Das könnte Ihnen auch gefallen
- P1 Chapter 8::: Binomial ExpansionDokument26 SeitenP1 Chapter 8::: Binomial ExpansionPrince YugNoch keine Bewertungen
- API 617 stability analysis of centrifugal compressorsDokument10 SeitenAPI 617 stability analysis of centrifugal compressorsthlim19078656Noch keine Bewertungen
- Document Title: Revision: Vendor Rev.: Facility Identifier: Discipline: Document Type: Project Doc. Number: Vendor Doc. NumberDokument7 SeitenDocument Title: Revision: Vendor Rev.: Facility Identifier: Discipline: Document Type: Project Doc. Number: Vendor Doc. Numberrajindo1Noch keine Bewertungen
- 4000046273-PGCA-EA-C01-010 - C1 - 1 - Package InstrumentDokument4 Seiten4000046273-PGCA-EA-C01-010 - C1 - 1 - Package Instrumentrajindo1Noch keine Bewertungen
- 43 - Control Room Supervisor Ayman - MohamedDokument3 Seiten43 - Control Room Supervisor Ayman - Mohamedsudeesh kumarNoch keine Bewertungen
- 4000046273-PGCA-EA-C06-003 - C1 - 1 - Datasheet Lube Oil CoolerDokument5 Seiten4000046273-PGCA-EA-C06-003 - C1 - 1 - Datasheet Lube Oil Coolerrajindo1Noch keine Bewertungen
- Lect 6Dokument26 SeitenLect 6ashoku2Noch keine Bewertungen
- A Prison DiaryDokument5 SeitenA Prison Diarypranshu rathiNoch keine Bewertungen
- Compressor AntisurgeDokument12 SeitenCompressor AntisurgeSaqib NazirNoch keine Bewertungen
- Document Title: Revision: Vendor Rev.: Facility Identifier: Discipline: Document Type: Project Doc. Number: Vendor Doc. NumberDokument5 SeitenDocument Title: Revision: Vendor Rev.: Facility Identifier: Discipline: Document Type: Project Doc. Number: Vendor Doc. Numberrajindo1Noch keine Bewertungen
- 4000046273-PGCA-EA-C01-001 - C1 - 1 - Fuel Gas SupplyDokument10 Seiten4000046273-PGCA-EA-C01-001 - C1 - 1 - Fuel Gas Supplyrajindo1Noch keine Bewertungen
- 4000046273-PGCA-EA-C16-001 - 5.2 - 3 - Cause and Eff PDFDokument20 Seiten4000046273-PGCA-EA-C16-001 - 5.2 - 3 - Cause and Eff PDFrajindo1Noch keine Bewertungen
- 4000046273-PGCA-EA-C01-002 - C1 - 1 - Liquied FuelDokument6 Seiten4000046273-PGCA-EA-C01-002 - C1 - 1 - Liquied Fuelrajindo1Noch keine Bewertungen
- Major Types of Linear Controllers: University of Waterloo - SD 352 99 186Dokument38 SeitenMajor Types of Linear Controllers: University of Waterloo - SD 352 99 186Dinesh Kumar SharmaNoch keine Bewertungen
- SOP CalculationDokument8 SeitenSOP Calculationmatteo2009Noch keine Bewertungen
- Compressor Exams SolutionsDokument18 SeitenCompressor Exams SolutionsMohamed BalbaaNoch keine Bewertungen
- Fuel Flexibility in Conventional and Dry Low Emissions Industrial Gas TurbinesDokument30 SeitenFuel Flexibility in Conventional and Dry Low Emissions Industrial Gas TurbinesHenrik13Noch keine Bewertungen
- STI Reciprocating CompressorDokument29 SeitenSTI Reciprocating CompressorfazzlieNoch keine Bewertungen
- Review EOR: Dosen: Ir Andry Halim, MM STT MIGAS, Balikpapan 2006Dokument42 SeitenReview EOR: Dosen: Ir Andry Halim, MM STT MIGAS, Balikpapan 2006Ducke Cristie Elias LatumetenNoch keine Bewertungen
- Application Guideline For Cent Comp Surge ControlDokument75 SeitenApplication Guideline For Cent Comp Surge ControlPedro MunizNoch keine Bewertungen
- Article PowerIowaBlackStartDokument3 SeitenArticle PowerIowaBlackStartFabio PascucciNoch keine Bewertungen
- Isothermal Work and Polytropic WorkdoneDokument53 SeitenIsothermal Work and Polytropic WorkdoneGeorgeNoch keine Bewertungen
- Efficient Driving at Variable Speeds World Pumps Vol 2013 Issue 4 0Dokument4 SeitenEfficient Driving at Variable Speeds World Pumps Vol 2013 Issue 4 0IzallmachineNoch keine Bewertungen
- Novel Method of Detection of Surge - Gas Machinery Journal Q2 - 13Dokument16 SeitenNovel Method of Detection of Surge - Gas Machinery Journal Q2 - 13mantosh_bhattacharyaNoch keine Bewertungen
- Sulzer - Your Partner For Hydraulic Power RecoveryDokument8 SeitenSulzer - Your Partner For Hydraulic Power RecoveryAnonymous uCYIu1100% (1)
- System Overview Digital Turbine Control SystemsDokument56 SeitenSystem Overview Digital Turbine Control SystemsAshutosh Yadav100% (2)
- Variable Inlet Guide VaneDokument3 SeitenVariable Inlet Guide Vaneocean220220Noch keine Bewertungen
- Total Head CalculationDokument16 SeitenTotal Head CalculationZaid Al RayesNoch keine Bewertungen
- Polymer Composite Systems in Pipeline Repair: Design, Manufacture, Application, and Environmental ImpactsVon EverandPolymer Composite Systems in Pipeline Repair: Design, Manufacture, Application, and Environmental ImpactsSanjay Mavinkere RangappaNoch keine Bewertungen
- Compressor OperationDokument21 SeitenCompressor OperationAhmed Mohamed KhalilNoch keine Bewertungen
- Driving Centrifugal Compressor TechnologyDokument52 SeitenDriving Centrifugal Compressor TechnologySHRIKANT GADENoch keine Bewertungen
- Centrifugal Compressor Surge Control AnalysisDokument3 SeitenCentrifugal Compressor Surge Control AnalysisEdward JulianNoch keine Bewertungen
- Influence of The Reynolds Number On The Performance of Centrifugal CompressorsDokument3 SeitenInfluence of The Reynolds Number On The Performance of Centrifugal CompressorsAmbrish SinghNoch keine Bewertungen
- Centrifugal Compressor Inducer PDFDokument11 SeitenCentrifugal Compressor Inducer PDFmistrycsNoch keine Bewertungen
- Centrifugal Compressors MAN-GEDokument20 SeitenCentrifugal Compressors MAN-GEIbc Cbs Ibc CbsNoch keine Bewertungen
- Turbine Off-Frequency Operation: GE Power SystemsDokument4 SeitenTurbine Off-Frequency Operation: GE Power Systemskcirrenwod100% (1)
- Challenges in Supercritical CO2 Power Cycle Technology and First OperationalDokument16 SeitenChallenges in Supercritical CO2 Power Cycle Technology and First OperationalAdven Brilian100% (1)
- RG Integrally Geared Compressors PDFDokument6 SeitenRG Integrally Geared Compressors PDFJaswindersingh BhatiaNoch keine Bewertungen
- KMBD BP(国外罗茨泵ROOTS)Dokument2 SeitenKMBD BP(国外罗茨泵ROOTS)tutuli1990Noch keine Bewertungen
- C Module-5 Reciprocating Air Compressors. Reciprocating Compressors - Construction - WorkingDokument48 SeitenC Module-5 Reciprocating Air Compressors. Reciprocating Compressors - Construction - WorkingJasraj Gill100% (1)
- Design and Analysis of Centrifugal CompressorsVon EverandDesign and Analysis of Centrifugal CompressorsNoch keine Bewertungen
- Active magnetic bearing design and characterization for high temperature applicationsDokument147 SeitenActive magnetic bearing design and characterization for high temperature applicationsVijayTijareNoch keine Bewertungen
- Actuators and Valve Positioners GuideDokument6 SeitenActuators and Valve Positioners GuideMohamed Arriff100% (1)
- Joule Thomson ExpansionDokument2 SeitenJoule Thomson ExpansiondndudcNoch keine Bewertungen
- Dry Screw Vs Oil Flooded ScrewDokument2 SeitenDry Screw Vs Oil Flooded Screwkichas100% (1)
- F 0077 e 55Dokument6 SeitenF 0077 e 55Bùi Cảnh TrungNoch keine Bewertungen
- Noruegan StandardDokument152 SeitenNoruegan StandarderikohNoch keine Bewertungen
- Supplementary Requirements To IEC 61439-1 & 2 LV Switchgear & ControlgearDokument36 SeitenSupplementary Requirements To IEC 61439-1 & 2 LV Switchgear & ControlgearMauro MLR0% (1)
- Thermodynamics An Engineering Approach 8Dokument1 SeiteThermodynamics An Engineering Approach 8Aracely PenaNoch keine Bewertungen
- Centrifugal Gas Compressor Volume 1Dokument32 SeitenCentrifugal Gas Compressor Volume 1Gilang AdityaNoch keine Bewertungen
- Centrifugal Compressor HorsepowerDokument9 SeitenCentrifugal Compressor HorsepowerCurtis DookieNoch keine Bewertungen
- 20b GT PART2 PDFDokument178 Seiten20b GT PART2 PDFHANIF AKBARNoch keine Bewertungen
- Research and Development Needs for Advanced CO2 Compression TechnologiesDokument34 SeitenResearch and Development Needs for Advanced CO2 Compression Technologiesthlim19078656100% (1)
- IntroDokument52 SeitenIntrosaranyabhuvanaNoch keine Bewertungen
- Influence of The Nature of The Roots Blower On Pressure Fluctuations in A Fluidized BedDokument13 SeitenInfluence of The Nature of The Roots Blower On Pressure Fluctuations in A Fluidized BedcoolcupidguyNoch keine Bewertungen
- Pulsation Supression DeviceDokument9 SeitenPulsation Supression Devicesswoo3868Noch keine Bewertungen
- Introduction to LP & MP CompressorsDokument61 SeitenIntroduction to LP & MP Compressorschuminh100% (1)
- International Thermodynamic Tables of the Fluid State, Argon, 1971: Division of Physical Chemistry, Commission on Thermodynamics and Thermochemistry, Thermodynamic Tables ProjectVon EverandInternational Thermodynamic Tables of the Fluid State, Argon, 1971: Division of Physical Chemistry, Commission on Thermodynamics and Thermochemistry, Thermodynamic Tables ProjectNoch keine Bewertungen
- Practical Chemical Thermodynamics for GeoscientistsVon EverandPractical Chemical Thermodynamics for GeoscientistsNoch keine Bewertungen
- Robustness Analysis - MTALABDokument36 SeitenRobustness Analysis - MTALABptkacNoch keine Bewertungen
- Bladed Theory ManualDokument90 SeitenBladed Theory Manualptkac100% (1)
- Lecture 6 - Induction MotorsDokument34 SeitenLecture 6 - Induction Motorsswamy_satya20004521Noch keine Bewertungen
- An Adaptive Control AlgorithmDokument98 SeitenAn Adaptive Control AlgorithmptkacNoch keine Bewertungen
- 4 - Odd Hours - Dean KoontzDokument261 Seiten4 - Odd Hours - Dean KoontzJustinSnow80% (5)
- Genset Ops Manual 69ug15 PDFDokument51 SeitenGenset Ops Manual 69ug15 PDFAnonymous NYymdHgy100% (1)
- Otology Fellowships 2019Dokument5 SeitenOtology Fellowships 2019Sandra SandrinaNoch keine Bewertungen
- ZP Series Silicon Rectifier: Standard Recovery DiodesDokument1 SeiteZP Series Silicon Rectifier: Standard Recovery DiodesJocemar ParizziNoch keine Bewertungen
- Steroids ActivityDokument1 SeiteSteroids Activityfaqed ilzakiraNoch keine Bewertungen
- Lines WorksheetDokument3 SeitenLines WorksheetJuzef StaljinNoch keine Bewertungen
- Notes Lecture No 3 Cell Injury and MechanismDokument5 SeitenNotes Lecture No 3 Cell Injury and MechanismDr-Rukhshanda RamzanNoch keine Bewertungen
- SAP Technical Consultant resumeDokument11 SeitenSAP Technical Consultant resumeKallol BhowmickNoch keine Bewertungen
- Afforestation in Arid and Semi Arid RegionsDokument68 SeitenAfforestation in Arid and Semi Arid RegionsMilian Marian SanduNoch keine Bewertungen
- Asme NM.2-2018Dokument126 SeitenAsme NM.2-2018aneeshjokay75% (4)
- 632 MA Lichauco vs. ApostolDokument2 Seiten632 MA Lichauco vs. ApostolCarissa CruzNoch keine Bewertungen
- Mechanical Thrombectomy For Acute Ischemic StrokeDokument19 SeitenMechanical Thrombectomy For Acute Ischemic StrokeCarlos Alfredo Vargas QuinteroNoch keine Bewertungen
- BOD FormatDokument4 SeitenBOD FormatSkill IndiaNoch keine Bewertungen
- The Push Pull Legs RoutineDokument4 SeitenThe Push Pull Legs RoutineSparkbuggy57% (7)
- NMC Confirmation FormDokument3 SeitenNMC Confirmation FormGianina AvasiloaieNoch keine Bewertungen
- Sunflower Herbicide ChartDokument2 SeitenSunflower Herbicide ChartpapucicaNoch keine Bewertungen
- Lesson 8 - Philippine Disaster Risk Reduction and Management SystemDokument11 SeitenLesson 8 - Philippine Disaster Risk Reduction and Management SystemMary Joy CuetoNoch keine Bewertungen
- Informática Ejercicios IDokument10 SeitenInformática Ejercicios IAlejandroMendezNoch keine Bewertungen
- 3000 CalorieDokument10 Seiten3000 CalorieNIKHILNoch keine Bewertungen
- Thermo Drain 52 Pages - CatalogueDokument52 SeitenThermo Drain 52 Pages - CatalogueSandeep Nair100% (1)
- Batson Et All - 2007 - Anger and Unfairness - Is It Moral Outrage?Dokument15 SeitenBatson Et All - 2007 - Anger and Unfairness - Is It Moral Outrage?Julia GonzalezNoch keine Bewertungen
- Edna Adan University ThesisDokument29 SeitenEdna Adan University ThesisAbdi KhadarNoch keine Bewertungen
- Vastra Grah .Pvt. LTD: In-House Manufacturing FacaltyDokument2 SeitenVastra Grah .Pvt. LTD: In-House Manufacturing FacaltySaurabh JainNoch keine Bewertungen
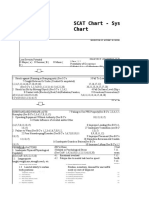
- SCAT Chart - Systematic Cause Analysis Technique - SCAT ChartDokument6 SeitenSCAT Chart - Systematic Cause Analysis Technique - SCAT ChartSalman Alfarisi100% (1)
- Rajasthan PET Chemistry 1997 Exam with Detailed SolutionsDokument34 SeitenRajasthan PET Chemistry 1997 Exam with Detailed SolutionsYumit MorwalNoch keine Bewertungen
- Diploma Pharmacy First Year - Hap - MCQSDokument13 SeitenDiploma Pharmacy First Year - Hap - MCQSAnitha Mary Dambale91% (33)
- Ulcus Decubitus PDFDokument9 SeitenUlcus Decubitus PDFIrvan FathurohmanNoch keine Bewertungen
- Disha Symbiosis 20th JulyDokument2 SeitenDisha Symbiosis 20th JulyhippieatheartbalewadiNoch keine Bewertungen
- Understanding Empathy and SympathyDokument2 SeitenUnderstanding Empathy and SympathyFrinces MarvidaNoch keine Bewertungen
- S6MT 1Q w1 3 MELC1 SLM MIXTURES FinalCopy09082020Dokument26 SeitenS6MT 1Q w1 3 MELC1 SLM MIXTURES FinalCopy09082020Rona Dindang100% (1)