokument7 SeitenEjercicio NoGustavo Fuentes100% (1)
- Resolucion ResolucionDokument16 SeitenResolucion ResolucionCristian AlarconNoch keine Bewertungen
- Problema 13-16Dokument4 SeitenProblema 13-16José GómezNoch keine Bewertungen
- Análisis Dinámico de Mecanismos 2021-1 - Sesion6Dokument76 SeitenAnálisis Dinámico de Mecanismos 2021-1 - Sesion6Walter Raul Valentin AlvarezNoch keine Bewertungen
- Espectro electromagnético: características y aplicacionesDokument39 SeitenEspectro electromagnético: características y aplicacionesJorge Zerosh MartinezNoch keine Bewertungen
- Trabajo Integrador U1U2U3Dokument8 SeitenTrabajo Integrador U1U2U3Christian Daniel0% (1)
- Reactivo Ciclo Diesel FinalDokument15 SeitenReactivo Ciclo Diesel FinalMelanie PameNoch keine Bewertungen
- 001enganajes 2 4 PDF FreeDokument23 Seiten001enganajes 2 4 PDF FreeLuis AguilarNoch keine Bewertungen
- Análisis de esfuerzos y dimensionamiento de eje transmisorDokument12 SeitenAnálisis de esfuerzos y dimensionamiento de eje transmisorJorge AmparezNoch keine Bewertungen
- Actividades de Fuerzas 7° Basico LirimaDokument5 SeitenActividades de Fuerzas 7° Basico LirimaJenny Castro Jara100% (1)
- Lentes OftálmicasDokument29 SeitenLentes Oftálmicascatedra_unesco100% (4)
- Problemas de Tarea 3Dokument4 SeitenProblemas de Tarea 3Choque Villca JuanNoch keine Bewertungen
- Aceleración de un elevador exprésDokument9 SeitenAceleración de un elevador exprésYanerys PaulinoNoch keine Bewertungen
- Diagramas Cinemáticos y Grados de LibertadDokument2 SeitenDiagramas Cinemáticos y Grados de LibertadJorge Lara0% (2)
- Guia El Sonido y Sus CaracteristicasDokument3 SeitenGuia El Sonido y Sus Caracteristicaserika molinaresNoch keine Bewertungen
- Practica #2 - Ejes PDFDokument2 SeitenPractica #2 - Ejes PDFRoamir Basualdo RequeNoch keine Bewertungen
- PRÁCTICA N ElementosssDokument8 SeitenPRÁCTICA N ElementosssHedim D BrayanNoch keine Bewertungen
- U2 Actividad 1 ProblemarioDokument9 SeitenU2 Actividad 1 ProblemarioJorge Hernandez AnayaNoch keine Bewertungen
- Ejercicio 5Dokument3 SeitenEjercicio 5Ricardo Mendez0% (2)
- Cables MetálicosDokument19 SeitenCables MetálicosAlejandro ArteagaNoch keine Bewertungen
- Capitulo 2Dokument2 SeitenCapitulo 2IvanPeñaNoch keine Bewertungen
- Instrumento de Evaluación 2 Parcial Actividad 2Dokument5 SeitenInstrumento de Evaluación 2 Parcial Actividad 2Giovanni Vazquez JBNoch keine Bewertungen
- Diseño II - Tarea U-I PDFDokument5 SeitenDiseño II - Tarea U-I PDFsergioNoch keine Bewertungen
- Engranajes CónicosDokument5 SeitenEngranajes CónicosAlvaro Murillo TorresNoch keine Bewertungen
- Problema 35 ElementosDokument6 SeitenProblema 35 ElementosLeoAndresT50% (2)
- Ejercicio 17-19 (Solucion Analitica)Dokument7 SeitenEjercicio 17-19 (Solucion Analitica)Rösä LözänöNoch keine Bewertungen
- Ejercicios de Repaso 4Dokument8 SeitenEjercicios de Repaso 4Samanta MRSNoch keine Bewertungen
- Examen ParcialDokument6 SeitenExamen Parcialxd S:Noch keine Bewertungen
- Diseño de tren de engranes helicoidales y cónicosDokument13 SeitenDiseño de tren de engranes helicoidales y cónicosたましろ あきらNoch keine Bewertungen
- Bomba calor vehículo eléctrico R-134a 76.67g/sDokument2 SeitenBomba calor vehículo eléctrico R-134a 76.67g/sBrayan AvilesNoch keine Bewertungen
- Ejercicios Segunda Evaluación Diseño de elementos de máquinas 1Dokument2 SeitenEjercicios Segunda Evaluación Diseño de elementos de máquinas 1Emmanuel AlvarezNoch keine Bewertungen
- 2-32. Determine La Movilidad, La Condición de Grashof y La Clasificación de Barker Del Mecanismo Mostrado en La FiguraDokument6 Seiten2-32. Determine La Movilidad, La Condición de Grashof y La Clasificación de Barker Del Mecanismo Mostrado en La FiguraKarencitaCarriónClaudioNoch keine Bewertungen
- Mecanismo de 4 BarrasDokument4 SeitenMecanismo de 4 BarrasPablo Martin CadenaNoch keine Bewertungen
- DEBER UNIDAD 2 DiseñoDokument1 SeiteDEBER UNIDAD 2 DiseñoBoris EspinozaNoch keine Bewertungen
- Actividades Virtuales Electronica de Potencia I Semana 1Dokument8 SeitenActividades Virtuales Electronica de Potencia I Semana 1Hernan Camilo ContrerasNoch keine Bewertungen
- Nomenglatura de Engranajes 04-07Dokument14 SeitenNomenglatura de Engranajes 04-07ElvisNoch keine Bewertungen
- Problemas 10-7 y 10-13 ResueltosDokument3 SeitenProblemas 10-7 y 10-13 ResueltosJonathan UribeNoch keine Bewertungen
- Actividad GrupalDokument74 SeitenActividad GrupalKATY LISBETH MOROCHO GUACHONoch keine Bewertungen
- Análisis dinámico de fuerzas en un mecanismo de cuatro barras con corredera invertidaDokument4 SeitenAnálisis dinámico de fuerzas en un mecanismo de cuatro barras con corredera invertidaLuis VazquezNoch keine Bewertungen
- Análisis dinámico de mecanismos: Diagramas cinemáticos y grados de libertadDokument4 SeitenAnálisis dinámico de mecanismos: Diagramas cinemáticos y grados de libertadLuis Fernando Quispe SotoNoch keine Bewertungen
- Diseño de ejes sometidos a cargas estáticas y dinámicasDokument8 SeitenDiseño de ejes sometidos a cargas estáticas y dinámicashector papasNoch keine Bewertungen
- Línea Del Tiempo de La Vibración MecánicaDokument9 SeitenLínea Del Tiempo de La Vibración MecánicaLuis Fernando Victoria MartinezNoch keine Bewertungen
- Ejercicio 7-18 - GRUPO 6Dokument7 SeitenEjercicio 7-18 - GRUPO 6ANDRES ANTHONY ACOSTA ALVITRESNoch keine Bewertungen
- Segundo Previo Grupo BDokument1 SeiteSegundo Previo Grupo BJaider Vergel Pabon100% (1)
- Instituto Politécnico Nacional22Dokument5 SeitenInstituto Politécnico Nacional22daniNoch keine Bewertungen
- Guia #2 Elementos de SujecionDokument23 SeitenGuia #2 Elementos de SujecionArielMaldonado100% (1)
- Tablas ShigleyDokument3 SeitenTablas ShigleyJennyMaciasNoch keine Bewertungen
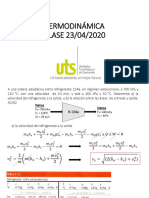
- Clase Termodinámica UtsDokument12 SeitenClase Termodinámica UtsPhillip BarnettaNoch keine Bewertungen
- Ejercicios VentiladoresDokument18 SeitenEjercicios VentiladoresTatiana BayonaNoch keine Bewertungen
- Análisis termodinámico de turbina de gas de doble eje en laboratorio de termodinámicaDokument8 SeitenAnálisis termodinámico de turbina de gas de doble eje en laboratorio de termodinámicaJonathan ProcelNoch keine Bewertungen
- Problemas Resueltos LevasDokument21 SeitenProblemas Resueltos LevasAngel JesúsNoch keine Bewertungen
- Generadores y motores de corriente directaDokument28 SeitenGeneradores y motores de corriente directajesus arvizuNoch keine Bewertungen
- Mecanismos - UTADokument6 SeitenMecanismos - UTAJeferson Eduardo MinchalaNoch keine Bewertungen
- Ejercicios DiseñoDokument9 SeitenEjercicios DiseñoedisonNoch keine Bewertungen
- Deber Mecanismos 3Dokument4 SeitenDeber Mecanismos 3esteban rameixNoch keine Bewertungen
- Tarea 2-2 TorsiónDokument4 SeitenTarea 2-2 TorsiónAdrián RodríguezNoch keine Bewertungen
- Diseño de eje soporte para piñón y engraneDokument6 SeitenDiseño de eje soporte para piñón y engraneDigna Bettin CuelloNoch keine Bewertungen
- Quinta Clase PDFDokument33 SeitenQuinta Clase PDFChrisTian AleXander Ulloa AvalosNoch keine Bewertungen
- DINÁMICA DE ROTACIÓN ProblemasDokument15 SeitenDINÁMICA DE ROTACIÓN ProblemasjasselyNoch keine Bewertungen
- Cap 16 - 51,91,133Dokument6 SeitenCap 16 - 51,91,133MOISES FERNANDO SEBASTIAN ZU�IGA CALDERONNoch keine Bewertungen
- Guia Didactica de Trabajo Decimo EstudiantesDokument5 SeitenGuia Didactica de Trabajo Decimo EstudiantesDelmer MesaNoch keine Bewertungen
- Gravitacion - Carlos Alberto Mújica SantillánDokument11 SeitenGravitacion - Carlos Alberto Mújica Santillángabo_btxNoch keine Bewertungen
- Práctica - Fibra ÓpticaDokument12 SeitenPráctica - Fibra ÓpticaYerSon ZuñigaNoch keine Bewertungen
- Taller de Recuperación Física 11º 3pDokument4 SeitenTaller de Recuperación Física 11º 3phimerj16Noch keine Bewertungen
- Cuerpos Negros y GrisesDokument4 SeitenCuerpos Negros y GrisesGiselle Escobedo CortijoNoch keine Bewertungen
- Problemas de FriccionDokument16 SeitenProblemas de FriccionAbdiel Zamorano100% (4)
- Sistemas ElectromecanicosDokument10 SeitenSistemas ElectromecanicosAlejandro MtzNoch keine Bewertungen
- Fisica C-MBDokument32 SeitenFisica C-MBDiego Salatiel Rivera ArmentaNoch keine Bewertungen
- Estudio experimental de la caída libre y determinación de la gravedad gDokument11 SeitenEstudio experimental de la caída libre y determinación de la gravedad gDavid GarayNoch keine Bewertungen
- Índice de Refracción - Wikipedia, La Enciclopedia LibreDokument3 SeitenÍndice de Refracción - Wikipedia, La Enciclopedia LibreRenzo PONoch keine Bewertungen
- Guia Onda PSUDokument12 SeitenGuia Onda PSUJose Fernandez AdellNoch keine Bewertungen
- Sesion 1 - Electronica y ElectricidadDokument35 SeitenSesion 1 - Electronica y ElectricidadNatha RojasNoch keine Bewertungen
- Escrito 3roDokument2 SeitenEscrito 3roEnrique ReyesNoch keine Bewertungen
- Problemas de caída libre y movimiento verticalDokument1 SeiteProblemas de caída libre y movimiento verticalRossy Pablo PerezNoch keine Bewertungen
- FÍSICA 2o BACHILLERATO PROBLEMAS MAGNETISMODokument2 SeitenFÍSICA 2o BACHILLERATO PROBLEMAS MAGNETISMO:)Noch keine Bewertungen
- Fotocélulas: Detección de objetos mediante luzDokument44 SeitenFotocélulas: Detección de objetos mediante luzAlberto Alonso Perez DiazNoch keine Bewertungen
- Electromagnetismo: Temas Selectos de Física IiDokument8 SeitenElectromagnetismo: Temas Selectos de Física IiJESUS FRANCISCO DUARTENoch keine Bewertungen
- TP 6 Ley de Faraday-LenzDokument6 SeitenTP 6 Ley de Faraday-Lenzspencer hastng0% (1)
- Fase - 6 ElectromagnetismosDokument22 SeitenFase - 6 ElectromagnetismosdubanNoch keine Bewertungen
- Clase10 IntroduccionDokument48 SeitenClase10 IntroduccionCarlos Andres Gutierrez BautistaNoch keine Bewertungen
- Teoría Del Láser 2Dokument86 SeitenTeoría Del Láser 2OscarHernándezGonzálezNoch keine Bewertungen
- MANEJO DEL REFRACTOMETRODokument18 SeitenMANEJO DEL REFRACTOMETROmaga100% (1)
- Caida Libre Trabajo de InvestigacionDokument14 SeitenCaida Libre Trabajo de Investigacionbrayan sanchez quispe50% (2)
- Guia de Onda 002Dokument2 SeitenGuia de Onda 002Marco Antonio WellisNoch keine Bewertungen
- Jaula de Faraday: bloqueo de señales eléctricasDokument4 SeitenJaula de Faraday: bloqueo de señales eléctricasGabrielNoch keine Bewertungen
- Tema 12 - Prospección Sísmica de RefracciónDokument12 SeitenTema 12 - Prospección Sísmica de RefracciónPabloMuller17100% (3)