Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Internship PPT On SAP-ABAPDokument22 SeitenInternship PPT On SAP-ABAPAnushka Choudhary0% (1)
- Sine Wave Inverter SchematicsDokument7 SeitenSine Wave Inverter Schematicshpoerbaya100% (1)
- Math 1010 - Exam 1 CorrectionsDokument4 SeitenMath 1010 - Exam 1 Correctionsapi-260896346Noch keine Bewertungen
- En 30039205v020200oDokument271 SeitenEn 30039205v020200oJesús María García BuenoNoch keine Bewertungen
- Unit 7 EditedDokument32 SeitenUnit 7 EditedtadyNoch keine Bewertungen
- ChatGPT & EducationDokument47 SeitenChatGPT & EducationAn Lê Trường88% (8)
- Order Form - Biznet Dedicated Internet Maret 2020Dokument11 SeitenOrder Form - Biznet Dedicated Internet Maret 2020Wendi SopianNoch keine Bewertungen
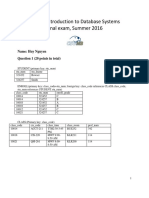
- CST363 Final Exam HuyNguyenDokument9 SeitenCST363 Final Exam HuyNguyenHuy NguyenNoch keine Bewertungen
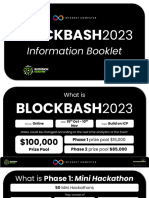
- Blockbash 2023 DocumentDokument14 SeitenBlockbash 2023 DocumentNoch keine Bewertungen
- DIODES - Total Solutions For NB Application 20100304 PDFDokument36 SeitenDIODES - Total Solutions For NB Application 20100304 PDFsorintvrNoch keine Bewertungen
- Electrical Design ProcessDokument6 SeitenElectrical Design ProcessUsha HaNoch keine Bewertungen
- ReadmeDokument1 SeiteReadmemecadcNoch keine Bewertungen
- PRO800 ES EL Datasheet 20210519Dokument2 SeitenPRO800 ES EL Datasheet 20210519john wardNoch keine Bewertungen
- Network Virtualization Dummies GuideDokument81 SeitenNetwork Virtualization Dummies GuideUmme KulsumNoch keine Bewertungen
- CH-0037-19 - NOKIA Chile RevCDokument13 SeitenCH-0037-19 - NOKIA Chile RevCjmccardenasNoch keine Bewertungen
- Kodi 17 Iptv GuideDokument13 SeitenKodi 17 Iptv Guidesuljo atlagicNoch keine Bewertungen
- Test Bank For Introduction To Java Programming Comprehensive Version 10Th Edition Liang 0133761312 9780133761313 Full Chapter PDFDokument36 SeitenTest Bank For Introduction To Java Programming Comprehensive Version 10Th Edition Liang 0133761312 9780133761313 Full Chapter PDFjessica.talaga212100% (10)
- Kumbharana CK Thesis CsDokument243 SeitenKumbharana CK Thesis CsYadu KrishnanNoch keine Bewertungen
- Product Manual 26727 (Revision V, 5/2021) : Varistroke-I (Vs-I) Electro-Hydraulic ActuatorDokument152 SeitenProduct Manual 26727 (Revision V, 5/2021) : Varistroke-I (Vs-I) Electro-Hydraulic ActuatorFredi F FNoch keine Bewertungen
- MFL69729932 00 Q S02-1Dokument45 SeitenMFL69729932 00 Q S02-1Kendrick ManaloNoch keine Bewertungen
- LOGO! Analog Input PT100 ManualDokument6 SeitenLOGO! Analog Input PT100 ManualKhurram100% (3)
- Abe 14 Activity Module 4Dokument9 SeitenAbe 14 Activity Module 4Erman DeanoNoch keine Bewertungen
- P Pap Guidelines 6190 Rev 3Dokument5 SeitenP Pap Guidelines 6190 Rev 3Reshu RaiNoch keine Bewertungen
- Ztransform AppDokument5 SeitenZtransform AppSyed Ali RazaNoch keine Bewertungen
- Meteor F8 FR9 ManualDokument29 SeitenMeteor F8 FR9 ManualAceNoch keine Bewertungen
- Under Ground Cable Fault Detection Using IOT-1Dokument22 SeitenUnder Ground Cable Fault Detection Using IOT-1Sarath V PradheepNoch keine Bewertungen
- Poweredge r910 Technical GuideDokument78 SeitenPoweredge r910 Technical GuidePhani KumarNoch keine Bewertungen
- 7085 SolutionDokument87 Seiten7085 SolutionTaseer IqbalNoch keine Bewertungen
- Round Your Answer Off To 4 Decimal Places: 2 PointsDokument4 SeitenRound Your Answer Off To 4 Decimal Places: 2 PointsPam MshweshweNoch keine Bewertungen
- Abstract 1Dokument3 SeitenAbstract 1Tripathi OjNoch keine Bewertungen