Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Ferroresonance in Electromagnetic Voltage Transformers A Study Based On Nonlinear DynamicsDokument5 SeitenFerroresonance in Electromagnetic Voltage Transformers A Study Based On Nonlinear Dynamicsvarun.elangovanNoch keine Bewertungen
- Operation Manual X-Ray Tube Assembly 0.7/1.3U163C-36Dokument40 SeitenOperation Manual X-Ray Tube Assembly 0.7/1.3U163C-36Aknouch AbdelmoujibNoch keine Bewertungen
- HWXX-6516DS1-VTM - HWXX-6516DS1-A2M: General SpecificationsDokument4 SeitenHWXX-6516DS1-VTM - HWXX-6516DS1-A2M: General SpecificationsLuis Adolfo Mazini RodriguesNoch keine Bewertungen
- GATE Analytical, Optical & Biomedical Instrumentation BookDokument12 SeitenGATE Analytical, Optical & Biomedical Instrumentation BookFaniAli100% (3)
- Notes Kinetic Molecular TheoryDokument4 SeitenNotes Kinetic Molecular TheoryGino Carlos MiguelNoch keine Bewertungen
- Topic 2a - Spectroscopy and SpectrometerDokument19 SeitenTopic 2a - Spectroscopy and SpectrometerLoh JiayeeNoch keine Bewertungen
- Types of Antenna - BARON - EE179Dokument6 SeitenTypes of Antenna - BARON - EE179Rosendo J. BaronNoch keine Bewertungen
- EMC PlanDokument28 SeitenEMC Planyadvikram7Noch keine Bewertungen
- Ultrasonic Examination: AusteniticweldsDokument7 SeitenUltrasonic Examination: Austeniticweldsthanhtung156Noch keine Bewertungen
- Design and Construction of An Electric Arc Welding Machine With Digital Display.Dokument11 SeitenDesign and Construction of An Electric Arc Welding Machine With Digital Display.michael gorgeNoch keine Bewertungen
- KCB Series Thyristor Triggering TransformersDokument15 SeitenKCB Series Thyristor Triggering Transformersmar_barudjNoch keine Bewertungen
- Lect 04 - CH 08 Static Magnetic Field - Part 1 - HW3Dokument46 SeitenLect 04 - CH 08 Static Magnetic Field - Part 1 - HW3YeasminNoch keine Bewertungen
- Night Vision Technology: Click To Edit Master Subtitle StyleDokument19 SeitenNight Vision Technology: Click To Edit Master Subtitle StyleShalu KholaNoch keine Bewertungen
- Integrated Gate Commutated ThyristorDokument3 SeitenIntegrated Gate Commutated ThyristorKishore CkNoch keine Bewertungen
- Antenna Theory - Collinear Array - TutorialspointDokument2 SeitenAntenna Theory - Collinear Array - TutorialspointSukhada Deshpande.Noch keine Bewertungen
- Ho-1.1 Fault Analysis 2Dokument17 SeitenHo-1.1 Fault Analysis 2japhet ontongNoch keine Bewertungen
- Phase-IV: - PhysicsDokument15 SeitenPhase-IV: - PhysicsAnish LahiriNoch keine Bewertungen
- Types of DiodesDokument11 SeitenTypes of DiodesElisha LopezNoch keine Bewertungen
- Corona Loss in Transmission LinesDokument18 SeitenCorona Loss in Transmission LinesGaurav OrganNoch keine Bewertungen
- Chapter 4 Moving Charges and FieldDokument19 SeitenChapter 4 Moving Charges and FieldSANDRONoch keine Bewertungen
- Pen 14 QipDokument38 SeitenPen 14 QipBayu PrakosoNoch keine Bewertungen
- Advancing Physics B A2 CourseworkDokument5 SeitenAdvancing Physics B A2 Courseworkbotav1nakak3100% (2)
- SMT1 Nature of Force KeyDokument2 SeitenSMT1 Nature of Force KeyRoan Tapia AntiquenoNoch keine Bewertungen
- According To The ANSI/IEEE 946: Figure 1. 125 VDC System Key DiagramDokument8 SeitenAccording To The ANSI/IEEE 946: Figure 1. 125 VDC System Key DiagramDavid MorenoNoch keine Bewertungen
- NDT Devices SummaryDokument16 SeitenNDT Devices SummaryLearn SAPNoch keine Bewertungen
- Activity 6 - Two Station Motor Control With Emergency Stop (Non-Reversing)Dokument15 SeitenActivity 6 - Two Station Motor Control With Emergency Stop (Non-Reversing)AJ LunaNoch keine Bewertungen
- COMEDK UGET 2024 Preparation TipsDokument10 SeitenCOMEDK UGET 2024 Preparation TipsSarthakNoch keine Bewertungen
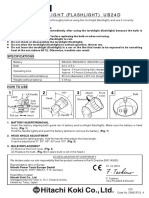
- Torchlight (Flashlight) Ub24D: SpecificationsDokument1 SeiteTorchlight (Flashlight) Ub24D: SpecificationsPandu BirumakovelaNoch keine Bewertungen
- CSEC Physics Paper 1 June 2017-1Dokument14 SeitenCSEC Physics Paper 1 June 2017-1Jonathan Thomas100% (3)
- 11th Topicals RAWDokument505 Seiten11th Topicals RAWmkhantareen78Noch keine Bewertungen