Das könnte Ihnen auch gefallen
- To Dmaic or Not To DmaicDokument1 SeiteTo Dmaic or Not To Dmaicritch99Noch keine Bewertungen
- Design and Implementation of A Parallel Priority Queue On Many-Core ArchitecturesDokument10 SeitenDesign and Implementation of A Parallel Priority Queue On Many-Core Architecturesfonseca_rNoch keine Bewertungen
- tt130 Ultrasonic Wall Thickness Material Thickness Gauge Instruction Manual PDFDokument20 Seitentt130 Ultrasonic Wall Thickness Material Thickness Gauge Instruction Manual PDFelmek jayaNoch keine Bewertungen
- Planning and Site Investigation in TunnellingDokument6 SeitenPlanning and Site Investigation in TunnellingJean DalyNoch keine Bewertungen
- Case Study On: Nitte Meenakshi Institute of TechologyDokument8 SeitenCase Study On: Nitte Meenakshi Institute of TechologyyogeshNoch keine Bewertungen
- Case Study On: Nitte Meenakshi Institute of TechnologyDokument8 SeitenCase Study On: Nitte Meenakshi Institute of TechnologyyogeshNoch keine Bewertungen
- CA Assignment #2Dokument3 SeitenCA Assignment #2Chachu-420Noch keine Bewertungen
- Rubio Campillo2018Dokument3 SeitenRubio Campillo2018AimanNoch keine Bewertungen
- Potential Approaches To Parallel Computation of Rayleigh Integrals in Measuring Acoustic Pressure and IntensityDokument5 SeitenPotential Approaches To Parallel Computation of Rayleigh Integrals in Measuring Acoustic Pressure and Intensityblhblh123Noch keine Bewertungen
- Cpu Gpu SystemDokument26 SeitenCpu Gpu SystemsadikNoch keine Bewertungen
- Survey On Minimal Implementation of Clustering Using Virtual MachinesDokument12 SeitenSurvey On Minimal Implementation of Clustering Using Virtual MachinesEshwar NorthEastNoch keine Bewertungen
- Chapter 1Dokument25 SeitenChapter 1chinmayNoch keine Bewertungen
- Computação ParalelaDokument18 SeitenComputação ParalelaGuilherme AlminhanaNoch keine Bewertungen
- 8 Things You Should Know About GPGPU Technology: Q&A With TACC Research ScientistsDokument2 Seiten8 Things You Should Know About GPGPU Technology: Q&A With TACC Research ScientistsAshish SharmaNoch keine Bewertungen
- A GPGPU Compiler For Memory Optimization And: Parallelism ManagementDokument12 SeitenA GPGPU Compiler For Memory Optimization And: Parallelism ManagementhiraNoch keine Bewertungen
- Introduction FinalDokument5 SeitenIntroduction Finalsughra afzaliNoch keine Bewertungen
- Gemini Enabling Multi-Tenant GPU Sharing Based On Kernel Burst EstimationDokument14 SeitenGemini Enabling Multi-Tenant GPU Sharing Based On Kernel Burst EstimationlizarrdNoch keine Bewertungen
- 3 Gpgpu PDFDokument11 Seiten3 Gpgpu PDFhiraNoch keine Bewertungen
- A Survey of Performance Modeling and Simulation Techniques For Accelerator-Based ComputingDokument10 SeitenA Survey of Performance Modeling and Simulation Techniques For Accelerator-Based ComputingMiguel Ramírez CarrilloNoch keine Bewertungen
- Performance and Power Comparisons of MPI Vs Pthread Implementations On Multicore SystemsDokument7 SeitenPerformance and Power Comparisons of MPI Vs Pthread Implementations On Multicore SystemsMuhammad EahteshamNoch keine Bewertungen
- Grid Computing: Techniques and Applications Barry WilkinsonDokument34 SeitenGrid Computing: Techniques and Applications Barry WilkinsonKali DasNoch keine Bewertungen
- Csit3913 PDFDokument12 SeitenCsit3913 PDFDeivid CArpioNoch keine Bewertungen
- Cluster Computing: DATE: 28 November 2013Dokument32 SeitenCluster Computing: DATE: 28 November 2013Hasan BadirNoch keine Bewertungen
- Dynamic Load Balancing On Single-And Multi-GPU SystemsDokument12 SeitenDynamic Load Balancing On Single-And Multi-GPU Systemsx2y2z2rmNoch keine Bewertungen
- Theoretical Study Based Analysis On The Facets of MPI in Parallel ComputingDokument4 SeitenTheoretical Study Based Analysis On The Facets of MPI in Parallel ComputingAnthony FelderNoch keine Bewertungen
- A New Approach For Parallel Region Growing Algorithm in Image Segmentation Using MATLAB On GPU ArchitectureDokument5 SeitenA New Approach For Parallel Region Growing Algorithm in Image Segmentation Using MATLAB On GPU ArchitecturePournamy RameezNoch keine Bewertungen
- Grid Computing: T A S K 8Dokument25 SeitenGrid Computing: T A S K 8navecgNoch keine Bewertungen
- Comp Arch Project 2 FinalDokument29 SeitenComp Arch Project 2 FinalArchitNoch keine Bewertungen
- Dynamic Data Management AmongDokument11 SeitenDynamic Data Management AmongCS & ITNoch keine Bewertungen
- Gpgpu Workshop CudaDokument10 SeitenGpgpu Workshop CudaYohannes BekeleNoch keine Bewertungen
- GPU Verification Iccad18-GpuDokument8 SeitenGPU Verification Iccad18-GpuRNoch keine Bewertungen
- Research Paper On GpuDokument8 SeitenResearch Paper On Gpursbptyplg100% (1)
- Com 419 - CSD - Cat 2 2023Dokument5 SeitenCom 419 - CSD - Cat 2 2023vimintiuasNoch keine Bewertungen
- Research Article: Hybrid MPI and CUDA Parallelization For CFD Applications On Multi-GPU HPC ClustersDokument15 SeitenResearch Article: Hybrid MPI and CUDA Parallelization For CFD Applications On Multi-GPU HPC Clusterszhaojie qinNoch keine Bewertungen
- Sum Product PaperDokument10 SeitenSum Product PaperpeoriditoNoch keine Bewertungen
- Exploiting Dynamic Resource Allocation For Efficient Parallel Data Processing in Cloud-By Using Nephel's AlgorithmDokument3 SeitenExploiting Dynamic Resource Allocation For Efficient Parallel Data Processing in Cloud-By Using Nephel's Algorithmanon_977232852Noch keine Bewertungen
- Experiment No. 1: Aim: TheoryDokument30 SeitenExperiment No. 1: Aim: TheorySoham BilolikarNoch keine Bewertungen
- Detecting Bottlenecks in Parallel DAG-based Data Flow ProgramsDokument10 SeitenDetecting Bottlenecks in Parallel DAG-based Data Flow Programsanudhull1910Noch keine Bewertungen
- Name:: Abdulhannan KhawajaDokument6 SeitenName:: Abdulhannan KhawajaSAMAR BUTTNoch keine Bewertungen
- Grid Computing As Virtual Supercomputing: Paper Presented byDokument6 SeitenGrid Computing As Virtual Supercomputing: Paper Presented bysunny_deshmukh_3Noch keine Bewertungen
- Scaling Distributed Machine Learning With In-Network AggregationDokument25 SeitenScaling Distributed Machine Learning With In-Network AggregationElton Chen-Yu HoNoch keine Bewertungen
- Mics2010 Submission 13Dokument12 SeitenMics2010 Submission 13Materi MikomNoch keine Bewertungen
- Quantitative Study of Irregular Programs On GPUsDokument10 SeitenQuantitative Study of Irregular Programs On GPUsJash KhatriNoch keine Bewertungen
- An Analytical Model For A GPU Architecture With Memory-Level and Thread-Level Parallelism AwarenessDokument12 SeitenAn Analytical Model For A GPU Architecture With Memory-Level and Thread-Level Parallelism Awarenessanon1Noch keine Bewertungen
- PPL Gpu Sorting Pre PrintDokument28 SeitenPPL Gpu Sorting Pre PrintTrần Bá HiểnNoch keine Bewertungen
- Pawan 09 Graph AlgorithmsDokument26 SeitenPawan 09 Graph Algorithmsgorot1Noch keine Bewertungen
- Power Efficient Design of High-Performance ConvoluDokument14 SeitenPower Efficient Design of High-Performance ConvoluAhmed EmadNoch keine Bewertungen
- Designing Efficient Sorting Algorithms For Manycore Gpus: NtroductionDokument10 SeitenDesigning Efficient Sorting Algorithms For Manycore Gpus: NtroductionaruishawgNoch keine Bewertungen
- Gpucc: An Open-Source GPGPU CompilerDokument12 SeitenGpucc: An Open-Source GPGPU CompilerhiraNoch keine Bewertungen
- Nvidia Tesla GpuDokument12 SeitenNvidia Tesla Gpuapi-12797690Noch keine Bewertungen
- Schedubality - FullDocDokument57 SeitenSchedubality - FullDocbhavadharaniNoch keine Bewertungen
- 2012 - Kiss Et Al. - Parallel Realization of The Element-By-element FEM Technique by CUDADokument4 Seiten2012 - Kiss Et Al. - Parallel Realization of The Element-By-element FEM Technique by CUDAThiago de SousaNoch keine Bewertungen
- Efficient Datapath Merging For Partially Reconfigurable ArchitecturesDokument12 SeitenEfficient Datapath Merging For Partially Reconfigurable ArchitecturesHacı AxundzadəNoch keine Bewertungen
- Ijirt147527 PaperDokument6 SeitenIjirt147527 PaperPI CubingNoch keine Bewertungen
- Dfrws2007 GpuDokument10 SeitenDfrws2007 GpuJobert AdonaNoch keine Bewertungen
- HHS Public AccessDokument30 SeitenHHS Public AccessAnis BourouNoch keine Bewertungen
- C R A M: Ompression For EAL Time Pplications EdiaDokument4 SeitenC R A M: Ompression For EAL Time Pplications EdiaJair Vasquez RiosNoch keine Bewertungen
- Performance Modeling of Reconfigurable Distributed Systems Based On The OpenSPARC FPGA Board and The SIRC Communication FrameworkDokument7 SeitenPerformance Modeling of Reconfigurable Distributed Systems Based On The OpenSPARC FPGA Board and The SIRC Communication FrameworkKevin ThomasNoch keine Bewertungen
- The Curious Case of Container Orchestration and Scheduling in GPU-based DatacentersDokument1 SeiteThe Curious Case of Container Orchestration and Scheduling in GPU-based DatacentersIshak HariNoch keine Bewertungen
- 1 of 1 PDFDokument7 Seiten1 of 1 PDFpatasutoshNoch keine Bewertungen
- Efficient ROS-Compliant CPU-iGPUDokument19 SeitenEfficient ROS-Compliant CPU-iGPUGary Ryan DonovanNoch keine Bewertungen
- Parallel Data Mining Techniques On GraphDokument26 SeitenParallel Data Mining Techniques On GraphbadboydhbkNoch keine Bewertungen
- Explorer ExeDokument1 SeiteExplorer Exeweb1_webteamNoch keine Bewertungen
- The Hysterical History of The Trojan WarDokument2 SeitenThe Hysterical History of The Trojan Warweb1_webteamNoch keine Bewertungen
- Bookkeeper's Diary - My First Bookkeeping Job.: WWW - Holborntraining.co - UkDokument11 SeitenBookkeeper's Diary - My First Bookkeeping Job.: WWW - Holborntraining.co - Ukweb1_webteamNoch keine Bewertungen
- Microsoft Word Tutorial: Bridal Pageant Boutique FlyerDokument15 SeitenMicrosoft Word Tutorial: Bridal Pageant Boutique FlyerRenee LiverpoolNoch keine Bewertungen
- History I.D'sDokument2 SeitenHistory I.D'sweb1_webteamNoch keine Bewertungen
- Llomagastidaharvidyayoga LL: Ie DwijdikshabrahmanvedDokument136 SeitenLlomagastidaharvidyayoga LL: Ie Dwijdikshabrahmanvedweb1_webteamNoch keine Bewertungen
- 95ci Upright Exercise Bike: Operation ManualDokument41 Seiten95ci Upright Exercise Bike: Operation Manualweb1_webteamNoch keine Bewertungen
- Difference Between NGN and Legacy TDM NetworkDokument18 SeitenDifference Between NGN and Legacy TDM Networkweb1_webteam50% (2)
- Multilevel Parking Management & Guidance Systems PARKING MANAGEMENT SYSTEMSDokument38 SeitenMultilevel Parking Management & Guidance Systems PARKING MANAGEMENT SYSTEMSweb1_webteam100% (3)
- Soap Note FormatDokument3 SeitenSoap Note Formatweb1_webteamNoch keine Bewertungen
- On-Line Technical Training Course Roadrunner Mobility Corporate Office 717Dokument76 SeitenOn-Line Technical Training Course Roadrunner Mobility Corporate Office 717web1_webteamNoch keine Bewertungen
- MultimeterDokument18 SeitenMultimeterweb1_webteam100% (2)
- How To Use A Digital Multi MeterDokument18 SeitenHow To Use A Digital Multi MeterJaveed AhamedNoch keine Bewertungen
- Basic NetworkingDokument58 SeitenBasic Networkingjsebastian69100% (3)
- Avoir Un Portable-Une Mode Ou Une Necesite?Dokument60 SeitenAvoir Un Portable-Une Mode Ou Une Necesite?web1_webteamNoch keine Bewertungen
- HTMSDokument8 SeitenHTMSweb1_webteamNoch keine Bewertungen
- Emergency Roadside Telephone System Voip CommunicationDokument4 SeitenEmergency Roadside Telephone System Voip Communicationweb1_webteamNoch keine Bewertungen
- Hotels Business Centers Airports Hospital: Arking Anagement YstemsDokument8 SeitenHotels Business Centers Airports Hospital: Arking Anagement Ystemsweb1_webteamNoch keine Bewertungen
- Premierpressbooks DownloadsDokument28 SeitenPremierpressbooks Downloadsweb1_webteamNoch keine Bewertungen
- General Construction Notes: FC Engineering ServicesDokument1 SeiteGeneral Construction Notes: FC Engineering ServicesMac KYNoch keine Bewertungen
- Water System PQDokument46 SeitenWater System PQasit_mNoch keine Bewertungen
- DMIC ProjectDokument33 SeitenDMIC ProjectParminder RaiNoch keine Bewertungen
- CTLG MINI08engDokument48 SeitenCTLG MINI08enggadacz111Noch keine Bewertungen
- Chapter 2 Magnetic Effects of Current XDokument25 SeitenChapter 2 Magnetic Effects of Current XPawan Kumar GoyalNoch keine Bewertungen
- A Simplified Two-Stage Method To Estimate The Settlement and Bending Moment of Upper Tunnel Considering The Interaction of Undercrossing Twin TunnelsDokument32 SeitenA Simplified Two-Stage Method To Estimate The Settlement and Bending Moment of Upper Tunnel Considering The Interaction of Undercrossing Twin TunnelsJianfeng XueNoch keine Bewertungen
- Pt. Partono Fondas: Company ProfileDokument34 SeitenPt. Partono Fondas: Company Profileiqbal urbandNoch keine Bewertungen
- Detailed Lesson Plan in Science 5Dokument5 SeitenDetailed Lesson Plan in Science 5hs4fptm82gNoch keine Bewertungen
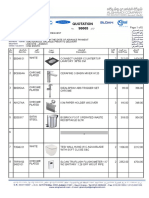
- Quotation 98665Dokument5 SeitenQuotation 98665Reda IsmailNoch keine Bewertungen
- MMD 74 XX DR PS 0020 - C03Dokument1 SeiteMMD 74 XX DR PS 0020 - C03bramexNoch keine Bewertungen
- Mitsubishi Electric Product OverviewDokument116 SeitenMitsubishi Electric Product OverviewPepes HiuuNoch keine Bewertungen
- CT2000 Manual EN 20151202 PDFDokument634 SeitenCT2000 Manual EN 20151202 PDFKhang NguyenNoch keine Bewertungen
- While We Sleep - A Story of Government Without Law by Alan R. AdaschikDokument165 SeitenWhile We Sleep - A Story of Government Without Law by Alan R. Adaschikwbradleyjr18739100% (2)
- Status Profile Creation and Assignment To An Order Type in SAP PPDokument7 SeitenStatus Profile Creation and Assignment To An Order Type in SAP PPHemant UNICHEMLLPNoch keine Bewertungen
- Student Manual of Damped & Un DampedDokument3 SeitenStudent Manual of Damped & Un DampedaqibNoch keine Bewertungen
- ANSYS Mechanical Basic Structural NonlinearitiesDokument41 SeitenANSYS Mechanical Basic Structural NonlinearitiesalexNoch keine Bewertungen
- Reading Material CH 14 Other Artificial Lift MethodsDokument18 SeitenReading Material CH 14 Other Artificial Lift MethodsSagar DadhichNoch keine Bewertungen
- McLaren Artura Order BKZQG37 Summary 2023-12-10Dokument6 SeitenMcLaren Artura Order BKZQG37 Summary 2023-12-10Salvador BaulenasNoch keine Bewertungen
- Analysis of Metal Matrix Composite (MMC) Applied Armor System Analysis of Metal Matrix Composite (MMC) Applied Armor SystemDokument8 SeitenAnalysis of Metal Matrix Composite (MMC) Applied Armor System Analysis of Metal Matrix Composite (MMC) Applied Armor SystemDerianSyahNoch keine Bewertungen
- Electrical Panel Data MSC PG: NO Panel Desc Panel CodeDokument6 SeitenElectrical Panel Data MSC PG: NO Panel Desc Panel CodeAjeng AyuNoch keine Bewertungen
- PeopleSoft Doc UpdateDokument20 SeitenPeopleSoft Doc UpdateupenderNoch keine Bewertungen
- RCJ&Y - Jubail Industrial City 2: Phase 3 and 4 Sea Water Cooling StationDokument5 SeitenRCJ&Y - Jubail Industrial City 2: Phase 3 and 4 Sea Water Cooling Stationsalman KhanNoch keine Bewertungen
- Anna University:: Chennai - 600025. Office of The Controller of Examinations Provisional Results of Nov. / Dec. Examination, 2020. Page 1/4Dokument4 SeitenAnna University:: Chennai - 600025. Office of The Controller of Examinations Provisional Results of Nov. / Dec. Examination, 2020. Page 1/4Muthu KumarNoch keine Bewertungen
- Misc Forrester SAP Competence CenterDokument16 SeitenMisc Forrester SAP Competence CenterManuel ParradoNoch keine Bewertungen
- ARRI SkyPanel - DMX Protocol Specification V4.4Dokument88 SeitenARRI SkyPanel - DMX Protocol Specification V4.4Quan LyNoch keine Bewertungen
- Data Structure Algorithm Using C PresentationDokument245 SeitenData Structure Algorithm Using C PresentationdhruvwNoch keine Bewertungen
- Testing Report For Pressure Relief Valves: Petrofac International (UAE) LLCDokument1 SeiteTesting Report For Pressure Relief Valves: Petrofac International (UAE) LLCmurthy challapalliNoch keine Bewertungen