Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Sustainability 12 06687 v2Dokument23 SeitenSustainability 12 06687 v2Filmon TNoch keine Bewertungen
- Application Note - Solaredge Inverter Support of Voltage SourcesDokument6 SeitenApplication Note - Solaredge Inverter Support of Voltage Sourcesanhthong3kNoch keine Bewertungen
- Amali 3Dokument4 SeitenAmali 3CIK JOYAHNoch keine Bewertungen
- Verasys™ Bacnet® MS/TP Communications: Technical BulletinDokument24 SeitenVerasys™ Bacnet® MS/TP Communications: Technical BulletinMegaHyperMaxNoch keine Bewertungen
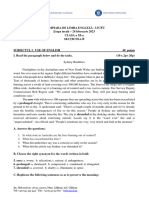
- Locala 11B SubiectDokument5 SeitenLocala 11B SubiectAndrei SainciucNoch keine Bewertungen
- Trimble TRM59900 Ti-Choke Ring GNSS Antenna Test ReportDokument7 SeitenTrimble TRM59900 Ti-Choke Ring GNSS Antenna Test ReportAkiraTsaiNoch keine Bewertungen
- Shielding RF Components at The Package LeveDokument12 SeitenShielding RF Components at The Package LeveSebastian ReguanNoch keine Bewertungen
- Plenty of Room - Nnano.2009.356Dokument1 SeitePlenty of Room - Nnano.2009.356Mario PgNoch keine Bewertungen
- Dark Side of InternetDokument285 SeitenDark Side of InternetNedelcuDaniel100% (1)
- Gas Leakage Monitoring and Alerting SystemDokument12 SeitenGas Leakage Monitoring and Alerting SystemMEEHANoch keine Bewertungen
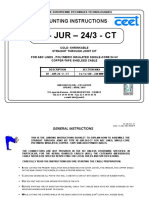
- RF-JUR - 24/3 - CT: Mounting InstructionsDokument13 SeitenRF-JUR - 24/3 - CT: Mounting InstructionsLim BoraNoch keine Bewertungen
- FHL104C User's ManualDokument49 SeitenFHL104C User's ManualChu Minh ThắngNoch keine Bewertungen
- OSI ModelDokument18 SeitenOSI ModelruletriplexNoch keine Bewertungen
- CT Canon Aquilion Lightning enDokument36 SeitenCT Canon Aquilion Lightning enTAIWO ISHOLANoch keine Bewertungen
- The Logistics and Supply Chain Innovation Handbook... - (Contents)Dokument5 SeitenThe Logistics and Supply Chain Innovation Handbook... - (Contents)Michelle LieNoch keine Bewertungen
- Customer Webinar Company Administrators FiS - September 09 2021Dokument35 SeitenCustomer Webinar Company Administrators FiS - September 09 2021kudret aytasNoch keine Bewertungen
- FC F325iT Manufacturing-System Oct2022.aspxDokument1 SeiteFC F325iT Manufacturing-System Oct2022.aspxKantishNoch keine Bewertungen
- SapDokument8 SeitenSapviveksinghchdNoch keine Bewertungen
- Trident's Expertise V1.5Dokument17 SeitenTrident's Expertise V1.5tridentNoch keine Bewertungen
- Assessment 2 (Written Assessment - Project)Dokument4 SeitenAssessment 2 (Written Assessment - Project)Robby WilsonNoch keine Bewertungen
- Advanced Lidar Data Processing With LastoolsDokument6 SeitenAdvanced Lidar Data Processing With Lastoolsaa_purwantaraNoch keine Bewertungen
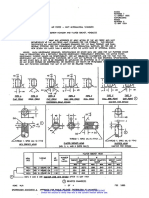
- An565 Rev. 7Dokument4 SeitenAn565 Rev. 7David WongNoch keine Bewertungen
- INSTRUCTIONS FOR USOL PRIVATE REAPPEAR DE January 2022Dokument4 SeitenINSTRUCTIONS FOR USOL PRIVATE REAPPEAR DE January 2022RaghavNoch keine Bewertungen
- Cambridge IGCSE: Computer Science 0478/21Dokument16 SeitenCambridge IGCSE: Computer Science 0478/21Ahmed ZeeshanNoch keine Bewertungen
- Thierry Bardini - BootstrappingDokument324 SeitenThierry Bardini - Bootstrappingh0ry0% (1)
- ACO 3901manual EditionEDokument104 SeitenACO 3901manual EditionEs1234tNoch keine Bewertungen
- The Scrum Guide 2017 FRDokument21 SeitenThe Scrum Guide 2017 FRAlexandre BertolinoNoch keine Bewertungen
- Location Update ScenarioDokument3 SeitenLocation Update ScenariomasanjayaNoch keine Bewertungen
- C Programming - Lecture NotesDokument26 SeitenC Programming - Lecture NotesbhdbkhqNoch keine Bewertungen
- ECS-ExtremeWireless Cloud - Lab Guide Notes Format v21.04Dokument185 SeitenECS-ExtremeWireless Cloud - Lab Guide Notes Format v21.04DavidNoch keine Bewertungen