Das könnte Ihnen auch gefallen
- Color Object DetectionDokument6 SeitenColor Object DetectionEngr EbiNoch keine Bewertungen
- Multi-Stage Automatic License Plate Location & Recognition: A B A BDokument26 SeitenMulti-Stage Automatic License Plate Location & Recognition: A B A Bapi-26400509Noch keine Bewertungen
- Simple LPRDokument9 SeitenSimple LPRapi-26400509100% (1)
- SimpleLPR PDFDokument9 SeitenSimpleLPR PDFBarack ObamaNoch keine Bewertungen
- Automatic Licence Plate RecognitionDokument9 SeitenAutomatic Licence Plate RecognitionAnshu Man100% (1)
- Real-Time Stereo Vision For Urban Traffic Scene UnderstandingDokument6 SeitenReal-Time Stereo Vision For Urban Traffic Scene UnderstandingBasilNoch keine Bewertungen
- R Eal T Ime L Icense P Late R Ecognition S YstemDokument5 SeitenR Eal T Ime L Icense P Late R Ecognition S YstemIvánPortillaNoch keine Bewertungen
- Research PaperDokument7 SeitenResearch PaperAqsa KiranNoch keine Bewertungen
- Algorithm For License Plate Localization and Recognition For Tanzania Car Plate NumbersDokument5 SeitenAlgorithm For License Plate Localization and Recognition For Tanzania Car Plate NumbersIsack BuluguNoch keine Bewertungen
- Improved Method For License Plate Recognition For Indian Road ConditionsDokument5 SeitenImproved Method For License Plate Recognition For Indian Road ConditionsInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Car License Plate Recognition With Neural Networks and Fuzzy Log PDFDokument5 SeitenCar License Plate Recognition With Neural Networks and Fuzzy Log PDFestherNoch keine Bewertungen
- Smart Cameras in Embedded SystemsDokument22 SeitenSmart Cameras in Embedded SystemsLovey SalujaNoch keine Bewertungen
- Speeding Up Probabilistic Algorithms Applied To Mobile Robotics Using Fpga Based Reconfigurable ArchitecturesDokument4 SeitenSpeeding Up Probabilistic Algorithms Applied To Mobile Robotics Using Fpga Based Reconfigurable ArchitecturesSergio CruzNoch keine Bewertungen
- Automatic Arabic Number Plate RecognitionDokument7 SeitenAutomatic Arabic Number Plate Recognitiondata studioNoch keine Bewertungen
- Vehicle License Plate Segmentation in Natural ImagesDokument8 SeitenVehicle License Plate Segmentation in Natural Imagesapi-26400509Noch keine Bewertungen
- A Morphological-Based License Plate Location: Farhad Faradji, Amir Hossein Rezaie, Majid ZiaratbanDokument4 SeitenA Morphological-Based License Plate Location: Farhad Faradji, Amir Hossein Rezaie, Majid Ziaratbanapi-26400509Noch keine Bewertungen
- Marker Detection For Augmented Reality Applications: Martin HirzerDokument27 SeitenMarker Detection For Augmented Reality Applications: Martin HirzerSarra JmailNoch keine Bewertungen
- 2004 - Menezes de Sequeira, Brandão, Albuquerque - Evaluation of License-Plate Location AlgorithmsDokument4 Seiten2004 - Menezes de Sequeira, Brandão, Albuquerque - Evaluation of License-Plate Location AlgorithmsManuel Menezes de SequeiraNoch keine Bewertungen
- Object Tracking SystemDokument6 SeitenObject Tracking SystemSimadri BadatyaNoch keine Bewertungen
- License Plate Recognition From Low-Quality VideosDokument4 SeitenLicense Plate Recognition From Low-Quality VideosMukesh WarrierNoch keine Bewertungen
- A Novel Multiple License Plate Extraction Technique For Complex Background in Indian Traffic ConditionsDokument13 SeitenA Novel Multiple License Plate Extraction Technique For Complex Background in Indian Traffic ConditionsVighneshwara UpadhyaNoch keine Bewertungen
- Car License Plate Recognition With Neural Networks and Fuzzy LogicDokument5 SeitenCar License Plate Recognition With Neural Networks and Fuzzy LogicDivyang PatelNoch keine Bewertungen
- An Approach To Licence Plate Recognition: J.R. Parker Pavol FederlDokument5 SeitenAn Approach To Licence Plate Recognition: J.R. Parker Pavol FederlMed BouhirmaniNoch keine Bewertungen
- License Plate Recognition System Based On Image Processing Using LabviewDokument6 SeitenLicense Plate Recognition System Based On Image Processing Using LabviewJess ChanceNoch keine Bewertungen
- Car Plate Recognition by Neural Networks and Image ProcessingDokument4 SeitenCar Plate Recognition by Neural Networks and Image ProcessingIsrin RamdhaniNoch keine Bewertungen
- FPGA Based Accelerator For Visual Features Detection PDFDokument6 SeitenFPGA Based Accelerator For Visual Features Detection PDFBoppidiSrikanthNoch keine Bewertungen
- A Robust License-Plate Extraction Method Under Complex Image ConditionsDokument4 SeitenA Robust License-Plate Extraction Method Under Complex Image ConditionsJames Yu100% (1)
- Smearing Algorithm For Vehicle Parking Management SystemDokument7 SeitenSmearing Algorithm For Vehicle Parking Management SystemAngeline LoritaNoch keine Bewertungen
- IJCRT22A6694Dokument4 SeitenIJCRT22A6694Mina FadiNoch keine Bewertungen
- The Review On Automatic License Plate Recognition (Alpr)Dokument6 SeitenThe Review On Automatic License Plate Recognition (Alpr)esatjournalsNoch keine Bewertungen
- New Approach To Similarity Detection by Combining Technique Three-Patch Local Binary Patterns (TP-LBP) With Support Vector MachineDokument10 SeitenNew Approach To Similarity Detection by Combining Technique Three-Patch Local Binary Patterns (TP-LBP) With Support Vector MachineIAES IJAINoch keine Bewertungen
- Synthetic Aperture Radar (SAR) Imaging UsingGlobal Back Projection (GBP) Algorithm ForAirborne Radar SystemsDokument6 SeitenSynthetic Aperture Radar (SAR) Imaging UsingGlobal Back Projection (GBP) Algorithm ForAirborne Radar SystemsAshish BhardwajNoch keine Bewertungen
- License Plate Detction Using ArdiunoDokument50 SeitenLicense Plate Detction Using Ardiunobvkarthik2711Noch keine Bewertungen
- Marker Detection For Augmented Reality Applications: Martin HirzerDokument27 SeitenMarker Detection For Augmented Reality Applications: Martin HirzerMohamad YusronNoch keine Bewertungen
- An Improved Camshift Algorithm For Target Tracking in Video SurveillanceDokument10 SeitenAn Improved Camshift Algorithm For Target Tracking in Video SurveillanceWilson RosasNoch keine Bewertungen
- Iterated Graph Cuts For Image SegmentationDokument10 SeitenIterated Graph Cuts For Image Segmentationankit407Noch keine Bewertungen
- Methods Ofautomaticlicenseplaterecognition: A ReviewDokument4 SeitenMethods Ofautomaticlicenseplaterecognition: A ReviewInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Assignment-2:DIP: Mr. Victor Mageto CP10101610245Dokument10 SeitenAssignment-2:DIP: Mr. Victor Mageto CP10101610245Vijayendravarma DanduNoch keine Bewertungen
- Automatic Indian Vehicle License Plate RecognitionDokument4 SeitenAutomatic Indian Vehicle License Plate Recognitionmyk259Noch keine Bewertungen
- The Real Time Vechicle License Plate Identification System: P.Mohan Kumar, P.Kumaresan, Dr.S.A.K.JilaniDokument5 SeitenThe Real Time Vechicle License Plate Identification System: P.Mohan Kumar, P.Kumaresan, Dr.S.A.K.JilaniIJERDNoch keine Bewertungen
- Automatic & Robust Vehicle License Number Plate Recognition System (Electronics Project)Dokument5 SeitenAutomatic & Robust Vehicle License Number Plate Recognition System (Electronics Project)Vishal AgnihotriNoch keine Bewertungen
- Stereo Video Processing For Depth Map: Harlan Hile and Colin ZhengDokument8 SeitenStereo Video Processing For Depth Map: Harlan Hile and Colin Zhengajnabee4u18100% (2)
- Robot VisionDokument6 SeitenRobot VisionHaydee Tu Ya SabesNoch keine Bewertungen
- Tempered Image DetectionDokument6 SeitenTempered Image DetectionjkumardkNoch keine Bewertungen
- Aghamohammadixxx PDFDokument6 SeitenAghamohammadixxx PDFhenrydclNoch keine Bewertungen
- SJoinIn Hierarchical Filter and Refine On CPU-GPU HiPC2019 SPuriDokument11 SeitenSJoinIn Hierarchical Filter and Refine On CPU-GPU HiPC2019 SPuriKavyaShekarNoch keine Bewertungen
- An Efficient System For Automatic Sorting of The Ceramic TilesDokument3 SeitenAn Efficient System For Automatic Sorting of The Ceramic TilesMekaTronNoch keine Bewertungen
- Using Mean-Shift Tracking Algorithms For Real-Time Tracking of Moving Images On An Autonomous Vehicle Testbed PlatformDokument10 SeitenUsing Mean-Shift Tracking Algorithms For Real-Time Tracking of Moving Images On An Autonomous Vehicle Testbed PlatformRe HoNoch keine Bewertungen
- A Hybrid License Plate Extraction Method Based On Edge Statistics and MorphologyDokument4 SeitenA Hybrid License Plate Extraction Method Based On Edge Statistics and MorphologySathish KumarNoch keine Bewertungen
- Blind License Plate Detection: Max Guise Stephan GoupilleDokument4 SeitenBlind License Plate Detection: Max Guise Stephan GoupilleAnwar ZahroniNoch keine Bewertungen
- Localization Data Fusion RobotinoDokument8 SeitenLocalization Data Fusion RobotinoAlexandre RibeiroNoch keine Bewertungen
- An Advanced Canny Edge Detector and Its Implementation On Xilinx FpgaDokument7 SeitenAn Advanced Canny Edge Detector and Its Implementation On Xilinx FpgalambanaveenNoch keine Bewertungen
- Feature Extraction For Autonomous Ro Bot Navigation in Urban Environme NtsDokument8 SeitenFeature Extraction For Autonomous Ro Bot Navigation in Urban Environme NtsDouglas IsraelNoch keine Bewertungen
- Integrated System For Robot Control Based On Traffic Sign RecognitionDokument6 SeitenIntegrated System For Robot Control Based On Traffic Sign RecognitionlambanaveenNoch keine Bewertungen
- An Efficient Way of Detecting A Numbers in Car License Plate Using Genetic AlgorithmsDokument6 SeitenAn Efficient Way of Detecting A Numbers in Car License Plate Using Genetic AlgorithmsiaetsdiaetsdNoch keine Bewertungen
- CoreSLAM A SLAM Algorithm in Less Than 200 Lines oDokument7 SeitenCoreSLAM A SLAM Algorithm in Less Than 200 Lines ohuzaifarehan09Noch keine Bewertungen
- A Distributed Canny Edge Detector and Its Implementation On F PGADokument5 SeitenA Distributed Canny Edge Detector and Its Implementation On F PGAInternational Journal of computational Engineering research (IJCER)Noch keine Bewertungen
- Iris V9Dokument26 SeitenIris V9arakhalNoch keine Bewertungen
- Scale Invariant Feature Transform: Unveiling the Power of Scale Invariant Feature Transform in Computer VisionVon EverandScale Invariant Feature Transform: Unveiling the Power of Scale Invariant Feature Transform in Computer VisionNoch keine Bewertungen
- 2006 - Zenida Et Al. - Zás - Aspect-Oriented Authorization ServicesDokument8 Seiten2006 - Zenida Et Al. - Zás - Aspect-Oriented Authorization ServicesManuel Menezes de SequeiraNoch keine Bewertungen
- 2004 - Menezes de Sequeira, Brandão, Albuquerque - Evaluation of License-Plate Location AlgorithmsDokument4 Seiten2004 - Menezes de Sequeira, Brandão, Albuquerque - Evaluation of License-Plate Location AlgorithmsManuel Menezes de SequeiraNoch keine Bewertungen
- 1995 - Cortez, Menezes de Sequeira, Pereira - Classification and Coding of Contour InformationDokument10 Seiten1995 - Cortez, Menezes de Sequeira, Pereira - Classification and Coding of Contour InformationManuel Menezes de SequeiraNoch keine Bewertungen
- 1993 - Barreiros Et Al. - Modeling and Simulation of Structured Packing Column Distillation (OCR, Outro)Dokument8 Seiten1993 - Barreiros Et Al. - Modeling and Simulation of Structured Packing Column Distillation (OCR, Outro)Manuel Menezes de SequeiraNoch keine Bewertungen
- Prince Ryan B. Camarino Introduction To Philosophy of The Human PersonDokument2 SeitenPrince Ryan B. Camarino Introduction To Philosophy of The Human PersonKyle Aureo Andagan RamisoNoch keine Bewertungen
- Rural Marketing MergedDokument146 SeitenRural Marketing MergedRishabh HemaniNoch keine Bewertungen
- Preparatory Newsletter No 3 2013Dokument22 SeitenPreparatory Newsletter No 3 2013SJC AdminNoch keine Bewertungen
- Asia Pacific SAR Plan V2.0Dokument38 SeitenAsia Pacific SAR Plan V2.0Joci SimõesNoch keine Bewertungen
- 6 1 Maxima and MinimaDokument10 Seiten6 1 Maxima and MinimaSebastian GarciaNoch keine Bewertungen
- Moodle2Word Word Template: Startup Menu: Supported Question TypesDokument6 SeitenMoodle2Word Word Template: Startup Menu: Supported Question TypesinamNoch keine Bewertungen
- DRUG STUDY (Erythromycin)Dokument3 SeitenDRUG STUDY (Erythromycin)Avianna CalliopeNoch keine Bewertungen
- POLAR BEARS-Biology ProjectDokument16 SeitenPOLAR BEARS-Biology Projectserwaa21Noch keine Bewertungen
- Micromine TutorialDokument5 SeitenMicromine TutorialFerdinand Siahaan100% (1)
- Circuit Breaker - Ground & Test Device Type VR Electrically OperatedDokument24 SeitenCircuit Breaker - Ground & Test Device Type VR Electrically OperatedcadtilNoch keine Bewertungen
- SIRMDokument9 SeitenSIRMshailendra369Noch keine Bewertungen
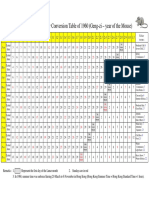
- Gregorian-Lunar Calendar Conversion Table of 1960 (Geng-Zi - Year of The Mouse)Dokument1 SeiteGregorian-Lunar Calendar Conversion Table of 1960 (Geng-Zi - Year of The Mouse)Anomali SahamNoch keine Bewertungen
- Continuous Improvement SYMPOSIUM SCRIPTDokument3 SeitenContinuous Improvement SYMPOSIUM SCRIPTChanda Marie AsedillaNoch keine Bewertungen
- New Arrivals 17 - 08 - 2021Dokument16 SeitenNew Arrivals 17 - 08 - 2021polar necksonNoch keine Bewertungen
- The Status of The Translation ProfessionDokument172 SeitenThe Status of The Translation ProfessionVeaceslav MusteataNoch keine Bewertungen
- Heat and Mass Chapter 2Dokument49 SeitenHeat and Mass Chapter 2Mvelo PhungulaNoch keine Bewertungen
- I. Errors, Mistakes, Accuracy and Precision of Data Surveyed. A. ErrorsDokument53 SeitenI. Errors, Mistakes, Accuracy and Precision of Data Surveyed. A. ErrorsJETT WAPNoch keine Bewertungen
- List of Marketing Metrics and KpisDokument5 SeitenList of Marketing Metrics and KpisThe KPI Examples ReviewNoch keine Bewertungen
- 2018-3-27 MIDAS Civil Presentation Curved BridgesDokument57 Seiten2018-3-27 MIDAS Civil Presentation Curved BridgesShishir Kumar NayakNoch keine Bewertungen
- A Review of Automatic License Plate Recognition System in Mobile-Based PlatformDokument6 SeitenA Review of Automatic License Plate Recognition System in Mobile-Based PlatformadiaNoch keine Bewertungen
- Abbreviations For O&G IndustryDokument38 SeitenAbbreviations For O&G IndustryMike George MeyerNoch keine Bewertungen
- Secondary Scheme of Work Form 2Dokument163 SeitenSecondary Scheme of Work Form 2Fariha RismanNoch keine Bewertungen
- 1 Raven's™ Standard Progressive Matrices Plus (SPM Plus) - PSI OnlineDokument1 Seite1 Raven's™ Standard Progressive Matrices Plus (SPM Plus) - PSI OnlineVINEET GAIROLANoch keine Bewertungen
- Power Systems (K-Wiki - CH 4 - Stability)Dokument32 SeitenPower Systems (K-Wiki - CH 4 - Stability)Priyanshu GuptaNoch keine Bewertungen
- Apc 10kva Ups ManualDokument36 SeitenApc 10kva Ups Manualraj rajNoch keine Bewertungen
- Design and Fabrication of Light Electric VehicleDokument14 SeitenDesign and Fabrication of Light Electric VehicleAshish NegiNoch keine Bewertungen
- Tasha Giles: WebsiteDokument1 SeiteTasha Giles: Websiteapi-395325861Noch keine Bewertungen
- Etymological Wordplay in Ovid's Pyramus and ThisbeDokument5 SeitenEtymological Wordplay in Ovid's Pyramus and Thisbeignoramus83Noch keine Bewertungen
- Syllabus (2020) : NTA UGC-NET Computer Science and ApplicationsDokument24 SeitenSyllabus (2020) : NTA UGC-NET Computer Science and ApplicationsDiksha NagpalNoch keine Bewertungen
- Annex A2 - CS Form 100 - Revised 2023 - CSESP - A1 - Edited - A1Dokument2 SeitenAnnex A2 - CS Form 100 - Revised 2023 - CSESP - A1 - Edited - A1obs.obando2022Noch keine Bewertungen