Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Procurement Audit PlanDokument12 SeitenProcurement Audit PlanMustafa Bilal100% (1)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Oracle 10g InstallationDokument26 SeitenOracle 10g InstallationAbdul_Samad_3713Noch keine Bewertungen
- Primary KeyDokument4 SeitenPrimary KeyrvlganeshNoch keine Bewertungen
- A Fast Fingerprint Classification Algorithm by Tracing Ridge-Flow PatternsDokument4 SeitenA Fast Fingerprint Classification Algorithm by Tracing Ridge-Flow Patternsrvlganesh100% (1)
- CapitalsDokument5 SeitenCapitalsrvlganeshNoch keine Bewertungen
- Wenner PetranekDokument12 SeitenWenner PetranekrvlganeshNoch keine Bewertungen
- Andrews C145385 Shareholders DebriefDokument9 SeitenAndrews C145385 Shareholders DebriefmrdlbishtNoch keine Bewertungen
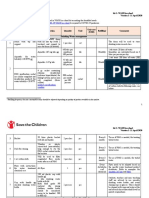
- Kit 2: Essential COVID-19 WASH in SchoolDokument8 SeitenKit 2: Essential COVID-19 WASH in SchooltamanimoNoch keine Bewertungen
- Types of Electrical Protection Relays or Protective RelaysDokument7 SeitenTypes of Electrical Protection Relays or Protective RelaysTushar SinghNoch keine Bewertungen
- Industrial Management: Teaching Scheme: Examination SchemeDokument2 SeitenIndustrial Management: Teaching Scheme: Examination SchemeJeet AmarsedaNoch keine Bewertungen
- Ewellery Ndustry: Presentation OnDokument26 SeitenEwellery Ndustry: Presentation Onharishgnr0% (1)
- Fammthya 000001Dokument87 SeitenFammthya 000001Mohammad NorouzzadehNoch keine Bewertungen
- Solutions To Questions - Chapter 6 Mortgages: Additional Concepts, Analysis, and Applications Question 6-1Dokument16 SeitenSolutions To Questions - Chapter 6 Mortgages: Additional Concepts, Analysis, and Applications Question 6-1--bolabolaNoch keine Bewertungen
- Catalog enDokument292 SeitenCatalog enSella KumarNoch keine Bewertungen
- CC Anbcc FD 002 Enr0Dokument5 SeitenCC Anbcc FD 002 Enr0ssierroNoch keine Bewertungen
- CW February 2013Dokument60 SeitenCW February 2013Clint FosterNoch keine Bewertungen
- 11 TR DSU - CarrierDokument1 Seite11 TR DSU - Carriercalvin.bloodaxe4478100% (1)
- Introduction To Radar Warning ReceiverDokument23 SeitenIntroduction To Radar Warning ReceiverPobitra Chele100% (1)
- Bench VortexDokument3 SeitenBench VortexRio FebriantoNoch keine Bewertungen
- Mutual Fund Insight Nov 2022Dokument214 SeitenMutual Fund Insight Nov 2022Sonic LabelsNoch keine Bewertungen
- The Voice of The Villages - December 2014Dokument48 SeitenThe Voice of The Villages - December 2014The Gayton Group of ParishesNoch keine Bewertungen
- Permit To Work Audit Checklist OctoberDokument3 SeitenPermit To Work Audit Checklist OctoberefeNoch keine Bewertungen
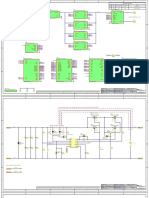
- Scheme Bidirectional DC-DC ConverterDokument16 SeitenScheme Bidirectional DC-DC ConverterNguyễn Quang KhoaNoch keine Bewertungen
- Mathematical Geophysics: Class One Amin KhalilDokument13 SeitenMathematical Geophysics: Class One Amin KhalilAmin KhalilNoch keine Bewertungen
- Tekla Structures ToturialsDokument35 SeitenTekla Structures ToturialsvfmgNoch keine Bewertungen
- Drug Study TemplateDokument2 SeitenDrug Study TemplateKistlerzane CABALLERONoch keine Bewertungen
- To Syed Ubed - For UpdationDokument1 SeiteTo Syed Ubed - For Updationshrikanth5singhNoch keine Bewertungen
- 1 s2.0 S0304389421026054 MainDokument24 Seiten1 s2.0 S0304389421026054 MainFarah TalibNoch keine Bewertungen
- Alphacenter Utilities: Installation GuideDokument24 SeitenAlphacenter Utilities: Installation GuideJeffersoOnn JulcamanyanNoch keine Bewertungen
- Business-Model Casual Cleaning ServiceDokument1 SeiteBusiness-Model Casual Cleaning ServiceRudiny FarabyNoch keine Bewertungen
- Ks 1609Dokument5 SeitenKs 1609krish dabhiNoch keine Bewertungen
- Math 1 6Dokument45 SeitenMath 1 6Dhamar Hanania Ashari100% (1)
- WhatsNew 2019 enDokument48 SeitenWhatsNew 2019 enAdrian Martin BarrionuevoNoch keine Bewertungen
- Learner Guide HDB Resale Procedure and Financial Plan - V2Dokument0 SeitenLearner Guide HDB Resale Procedure and Financial Plan - V2wangks1980Noch keine Bewertungen
- Expected MCQs CompressedDokument31 SeitenExpected MCQs CompressedAdithya kesavNoch keine Bewertungen