Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- 6th Central Pay Commission Salary CalculatorDokument15 Seiten6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Virtual Work 3rd Year Structural EngineeringDokument129 SeitenVirtual Work 3rd Year Structural EngineeringStefano Martin PorciunculaNoch keine Bewertungen
- Lightweight UavDokument149 SeitenLightweight Uavvb corpNoch keine Bewertungen
- CHEC001231-Bridge Bearing and Expansion JointsDokument78 SeitenCHEC001231-Bridge Bearing and Expansion JointsRaymond Payne100% (1)
- PCAB List of Licensed Contractors For CFY 2017-2018 As of 19 Sep 2017 - Web2Dokument175 SeitenPCAB List of Licensed Contractors For CFY 2017-2018 As of 19 Sep 2017 - Web2Paige Lim76% (21)
- AN3116 ADC Modes and ApplicationsDokument18 SeitenAN3116 ADC Modes and ApplicationsHarinadha ReddyNoch keine Bewertungen
- GaussNewton QuaternionComplemFilter V13Dokument8 SeitenGaussNewton QuaternionComplemFilter V13Harinadha ReddyNoch keine Bewertungen
- Bachmann Qua Tern Ion PaperDokument8 SeitenBachmann Qua Tern Ion PaperHarinadha ReddyNoch keine Bewertungen
- Digital RF Driver for Laser Intensity ControlDokument2 SeitenDigital RF Driver for Laser Intensity ControlGaloppierende ZuversichtNoch keine Bewertungen
- Vibration assignment on 3DOF cantilever beam systemDokument5 SeitenVibration assignment on 3DOF cantilever beam systemIzzah 'AtirahNoch keine Bewertungen
- 5th Grade 13-14 Math Common Core Standards by QuarterDokument3 Seiten5th Grade 13-14 Math Common Core Standards by QuartermrkballNoch keine Bewertungen
- NCHRP RPT 242 PDFDokument85 SeitenNCHRP RPT 242 PDFDavid Drolet TremblayNoch keine Bewertungen
- Geometric TolerancesDokument6 SeitenGeometric Tolerancesvaibhavgitevaibhav_9Noch keine Bewertungen
- M.Prasad Naidu MSC Medical Biochemistry, PH.D Research ScholarDokument31 SeitenM.Prasad Naidu MSC Medical Biochemistry, PH.D Research ScholarDr. M. Prasad NaiduNoch keine Bewertungen
- PRC New ShowDokument31 SeitenPRC New ShowxyxyquazNoch keine Bewertungen
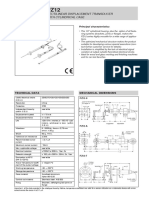
- Rectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical DimensionsDokument2 SeitenRectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical Dimensionsl561926Noch keine Bewertungen
- Temperature Regulator With Two Temperature SensorsDokument2 SeitenTemperature Regulator With Two Temperature SensorsSandi AslanNoch keine Bewertungen
- Comparison of Design of Steel Roof Truss Using IS 875 and SP 38Dokument3 SeitenComparison of Design of Steel Roof Truss Using IS 875 and SP 38anbugobiNoch keine Bewertungen
- Energy Balance Untuk Teknik KimiaDokument19 SeitenEnergy Balance Untuk Teknik Kimiamelisa amaliaNoch keine Bewertungen
- CGN 3421 - Numerical Methods Lecture 3Dokument15 SeitenCGN 3421 - Numerical Methods Lecture 3sori1386Noch keine Bewertungen
- Lab Instruments GuideDokument19 SeitenLab Instruments GuideDesQuina DescoNoch keine Bewertungen
- Cara SamplingDokument8 SeitenCara SamplingAngga Dwi PutrantoNoch keine Bewertungen
- Isaacs. Differential GamesDokument13 SeitenIsaacs. Differential GamescrovaxIIINoch keine Bewertungen
- A2 Chapter 14 OscillationDokument61 SeitenA2 Chapter 14 OscillationkwaikunNoch keine Bewertungen
- Assignment MetrologyDokument8 SeitenAssignment MetrologyPratama sudibyo0% (1)
- Magic Equation r1 (All Codes)Dokument16 SeitenMagic Equation r1 (All Codes)Prashant SunagarNoch keine Bewertungen
- ROCKYDokument4 SeitenROCKYNelson Alexander Aponte SimbronNoch keine Bewertungen
- Revision Notes Grade 11Dokument3 SeitenRevision Notes Grade 11anuelisajoseNoch keine Bewertungen
- Catalog Whatman 2018.compressedDokument214 SeitenCatalog Whatman 2018.compressedRakha Milan BachtiarNoch keine Bewertungen
- 12 Class Physics 1-Chapter Sample Paper PDFDokument9 Seiten12 Class Physics 1-Chapter Sample Paper PDFharshNoch keine Bewertungen
- Cluster Level Question Bank (Ahmedabad & Gandhinagar Cluster)Dokument33 SeitenCluster Level Question Bank (Ahmedabad & Gandhinagar Cluster)manpreetsingh3458417Noch keine Bewertungen
- Nature Article PDFDokument8 SeitenNature Article PDFMehr Asif MahmoodNoch keine Bewertungen
- Numericals - RajasthanUniversity - Papers End Sem ChemDokument20 SeitenNumericals - RajasthanUniversity - Papers End Sem ChemJanmendraNoch keine Bewertungen