Das könnte Ihnen auch gefallen
- Dimensionamento Suspensão A para BajaDokument64 SeitenDimensionamento Suspensão A para BajaGabriel Di Palma100% (1)
- Estradas - 2 ParteDokument16 SeitenEstradas - 2 Parteweezylaras100% (1)
- Blocos Sobre Estacas de TransiçãoDokument13 SeitenBlocos Sobre Estacas de TransiçãoAdriano RodriguesNoch keine Bewertungen
- Axor 3131 6x4 BasculanteDokument3 SeitenAxor 3131 6x4 BasculanteMaxBertiNoch keine Bewertungen
- Aula 14 Aula Pratica 02 ESTA008 17 v1Dokument8 SeitenAula 14 Aula Pratica 02 ESTA008 17 v1caNoch keine Bewertungen
- Atego 2730 EspecificaçõesDokument2 SeitenAtego 2730 EspecificaçõesWalassanCésarNoch keine Bewertungen
- Estudo de Dinâmica VerticalDokument39 SeitenEstudo de Dinâmica VerticalMurilo PerãoNoch keine Bewertungen
- ANSYS - WorkbenchDokument49 SeitenANSYS - WorkbenchRodrigo WendhausenNoch keine Bewertungen
- TUTORIAL TECNICO DA IMPLEMENTACAO NUMERICA DO METODO BLADE ELEMENT MOMENTUM MARCY BORGES 2021 Relatorio - Aerodinamica - HelicopterosDokument12 SeitenTUTORIAL TECNICO DA IMPLEMENTACAO NUMERICA DO METODO BLADE ELEMENT MOMENTUM MARCY BORGES 2021 Relatorio - Aerodinamica - HelicopterosMariela TisseraNoch keine Bewertungen
- Actros 8x4 Processos de Manutenção 1 PDFDokument43 SeitenActros 8x4 Processos de Manutenção 1 PDFAlexsandro Alexandre BezerraNoch keine Bewertungen
- Projeto de AutomoveisDokument39 SeitenProjeto de AutomoveisMatheus TarantinNoch keine Bewertungen
- Análise Da Dinâmica de Voo de Uma Aeronave Desenvolvidapara A Competição SAE Aerodesign - Revisão 1Dokument8 SeitenAnálise Da Dinâmica de Voo de Uma Aeronave Desenvolvidapara A Competição SAE Aerodesign - Revisão 1Thiago Lins CostaNoch keine Bewertungen
- Axor 4144 6x4 Basculante Fora de Estrada B09916617Dokument2 SeitenAxor 4144 6x4 Basculante Fora de Estrada B09916617calimannikolasNoch keine Bewertungen
- Memorial de Projeto CUBODokument11 SeitenMemorial de Projeto CUBOVictor ValverdeNoch keine Bewertungen
- Art - TCC - 055 - 2006 - ESTUDO DA INTERAÇÃO PNEU-SOLO PARA VEÍCULOS FORA-DEESTRADADokument9 SeitenArt - TCC - 055 - 2006 - ESTUDO DA INTERAÇÃO PNEU-SOLO PARA VEÍCULOS FORA-DEESTRADAMarcus CasagrandeNoch keine Bewertungen
- Modelagem Dinâmica de Uma Moto-VfDokument25 SeitenModelagem Dinâmica de Uma Moto-VfJoaquim PinheiroNoch keine Bewertungen
- Axor 3344 6x4 Basculante Fora de Estrada B09916615Dokument2 SeitenAxor 3344 6x4 Basculante Fora de Estrada B09916615JosimarNoch keine Bewertungen
- Lista 3 - Redutores e Rodas de AtritoDokument3 SeitenLista 3 - Redutores e Rodas de AtritoLeewangNoch keine Bewertungen
- (Apostila - UTF-PR) Curso de Especialização em Engenharia Automotiva - Módulo Transmissões IDokument0 Seiten(Apostila - UTF-PR) Curso de Especialização em Engenharia Automotiva - Módulo Transmissões IiyomasaNoch keine Bewertungen
- Projeto de Engrenagens Retas 2Dokument11 SeitenProjeto de Engrenagens Retas 2Fabio BarrosNoch keine Bewertungen
- Manual Axor 3131Dokument2 SeitenManual Axor 3131RicardoNoch keine Bewertungen
- Aula 1 Me911 Sistema de Embreagem Transmissýo de TorqueDokument27 SeitenAula 1 Me911 Sistema de Embreagem Transmissýo de TorquemartecmecNoch keine Bewertungen
- Parafuso de PotenciaDokument22 SeitenParafuso de PotenciafeernandobNoch keine Bewertungen
- EM866Dokument16 SeitenEM866Guilherme Buzinari ArrudaNoch keine Bewertungen
- Denhando Uma em Helicoidal Tri DimensionalDokument10 SeitenDenhando Uma em Helicoidal Tri DimensionalIgor TrevisanNoch keine Bewertungen
- Projeto de MaquinasDokument172 SeitenProjeto de MaquinasFelipe Alcalde de SáNoch keine Bewertungen
- Axor 4144 6x4 Basculante - V1 - 19 - SiteDokument2 SeitenAxor 4144 6x4 Basculante - V1 - 19 - SiteGuilherme CastroNoch keine Bewertungen
- PARAHYBAJA, 2013 Resumo Relatório - XIX Competição Baja SAEDokument4 SeitenPARAHYBAJA, 2013 Resumo Relatório - XIX Competição Baja SAEEdjan TomazNoch keine Bewertungen
- Artigo Gabriel BachegaDokument18 SeitenArtigo Gabriel BachegaAndré LuizNoch keine Bewertungen
- 7 Actros 2653 S 6 4 BlueTec 6Dokument2 Seiten7 Actros 2653 S 6 4 BlueTec 6Ana MartinsNoch keine Bewertungen
- Relatório - Exp1 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Dokument20 SeitenRelatório - Exp1 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Fernando Henrique G. ZucatelliNoch keine Bewertungen
- Bancada de Testes Didática para Análise Dinâmica de Um Sistema de Transmissão Veicular Tipo CVTDokument12 SeitenBancada de Testes Didática para Análise Dinâmica de Um Sistema de Transmissão Veicular Tipo CVTFilipe CunhaNoch keine Bewertungen
- SuperlarguraDokument9 SeitenSuperlarguraGustavoNoch keine Bewertungen
- Admin, 11 PDFDokument12 SeitenAdmin, 11 PDFHenrique SidNoch keine Bewertungen
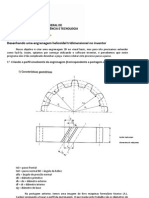
- Cames 1Dokument10 SeitenCames 1euNoch keine Bewertungen
- Atego 2730-36 6x4 Basculante 2017 FEVEREIRODokument2 SeitenAtego 2730-36 6x4 Basculante 2017 FEVEREIRORodrigo PenaNoch keine Bewertungen
- Ball and Beam (Simulink)Dokument8 SeitenBall and Beam (Simulink)marcelviegasNoch keine Bewertungen
- Aula 02 P 2Dokument8 SeitenAula 02 P 2Adriano Lemos PessanhaNoch keine Bewertungen
- Calculo Preliminar de Cargas e EstruturasDokument40 SeitenCalculo Preliminar de Cargas e EstruturasFahed KarinoNoch keine Bewertungen
- Teoria Sobre Parafuso de PotênciaDokument8 SeitenTeoria Sobre Parafuso de PotênciaLeonardo SantosNoch keine Bewertungen
- Abacar AmissedocxDokument83 SeitenAbacar AmissedocxRAFAEL JOSE MOLIDE JUNIORNoch keine Bewertungen
- Desenvolvimento e Dimensionamento Do Projeto Do Subsistema de Direção de Veículo Fora-De-Estrada PDFDokument11 SeitenDesenvolvimento e Dimensionamento Do Projeto Do Subsistema de Direção de Veículo Fora-De-Estrada PDFmikael bezerra cotias dos santosNoch keine Bewertungen
- Trabalho ChanceDokument2 SeitenTrabalho ChanceEudes RafaelNoch keine Bewertungen
- FichaTecnica Atego 27306x4 BetoneiraV4Dokument2 SeitenFichaTecnica Atego 27306x4 BetoneiraV4João PauloNoch keine Bewertungen
- Avaliacao Turbina - Luis Claudio CoutoDokument7 SeitenAvaliacao Turbina - Luis Claudio CoutoLuis Claudio Couto0% (1)
- Conversor cc-cc para aplicações veiculares: conversor cc-cc com características de tensão e corrente compatíveis com aplicações e veículos elétricosVon EverandConversor cc-cc para aplicações veiculares: conversor cc-cc com características de tensão e corrente compatíveis com aplicações e veículos elétricosNoch keine Bewertungen
- Projetos Em Clp Ladder Baseado No Twidosuite Parte IvVon EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte IvNoch keine Bewertungen
- Sistemas Digitais IIDokument57 SeitenSistemas Digitais IItecpowerNoch keine Bewertungen
- 3 - Amplificadores Operacionais v2.0Dokument44 Seiten3 - Amplificadores Operacionais v2.0carlos augusto do carmo braiaNoch keine Bewertungen
- 11 Dicas Práticas de Como Utilizar o Computador e Celular Sem Cansar Seus OlhosDokument14 Seiten11 Dicas Práticas de Como Utilizar o Computador e Celular Sem Cansar Seus OlhosTania FrisonNoch keine Bewertungen
- Elp 3 T14Dokument60 SeitenElp 3 T14Jonatas Gabassi RonconiNoch keine Bewertungen
- Descritivo Copel Telecom - APIMEC RJDokument27 SeitenDescritivo Copel Telecom - APIMEC RJJonatas Gabassi RonconiNoch keine Bewertungen
- HTML Webdesign IbpiDokument129 SeitenHTML Webdesign IbpiGilvan MartinsNoch keine Bewertungen
- Indu-006Dokument5 SeitenIndu-006roger1512Noch keine Bewertungen
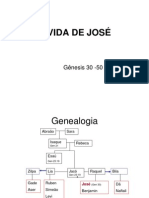
- Jose Do Egito VidaDokument20 SeitenJose Do Egito VidaJonatas Gabassi Ronconi50% (2)
- Catalogo Rainha Das Sete PDFDokument212 SeitenCatalogo Rainha Das Sete PDFRenan AlmeidaNoch keine Bewertungen
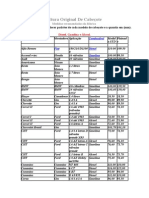
- Delphi Catálogo Injeção Eletrônica e Ignição 2012/2013Dokument267 SeitenDelphi Catálogo Injeção Eletrônica e Ignição 2012/2013LEODECIO BELO DE OLIVEIRA71% (7)
- Carrinhos MadeiraDokument175 SeitenCarrinhos MadeiraPROGEEKS - INNOVATION100% (2)
- Glossary of The WorldDokument48 SeitenGlossary of The Worldjbernard4Noch keine Bewertungen
- # Parte Diária Equipamento e Veiculos - Modelo NovoDokument2 Seiten# Parte Diária Equipamento e Veiculos - Modelo NovoAndre Alves86% (21)
- Altura de Cabeçotes PDFDokument3 SeitenAltura de Cabeçotes PDFJoseane Vitória33% (3)
- Boletim Ponto Motor X10Dokument5 SeitenBoletim Ponto Motor X10Juninho100% (3)
- Ciclo de Revisão G 450 B6x4. ConvencionalDokument2 SeitenCiclo de Revisão G 450 B6x4. ConvencionalFred LoretoNoch keine Bewertungen
- Catalogo Agregados 2023Dokument25 SeitenCatalogo Agregados 2023Edson Pires FernandesNoch keine Bewertungen
- Ventoinhas Importadas Da China BoasDokument4 SeitenVentoinhas Importadas Da China BoasvrtulerNoch keine Bewertungen
- 0 Polias e TensoresDokument16 Seiten0 Polias e TensoresPedro MoraesNoch keine Bewertungen
- Catalogo ReposiçãoDokument128 SeitenCatalogo ReposiçãoAnonymous CqPkPAYgkZNoch keine Bewertungen
- Manual de Esquema Elétrico SCANIADokument168 SeitenManual de Esquema Elétrico SCANIAroney.w.lNoch keine Bewertungen
- Folder FZBR 920 NovoDokument6 SeitenFolder FZBR 920 NovoArthur Henrique KummNoch keine Bewertungen
- POP 01 - Veículos Rodoviários - Rev.01 (20.07.2020)Dokument4 SeitenPOP 01 - Veículos Rodoviários - Rev.01 (20.07.2020)Gustavo RibeiroNoch keine Bewertungen
- Sportage 2016 - 2017 - Manual Do ProprietárioDokument628 SeitenSportage 2016 - 2017 - Manual Do ProprietárioIvanSouzaNoch keine Bewertungen
- Transmissao PDFDokument57 SeitenTransmissao PDFSidney M. Silva100% (1)
- Simulado - Raynon Direção - 02Dokument2 SeitenSimulado - Raynon Direção - 02guilhermeNoch keine Bewertungen
- LCG Catálogo 4º EdiçãoDokument8 SeitenLCG Catálogo 4º EdiçãoPaulo Sergio UtinettiNoch keine Bewertungen
- Folder Ina Rolamentos AutomotivosDokument144 SeitenFolder Ina Rolamentos AutomotivosBruno DantasNoch keine Bewertungen
- Catálogo de Peças TRATOR MONTANA 45 - 50 - 60cvDokument200 SeitenCatálogo de Peças TRATOR MONTANA 45 - 50 - 60cvPábulo RuannNoch keine Bewertungen
- Manutenção Periódica mz52 e mz48.Dokument3 SeitenManutenção Periódica mz52 e mz48.Lucas FerreiraNoch keine Bewertungen
- Cisterna Combustivel GMC 6x6Dokument1 SeiteCisterna Combustivel GMC 6x6Elias GeorgesNoch keine Bewertungen
- Programa MULTIDokument60 SeitenPrograma MULTIEduardo Almeida100% (1)
- Catálogo TBR - FirestoneDokument12 SeitenCatálogo TBR - FirestoneDaniel RamosNoch keine Bewertungen
- JD 5075E 5078E 5085E 5090E Guia de Consulta Rápida PDFDokument4 SeitenJD 5075E 5078E 5085E 5090E Guia de Consulta Rápida PDFAlencar Pedroso Filho100% (1)
- Diagrma para Alarme POP100Dokument5 SeitenDiagrma para Alarme POP100Agnaldo Bartho100% (1)
- IPVA - 2022 - 1 A 10 AnosDokument170 SeitenIPVA - 2022 - 1 A 10 AnosRoberto CarlosNoch keine Bewertungen
- Catalogo - FinderDokument24 SeitenCatalogo - Findervalter pereiraNoch keine Bewertungen
- Códigos de Defeito: Montadora Sistema Nome Nissan ABS Nissan ABS-7Dokument2 SeitenCódigos de Defeito: Montadora Sistema Nome Nissan ABS Nissan ABS-7gustavo silvaNoch keine Bewertungen