Das könnte Ihnen auch gefallen
- Exercices Corriges Developpement LimiteDokument8 SeitenExercices Corriges Developpement LimiteMichaëlNoch keine Bewertungen
- Corrigé TP4 MatlabDokument13 SeitenCorrigé TP4 MatlabAnonymous cUVZDi100% (1)
- Théorème de Thalès Dans Le Triangle (4ème)Dokument3 SeitenThéorème de Thalès Dans Le Triangle (4ème)MATHS - VIDEOSNoch keine Bewertungen
- Une Querelle Des Anciens Et Des ModernesDokument12 SeitenUne Querelle Des Anciens Et Des ModernesJJacquelinNoch keine Bewertungen
- Bernard Gostiaux - Exercices de Mathématiques Spéciales, Tome 3 - Géométrie, Géométrie Différentielle. 3-Presses Universitaires de France - PUF (1997) PDFDokument338 SeitenBernard Gostiaux - Exercices de Mathématiques Spéciales, Tome 3 - Géométrie, Géométrie Différentielle. 3-Presses Universitaires de France - PUF (1997) PDFNi HadNoch keine Bewertungen
- Al7ma02tdpa0112 Sequence 01Dokument60 SeitenAl7ma02tdpa0112 Sequence 01eli0t3zNoch keine Bewertungen
- CR 1 Analyse Numérique Mercier Lelong Gc1Dokument11 SeitenCR 1 Analyse Numérique Mercier Lelong Gc1Jérémy TizouteNoch keine Bewertungen
- Test D'attentes Fondamentales (TAF) : MathématiquesDokument8 SeitenTest D'attentes Fondamentales (TAF) : MathématiquesKelly RodriguesNoch keine Bewertungen
- Chapitre 1 2 FinaleDokument9 SeitenChapitre 1 2 FinaleYounes BoucherifNoch keine Bewertungen
- 1.6. Valeurs Propres Et Vecteurs Propres Chapitre 1. Systèmes LinéairesDokument38 Seiten1.6. Valeurs Propres Et Vecteurs Propres Chapitre 1. Systèmes LinéairesGerardo GeusaNoch keine Bewertungen
- Methode Monte CarloDokument6 SeitenMethode Monte CarloSFIA AGHOURINoch keine Bewertungen
- Concours Commun Polytechniques (CCINP) 2023 TPC Mathématiques eDokument8 SeitenConcours Commun Polytechniques (CCINP) 2023 TPC Mathématiques eLoubaba MHNoch keine Bewertungen
- Chapitre1 3-1Dokument33 SeitenChapitre1 3-1Oumaima BouhaniNoch keine Bewertungen
- Analyse Numerique1Dokument16 SeitenAnalyse Numerique1Grace BendaNoch keine Bewertungen
- Lemme de PompageDokument9 SeitenLemme de Pompagehayfa rajhiNoch keine Bewertungen
- cc2 CorrigeDokument21 Seitencc2 CorrigejeanNoch keine Bewertungen
- Chapitre1 3Dokument39 SeitenChapitre1 3ghassenNoch keine Bewertungen
- rms119 1Dokument83 Seitenrms119 1Martin KoebelNoch keine Bewertungen
- Complexité AlgorithmiqueDokument4 SeitenComplexité AlgorithmiqueEiremNoch keine Bewertungen
- Chap I - Complexité AlgorithmiqueDokument6 SeitenChap I - Complexité AlgorithmiqueSaid OulhoussineNoch keine Bewertungen
- Compte Rendu TP1 Problème de La Plaque 2DDokument41 SeitenCompte Rendu TP1 Problème de La Plaque 2DArt ScenoNoch keine Bewertungen
- Méthodes Numériques - 111143Dokument20 SeitenMéthodes Numériques - 111143kamirbenayadNoch keine Bewertungen
- Calculs en Précision Arbitraire: Travaux PratiquesDokument3 SeitenCalculs en Précision Arbitraire: Travaux PratiquesYasser El hattabiNoch keine Bewertungen
- Composition - TS2 - IA FatickDokument2 SeitenComposition - TS2 - IA FatickAit Cheikh AbdellahNoch keine Bewertungen
- Cours 1 Li 5Dokument43 SeitenCours 1 Li 5Karam Nirmine El HatimiNoch keine Bewertungen
- Chapitre1 (Suites) TrousDokument11 SeitenChapitre1 (Suites) Trousمحمد امينNoch keine Bewertungen
- Mathématiques Avec Python Et Ruby - Suites en Python - WikilivresDokument7 SeitenMathématiques Avec Python Et Ruby - Suites en Python - WikilivresNy tsiry NomenjanaharyNoch keine Bewertungen
- Lamthode Monte CarloetsesapplicationsDokument10 SeitenLamthode Monte CarloetsesapplicationszakariaNoch keine Bewertungen
- Mat227-2018 CCDokument2 SeitenMat227-2018 CCJean Jacques Atemengue ZameNoch keine Bewertungen
- Capes 2011 M2 EnonceDokument5 SeitenCapes 2011 M2 EnonceNabil HananiNoch keine Bewertungen
- Bac Mars 2015 Nouvelle CaledonieDokument3 SeitenBac Mars 2015 Nouvelle CaledonieDony KravitzNoch keine Bewertungen
- TD1 Algo 2022 2023Dokument3 SeitenTD1 Algo 2022 2023Boutayna J03Noch keine Bewertungen
- Fichecrypto 208Dokument3 SeitenFichecrypto 208Atman RahNoch keine Bewertungen
- TP ALGO 3 Groupe3Dokument7 SeitenTP ALGO 3 Groupe3Jourdain KamufuenketeNoch keine Bewertungen
- Devoir Aut 19Dokument3 SeitenDevoir Aut 19azzamNoch keine Bewertungen
- TD1 Algo 2021 2022Dokument3 SeitenTD1 Algo 2021 2022Modibo ToloNoch keine Bewertungen
- CCMP Mathematiques-II 2012 PSIDokument4 SeitenCCMP Mathematiques-II 2012 PSIlangagecccNoch keine Bewertungen
- Sujets CachanDokument48 SeitenSujets CachanetalieezechielNoch keine Bewertungen
- Correction Theorique 2020 2021Dokument12 SeitenCorrection Theorique 2020 2021sami.makni2020Noch keine Bewertungen
- Corrinfo 4Dokument8 SeitenCorrinfo 4Youness MOUZAKINoch keine Bewertungen
- Chapitre2 Systèmes AsservisDokument14 SeitenChapitre2 Systèmes AsservisEmmanuel Kawalina KatalikoNoch keine Bewertungen
- Cycles Eulériens Et HamiltoniensDokument6 SeitenCycles Eulériens Et HamiltoniensSamah Sam BouimaNoch keine Bewertungen
- 2006 Sudokus Et Algorithmes de Recuit 2Dokument5 Seiten2006 Sudokus Et Algorithmes de Recuit 2Bouchra EzzaimNoch keine Bewertungen
- Slides ALGO1 Chap 3 Analyse AlgoDokument41 SeitenSlides ALGO1 Chap 3 Analyse Algoanonymous50600Noch keine Bewertungen
- Cor CNC MathsII MP 07Dokument4 SeitenCor CNC MathsII MP 07Asmae ToufikiNoch keine Bewertungen
- Serie Entier PDFDokument7 SeitenSerie Entier PDFaityahiamassyliaNoch keine Bewertungen
- MP Math2Dokument8 SeitenMP Math2lopabaNoch keine Bewertungen
- TD1 Algo 2019 02 12Dokument2 SeitenTD1 Algo 2019 02 12brown061822Noch keine Bewertungen
- Geipi 2013 EnonceDokument3 SeitenGeipi 2013 EnonceBile DjetouanNoch keine Bewertungen
- CM CFDokument36 SeitenCM CFJane ChatwinNoch keine Bewertungen
- Les Nombres RationnelsDokument18 SeitenLes Nombres RationnelsachiepomorelaxelNoch keine Bewertungen
- Les Structures Itératives Chapitre 4Dokument28 SeitenLes Structures Itératives Chapitre 4wafa.prof.kalaaNoch keine Bewertungen
- Rapport MDFDokument34 SeitenRapport MDFillusionperpetuelle100% (1)
- Lamthode Monte CarloetsesapplicationsDokument10 SeitenLamthode Monte CarloetsesapplicationsTaoudi HananeNoch keine Bewertungen
- Mathématiques 1: 4 Heures Calculatrice AutoriséeDokument4 SeitenMathématiques 1: 4 Heures Calculatrice Autoriséeyassirtm el outmaniNoch keine Bewertungen
- BDIjan 2013Dokument11 SeitenBDIjan 2013Franck NJAMPOUNoch keine Bewertungen
- Resume de Cour Analyse 1Dokument43 SeitenResume de Cour Analyse 1MissIndia Zahrellaa0% (1)
- DM Elec2mec1 1011-EsDokument4 SeitenDM Elec2mec1 1011-EsAmìnè Cheìkh MèdNoch keine Bewertungen
- Chapitre 3Dokument13 SeitenChapitre 3Shakespeare RahmaNoch keine Bewertungen
- TP3 2018Dokument6 SeitenTP3 2018mcbenmahdiNoch keine Bewertungen
- TP AutomatiqueDokument19 SeitenTP AutomatiquemainoNoch keine Bewertungen
- Devoir 2Dokument4 SeitenDevoir 2Arti Chaud0% (3)
- Transformation linéaire directe: Applications et techniques pratiques en vision par ordinateurVon EverandTransformation linéaire directe: Applications et techniques pratiques en vision par ordinateurNoch keine Bewertungen
- Racine Carrée - Définition Et PropriétésDokument3 SeitenRacine Carrée - Définition Et Propriétésmy_Scribd_pseudoNoch keine Bewertungen
- Complexe Avec SolutionDokument5 SeitenComplexe Avec SolutionMohamed Badian Traore100% (2)
- Utilisation Et Évolution Des Procédés de SoudageDokument11 SeitenUtilisation Et Évolution Des Procédés de SoudageGOUAREF SAMIRNoch keine Bewertungen
- 612aae1b478c0multiplication Cours de Maths 6emeDokument2 Seiten612aae1b478c0multiplication Cours de Maths 6emeMohamed HaidaraNoch keine Bewertungen
- Accord Des Adjectifs Ce1 Ce2 Cm1 Cm2Dokument6 SeitenAccord Des Adjectifs Ce1 Ce2 Cm1 Cm2Yassine JazairiNoch keine Bewertungen
- $RI45FDODokument14 Seiten$RI45FDOcharlesNoch keine Bewertungen
- 2011 2012 M231 L1PCDokument198 Seiten2011 2012 M231 L1PCDamani BkNoch keine Bewertungen
- CPGE Candidature D133156752Dokument1 SeiteCPGE Candidature D133156752Meryeem BenNoch keine Bewertungen
- Série D'exercices N°1 - Math Complexe - 1ère AS (2012-2013) MR Saif Zouabi PDFDokument3 SeitenSérie D'exercices N°1 - Math Complexe - 1ère AS (2012-2013) MR Saif Zouabi PDFFatma LabarNoch keine Bewertungen
- 5 Echap 6 ActDokument10 Seiten5 Echap 6 ActOdon RAZANABESONoch keine Bewertungen
- CercleDokument3 SeitenCerclemiriNoch keine Bewertungen
- Maths 2C - L5 - Droites Et Plans Dans Lespace .Dokument15 SeitenMaths 2C - L5 - Droites Et Plans Dans Lespace .Yoman Arthur verdier AssuiNoch keine Bewertungen
- Numeration 1 Rituel Decomposition de Nombres CE2Dokument1 SeiteNumeration 1 Rituel Decomposition de Nombres CE2vialNoch keine Bewertungen
- No13 07 Fev 2022 Sujetexa - ComDokument2 SeitenNo13 07 Fev 2022 Sujetexa - ComMartine KenfackNoch keine Bewertungen
- 6 Act10Dokument10 Seiten6 Act10NahilNoch keine Bewertungen
- Exos T S SimilitudesDokument5 SeitenExos T S Similitudesluxiole100% (1)
- Coordonnées D'un VecteurDokument24 SeitenCoordonnées D'un VecteurmsleaderNoch keine Bewertungen
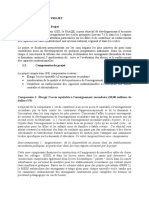
- Ges Description Du ProjetDokument8 SeitenGes Description Du ProjetNoureddine RabaiNoch keine Bewertungen
- Mots Mélés de Math: 4GDokument1 SeiteMots Mélés de Math: 4GdeheuNoch keine Bewertungen
- 10 Vers Le BrevetDokument4 Seiten10 Vers Le BrevetHenry MantaNoch keine Bewertungen
- Séries de Fourier Osmanov-Boudref-1 PDFDokument42 SeitenSéries de Fourier Osmanov-Boudref-1 PDFDramane TraoreNoch keine Bewertungen
- Maths 4ième. Cours Complet École Numérique (Côte D'ivoire) - 022558Dokument104 SeitenMaths 4ième. Cours Complet École Numérique (Côte D'ivoire) - 022558programmation6625Noch keine Bewertungen
- Crypto 02Dokument13 SeitenCrypto 02he1960Noch keine Bewertungen
- CORRIGE MATHS TLe DDokument7 SeitenCORRIGE MATHS TLe DSamuel OLOJEDENoch keine Bewertungen
- Dérivation Et Intégration Des Fonctions VectoriellesDokument13 SeitenDérivation Et Intégration Des Fonctions VectoriellesJihane HammoutNoch keine Bewertungen