Das könnte Ihnen auch gefallen
- Air-Cored Axial FluxDokument5 SeitenAir-Cored Axial FluxOWAIS HAMEEDNoch keine Bewertungen
- Optimal Scheme For Structural Design of Large Turbogenerator Stator End WindingDokument10 SeitenOptimal Scheme For Structural Design of Large Turbogenerator Stator End WindingmanojkumarNoch keine Bewertungen
- An Experimentally Verified Hybrid Cassie-Mayr Electric Arc Model For Power Electronics SimulationsDokument8 SeitenAn Experimentally Verified Hybrid Cassie-Mayr Electric Arc Model For Power Electronics SimulationsThái Ngô VănNoch keine Bewertungen
- Axial Force Between A Thick Coil and A Cylindrical Permanent Magnet: Optimising The Geometry of An Electromagnetic ActuatorDokument11 SeitenAxial Force Between A Thick Coil and A Cylindrical Permanent Magnet: Optimising The Geometry of An Electromagnetic ActuatorOscar GutierrezNoch keine Bewertungen
- Design Prototyping and Analysis of A LowDokument13 SeitenDesign Prototyping and Analysis of A LowsarbiniNoch keine Bewertungen
- Modeling and Analysis of A Novel Two-Axis Rotary Electromagnetic Actuator For Fast Steering MirrorDokument10 SeitenModeling and Analysis of A Novel Two-Axis Rotary Electromagnetic Actuator For Fast Steering MirrorThirumurugan ChandrasekaranNoch keine Bewertungen
- Electromagnetic Force Analysis of A Driving CoilDokument6 SeitenElectromagnetic Force Analysis of A Driving CoilAngélica María CastrillónNoch keine Bewertungen
- A Modular Torsioanl Actuator Using Shape Memory Alloy WiresDokument8 SeitenA Modular Torsioanl Actuator Using Shape Memory Alloy WiresYoungshik KimNoch keine Bewertungen
- Automotive Applications of EMPT PDFDokument7 SeitenAutomotive Applications of EMPT PDFmohamad zareNoch keine Bewertungen
- Design of Shape Memory Alloy Actuated IntelligentDokument15 SeitenDesign of Shape Memory Alloy Actuated IntelligentaxatpgmeNoch keine Bewertungen
- Complex Vector Model of The Squirrel-Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDokument9 SeitenComplex Vector Model of The Squirrel-Cage Induction Machine Including Instantaneous Rotor Bar CurrentsAdil AbouelhassanNoch keine Bewertungen
- A Methos For Dynamic Simulation and Detection of Dynamic Air-Gap Eccentricity in Synchronous MachinesDokument3 SeitenA Methos For Dynamic Simulation and Detection of Dynamic Air-Gap Eccentricity in Synchronous Machinesafru2000Noch keine Bewertungen
- Modeling and Simulation of A 3 InductiDokument9 SeitenModeling and Simulation of A 3 InductiLala's gamingNoch keine Bewertungen
- Smartwingfinal AfterreviewDokument33 SeitenSmartwingfinal Afterreviewadeodatoarthur2020Noch keine Bewertungen
- IET Electric Power Appl - 2020 - Ahmad - Design of A High Thrust Density Moving Magnet Linear Actuator With Magnetic FluxDokument7 SeitenIET Electric Power Appl - 2020 - Ahmad - Design of A High Thrust Density Moving Magnet Linear Actuator With Magnetic FluxDONE AND DUSTEDNoch keine Bewertungen
- RF Series Switch PDFDokument6 SeitenRF Series Switch PDFAnonymous ybl4y5RIlNoch keine Bewertungen
- DC Analitic SystemDokument6 SeitenDC Analitic SystemDobai SzilardNoch keine Bewertungen
- Comparison of Geometry-Based Transformer Iron-Core Models For Inrush-Current and Residual-Flux CalculationsDokument7 SeitenComparison of Geometry-Based Transformer Iron-Core Models For Inrush-Current and Residual-Flux CalculationsjorgeayreNoch keine Bewertungen
- Magnetic Leviation Train ProjectDokument7 SeitenMagnetic Leviation Train ProjectMd.Sameul IslamNoch keine Bewertungen
- Research On A Slide-Contact Type Linear Electromagnetic CatapultDokument5 SeitenResearch On A Slide-Contact Type Linear Electromagnetic Catapultbryan andres mora ramosNoch keine Bewertungen
- 04 Wheel Axial Flux SRM Drive Light Electric VehiclesDokument8 Seiten04 Wheel Axial Flux SRM Drive Light Electric VehiclesSek PyroNoch keine Bewertungen
- Inductance Calculation Method of Synchronous Reluctance MotorDokument4 SeitenInductance Calculation Method of Synchronous Reluctance MotorAbhishek AgarwalNoch keine Bewertungen
- Ghandi 2002Dokument21 SeitenGhandi 2002Edjan TomazNoch keine Bewertungen
- A Time-Stepping Coupled Finite Element-State Space Model For Im DrivesDokument3 SeitenA Time-Stepping Coupled Finite Element-State Space Model For Im Drivessajs201100% (1)
- Elementary Analysis of Segmental StatorDokument7 SeitenElementary Analysis of Segmental StatordafNoch keine Bewertungen
- CST Whitepaper Magnetron CST WebDokument8 SeitenCST Whitepaper Magnetron CST WebGiancarloRichardRivadeneyraMirandaNoch keine Bewertungen
- 66 Gorbet Rev2 PDFDokument10 Seiten66 Gorbet Rev2 PDFJohnRenzoMolinarNoch keine Bewertungen
- IJSRDV6I22096Dokument2 SeitenIJSRDV6I22096David FilipeNoch keine Bewertungen
- Characteristic Research of Electromagnetic Force For Mixing Suspension Electromagnet Used in Low-Speed Maglev TrainDokument7 SeitenCharacteristic Research of Electromagnetic Force For Mixing Suspension Electromagnet Used in Low-Speed Maglev Trainvitamina01Noch keine Bewertungen
- Realization of 3D Electromagnetic and Thermal Analyzes of The Autotransformer by Finite Elements MethodDokument6 SeitenRealization of 3D Electromagnetic and Thermal Analyzes of The Autotransformer by Finite Elements MethodAkash VermaNoch keine Bewertungen
- Mathematical Modeling and Simulation of Permanent Magnet Synchronous MachineDokument6 SeitenMathematical Modeling and Simulation of Permanent Magnet Synchronous MachineFaiza OuiddirNoch keine Bewertungen
- Axial-Flux Permanent-Magnet Synchronous Generator WithDokument9 SeitenAxial-Flux Permanent-Magnet Synchronous Generator WithSeksan KhamkaewNoch keine Bewertungen
- A Method For Modeling Nonlinear Core Characteristics of Transformers During TransientsDokument10 SeitenA Method For Modeling Nonlinear Core Characteristics of Transformers During TransientsIlona Dr. SmunczNoch keine Bewertungen
- Ijaret 09 02 008Dokument10 SeitenIjaret 09 02 008Rajesh Kumar PaulNoch keine Bewertungen
- tmp1741 TMPDokument5 Seitentmp1741 TMPFrontiersNoch keine Bewertungen
- Complex Vector Model of The Squirrel Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDokument8 SeitenComplex Vector Model of The Squirrel Cage Induction Machine Including Instantaneous Rotor Bar CurrentsJorge Luis SotoNoch keine Bewertungen
- 1 s2.0 S0888327021001059 MainDokument17 Seiten1 s2.0 S0888327021001059 Main1392297140sNoch keine Bewertungen
- Employing Shape Memory Alloys As Efficient Rapid Robotic Joint ActuatorsDokument22 SeitenEmploying Shape Memory Alloys As Efficient Rapid Robotic Joint ActuatorsAli pitchNoch keine Bewertungen
- Analysis and Comparison of Two Brushless DC Generators With Doubly Salient Structure and Stator Field WindingDokument4 SeitenAnalysis and Comparison of Two Brushless DC Generators With Doubly Salient Structure and Stator Field WindingmohammadNoch keine Bewertungen
- A New Flywheel Energy Storage System: Using Hybrid Superconducting Magnetic BearingsDokument4 SeitenA New Flywheel Energy Storage System: Using Hybrid Superconducting Magnetic BearingsDeepak SharmaNoch keine Bewertungen
- Unit 2 D.C. MachinesDokument33 SeitenUnit 2 D.C. MachinesnandhakumarmeNoch keine Bewertungen
- Rios10 Submission 32Dokument7 SeitenRios10 Submission 32M.EhsanNoch keine Bewertungen
- Comb Drive ArtDokument5 SeitenComb Drive ArtIonescu ViorelNoch keine Bewertungen
- Electromagnetic Torque Capabilities of Axial-Flux and Radial-Flux Permanent-Magnet MachinesDokument4 SeitenElectromagnetic Torque Capabilities of Axial-Flux and Radial-Flux Permanent-Magnet MachinessosiNoch keine Bewertungen
- Flux Characteristics Analysis of A Single-Phase Tubular Switched Reluctance Linear Launcher Based On 3-D Magnetic Equivalent CircuitDokument7 SeitenFlux Characteristics Analysis of A Single-Phase Tubular Switched Reluctance Linear Launcher Based On 3-D Magnetic Equivalent CircuitRahulKashyapNoch keine Bewertungen
- KIffouzar RRST 2 2016 PP 137-141Dokument6 SeitenKIffouzar RRST 2 2016 PP 137-141hamza mesaiNoch keine Bewertungen
- Dynamic Model of Solenoids Under Impact Excitation, Including Motion and Eddy CurrentsDokument10 SeitenDynamic Model of Solenoids Under Impact Excitation, Including Motion and Eddy Currentsalejandro restrepoNoch keine Bewertungen
- Derating of Asymetric PID 117539.PDF JsessionidDokument9 SeitenDerating of Asymetric PID 117539.PDF Jsessionidaqaish15Noch keine Bewertungen
- Magnetic Bearings in Kinetic Energy Storage Systems For VehicularDokument12 SeitenMagnetic Bearings in Kinetic Energy Storage Systems For Vehicularmahmoud mohamedNoch keine Bewertungen
- Principles of A Permanent-Magnet Axial-Field D.CDokument6 SeitenPrinciples of A Permanent-Magnet Axial-Field D.CHoang Hoang LeNoch keine Bewertungen
- A Finite Element Method of Modelling and Designing of An ACCC ConductorDokument5 SeitenA Finite Element Method of Modelling and Designing of An ACCC ConductoramitbheltbgNoch keine Bewertungen
- Simulation of A Switched Reluctance Motors Using Matlab M-FileDokument6 SeitenSimulation of A Switched Reluctance Motors Using Matlab M-FileJeronimoNoch keine Bewertungen
- Conf 5 SFD Isma2007 Tqthanh 2Dokument6 SeitenConf 5 SFD Isma2007 Tqthanh 2THANH TRUONG QUOCNoch keine Bewertungen
- Tie.2003.80941520211014 31894 12p42bl With Cover Page v2Dokument6 SeitenTie.2003.80941520211014 31894 12p42bl With Cover Page v2محمد امین نیشابوریNoch keine Bewertungen
- Design of High Performance Linear Brushless DC Motor With Ironless CoreDokument6 SeitenDesign of High Performance Linear Brushless DC Motor With Ironless CoreShubhzsNoch keine Bewertungen
- Analysis With Finite Element Method of Wire Rope: TM TMDokument4 SeitenAnalysis With Finite Element Method of Wire Rope: TM TMHanifiantoNoch keine Bewertungen
- 10 1 1 1034 5168 PDFDokument6 Seiten10 1 1 1034 5168 PDFRosa Elvira Montalvo MartínezNoch keine Bewertungen
- Single and Three Phase Wattmeters and Energy Meters Single Phase Induction Type MetersDokument22 SeitenSingle and Three Phase Wattmeters and Energy Meters Single Phase Induction Type MetersWilliams A.Subanth Assistant ProfessorNoch keine Bewertungen
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsVon EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNoch keine Bewertungen
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsVon EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNoch keine Bewertungen
- Condition Based Monitoring For HT Motor (Inhouse) S.No Name of Test DescriptionDokument11 SeitenCondition Based Monitoring For HT Motor (Inhouse) S.No Name of Test DescriptionYadav AkhileshNoch keine Bewertungen
- Assignment#3 Atif AliDokument8 SeitenAssignment#3 Atif AliAtif AliNoch keine Bewertungen
- Deliver Better Customer Experiences With Machine Learning in Real-Time - HandoutDokument27 SeitenDeliver Better Customer Experiences With Machine Learning in Real-Time - Handoutanil987vermaNoch keine Bewertungen
- D193 Exp V1.00Dokument190 SeitenD193 Exp V1.00jarin taglientoNoch keine Bewertungen
- Benchmark H4000 Hotplate Stirrer Instruction ManualDokument1 SeiteBenchmark H4000 Hotplate Stirrer Instruction ManualKenneth SaganNoch keine Bewertungen
- Assignment 1:: Problem 1Dokument1 SeiteAssignment 1:: Problem 1Sohaib QaisarNoch keine Bewertungen
- FullStack Cafe Interview PlanDokument6 SeitenFullStack Cafe Interview PlanAnkurNoch keine Bewertungen
- 1 Cartesian Coordinate SystemsDokument26 Seiten1 Cartesian Coordinate SystemsQasimWarisNoch keine Bewertungen
- (SV) Video Conference CallsDokument10 Seiten(SV) Video Conference CallsAna Luiza BaptistaNoch keine Bewertungen
- SS - TLS - TL3465HF TL3570 TL3870HF - S4 B41N B41P B3ZS B3ZT B3zu B3ZV enDokument3 SeitenSS - TLS - TL3465HF TL3570 TL3870HF - S4 B41N B41P B3ZS B3ZT B3zu B3ZV enKamil SiudowskiNoch keine Bewertungen
- Forensic Accounting Literature ReviewDokument7 SeitenForensic Accounting Literature Reviewc5sd1aqj100% (1)
- Service Manual: 17-Inch LCD Monitor f1723/FP7317/L1702/ vf17/FP17Dokument27 SeitenService Manual: 17-Inch LCD Monitor f1723/FP7317/L1702/ vf17/FP17Juan Nepomuceno Cortina GoseacocheaNoch keine Bewertungen
- 9ma0 01 Rms 20230817Dokument35 Seiten9ma0 01 Rms 20230817aali010800Noch keine Bewertungen
- Ajit Singh Yadav Roll No 02 IIFT 2009-12-Spanish Project On TCS Latin AmericaDokument10 SeitenAjit Singh Yadav Roll No 02 IIFT 2009-12-Spanish Project On TCS Latin AmericaAjit SinghNoch keine Bewertungen
- SPD Compatible Pedals: SM-SH51 SM-SH55Dokument1 SeiteSPD Compatible Pedals: SM-SH51 SM-SH55Bernardo LizardiNoch keine Bewertungen
- 1 s2.0 S1877050922018336 MainDokument8 Seiten1 s2.0 S1877050922018336 MainIdvano IdboyNoch keine Bewertungen
- Optimization of Multi-Stage Constant Current Charging Pattern Based OnDokument9 SeitenOptimization of Multi-Stage Constant Current Charging Pattern Based OnBao BaoNoch keine Bewertungen
- ECA Particles in Parenterals KombiDokument6 SeitenECA Particles in Parenterals KombiBLUEPRINT Integrated Engineering ServicesNoch keine Bewertungen
- Technical D-313 Datasheet ENDokument2 SeitenTechnical D-313 Datasheet ENnikola.markovicNoch keine Bewertungen
- SWOT RelianceJIoDokument5 SeitenSWOT RelianceJIoRaj GuptaNoch keine Bewertungen
- Esquema Electrico 324 DFMDokument28 SeitenEsquema Electrico 324 DFMHeidi Cuevas Venegas100% (1)
- SMAJ Transient Voltage Suppressor Diode Series: Features ApplicationsDokument6 SeitenSMAJ Transient Voltage Suppressor Diode Series: Features ApplicationsTirwanda EdhoNoch keine Bewertungen
- IPUE208b-Equations of StateDokument5 SeitenIPUE208b-Equations of StateRandy SooknananNoch keine Bewertungen
- Thermaline 4900 PDSDokument4 SeitenThermaline 4900 PDSDuongthithuydungNoch keine Bewertungen
- DBF-Proposal Final FinalDokument5 SeitenDBF-Proposal Final FinalSaif RezaNoch keine Bewertungen
- Business Analytics - The Science of Data Driven Decision MakingDokument55 SeitenBusiness Analytics - The Science of Data Driven Decision Makingmathewsujith31Noch keine Bewertungen
- Container Refrigeration: Service Parts List For 69NT40 531 Series Container Refrigeration UnitsDokument88 SeitenContainer Refrigeration: Service Parts List For 69NT40 531 Series Container Refrigeration UnitsshinigamisffNoch keine Bewertungen
- School of Electrical, Electronics and Computer EngineeringDokument12 SeitenSchool of Electrical, Electronics and Computer EngineeringKim Andre MacaraegNoch keine Bewertungen
- ECA2+ Tests Language Test 4C 2018Dokument6 SeitenECA2+ Tests Language Test 4C 2018Czarek MNoch keine Bewertungen
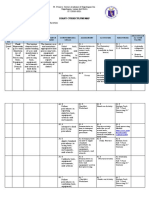
- Diary Curriculum Map: Food Processin G Use andDokument5 SeitenDiary Curriculum Map: Food Processin G Use andJo-an Wapille NiniNoch keine Bewertungen