Beruflich Dokumente
Kultur Dokumente
Transitorios
Hochgeladen von
mike151982Originaltitel
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Transitorios
Hochgeladen von
mike151982Copyright:
Verfügbare Formate
Transitorios en Redes
Electricas
Enrique Melgoza Vazquez
Instituto Tecnologico de Morelia
Junio 2007
ii
Prefacio
La ocurrencia de fenomenos transitorios en redes electricas es inevitable: ya
sea por maniobras propias de la operacion de tales redes, por fallas en alg un
punto, o la presencia de sobretensiones atmosfericas, el hecho es que en toda
red electrica van a ocurrir fenomenos de relativamente corta duracion que
son la transicion de un estado de la red a otro.
El estudio de los fenomenos transitorios en redes electricas es importante
porque durante la ocurrencia de tales condiciones se presentan las magnitudes
mas elevadas de voltajes y corrientes.
Esta caracterstica no deja de ser pecu-
liar: aunque la mayor parte del tiempo el sistema opere en el estado estable,
los esfuerzos mas severos, tanto mecanicos como termicos y dielectricos, de
hecho ocurren durante los breves periodos de duracion de los transitorios.
Puesto que la especicacion, seleccion y dise no de los equipos deben basarse
en el conocimiento de las maximas magnitudes esperadas de las variables
electricas, es necesario estimar tales magnitudes mediante el analisis de sus
causas.
Antes de llevar a cabo el analisis de los fenomenos transitorios, debe
contarse con modelos matematicos de los equipos y componentes envueltos
en el disturbio. Generalmente el modelo de un equipo para un estudio de
transitorios es distinto del modelo para un estudio en estado estacionario,
y por lo general mucho mas elaborado y complejo. Por ejemplo, el modelo
de estado estacionario de un transformador es una impedancia serie; para
un estudio de transitorios en el que interese la distribucion interna de las
sobretensiones en el devanado del transformador, por ejemplo, secciones de la
bobina se modelan individualmente, con capacitancias a tierra e inductancias
mutuas.
Estas notas tienen la nalidad de presentar los fundamentos de analisis de
fenomenos transitorios en redes electricas. Se repasan las tecnicas de analisis
de circuitos de parametros concentrados, puesto que muchos fenomenos de
iii
iv PREFACIO
conmutacion pueden estudiarse mediante ese tipo de modelos. Las soluciones
analticas para los casos mas simples proporcionan una perspectiva util para
el analista acerca de cual es el comportamiento esperado. Puesto que para
redes mas grandes la solucion analtica resulta impractica, se consideran al-
gunos metodos de simulacion, es decir de calculo numerico; un punto nove-
doso en este aspecto es la inclusion de una seccion sobre la sntesis y solucion
numerica de ecuaciones de estado. Con ellas, es posible simular transitorios
electricos a un cuando no se cuente con un programa computacional especial-
izado.
Existen complejos paquetes computacionales para el estudio de fenomenos
transitorios, tanto gratuitos como comerciales. ATP (Alternative Transients
Program) y EMTP (Electromagnetic Transientes Program) son ejemplos de
cada categora. El principio de discretizacion en que se basan estos paquetes
se discute, y se presentan ejemplos de su uso. Con esas bases es posible
presentar las caractersticas de disturbios originados por el cierre o apertura
de interruptores en la red, los denominados transitorios de conmutaci on.
Los puntos anteriores se desarrollan desde el punto de vista de modelos de
parametros concentrados. Sin embargo, la presencia de lneas de transmision
largas hace necesario considerar que la propagacion de un disturbio en un
extremo tarda un tiempo en aparecer en el otro. Un modelo de parametros
distribudos es entonces necesario, el cual una vez determinado se utiliza en
el analisis de condiciones peculiares no observadas en redes de parametros
concentrados.
A lo largo de la presentaci on se presentan modelos simples de los compo-
nentes del sistema, los cuales se juzgan adecuados para el tipo de fenomeno
transitorio discutido. Sin embargo, el lector debe recordar que un modelo
dado no es siempre aplicable a otras situaciones: si el rango de frecuencias
del fenomeno cambia radicalmente, el modelo puede resultar por completo
inadecuado.
Contenido
Prefacio iii
I Metodos de solucion y simulaci on 1
1 Metodos de solucion 3
1.1 Circuitos de parametros concentrados . . . . . . . . . . . . . . 3
1.2 Naturaleza de las ecuaciones . . . . . . . . . . . . . . . . . . . 5
1.3 Ecuaciones homogeneas de primer orden . . . . . . . . . . . . 5
1.3.1 Circuito RL . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3.2 Constante de tiempo . . . . . . . . . . . . . . . . . . . 7
1.3.3 Ecuacion de corriente . . . . . . . . . . . . . . . . . . . 8
1.3.4 Circuito RC . . . . . . . . . . . . . . . . . . . . . . . . 9
1.4 Ecuaciones no homogeneas de primer orden . . . . . . . . . . 10
1.4.1 Metodo del factor integrante . . . . . . . . . . . . . . . 10
1.4.2 Metodo de separacion de variables . . . . . . . . . . . . 12
1.5 Ecuaciones homogeneas de segundo orden . . . . . . . . . . . 12
1.5.1 Circuito sin amortiguamiento . . . . . . . . . . . . . . 13
1.5.2 Circuito con amortiguamiento . . . . . . . . . . . . . . 16
1.6 Ecuaciones no homogeneas de segundo orden . . . . . . . . . . 19
1.7 Transformacion de Laplace . . . . . . . . . . . . . . . . . . . . 21
2 Metodos de simulacion 25
2.1 Ecuaciones de estado . . . . . . . . . . . . . . . . . . . . . . . 26
2.1.1 Conceptos de topologa de redes . . . . . . . . . . . . . 27
2.1.2 Determinacion directa de las ecuaciones . . . . . . . . 28
2.1.3 Analisis nodal modicado . . . . . . . . . . . . . . . . 30
2.1.4 Simulaci on . . . . . . . . . . . . . . . . . . . . . . . . . 30
v
vi CONTENIDO
2.1.5 Componentes no lineales . . . . . . . . . . . . . . . . . 32
2.1.6 Transformadores . . . . . . . . . . . . . . . . . . . . . 37
2.2 Circuitos asociados . . . . . . . . . . . . . . . . . . . . . . . . 39
2.2.1 Circuito asociado de un inductor . . . . . . . . . . . . 41
2.2.2 Circuito asociado de un capacitor . . . . . . . . . . . . 42
2.2.3 Proceso de simulaci on . . . . . . . . . . . . . . . . . . 42
II Programas de simulaci on 45
3 Introduccion a Matlab 47
3.1 Entorno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.2 Matrices y vectores . . . . . . . . . . . . . . . . . . . . . . . . 50
3.3 Funciones matriciales . . . . . . . . . . . . . . . . . . . . . . . 52
3.4 Solucion de ecuaciones lineales . . . . . . . . . . . . . . . . . . 54
3.5 Lenguaje de programacion . . . . . . . . . . . . . . . . . . . . 55
3.6 Gracacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.6.1 Figuras geometricas . . . . . . . . . . . . . . . . . . . . 57
3.7 Otros comandos utiles . . . . . . . . . . . . . . . . . . . . . . 58
4 Introduccion al ATP 61
4.1 Capacidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.2 ATP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.2.1 Como obtener el programa . . . . . . . . . . . . . . . . 64
4.2.2 Instalacion . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.2.3 Uso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.3 Gracadores . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.4 ATPDRAW . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.4.1 Instalacion . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.4.2 Uso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
III Transitorios en redes de parametros concentra-
dos 79
5 Modelado de componentes en baja frecuencia 81
5.1 Modelo de la fuente . . . . . . . . . . . . . . . . . . . . . . . . 81
5.1.1 Equivalente de Th`evenin . . . . . . . . . . . . . . . . . 82
CONTENIDO vii
5.1.2 Mejoras al modelo de equivalente de Th`evenin . . . . . 82
5.2 Modelo de la carga . . . . . . . . . . . . . . . . . . . . . . . . 84
5.2.1 Modelo de cargas compensadas . . . . . . . . . . . . . 84
5.3 Modelado de bancos de capacitores . . . . . . . . . . . . . . . 85
5.3.1 Resistencia de descarga . . . . . . . . . . . . . . . . . . 86
5.4 Apartarrayos . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
5.4.1 Modelado de apartarrayos de ZnO . . . . . . . . . . . . 87
6 Transitorios de conmutaci on 91
6.1 Energizacion de un circuito LR serie . . . . . . . . . . . . . . 91
6.2 Energizacion de capacitores . . . . . . . . . . . . . . . . . . . 94
6.2.1 Energizacion de segunda etapa de capacitores . . . . . 96
6.3 Interrupcion de un corto circuito . . . . . . . . . . . . . . . . 103
6.3.1 Conmutaci on con resistores . . . . . . . . . . . . . . . 106
6.4 Desenergizacion de carga inductiva . . . . . . . . . . . . . . . 107
6.4.1 Desenergizacion de cargas CLR . . . . . . . . . . . . . 113
6.5 Corte de corriente . . . . . . . . . . . . . . . . . . . . . . . . . 113
6.6 Re-ignicion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
6.6.1 Re-ignicion al desconectar capacitores . . . . . . . . . . 117
6.6.2 Re-ignicion al desconectar inductores . . . . . . . . . . 118
7 Transitorios en transformadores 123
7.1 Modelado de transformadores para bajas frecuencias . . . . . . 123
7.1.1 Datos requeridos . . . . . . . . . . . . . . . . . . . . . 124
7.1.2 Impedancia serie . . . . . . . . . . . . . . . . . . . . . 124
7.1.3 Rama de magnetizacion . . . . . . . . . . . . . . . . . 125
7.1.4 Inductancia inicial de magnetizacion . . . . . . . . . . 126
7.1.5 Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . 127
7.2 Corriente de irrupcion . . . . . . . . . . . . . . . . . . . . . . 128
7.2.1 Analisis del fenomeno . . . . . . . . . . . . . . . . . . . 129
7.3 Ferro-resonancia . . . . . . . . . . . . . . . . . . . . . . . . . . 131
7.3.1 Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . 132
7.4 Transferencia capacitiva . . . . . . . . . . . . . . . . . . . . . 136
7.5 Transitorios en devanados . . . . . . . . . . . . . . . . . . . . 136
viii CONTENIDO
IV Redes de parametros distribudos 139
8 Lneas de transmision 141
8.1 La ecuacion de onda . . . . . . . . . . . . . . . . . . . . . . . 142
8.2 Reexion y refraccion . . . . . . . . . . . . . . . . . . . . . . . 144
8.3 Terminaciones de lneas . . . . . . . . . . . . . . . . . . . . . . 146
8.3.1 Lnea terminada en corto circuito . . . . . . . . . . . . 146
8.3.2 Lnea terminada en circuito abierto . . . . . . . . . . . 147
8.3.3 Terminaci on general . . . . . . . . . . . . . . . . . . . 147
8.4 Lneas de transmision de potencia . . . . . . . . . . . . . . . . 148
8.4.1 Resistencia . . . . . . . . . . . . . . . . . . . . . . . . 148
8.4.2 Multiconductores . . . . . . . . . . . . . . . . . . . . . 148
8.4.3 Acoplamiento . . . . . . . . . . . . . . . . . . . . . . . 149
8.4.4 Modelado . . . . . . . . . . . . . . . . . . . . . . . . . 149
Parte I
Metodos de solucion y
simulacion
1
Captulo 1
Metodos de solucion
1.1 Circuitos de parametros concentrados
Se dice que se tiene un modelo de circuito de parametros concentrados cuando
los elementos que forman al sistema se representan mediante los elementos
ideales:
Resistor:
v = Ri, (1.1)
Inductor:
v = L
di
dt
, (1.2)
Capacitor:
i = C
dv
dt
, (1.3)
donde v es el voltaje presente en el elemento, e i la corriente a traves del
mismo. Por convencion, corriente positiva entra por la terminal de mayor
potencial. Los parametros R, L, C reciben el nombre de resistencia, in-
ductancia y capacitancia, respectivamente. Generalmente asumen un valor
constante y se dice que el componente es lineal; si dependen de la variable
fuente (por ejemplo si L depende de la magnitud de i como es el caso de com-
ponentes magneticamente saturables), entonces se habla de componentes no
lineales.
Ademas de los elementos se nalados, otros componentes circuito utilizados
en modelos de redes electricas son los siguientes:
3
4 CAP
ITULO 1. M
ETODOS DE SOLUCI
ON
Fuentes independientes:
v = v(t) (1.4)
i = i(t) (1.5)
Transformador ideal:
v
1
v
2
= a (1.6)
i
1
i
2
=
1
a
(1.7)
P
1
= v
1
i
1
= av
2
i
2
a
= v
2
i
2
= P
2
. (1.8)
Tambien existen fuentes dependientes. Un elemento com un en las redes
electricas es el interruptor (cortacircuitos), que en ocasiones no se incluye
como tal en los modelos de circuito, sino que se toma en cuenta en las ecua-
ciones respectivas como condicion inicial o cambios en la topologa de la red.
En ultima instancia, un modelo es una representacion de una situacion
fsica real y en general es preferible tener un modelo simple (entre otras cosas
porque permite una solucion analtica). Sin embargo, un modelo demasiado
simplicado no capturara el verdadero comportamiento del sistema. Con-
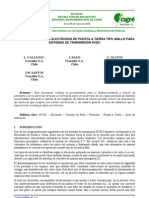
sidere el caso de un banco de capacitores con dos etapas en una subestacion.
Un modelo del sistema podra ser el mostrado en la Figura 1.1. La fuente y
su impedancia se representan mediante los parametros v
s
, R
s
y L
s
, mientras
que las etapas capacitivas son C
1
y C
2
. R
b
y L
b
representan la resistencia
e inductancia del bus entre las dos estapas; se han agregado porque de otra
manera se tendra una condicion no permitida al cerrar los capacitores C
1
y C
2
con distintos voltajes en cada uno de ellos. Mas a un, una resistencia
simple no reejara el fenomeno de oscilacion de alta frecuencia observable al
momento de la energizacion de la segunda etapa, y una inductancia simple
no da lugar a la atenuaci on observada. Entonces, el circuito mostrado es la
conguracion mas simple que modela la situacion real.
El proposito de este captulo es repasar algunos metodos de solucion ex-
acta de las ecuaciones de circuito, para aquellos casos en los que un modelo
de parametros concentrados es adecuado.
1.2. NATURALEZA DE LAS ECUACIONES 5
Vs
Rs Ls
S1 S2
C1 C2
Rb Lb
Figura 1.1: Modelo de circuito para un banco de capacitores de dos etapas.
1.2 Naturaleza de las ecuaciones
Para circuitos de parametros concentrados simples, puede obtenerse una
solucion analtica. Este tipo de solucion es preferible porque el efecto de
cada uno de los factores en el problema puede determinarse con facilidad
en la mayora de los casos. El comportamiento del sistema se puede captar
entonces con mas rapidez.
Puesto que los elemento comunes de circuitos son descritos por ecua-
ciones con una sola variable independiente (el tiempo, t), las ecuaciones que
describen a los sistemas electricos de parametros concentrados son diferen-
ciales ordinarias. Este tipo de ecuaciones puede resolverse en el caso lineal de
cualquier orden, y algunos casos no lineales [1]. Algunos metodos de solucion
se discuten en las secciones siguientes.
1.3 Ecuaciones homogeneas de primer orden
Este es el caso mas simple: un solo elemento almacenador de energa, sin
fuentes independientes en la red. La ecuacion resultante es entonces una
ecuacion diferencial homogenea de primer orden.
1.3.1 Circuito RL
Como ejemplo, para el circuito de la Figura 1.2 con una condicion inicial
i
L
(0) = I
0
, usando la ley de corrientes de Kirchho:
i
R
+ i
L
= 0 (1.9)
6 CAP
ITULO 1. M
ETODOS DE SOLUCI
ON
i i
+
-
v
R L
R L
Figura 1.2: Circuito RL.
v
R
+
1
L
t
0
vdt + i
L
(0) = 0 (1.10)
Derivando y multiplicando por R se llega a:
dv
dt
+
R
L
v = 0, (1.11)
que efectivamente es una ecuacion diferencial homogenea de primer orden (y
lineal en este caso). Observe que la ecuacion del circuito quedo en terminos
de la variable de voltaje v. La solucion de esta ecuacion se puede escribir
directamente, y es una funcion exponencial:
v = ke
R
L
t
. (1.12)
El valor de la constante k se obtiene sustituyendo la condicion inicial v(0) =
V
0
. Como la corriente I
0
fue especicada como condicion inicial, el voltaje
inicial se calcula mediante:
v(0) = V
0
= RI
0
= k. (1.13)
La solucion particular es entonces:
v = V
0
e
R
L
t
. (1.14)
En terminos gracos, la solucion obtenida es como se muestra en la Figura
1.3 (para I
0
> 0, es decir, V
0
< 0.
1.3. ECUACIONES HOMOG
ENEAS DE PRIMER ORDEN 7
0 1 2 3 4 5 6 7
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Figura 1.3: Voltaje en el circuito RL.
1.3.2 Constante de tiempo
La caracterstica curva de decaimiento exponencial nos resulta familiar. Lo
que la hace particular al circuito estudiado es el exponente R/L. Una
manera de captar la naturaleza de la respuesta del circuito cuando se varan
sus parametros es re-escribir la solucion (1.14) de la forma
v = V
0
e
, (1.15)
donde recibe el nombre de constante de tiempo del circuito. v tomara
los valores mostrados en la Tabla 1.1 para valores enteros de t/. Observe
que 0.368
2
= 0.135, 0.368
3
= 0.050, etc. Es decir, para cada intervalo igual a
la constante de tiempo, el voltaje disminuye al 36.8% del valor al inicio del
intervalo. Para t = 5, el transitorio practicamente ha terminado.
Para nuestro circuito, la constante de tiempo esta dada por
=
L
R
. (1.16)
Si L se mantiene sin cambio y R se incrementa, la constante de tiempo dis-
minuye, es decir, el transitorio se desvanece mas rapidamente. Puede pen-
sarse que la energa almacenada en el campo magnetico de la inductancia se
disipa mas rapidamente cuando se incrementa la resistencia. Si la resistencia
se disminuye, la energa se disipara mas lentamente o, equivalentemente, la
8 CAP
ITULO 1. M
ETODOS DE SOLUCI
ON
Tabla 1.1: Valores sucesivos de v para el circuito RL.
t/ v
0 V
0
1 0.368V
0
2 0.135V
0
3 0.050V
0
4 0.018V
0
5 0.007V
0
constante de tiempo aumenta. Una analisis similar indica que la constante
de tiempo aumenta con la inductancia.
1.3.3 Ecuacion de corriente
En el mismo circuito, si usamos la ley de voltajes de Kirchho, se tiene:
Ri
R
+ L
di
L
dt
= 0, (1.17)
i
R
= i
L
= i, (1.18)
di
dt
+
R
L
i = 0, (1.19)
que es, matematicamente, la misma ecuacion que (1.11) y por lo tanto tiene
la solucion
i = I
0
e
R
L
t
. (1.20)
La naturaleza exponencial de esta respuesta es la misma que en el caso de la
solucion para el voltaje. El efecto de los parametros R, L en la respuesta es
el mismo ya discutido. En el caso lmite en que R 0, , es decir, la
corriente no decae sino que se conserva en el nivel inicial I
0
; este sera el caso
para un inductor construdo con alambre superconductor y puesto en corto
circuito.
Observe que el termino e
(R/L) t
aparece en los dos casos anteriores. Se
puede pensar que este es la huella digital de la conguracion, el compor-
tamiento que la caracteriza. Conocer este comportamiento, para este y otros
circuitos comunes, permite tener una idea de la evolucion de la respuesta en
otras situaciones, a un antes de solucionar las ecuaciones.
1.3. ECUACIONES HOMOG
ENEAS DE PRIMER ORDEN 9
i i
+
-
v
R
R C
C
Figura 1.4: Circuito RC.
1.3.4 Circuito RC
El mismo tipo de respuesta exponencial aparece en circuitos RC. Para el
circuito de la Figura 1.4, la solucion en terminos de voltajes es:
i
R
+ i
C
= 0 (1.21)
dv
dt
+
1
RC
v = 0 (1.22)
v = V
0
e
t
RC
. (1.23)
En terminos de corrientes, la solucion es:
R i
C
+
1
C
i
C
dt = 0 (1.24)
di
dt
+
1
RC
i = 0 (1.25)
i = I
0
e
t
RC
, (1.26)
donde la condicion inicial I
0
esta relacionada con el voltaje inicial de acuerdo
con
I
0
=
V
0
R
. (1.27)
La constante de tiempo es = RC. Tanto la respuesta de voltaje como la
de corriente presentan la caracterstica exponencial con identica constante de
tiempo. Ahora un aumento en la resistencia da lugar a una evolucion mas
lenta (aumenta la constante de tiempo), el mismo efecto que tiene aumentar
la capacitancia.
10 CAP
ITULO 1. M
ETODOS DE SOLUCI
ON
+
Vs
R
L
i
Figura 1.5: Circuito RL con fuente.
1.4 Ecuaciones no homogeneas de primer or-
den
Cuando existe una fuente independiente en el circuito, la ecuacion diferencial
tiene un termino que depende solamente del tiempo. Por ejemplo, para el
circuito de la Figura 1.5:
v
s
= Ri + L
di
dt
. (1.28)
Reordenando terminos:
di
dt
+
R
L
i =
v
s
L
. (1.29)
1.4.1 Metodo del factor integrante
La ecuacion resultante es no homogenea y puede resolverse multiplicando por
un factor integrante, en este caso e
R
L
t
:
e
R
L
t
di
dt
+
R
L
e
R
L
t
i = e
R
L
t
v
s
L
. (1.30)
Se puede apreciar que el lado izquierdo de la ultima ecuacion es la derivada
de un producto:
d
dt
e
R
L
t
i
= e
R
L
t
v
s
L
. (1.31)
Integrando en ambos lados:
e
R
L
t
i =
t
0
e
R
L
t
v
s
L
dt + k, (1.32)
1.4. ECUACIONES NO HOMOG
ENEAS DE PRIMER ORDEN 11
0 1 2 3 4 5 6 7
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Figura 1.6: Corriente en el circuito RL con fuente.
i = e
R
L
t
t
0
e
R
L
t
v
s
L
dt + ke
R
L
t
. (1.33)
Una vez especicada la funcion v
s
(t), se puede integrar esta ultima expresion.
Por ejemplo, para v
s
= V
s
(fuente de voltaje constante). se tiene:
i =
V
s
L
e
R
L
t
t
0
e
R
L
t
dt + ke
R
L
t
, (1.34)
i =
V
s
L
e
R
L
t
L
R
e
R
L
t
t
0
+ ke
R
L
t
, (1.35)
i =
V
s
R
1 e
R
L
t
+ ke
R
L
t
. (1.36)
La constante k se eval ua sustituyendo la condicion inicial i(0) = I
0
. Con
I
0
= 0, la solucion particular es:
i(t) =
V
s
R
1 e
R
L
t
. (1.37)
La solucion se muestra en la Figura 1.6. Nuevamente, la componente ex-
ponencial con constante de tiempo = L/R juega un papel primordial en
la forma de la respuesta, tanto as que esta puede considerarse propia de la
conguracion del circuito.
12 CAP
ITULO 1. M
ETODOS DE SOLUCI
ON
1.4.2 Metodo de separacion de variables
La ecuacion (1.29) tambien puede resolverse usando el metodo de separacion
de variables cuando v
s
= V
s
(constante). Re-escribiendo (1.29) se tiene
L
di
dt
= V
s
Ri, (1.38)
di
V
s
Ri
=
dt
L
. (1.39)
Integrando:
ln(V
s
Ri) =
R
L
t + k, (1.40)
V
s
Ri = ke
R
L
t
. (1.41)
Despejando i:
i =
V
s
R
ke
R
L
t
. (1.42)
Si i(0) = 0, entonces:
i =
V
s
R
1 e
R
L
t
, (1.43)
que es (1.37). La solucion por el metodo de separacion de variables es mas
simple en este caso, pero es menos general que la solucion usando el metodo
del factor integrante. Por ejemplo, si la fuente es variante en el tiempo, el
metodo de separacion de variables no se puede aplicar.
1.5 Ecuaciones homogeneas de segundo or-
den
Cuando existen dos elementos almacenadores de energa en el circuito, la
ecuacion diferencial resultante es de segundo orden, es decir aparece una se-
gunda derivada, o bien se tienen dos ecuaciones diferenciales de primer orden
acopladas. Por lo mismo, es necesario especicar dos condiciones iniciales.
La solucion general contendr a dos constantes por determinar.
1.5. ECUACIONES HOMOG
ENEAS DE SEGUNDO ORDEN 13
1.5.1 Circuito sin amortiguamiento
Considere el circuito LC de la Figura 1.7. Usando la ley de corrientes de
Kirchho:
C
dv
dt
+
1
L
vdt = 0. (1.44)
Derivando y dividiendo por C:
d
2
v
dt
2
+
1
LC
v = 0. (1.45)
Si se usa la ley de voltajes de Kirchho, la ecuacion que se obtiene es:
d
2
i
dt
2
+
1
LC
i = 0, (1.46)
donde i es la corriente de referencia en el inductor.
Esta ecuacion es de la
misma forma que (1.45), y por lo tanto tiene la misma solucion general. En
el caso de la ecuacion de voltaje (1.45), la solucion se puede escribir como
v = k
1
e
+j
0
t
+ k
2
e
j
0
t
, (1.47)
donde
0
= 1/
LC. Haciendo uso de la identidad de Euler
e
j
= cos jsen, (1.48)
se llega a
v = k
1
cos
0
t + k
2
sen
0
t = k
1
cos (
0
t + k
2
) , (1.49)
donde las constantes k
1
, k
2
dependen de las condiciones iniciales. Dado que la
ecuacion diferencial es de segundo orden, las condiciones iniciales requeridas
son v(0) y v
(0), es decir, el voltaje inicial y su derivada. Sin embargo, es
mas factible que se especiquen las condiciones iniciales v(0) e i(0). El valor
de la derivada inicial del voltaje v
(0) puede determinarse recordando que
i
C
= C
d
dt
(v
C
), (1.50)
de donde
v
(0) =
1
C
i
C
(0) =
1
C
i(0) (1.51)
puesto que la corriente de referencia en el capacitor tiene sentido opuesto
a la de referencia en nuestra ecuacion (la de la inductancia). La respuesta
14 CAP
ITULO 1. M
ETODOS DE SOLUCI
ON
dada por (1.49) es una forma de onda senoidal con frecuencia
0
, sin amor-
tiguamiento (es decir, con amplitud maxima constante). Observe la natu-
raleza fundamentalmente distinta de la respuesta de este circuito LC respecto
a los circuitos de primer orden RL y RC considerados anteriormente. La os-
cilacion es el resultado de que la energa se almacena y libera alternadamente
entre el capacitor y el inductor (en forma de campo electrico y magnetico
respectivamente).
La solucion particular para el caso v(0) = V
0
, i(0) = 0 (equivalentemente
v
(0) = 0) se determina evaluando las constantes k
1
, k
2
. Sustituyendo la
primera condicion inicial:
V
0
= k
1
cos(k
2
). (1.52)
Derivando la solucion (1.49) y sustituyendo la segunda condicion inicial:
0 = k
1
sen(k
2
). (1.53)
Despejando k
2
de (1.52) y sustituyendo en (1.53):
0 =
0
V
0
senk
2
cosk
2
=
0
V
0
tank
2
, (1.54)
tank
2
= 0, (1.55)
k
2
= 0 k
1
= V
0
, (1.56)
y la solucion particular es
v = V
0
cos
0
t. (1.57)
La corriente se puede obtener facilmente a partir de (1.50), quedando
i =
0
CV
0
sen
0
t. (1.58)
En la Figura 1.8 se muestran el voltaje y la corriente para este circuito. Se
puede ver que el voltaje es maximo cuando la corriente es cero, y que la
corriente es maxima cuando el voltaje es cero. Fsicamente, toda la energa
del sistema esta almacenada en el capacitor cuando i = 0 y toda en el inductor
cuando v = 0.
La frecuencia de la oscilacion es
0
= 1/
LC. Un aumento en la induc-
tancia y/o en la capacitancia conlleva una disminuci on en la frecuencia de
oscilacion. Por el contrario, una disminuci on del producto LC implica un
aumento en la frecuencia de oscilacion.
1.5. ECUACIONES HOMOG
ENEAS DE SEGUNDO ORDEN 15
i i
+
-
v
L
L
C
C
i
Figura 1.7: Circuito LC autonomo.
0 1 2 3 4 5 6 7 8 9 10
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
Tiempo (s)
Voltaje
Corriente
Figura 1.8: Voltaje y corriente en el circuito LC autonomo.
16 CAP
ITULO 1. M
ETODOS DE SOLUCI
ON
1.5.2 Circuito con amortiguamiento
Si se introduce una resistencia en el circuito, se tiene entonces la conguracion
de la Figura 1.9, donde la ecuacion en terminos de la corriente se obtiene luego
de aplicar la ley de voltajes de Kirchho:
Ri + L
di
dt
+
1
C
i dt, (1.59)
que despues de derivar y dividir por L queda:
d
2
i
dt
2
+
R
L
di
dt
+
1
LC
i = 0. (1.60)
La ecuacion caracterstica es
s
2
+
R
L
s +
1
LC
= 0, (1.61)
y la solucion general de la ecuacion diferencial se puede escribir como
i = k
1
e
s
1
t
+ k
2
e
s
2
t
, (1.62)
donde
s
1,2
=
R
L
R
L
4
LC
2
. (1.63)
La naturalez especca de esta funcion depende de si las races son reales o
complejas. Para el caso en que el termino dentro del signo de la raz es mayor,
igual o menor que cero, se tiene un sistema sobreamortiguado, crticamente
amortiguado o subamortiguado (oscilatorio), respectivamente. La oscilacion,
sin embargo, decae con el tiempo debido a la presencia del resitor R. Las
respuestas posibles se ilustran en las Figuras 1.10 a 1.12, para condiciones
iniciales i(0) = 0, v
c
(0) = 1 (o, equivalentemente, di/dt = 1/L) y los
parametros en cada caso dados por:
Caso subamortiguado:
R = 1, L = 1, C = 1.
Caso crticamente amortiguado:
R = 2, L = 1, C = 1.
Caso sobreamortiguado:
R = 4, L = 1, C = 1.
1.5. ECUACIONES HOMOG
ENEAS DE SEGUNDO ORDEN 17
L C
i R
Figura 1.9: Circuito RLC autonomo.
0 1 2 3 4 5 6 7 8 9 10
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
Tiempo (s)
V
a
r
i
a
b
l
e
s
d
e
e
s
t
a
d
o
Vc
IL
Figura 1.10: Respuestas del circuito RLC autonomo (caso subamortiguado).
18 CAP
ITULO 1. M
ETODOS DE SOLUCI
ON
0 1 2 3 4 5 6 7 8 9 10
0.4
0.2
0
0.2
0.4
0.6
0.8
1
Tiempo (s)
V
a
r
i
a
b
l
e
s
d
e
e
s
t
a
d
o
Vc
IL
Figura 1.11: Respuestas del circuito RLC autonomo (caso crticamente amor-
tiguado).
0 1 2 3 4 5 6 7 8 9 10
0.4
0.2
0
0.2
0.4
0.6
0.8
1
Tiempo (s)
V
a
r
i
a
b
l
e
s
d
e
e
s
t
a
d
o
Vc
IL
Figura 1.12: Respuestas del circuito RLC autonomo (caso sobreamor-
tiguado).
1.6. ECUACIONES NO HOMOG
ENEAS DE SEGUNDO ORDEN 19
1.6 Ecuaciones no homogeneas de segundo or-
den
Para el circuito mostrado en la Figura 1.13, si la variable de interes es la
corriente, la ecuacion a resolver es
v
s
= L
di
dt
+
1
C
idt, (1.64)
o bien
v
s
= LC
d
2
v
c
dt
2
+ v
c
, (1.65)
si el voltaje en el capacitor es de interes.
Esta ultima es una ecuacion difer-
encial no homogenea de segundo orden. Su solucion consta de dos partes:
la solucion de la ecuacion homogenea correspondiente, y la solucion comple-
mentaria, cuya forma depende de la funcion independiente en la ecuacion.
Si v
s
= V
s
(constante), la solucion que se propone es v
c
= V , y la solucion
completa es de la forma:
v
c
= k
1
cos(
0
t + k
2
) + V (1.66)
(la solucion de la ecuacion homogenea se haba obtenido anteriormente).
Sustituyendo la solucion completa en la ecuacion diferencial:
k
1
2
0
cos(
0
t + k
2
) +
k
1
LC
cos(
0
t + k
2
) +
V
LC
=
V
s
LC
(1.67)
Igualando los coecientes de los terminos constantes:
V = V
s
. (1.68)
Para las condiciones iniciales v
c
(0) = V
0
y v
c
(0) = 0 (esta ultima equivalente
a i(0) = 0):
v
c
(0) = k
1
cos(k
2
) + V
s
= V
0
, (1.69)
v
(
0) = k
2
0
sen(k
2
) = 0, (1.70)
de donde
k
2
= 0, (1.71)
k
1
= V
0
V
s
. (1.72)
20 CAP
ITULO 1. M
ETODOS DE SOLUCI
ON
+
Vs C
L
Figura 1.13: Circuito LC con fuente.
0 1 2 3 4 5 6 7 8 9 10
1
0.5
0
0.5
1
1.5
2
2.5
3
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Vo=+1
Vo=+2
Vo= 1
Figura 1.14: Voltaje en el capacitor en el circuito LC con fuente.
La solucion particular es entonces
v
c
= (V
0
V
s
)cos
0
t + V s. (1.73)
Esta solucion se ha gracado para varios valores de V
0
en la Figura 1.14.
Observe que los parametros L y C del circuito determinan la frecuencia de
la oscilacion, pero la magnitud maxima del voltaje depende de la diferencia
entre el voltaje aplicado y el voltaje remanente en el capacitor.
Si el voltaje de la fuente coincide con el voltaje remanente en el capacitor,
el termino oscilatorio desaparece. En un circuito real, debe haber cierta
resistencia, de modo que la oscilacion se ira amortiguando gradualmente
hasta que v
c
alcance el valor de voltaje de la fuente.
1.7. TRANSFORMACI
ON DE LAPLACE 21
1.7 Transformaci on de Laplace
Los metodos de solucion de las secciones anteriores son directos, es decir, se
trabaja directamente con la ecuacion. Existe una alternativa consistente en
transformar la ecuacion de manera que su solucion resulte mas sencilla. La
transformacion de Laplace es la mas com un de las transformaciones aplicadas
a ecuaciones diferenciales; su atractivo es que la ecuacion se transforma a
algebraica, a partir de la cual es posible obtener facilmente la variable de
interes despues de aplicar la transformacion inversa.
La transformacion de Laplace se dene por
F(s) = lim
0
f(t)e
st
dt, (1.74)
es decir, la funcion en el tiempo f(t) se transforma a la funcion en el dominio
de la frecuencia F(s):
f(t) F(s). (1.75)
Existen textos donde se pueden encontrar las transformaciones para las fun-
ciones mas comunes, as como sus inversas; algunas de ellas se presentan en
la tabla 1.2.
Un ejemplo ayudar a a recordar el procedimiento a seguir. Para el circuito
LC con fuente, si la variable de interes es la corriente, se llega a la ecuacion
(1.64). Transformando:
sLI Li(0) +
I
sC
+
1
sC
i()d =
V
s
s
. (1.76)
Se puede ver que la integral en esta expresion representa el voltaje inicial en
el capacitor:
1
C
i()d =
q(0)
C
= v
c
(0). (1.77)
Las condiciones iniciales requeridas son entonces i(0) y v
c
(0). Observe que
el metodo de transformacion incorpora las condiciones iniciales de manera
natural. Despejando I(s):
I =
CV
s
+ sLCi
0
v
0
s
2
LC + 1
. (1.78)
Si i
0
= i(0) = 0 y v
0
= v(0) = 0, la corriente transformada queda
I =
CV
s
s
2
LC + 1
=
V
s
L
s
2
+
1
LC
, (1.79)
22 CAP
ITULO 1. M
ETODOS DE SOLUCI
ON
Tabla 1.2: Transformaci on de Laplace de algunas funciones.
f = k F =
k
s
f = kt F =
k
s
2
f = e
at
F =
1
sa
f = sent F =
s
2
+
2
f = cost F =
s
s
2
+
2
f =
dg
dt
F = sGg(0)
f =
t
g()d F =
G
s
+
1
s
g()d
y recordando que se haba denido
0
= 1/
LC se tiene
I =
C
L
V
s
0
s
2
+
2
0
. (1.80)
Efectuando la transformacion inversa:
i(t) =
C
L
V
s
sen
0
t. (1.81)
Este ejemplo ilustra el hecho de que el metodo de transformacion es aplicable
tanto a ecuaciones diferenciales como integrales e integro-diferenciales.
Para el mismo circuito, si la variable de interes es el voltaje en el capacitor,
la ecuacion (1.65) resulta. En terminos de
0
, la ecuacion es
d
2
v
c
dt
2
+
2
0
v
c
=
2
0
V
s
, (1.82)
la cual, una vez transformada lleva a
(s
2
+
2
0
)V
c
=
2
0
V
s
s
+ sv
c
(0) + v
c
(0). (1.83)
1.7. TRANSFORMACI
ON DE LAPLACE 23
Para v
c
(0) = V
0
y v
c
(0) = 0:
V
c
=
2
0
V
s
s(s
2
+
2
0
)
+
sV
0
s
2
+
2
0
. (1.84)
La inversa del segundo termino en el lado derecho es cos
0
t. Para invertir
el primer termino del lado derecho, se usa la descomposicion en fracciones
parciales siguiente:
2
0
s(s
2
+
2
0
)
=
1
s
s
s
2
+
2
0
. (1.85)
De este modo,
v
c
(t) = V
s
(V
s
V
0
)cos
0
t, (1.86)
que es la solucion que se haba obtenido anteriormente.
24 CAP
ITULO 1. M
ETODOS DE SOLUCI
ON
Captulo 2
Metodos de simulacion
Los metodos de solucion que han sido presentados se aplican a circuitos
simples. Cuando se tienen redes extensas, la solucion exacta es impractica;
mas a un, si existen componentes no lineales, por lo general no es posible
encontrar la solucion. Sin embargo, s es posible recurrir a la simulaci on
numerica del circuito y a partir de ella extraer informacion pertinente.
Existen varias maneras de simular el comportamiento de un circuito.
Si las ecuaciones del sistema se escriben de forma que las derivadas sean
explcitas (es decir mediante una ecuacion de estado), entonces se puede
usar un programa de solucion de EDOs (ecuaciones diferenciales ordinarias)
com un, por ejemplo uno basado en las formulas de Runge-Kutta, Adams-
Moulton, etc. Si no es posible escribir las ecuaciones de estado, puede in-
tentarse escribir un sistema de ecuaciones diferencial-algebraicas (EDAs) y
usar alg un programa especco basado, por ejemplo, en las formulas de difer-
enciacion regresiva (BDF por sus siglas en ingles) o el metodo implcito de
Runge-Kutta. Ambos enfoques se discuten en el presente captulo.
Otra posibilidad, comunmente usada en la practica para estudios a gran
escala, consiste en recurrir a un paquete computacional especializado que dis-
cretiza los elementos de circuito antes de ensamblar el sistema de ecuaciones;
como resultado, se resuelve una red resistiva equivalente. La implementaci on
de este enfoque de circuitos asociados en computadora ha resultado en la
disponibilidad de varios programas especializados, tales como EMTP, SPICE,
etc. Matematicamente, este enfoque es equivalente al de solucion de EDAs,
pero el uso real de uno y otro diere notablemente en los detalles.
Los metodos de simulacion apuntados se discuten a continuaci on. Cada
uno tiene ventajas y desventajas y la eleccion de uno de ellos depende de la
25
26 CAP
ITULO 2. M
ETODOS DE SIMULACI
ON
naturaleza del problema. Por ejemplo, para problemas peque nos o para una
exploracion inicial del problema, la primera opcion es intentar una solucion
analtica. Si esto no es posible o se vuelve innecesariamente complicado,
es posible plantear el enfoque de ecuaciones de estado. Muchos problemas
practicos pueden resolverse mediante este enfoque. Por ultimo, para proble-
mas a gran escala se requiere utilizar un programa especializado de simulacion
de transitorios en sistemas de potencia. Esta opcion, sin embargo, tiene el
costo que implica aprender el manejo de tal programa, que a menudo puede
resultar complejo. Para problemas peque nos, tal costo puede no estar justi-
cado y es por ello que en este captulo se presentan ambas alternativas de
simulacion de transitorios.
Es necesario hacer notar que los metodos que se presentan en este captulo
no son los unicos que se pueden emplear. Se han propuesto un gran n umero de
tecnicas de analisis y solucion que no mencionaremos. Un ejemplo notable es
el analisis en el dominio complejo o analisis en la frecuencia, que contrasta con
los metodos de analisis en el dominio del tiempo que se discuten enseguida.
2.1 Ecuaciones de estado
Varios metodos para aproximar la solucion de la ecuacion de estado general
x = f (x) (2.1)
han sido implementados en rutinas de computadora. Se trata de solucionar
un sistema de ecuaciones diferenciales ordinarias (EDOs), para lo cual se
cuenta con varios metodos bien conocidos; el metodo explcito de Runge-
Kutta es uno de ellos.
Muchas de las rutinas implementadas estan disponibles p ublicamente, in-
cluyendo su codigo fuente, en depositos de rutinas cientcas, o han sido incor-
poradas en entornos de calculo numerico de uso general. Las mas avanzadas
incorporan previsiones para variar el paso de integraci on automaticamente,
cumpliendo con una cota de error. En resumen, la alta disponibilidad y
conabilidad de estas rutinas las hacen una alternativa atractiva en la simu-
lacion de sistemas dinamicos en general, y de transitorios en redes electricas
en nuestro caso. En particular, su uso es ventajoso dado que no se requiere
pasar por el proceso de aprendizaje de otras herramientas de simulaci on mas
especializadas.
2.1. ECUACIONES DE ESTADO 27
En esta seccion se discuten dos metodos para la determinacion de las
ecuaciones de estado: uno basado en conceptos de topologa de redes y otro
basado en el analisis nodal modicado. Posteriormente se ilustra el pro-
cedimiento de simulaci on y se discuten algunos casos especiales, incluyendo
componentes no lineales y transformadores.
2.1.1 Conceptos de topologa de redes
Antes de presentar la metodologa para la sntesis de las ecuaciones de estado,
conviene repasar algunos conceptos de topologa de redes [2]. Partiendo de
los conceptos de nodo y rama, que se asumen conocidos por el lector, se
denen:
Graco. El conjunto de nodos N y de ramas R tales que cada rama
incide en dos nodos:
G = (N, R). (2.2)
Subgraco. Si N
1
N y R
1
R, entonces si G
1
= (N
1
, R
1
) es a su
vez un graco, se le llama subgraco de G.
Lazo. Dado un graco conectado G, un lazo L se dene como un
subgraco conectado de G tal que exactamente dos ramas inciden en
cada nodo.
Arbol. Un arbol de un graco conectado G es un subgraco que es a su
vez conectado, contiene todos los nodos de G y no contiene lazos. Las
ramas que no pertenecen al arbol se llaman cuerdas.
Conjunto de corte. Dado un graco conectado G, un conjunto de ramas
C R forma un conjunto de corte si la remocion de todas las ramas
de C deja un graco desconectado, y la remocion de todas excepto una
rama de C deja un graco conectado.
Con estas deniciones, citamos el Teorema Fundamental de Gracos:
Dado un graco conectado G con n nodos y r ramas, y un arbol
A de G,
1. Existe una trayectoria unica a traves del arbol entre cua-
lesquiera dos nodos.
28 CAP
ITULO 2. M
ETODOS DE SIMULACI
ON
2. Existen n 1 ramas en el arbol y r (n 1) cuerdas.
3. Cada rama del arbol junto con algunas cuerdas dene un
conjunto de corte, llamado el conjunto de corte fundamental
asociado con esa rama del arbol.
4. Cada cuerda y la trayectoria unica en el arbol entre sus dos
nodos constituyen un lazo unico, llamado lazo fundamental
asociado con esa cuerda.
2.1.2 Determinacion directa de las ecuaciones
El proceso a seguir puede ilustrarse con el ejemplo de la Figura 2.1. El
metodo que se describe a continuaci on para escribir las ecuaciones de estado
funciona para muchas redes de interes:
1. Seleccionar un arbol a partir del graco del circuito, que incluya a todos
los capacitores y ning un inductor. Note que si un circuito tiene un lazo
de capacitores o un conjunto de corte de inductores, entonces no se
puede encontrar un arbol apropiado y el metodo falla. Para nuestro
ejemplo, seleccionamos el arbol mostrado en la Figura 2.2.
2. Se seleccionan como variables de estado los voltajes en los capacitores
y las corrientes en los inductores. En nuestro caso, las variables de
estado son v
1
, v
2
, i
L
.
3. Para cada conjunto de corte fundamental denido por un capacitor,
escribir una ecuacion a partir de la ley de corrientes de Kirchho, en
terminos de las otras variables de estado y de las variables de entrada
(fuentes independientes). Para el ejemplo presentado, los conjuntos de
corte denidos por los capacitores se muestran en la Figura 2.2, y las
ecuaciones son:
v
1
v
s
R
1
+ C
1
dv
1
dt
+ i
L
= 0, (2.3)
i
L
+ C
2
dv
2
dt
+
v
2
R
2
= 0. (2.4)
4. Para cada lazo fundamental denido por un inductor, escribir una
ecuacion a partir de la ley de voltajes de Kirchho. En el caso pre-
sente, la ecuacion resultante es:
v
1
+ L
di
L
dt
+ v
2
= 0. (2.5)
2.1. ECUACIONES DE ESTADO 29
+
R1 L
R2 C2 C1 Vs
Figura 2.1: Circuito de ejemplo.
I
II
Figura 2.2:
Arbol para circuito de ejemplo y conjuntos de corte asociados
con los capacitores.
Las derivadas se pueden poner de manera explcita:
dv
1
dt
=
v
1
C
1
R
1
i
L
C
1
+
v
s
C
1
R
1
, (2.6)
dv
2
dt
=
v
2
C
2
R
2
+
i
L
C
2
, (2.7)
di
L
dt
=
v
1
L
v
2
L
. (2.8)
Estas son las ecuaciones de estado para el circuito de ejemplo. Para este caso
lineal, las ecuaciones anteriores se pueden poner en forma matricial:
dv
1
dt
dv
2
dt
di
L
dt
1
C
1
R
1
0
1
C
1
0
1
C
2
R
2
1
C
2
1
L
1
L
0
v
1
v
2
i
L
1
C
1
R
1
0
0
v
s
. (2.9)
30 CAP
ITULO 2. M
ETODOS DE SIMULACI
ON
2.1.3 Analisis nodal modicado
Un metodo ligeramente diferente de plantear las ecuaciones de estado surge
empleando el metodo de analisis nodal convencional. En el, se escribe una
ecuacion de equilibrio de corriente para cada nodo, y los voltajes de nodo a
tierra son las incognitas del problema. Para ramas capacitivas, la corriente
es proporcional a la derivada del voltaje, de modo que esa rama contribuye
un termino derivativo a la ecuacion. Si embargo, en inductores la corriente
es la integral del voltaje, por lo que se requiere realizar una derivacion de
la ecuacion para ese nodo de manera que se elimine la integral. Si hay
capacitancias conectadas a ese nodo, esto resulta en segundas derivadas, las
cuales hay que transformar nuevamente a primeras derivadas introduciendo
una variable adicional y una segunda ecuacion.
En el analisis nodal modicado, la corriente en el inductor no se pone
en terminos de los voltajes, sino que se conserva como variable de estado y
se agrega la ecuacion diferencial que describe a la inductancia. Entonces, se
tiene un termino diferencial por cada capacitor y uno por cada inductor, al
igual que cuando se recurre al metodo de arbol para plantear las ecuaciones.
Sin embargo, en el caso del analisis nodal modicado puede requerirse mas
manipulacion algebraica para poner las ecuaciones en forma adecuada. Por
ejemplo, si existen dos capacitores conectados a un nodo, la ecuacion de cor-
rientes para ese nodo contendra dos derivadas y se requiere eliminar una de
ellas para que las ecuaciones queden de la forma requerida (o bien puede
utilizarse el procedimiento descrito mas adelante en la seccion de transfor-
madores).
2.1.4 Simulacion
Las ecuaciones del sistema son usadas como datos de entrada a un programa
de solucion de EDOs; con nes ilustrativos la discusion siguiente asume que
se emplearan los solucionadores incluidos en el entorno de calculo Matlab.
Puesto que los parametros y las condiciones iniciales deben tener un valor
especco, cada solucion es particular a esos valores y es mas difcil discernir
la naturaleza de la respuesta y el efecto de los parametros. Por otra parte,
dado que los equipos de computo cada vez son mas poderosos, la solucion de
un caso particular toma solo unos pocos minutos o segundos.
Para el caso de ejemplo, deben de asignarse valores numericos a los
parametros R
1
, R
2
, C
1
, C
2
, L, y especicar la fuente v
s
y las condiciones
2.1. ECUACIONES DE ESTADO 31
iniciales v
1
(0), v
2
(0), i
L
(0). Considere el caso en el que las condiciones ini-
ciales son cero y se aplica una fuente de voltaje constante en t = 0, con los
parametros dados por:
v
s
= 100V,
R
1
= R
2
= 1,
L = 1mH,
C
1
= C
2
= 5F.
El codigo siguiente se puede almacenar en un archivo de texto, bajo el nom-
bre ejemplo.m, y usarse como entrada para simular el circuito usando los
solucionadores de EDOs de Matlab:
function dotx = ejemplo(t,x)
% Funcion de estado para circuito de ejemplo.
% Parametros:
Vs = 100;
R1 = 1;
R2 = 1;
C1 = 5e-6;
C2 = 5e-6;
L = 1e-3;
dotx = zeros(3,1);
dotx(1) = -x(1)/(C1*R1) - x(3)/C1 + Vs/(C1*R1);
dotx(2) = -x(2)/(C2*R2) + x(3)/C2;
dotx(3) = x(1)/L - x(2)/L;
Asumiendo que el archivo esta en alguno de los directorios de la ruta de
Matlab, la simulacion se inicia con el comando
>> [t,x] = ode113(ejemplo,[0,0.005],[0 0 0]);
Este comando se interpreta as: llamar la rutina de solucion ode113, con la
funcion de estado ejemplo.m como argumento; simular de t = 0 a t = 0.005
segundos, con condiciones iniciales cero y almacenando el resultado en las
variables t, x.
Podemos desplegar gracamente la solucion con el comando
32 CAP
ITULO 2. M
ETODOS DE SIMULACI
ON
>> plot(t,x)
(despliega todas las variables de estado), o con
>> plot(t,x(:,1))
(despliega la primera variable de estado).
La Figura 2.3 muestra la respuesta del circuito. v
2
e i
L
se comportan como
en un circuito LC sobreamortiguado. En cambio, v
1
exhibe una respuesta
que no se haba observado: crece exponencialmente con una constante de
tiempo peque na y decrece exponencialmente con una constante de tiempo
mayor. Se alcanzo el valor de estado estable en alrededor de 3.3ms (no se
muestra todo el periodo transitorio). El solucionador requirio de 685 pasos
(de longitud variable) para completar la simulacion.
A partir de la experiencia previa podemos suponer que la naturaleza de
la respuesta se modica al cambiar el valor de las resistencias. Por ejemplo,
si R
2
se aumenta, C
2
intercambiar a mas energa con la porcion LC serie, por
lo que la respuesta probablemente sea oscilatoria. Con R
2
= 10, se puede
observar que las tres variables de estado oscilan alrededor de su valor de
estado estable, el cual alcanzan rapidamente (0.6ms), Figura 2.4.
Con R
2
= 100, la oscilacion es mas evidente. v
1
se carga rapidamente a
un voltaje cercano al de la fuente (con peque nas oscilaciones). Sin embargo,
v
2
alcanza un valor pico de aproximadamente 170V, que es 70% mas que su
valor nal. El transitorio dura aproximadamente 3ms; el periodo inicial se
muestra en la Figura 2.5.
2.1.5 Componentes no lineales
El metodo de simulaci on usando variables de estado puede ser aplicado in-
cluso cuando se tengan elementos no lineales. La discusion se centra en el
caso de inductores no lineales, porque tales componentes se presentan co-
munmente.
Funci on de ujo enlazado
Suponga que se tiene un inductor no lineal descrito por la funcion
= (i). (2.10)
2.1. ECUACIONES DE ESTADO 33
0 0.2 0.4 0.6 0.8 1
x 10
3
0
10
20
30
40
50
60
70
80
90
100
Tiempo (s)
V
a
r
i
a
b
l
e
s
d
e
e
s
t
a
d
o
V1
V2
IL
Figura 2.3: Variables de estado del caso de ejemplo, R
2
= 1.
0 0.2 0.4 0.6 0.8 1
x 10
3
0
10
20
30
40
50
60
70
80
90
100
Tiempo (s)
V
a
r
i
a
b
l
e
s
d
e
e
s
t
a
d
o
V1
V2
IL
Figura 2.4: Variables de estado del caso de ejemplo, R
2
= 10.
34 CAP
ITULO 2. M
ETODOS DE SIMULACI
ON
0 0.2 0.4 0.6 0.8 1
x 10
3
20
0
20
40
60
80
100
120
140
160
180
Tiempo (s)
V
a
r
i
a
b
l
e
s
d
e
e
s
t
a
d
o
V1
V2
IL
Figura 2.5: Variables de estado del caso de ejemplo, R
2
= 100.
Dado que el voltaje en el inductor esta denido por la ley de Faraday
v
L
=
d
dt
, (2.11)
se tiene que
v
L
=
d
di
di
dt
. (2.12)
En el circuito de ejemplo, la ecuacion en el lazo del inductor se modica para
quedar:
v
1
+
d
di
di
dt
+ v
2
= 0, (2.13)
y la ecuacion de estado queda
di
dt
=
1
d
di
(v
1
v
2
) . (2.14)
Como ejemplo, considere el circuito de la Figura 2.6, que representa la
energizacion de un inductor no lineal a traves de una fuente senoidal con una
resistencia dada. Los parametros de este circuito son v
s
= 5 cos(t), R = 1,
y un inductor cuyo ujo enlazado es una funcion de la corriente dada por
= tanh(i).
En la Figura 2.7 se muestra la graca del ujo enlazado como funcion
de la corriente para este caso. Hay que recordar que esta es una funcion
2.1. ECUACIONES DE ESTADO 35
Vs
R
L
i
Figura 2.6: Circuito RL con fuente, con inductor no lineal.
idealizada; sin embargo, se puede usar para aproximar un inductor real si se
agregan las constantes adecuadas. La funcion de estado en lenguaje Matlab
es la siguiente:
function dotx = circuito_vrl_nl(t,x)
% Funcion de estado para circuito RL con fuente,
% inductancia no lineal.
% Parametros:
Vs = 5*cos(t);
R = 1;
D = ( sech(x) )^2;
dotx = zeros(1,1);
dotx(1) = ( Vs - R*x(1) ) / D;
La respuesta de corriente del circuito descrito se presenta en la Figura
2.8. La tpica forma de onda de corriente de magnetizacion es observable.
Este ejemplo muestra un caso relativamente sencillo de plantear, que sin
embargo no es trivial de resolver analticamente. Es en estos casos en los que
es ventajoso contar con una herramienta de simulaci on.
36 CAP
ITULO 2. M
ETODOS DE SIMULACI
ON
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Corriente (A)
E
n
c
a
d
e
n
a
m
i
e
n
t
o
d
e
f
l
u
j
o
(
V
s
)
Figura 2.7: Encadenamiento de ujo = tanh(i).
0 5 10 15
6
4
2
0
2
4
6
Tiempo (s)
C
o
r
r
i
e
n
t
e
(
A
)
Figura 2.8: Respuesta de corriente del circuito RL con fuente, con inductor
no lineal.
2.1. ECUACIONES DE ESTADO 37
Funci on de inductancia
Otra posibilidad es que se conozca la funcion de inductancia no lineal L(i).
En este caso, el voltaje en el inductor esta dado por:
v
L
=
d
dt
(Li) = L
di
dt
+ i
dL
dt
= L
di
dt
+ i
dL
di
di
dt
=
L + i
dL
di
di
dt
, (2.15)
y la ecuacion de estado de nuestro primer ejemplo queda:
di
dt
=
1
L + i
dL
di
(v
1
v
2
) . (2.16)
2.1.6 Transformadores
Un caso importante para el que es difcil escribir explcitamente las ecuaciones
de estado es cuando se tienen transformadores. Para un transformador de
dos devanados, se pueden escribir las ecuaciones de voltaje como sigue:
v
1
= R
1
i
1
+ L
1
di
1
dt
+ L
11
di
1
dt
+ L
12
di
2
dt
, (2.17)
v
2
= R
2
i
2
+ L
2
di
2
dt
+ L
21
di
1
dt
+ L
22
di
2
dt
, (2.18)
donde R
1
es la resistencia del devanado primario, L
1
su inductancia de dis-
persion, L
11
su inductancia propia, con terminos similares para el devanado
secundario.L
12
es la inductancia mutua entre devanados. Puesto que ambas
derivadas de corriente aparecen en una misma expresion, la ecuacion de es-
tado no puede escribirse directamente y no es posible usar solucionadores de
EDOs. Por otra parte, las ecuaciones son de la forma
f ( x, x, t) = 0, (2.19)
por lo que es posible, en principio, usar un solucionador general de EDAs, o
bien uno de los simuladores especializados basados en el concepto de circuitos
asociados.
Considere el caso presentado en la Figura 2.9, que representa un trans-
formador conectado a una fuente de voltaje senoidal, con carga CLR en el
secundario. Se considerara que el transformador es no saturable, lo cual es
una primera aproximacion valida si la corriente no excede el valor nominal.
38 CAP
ITULO 2. M
ETODOS DE SIMULACI
ON
El lector puede vericar que, tomando las corrientes primaria y secundaria
del transformador como variables de estado i
1
e i
2
, la corriente en el inductor
de carga como variable de estado i
3
y el voltaje en el capacitor de carga como
variable de estado v
4
, las ecuaciones resultantes son:
(L
1
+ L
11
)
di
1
dt
+ L
12
di
2
dt
= v
s
R
1
i
1
(2.20)
L
21
di
1
dt
+ (L
2
+ L
22
)
di
2
dt
= v
4
R
2
i
2
(2.21)
L
3
di
3
dt
= v
4
(2.22)
C
dv
4
dt
= i
2
i
3
v
4
R
3
(2.23)
La anterior forma una ecuacion de estado implcita, es decir las derivadas no
aparecen libres en el lado izquierdo. Para este caso lineal es posible resolver el
sistema de ecuaciones y obtener el vector de estados en forma explcita, pero
el procedimiento tendra que repetirse para cada paso de integraci on. Una
forma mas conveniente de simular el circuito es utilizando un simulador de
EDAs. Por ejemplo, algunos solucionadores de Matlab permiten especicar
la matriz de masa. La funcion de estado quedara entonces:
function dotx = transformador(t,x)
% Funcion de estado para circuito con transformador: carga CLR.
% Nota: la matriz de "masa" se especifica separadamente.
% Parametros:
Vs = 440*sqrt(2)*cos(2*pi*60*t);
R1 = 0.16;
R2 = 0.08;
R3 = 100;
dotx = zeros(4,1);
dotx(1) = Vs - R1*x(1);
dotx(2) = -R2*x(2) + x(4);
dotx(3) = x(4);
dotx(4) = -x(2) - x(3) - x(4)/R3;
2.2. CIRCUITOS ASOCIADOS 39
% Uso:
% >> B = [ 850e-6+265e-3 -132e-3 0 0; ...
% -132e-3 212e-6+66e-3 0 0; ...
% 0 0 0.1 0; ...
% 0 0 0 1e-3 ];
% >> options = odeset(Mass,B);
% >> [t,x] = ode15s(@transformador, [0 0.1], [0 0 0 0], options);
En el mismo archivo, en forma de comentarios al nal, se encuentran
las instrucciones para simular utilizando derivadas no explcitas. Conviene
aclarar que si la matriz de masa cambia ya sea por ser funcion del tiempo
o de las variables de estado, el procedimiento es distinto; el lector debe con-
sultar la ayuda de Matlab para estos casos.
En la Figura 2.10 se muestran las corrientes primaria y secundaria del
transformador, y el voltaje en la carga se muestra en la Figura 2.11. Observe
como aunque se trata de un circuito lineal, la interacci on de la carga y el
trasformador da origen a una distorsion inicial en la forma de onda de las
corrientes. El voltaje muestra la superposicion de se nales de dos frecuencias,
que de acuerdo a lo expuesto anteriormente son la frecuencia fundamental y
la frecuencia transitoria del circuito LC de la carga. Tambien es de notar la
magnitud de la sobrecorriente de energizacion.
Los resultados obtenidos sirven para ilustrar el procedimiento general, y
no deben tomarse como representativos del fenomeno de energizacion de car-
gas a traves de transformadores. Por ejemplo, la magnitud de las corrientes
implica que en la practica ocurrira cierta saturacion y por lo mismo el modelo
lineal no es totalmente adecuado. Ademas, no se reproduce el fenomeno de
corriente de irrupcion; este fenomeno se discute en una seccion posterior.
2.2 Circuitos asociados
La solucion de redes resistivas por computadora es una tecnologa que ha
llegado a ser muy eciente, lo cual es afortunado entre otras razones porque
la solucion de circuitos dinamicos puede reducirse a la de una red puramente
resistiva para cada paso de tiempo. La manera en que esto es posible es
discretizando localmente, es decir antes de ensamblar, los componentes del
circuito [3].
40 CAP
ITULO 2. M
ETODOS DE SIMULACI
ON
Vs
R1 L1
T1
R2 L2
R3 L3 C
Figura 2.9: Transformador con carga CLR.
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
500
400
300
200
100
0
100
200
300
400
Tiempo (s)
C
o
r
r
i
e
n
t
e
s
(
A
)
I1
I2
Figura 2.10: Corrientes en los devanados del transformador para energizacion
de carga CLR.
2.2. CIRCUITOS ASOCIADOS 41
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
500
400
300
200
100
0
100
200
300
400
500
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Figura 2.11: Voltaje en la carga CLR del transformador.
2.2.1 Circuito asociado de un inductor
Para un inductor lineal, la ecuacion basica del componente considerado de
manera aislada es
v(t) = L
di
dt
, (2.24)
la cual puede integrarse para obtener la corriente:
i(t) =
1
L
t
t
0
v()d + i(t
0
). (2.25)
La clave reside en la discretizacion de esta integral. Aplicando alguna formula
aproximada, por ejemplo la regla trapezoidal, la corriente es:
i(t)
h
2L
[v(t) + v(t
0
)] + i(t
0
), (2.26)
donde h = t t
0
es el paso de integraci on. Re-arreglando esta expresion, se
llega a
i
hv
2L
+
i(t
0
) +
hv(t
0
)
2L
, (2.27)
que, despues de examen cuidadoso, puede verse que corresponde a la red
resistiva mostrada en la Figura 2.12. Aesta red se le llama circuito asociado
de la inductancia.
42 CAP
ITULO 2. M
ETODOS DE SIMULACI
ON
R=2L/h I=i(t0)+hv(t0)/2L
Figura 2.12: Circuito resistivo asociado con un inductor lineal.
2.2.2 Circuito asociado de un capacitor
Para un capacitor, la corriente es la derivada del voltaje en terminales:
i(t) = C
dv
dt
.
Integrando, el voltaje esta dado por
v(t) =
1
C
t
t
0
i()d + v(t
0
), (2.28)
que se puede aproximar mediante alguna formula discreta. Usando nueva-
mente la regla trapezoidal, se obtiene
v(t)
h
2C
[i(t) + i(t
0
)] + v(t
0
). (2.29)
La corriente se puede despejar de esta ecuacion para obtener:
i(t)
2C v
h
2C v(t
0
)
h
+ i(t
0
)
(2.30)
Una red resistiva que tiene esta ecuacion caracterstica es la mostrada en la
Figura 2.13. A esta red se le llama circuito asociado del capacitor.
2.2.3 Proceso de simulaci on
Otros componentes de redes electricas tienen circuitos asociados similares
a los presentados arriba. Por ejemplo, una lnea de transmision se modela
2.2. CIRCUITOS ASOCIADOS 43
R=h/2C I=-2Cv(t0)/h - i(t0)
Figura 2.13: Circuito resistivo asociado con un capacitor lineal.
como una red de dos puertos formada por resistencias y fuentes de corriente
dependientes. La resistencias no necesitan modicacion para incluirse en la
red discreta, mientras que la conmutaci on de interruptores se simula cam-
biando la topologa de la red. Los detalles dependen de la implementacion
en particular, pero podemos anotar las siguientes ideas generales.
Dadas la condiciones iniciales i(0) para todas las ramas del circuito, se
ensambla una red que contiene solamente resistencias, fuentes de corriente y
fuentes de voltaje, la cual es el equivalente discreto del circuito original para
t = h. La solucion de esta red resistiva consiste en un conjunto de voltajes
nodales v(h), a partir del cual se determinan las corrientes de rama i(h). El
proceso se repite entonces para obtener v(2h), v(3h), etc.
Es decir, la simulaci on dinamica del circuito se lleva a cabo resolviendo
una serie de redes resistivas correspondientes cada una a un paso de inte-
gracion. El enfoque esbozado es el principio en el que estan basados algunos
de los simuladores de circuito mas utilizados:
EMTP/ATP. Programa de simulaci on de transitorios orientado a redes
electricas, con soporte para los componentes mas comunes como lneas
de transmision, transformadores e incluso elementos de electronica de
potencia. EMTP es la implementacion original, que ahora se comer-
cializa. ATP es una versi on equivalente disponible sin costo.
SPICE. Programa de simulacion orientado a circuitos electronicos. Su
librera incluye muchos componentes discretos (p.ej. transistores).
44 CAP
ITULO 2. M
ETODOS DE SIMULACI
ON
Parte II
Programas de simulacion
45
Captulo 3
Introduccion a Matlab
Matlab es un entorno interactivo de calculo. Su nombre signica Matrix
Laboratory, pues su enfasis es la manipulacion y calculo con matrices; sin
embargo cuenta con otros recursos que lo convierten en una herramienta muy
conveniente para el desarrollo de metodos numericos. Entre otras facilidades,
ofrece rutinas de gracacion, funciones matematicas, y solucion directa e iter-
ativa de ecuaciones algebraicas lineales. El lenguaje Matlab es una lenguaje
de alto nivel que aprovecha las rutinas disponibles en el entorno, y puede
usarse para extender las capacidades del mismo a traves de la adicion de
nuevas funciones denidas por el usuario.
La sintaxis del lenguaje Matlab se parece mucho a la notacion matematica
convencional, por lo que es relativamente sencilla de aprender. Es un lenguaje
interpretado, lo que signica que las operaciones no se convierten a lenguaje
maquina sino que se ejecutan directamente en el espacio de memoria del
programa. Por esta razon, los programas en lenguaje Matlab pueden requerir
un tiempo de ejecucion mayor comparado con el de un lenguaje compilado
como C.
3.1 Entorno
El entorno de Matlab es una ventana de comandos en modo texto. El smbolo
de peticion de comandos es >>. La version se muestra con el comando
>> ver
--------------------------------------------------
MATLAB Version 5.2.0.3084 on PCWIN
47
48 CAP
ITULO 3. INTRODUCCI
ON A MATLAB
MATLAB License Identification Number: 107815
--------------------------------------------------
Las operaciones aritmeticas utilizan los operadores usuales. El resultado
de un comando se despliega despues de entrarlo:
>> sqrt(4^3) - 2/10
ans =
7.8
Note que el resultado en este caso se retorna en la variable automatica
ans. Tambien se puede especicar el nombre de la variable de retorno:
>> y = 2+2
y =
4
Todo lo que siga al signo % se toma como un comentario y es ignorado
por el procesador de comandos:
>> %Comentario
>>
Se ejecuta un comando del sistema operativo con el smbolo !:
>> ! del temp.txt
>>
Un listado de las variables actualmente denidas en el entorno resulta de
>> who
ans y
A veces es conveniente respaldar a disco las variables actuales. lo cual se
hace con
>> save caso1
Esta operacion resulta en un archivo caso1.mat en el directorio actual.
En una sesion posterior se recuperan la variables con
>> load caso1
El directorio de trabajo se muestra con
3.1. ENTORNO 49
>> cd
c:\emelgoza\fld\mlb
y puede cambiarse de la manera usual.
Se obtiene ayuda en lnea con el comando
>> help
HELP topics:
matlab\general - General purpose commands.
matlab\ops - Operators and special characters.
matlab\lang - Programming language constructs.
matlab\elmat - Elementary matrices and matrix manipulation.
matlab\elfun - Elementary math functions.
matlab\specfun - Specialized math functions.
matlab\matfun - Matrix functions - numerical linear algebra.
matlab\datafun - Data analysis and Fourier transforms.
matlab\polyfun - Interpolation and polynomials.
matlab\funfun - Function functions and ODE solvers.
matlab\sparfun - Sparse matrices.
matlab\graph2d - Two dimensional graphs.
matlab\graph3d - Three dimensional graphs.
matlab\specgraph - Specialized graphs.
matlab\graphics - Handle Graphics.
matlab\uitools - Graphical user interface tools.
matlab\strfun - Character strings.
matlab\iofun - File input/output.
matlab\timefun - Time and dates.
matlab\datatypes - Data types and structures.
matlab\winfun - Windows Operating System Interface Files (DDE/ActiveX)
matlab\demos - Examples and demonstrations.
toolbox\pde - Partial Differential Equation Toolbox.
toolbox\tour - MATLAB Tour
toolbox\local - Preferences.
For more help on directory/topic, type "help topic".
La ayuda para un comando en particular, por ejemplo format, se ob-
tiene con el comando
>> help format
50 CAP
ITULO 3. INTRODUCCI
ON A MATLAB
FORMAT Set output format.
All computations in MATLAB are done in double precision.
FORMAT may be used to switch between different output
display formats as follows:
FORMAT Default. Same as SHORT.
FORMAT SHORT Scaled fixed point format with 5 digits.
FORMAT LONG Scaled fixed point format with 15 digits.
FORMAT SHORT E Floating point format with 5 digits.
FORMAT LONG E Floating point format with 15 digits.
FORMAT SHORT G Best of fixed or floating point format with 5 digits.
FORMAT LONG G Best of fixed or floating point format with 15 digits.
FORMAT HEX Hexadecimal format.
FORMAT + The symbols +, - and blank are printed
for positive, negative and zero elements.
Imaginary parts are ignored.
FORMAT BANK Fixed format for dollars and cents.
FORMAT RAT Approximation by ratio of small integers.
Spacing:
FORMAT COMPACT Suppress extra line-feeds.
FORMAT LOOSE Puts the extra line-feeds back in.
3.2 Matrices y vectores
Un vector se dene listando sus componentes. Un vector la es, por ejemplo:
>> a = [0, 2, 3]
a =
0 2 3
Las comas son opcionales. Para denotar un nuevo renglon, se usa punto
y coma. El siguiente es un vector columna:
>> b = [0; 81; 7; -19]
0
81
7
-19
Una matriz se dene listando sus las:
3.2. MATRICES Y VECTORES 51
>> A = [1 1 1 1; 0 2 3 4; 0 1 2 3; 5 2 1 0]
A =
1 1 1 1
0 2 3 4
0 1 2 3
5 2 1 0
Una comilla denota transposicion:
>> A
ans =
1 0 0 5
1 2 1 2
1 3 2 1
1 4 3 0
Tambien se hubiera podido utilizar
>> transpose(A)
Se accede a renglones individuales con:
>> A(2,:)
ans =
0 2 3 4
o bien a columnas individuales:
>> A(:,4)
ans =
1
4
3
0
En estos ejemplo, los dos puntos denotan todo el rango. Tambien se
puede especicar una submatriz
A(1:2,1:3)
ans =
1 1 1
0 2 3
La suma de matrices usa la notacion convencional:
52 CAP
ITULO 3. INTRODUCCI
ON A MATLAB
B = A + A
B =
2 1 1 6
1 4 4 6
1 4 4 4
6 6 4 0
Otras operaciones con matrices son la sustraccion y la multiplicaci on:
>> A - A
ans =
0 1 1 -4
-1 0 2 2
-1 -2 0 2
4 -2 -2 0
>> A * A
ans =
4 9 6 8
9 29 20 7
6 20 14 4
8 7 4 30
Para eliminar ciertas entradas de un vector o matriz:
>> B = A;
>> B(:,4) = []
B =
1 1 1
0 2 3
0 1 2
5 2 1
3.3 Funciones matriciales
Las siguientes son funciones de matrices, es decir, tienen una matriz como
argumento: la inversa, el determinante, el rango, el n umero de condicion, y
la traza. Se eval uan con los comandos siguientes (se ha eliminado la salida
utilizando punto y coma al nal del comando):
3.3. FUNCIONES MATRICIALES 53
>> B = inv(A);
>> b = det(A);
>> b = rank(A);
>> b = cond(A);
>> b = trace(A);
Los valores y vectores propios de la matriz son
>> [vec, val] = eig(A)
vec =
0.28377 0.11868 0.14658 -3.4597e-016
0.69383 -0.35603 -0.29976 -0.40825
0.45215 -0.59339 -0.64398 0.8165
0.48336 0.71207 0.68844 -0.40825
val =
6.7417 0 0 0
0 -1 0 0
0 0 -0.74166 0
0 0 0 -4.1111e-016
Este es un ejemplo de un comando que retorna varios valores. Las colum-
nas de vec son los vectores propios y las entradas diagona nes de val son
los valores propios.
Varias factorizaciones de matrices son posibles: LU, descomposicion en
valores singulares, QR. Las llamadas respectivas son:
>> B = lu(A);
>> B = svd(A);
>> B = qr(A);
Es posible generar matrices especiales: unitarias, de ceros, aleatorias,
cuadrados magicos. Por ejemplo:
>> eye(3)
ans =
1 0 0
0 1 0
0 0 1
>> zeros(2,4)
ans =
0 0 0 0
0 0 0 0
54 CAP
ITULO 3. INTRODUCCI
ON A MATLAB
>> rand(2,2)
ans =
0.95013 0.60684
0.23114 0.48598
>> magic(4)
ans =
16 2 3 13
5 11 10 8
9 7 6 12
4 14 15 1
Cuando una matriz tiene muchas entrads nulas, es conveniente almace-
narla como matriz dispersa:
>> C = eye(10);
>> C = sparse(C)
C =
(1,1) 1
(2,2) 1
(3,3) 1
(4,4) 1
(5,5) 1
(6,6) 1
(7,7) 1
(8,8) 1
(9,9) 1
(10,10) 1
En el ejemplo, se convirti o una matriz llena a dispersa. En la practica,
es mas usual generar un listado de entradas y construir la matriz dispersa de
dimension mn con el comando
>> C = sparse( renglones, columnas, valores, m, n)
3.4 Solucion de ecuaciones lineales
Una de las operaciones mas frecuentemente utilizadas es la solucion del sis-
tema lineal de ecuaciones Ax = b. En Matlab, se utiliza una diagonal
invertida para calcular x:
3.5. LENGUAJE DE PROGRAMACI
ON 55
>> A = [ 2 1 1 6; 1 4 4 6; 1 4 4 4; 6 6 4 0 ]
A =
2 1 1 6
1 4 4 6
1 4 4 4
6 6 4 0
>> b = [ 0; 81; 7; -19 ]
b =
0
81
7
-19
>> x = A\b
x =
-106.71
327.79
-336.36
37
3.5 Lenguaje de programacion
El usuario de Matlab puede agregar sus propias funciones. Para denir una
nueva funcion, por ejemplo f(x) = x
2
, se crea un archivo de texto que en
este caso llamaremos cuadrado.m. La extension es importante: Matlab
busca en el directorio de trabajo o en la ruta hasta encontrar un archivo con
el nombre de la funcion y extension .m. El contenido de tal archivo es la
denicion de la funcion:
function f=cuadrado(x)
f = x*x;
return
Matlab ofrece las capacidades usuales de los lenguajes de programacion
estructurados como son ciclos y operaciones logicas. Un ciclo que se ejecuta
un n umero jo de veces es (a menos que se encuentre el comando BREAK):
FOR variable = expresion : expresion
comandos (BREAK)
END
Un ciclo que se ejecuta tantas veces como se cumpla la condicion de
prueba:
56 CAP
ITULO 3. INTRODUCCI
ON A MATLAB
WHILE expresion
comandos (BREAK)
END
La estructura logica estandar es:
IF expresion
comandos
ELSEIF expresion
comandos
ELSE
comandos
END
Los operadores logicos AND, OR, NOT, EQUALS, se representan medi-
ante los smbolos &, |, , ==. Una accion que depende del valor de una
variable se implementa con:
SWITCH expresion_1
CASE expresion_2
comandos
CASE {expresion_3, expresion_4, .. }
comandos
OTHERWISE,
comandos
END
Una de las ventajas de Matlab es que las variables no tienen tipo jo. Es
decir, un nombre de variable puede emplearse para almacenar un escalar (en-
tero o real), un vector, una matriz, etc. El tipo se determina dinamicamente
al declarar la variable, y se puede cambiar subsecuentemente. Tambien es
posible denir estructuras de datos; por ejemplo, para denir una variable
que almacene los pormenores de una chica, se podra escribir:
>> Patricia.Edad = 22;
>> Patricia.Telefono = 123456;
>> Patricia.Medidas = [90 60 90]
Patricia =
Edad: 22
Telefono: 123456
Medidas: [90 60 90]
3.6. GR
AFICACI
ON 57
3.6 Gracacion
Una de las capacidades mas convenientes de Matlab es la facilidad con que se
pueden construir gracos de variables y funciones. Por ejemplo, la secuencia
siguiente produce el graco de la Fig.3.1
>> x = 0 : 0.1 : 5;
>> y = sin(x) .* exp(-x);
>> plot(x,y)
>> grid on
>> xlabel(x)
>> ylabel(y)
>> title(Grafico)
>> print -deps funcion.eps
El primero de estos comandos produce un vector de puntos igualmente
espaciados en x, los cuales se usan para evaluar la funcion y en el segundo
comando. Observe que se debe utilizar el smbolo .* para indicar la multi-
plicacion uno a uno de los elementos del vector; de otra manera, el smbolo
* por s solo indicara multiplicaci on matricial. El comando para gracar es
simplemente plot. Los comandos restantes agregan la rejilla, etiquetas de
los ejes y ttulo. El ultimo de los comandos produce un archivo de disco en
formato EPS (Encapsulated PostScript), el cual es util cuando se requiere in-
sertar gracos en alg un documento (existen otros formatos de salida posibles:
consultar la ayuda de print).
3.6.1 Figuras geometricas
En nuestro caso, es conveniente desplegar en pantalla entidades geometricas
varias, como lneas y polgonos. Algunos comandos para tal efecto se listan
enseguida.
axis o - Suprime los ejes de coordenadas de la salida graca.
axis auto - Seleciona automaticamente los lmites de gracacion.
axis equal - Fija iguales escalas para loos ejes de coordenadas.
Esto
evita que las guras aparezcan deformadas.
Para trazar lneas o polgonos en un color especco, se usa el comando
>> line( x, y,Color,[0,0,0])
58 CAP
ITULO 3. INTRODUCCI
ON A MATLAB
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
x
y
Grafico
Figura 3.1: Graco de la funcion y(x) = sen(x)e
x
En el comando anterior, x y y son los vectores de coordenadas y el color
se especica mediante ndices RGB (rojo, verde, azul) de 0 a 1. Si el n umero
de coordenadas es 2, se traza una lnea. Si es 3 o mas, se traza una lnea
entre cada par de puntos consecutivos.
Para desplegar polgonos se usa el comando
>> patch( x, y, Color)
Los argumentos son las coordenadas de los vertices y el color de relleno, el
cual puede se plano o interpolado. El siguiente comando se usa para colocar
texto en una posicion dada del graco. El signicado de los argumentos es
evidente:
>> text(x,y,text,Color,TextColor,FontSize,7)
3.7 Otros comandos utiles
Los siguientes comandos son utiles en ciertas situaciones. Se muestra el
nombre del comando y una breve descripcion de su funcion. Para mayores
detalles sobre su uso, se debe consultar la ayuda en lnea.
3.7. OTROS COMANDOS
UTILES 59
disp - Despliega un mensaje en la ventana de comandos.
error - Despliega un mensaje de error en la ventana de comandos y
detiene la ejecucion de la funcion.
fclose - Cerrar archivo en disco.
nd - Retorna el n umero de elementos en una matriz que cumplen una
condicion.
fopen - Abrir archivo en disco.
fprintf - Escribir a archivo en disco.
length - Retorna el n umero de elementos en un vector o matriz.
max - Retorna el valor maximo de un vector o matriz.
min - Retorna el valor mnimo de un vector o matriz.
size - Retorna el n umero de las y columnas de una matriz.
sort - Ordenar entradas de vector o matriz.
sortrows - Ordenar una matriz por renglones.
spy - Muestra gracamente las entradas no nulas de una matriz.
60 CAP
ITULO 3. INTRODUCCI
ON A MATLAB
Captulo 4
Introduccion al ATP
Antes de la existencia de computadoras digitales, los simuladores TNA (Tran-
sient Network Analyzers) eran el medio mas com un para realizar estudios
de transitorios en redes. Un TNA consiste en elementos fsicos (reactores,
transformadores, maquinas de tama no reducido), conectados a un sistema de
medicion y control y complementados con una computadora analogica. Es
decir, un analisis de la operacion de un sistema de potencia se haca en un
modelo a escala del mismo.
Con el surgimiento de las computadoras digitales, se dio la posibilidad
de utilizar calculos que realizan la tarea anteriormente hecha por un TNA.
EMTP (Electromagnetic Transients Program) es el nombre de uno de los
primeros programas de simulacion de transitorios en redes electricas [3]. Fue
originalmente desarrollado a nales de la decada de 1960 por el Dr. Hermann
Dommel, quien llevo el programa a la BPA (Boneville Power Administration,
Oregon, USA). Posteriormente el EPRI (Electric Power Research Institute)
continuo el desarrollo de manera privada. El cambio de licencia ocurrio
en 1984, a no en el que surgio la versi on ATP (Alternative Transients Pro-
gram); desde entonces ambos programas siguen rutas de desarrollo distintas.
Dado que la BPA es una compa na estatal, el programa ATP esta disponible
p ublicamente a usuarios de todo el mundo, siempre y cuando se cumpla una
serie de requisitos.
En este captulo se describen los fundamentos del ATP, pero dado el
tama no y complejidad del programa no es posible cubrir toda la informacion
existente. El lector interesado puede encontrar material adicional en las
fuentes siguientes:
61
62 CAP
ITULO 4. INTRODUCCI
ON AL ATP
Comite Argentino de Usuarios del EMTP/ATP:
http://www.iitree-unlp.org.ar/caue/claue
European EMTP Users Group:
http://www.eeug.org
4.1 Capacidades
EL ATP es un programa digital para la simulaci on de transitorios electro-
magneticos (un nombre acu nado por el Dr. Dommel que se reere a transito-
rios en redes electricas). Tambien puede utilizarse para simular transitorios
electromecanicos y de sistemas de control. El hilo com un es la simulaci on de
fenomenos transitorios en sistemas electricos de potencia.
Tpicamente, un estudio de transitorios en redes electricas puede em-
plearse para realizar estudios de dise no del sistema, por ejemplo coordinacion
de aislamiento, dimensionamiento de los equipos, especicacion de los equipos
de proteccion, y dise no de los sistemas de control.
Otra aplicacion com un es
en el analisis de problemas de operacion, como diagnostico de fallas.
El ATP tiene soporte para modelar los fenomenos siguientes:
Transitorios en redes con elementos concentrados, lneas aereas, cables.
Transitorios de conmutaci on: cierre y apertura de interruptores, ener-
gizacion de reactores y capacitores, recierres, voltajes de recobro, etc.
Estudios determinsticos y probabilticos de transitorios de conmutacion.
Descargas atmosfericas: arqueos, voltajes inducidos, propagacion de
impulsos, apartarrayos.
Armonicos en sistemas electricos.
Ferrorresonancia.
Flujo de potencia polifasico en estado estable.
Transitorios en componentes de electronica de potencia.
Transmisi on en alta tension en corriente directa.
Arranque de motores.
4.1. CAPACIDADES 63
Resonancia subsncrona, rechazo de carga.
La lista seguramente es incompleta. De hecho, dado que se trata de un
simulador de redes, cualquier fenomeno que acepte descripcion en terminos de
redes discretas puede simularse en ATP, por ejemplo transferencia de calor,
ujo en ductos, etc. El usuario tiene una variedad de elementos con los cuales
construir su modelo. Algunos de estos elementos son:
Elementos concentrados: Resistencia, capacitancia, inductancia.
Estos
dos ultimos pueden tener condiciones iniciales jadas por el usuario,
o calculadas mediante una corrida de ujos polifasicos. Pueden ser
elementos monofasicos o matriciales.
Inductores y resisores no lineales: estos se usan para representar n ucleos
saturables y apartarrayos.
Varios tipos de modelos de lneas de transmision y cables: secciones pi,
modelos distribudos, con dependencia de la frecuencia, etc.
Interruptores: bajo esta denominacion se agrupan interruptores de po-
tencia, diodos, SCRs, etc.
Fuentes: de voltaje y corriente de diversas formas de onda, incluyendo
por supuesto fuentes senoidales a frecuencia constante y fuentes tipo
impulso.
Maquina universal: puede representar maquinas de induccion, sncronas
y de corriente directa.
Sistemas de control: se emula una computadora analogica que calcula
la respuesta del sistema de control. Existen dos herramientas que im-
plementan esta funcionalidad.
El esquema de integracion usado en el ATP es la regla trapezoidal. Las vari-
ables de salida son corrientes de rama, voltajes de nodo, energas, potencias
y variables de control.
64 CAP
ITULO 4. INTRODUCCI
ON AL ATP
4.2 ATP
4.2.1 Como obtener el programa
Para poder acceder al programa ATP, se requiere que el usuario se registre
llenando y rmando una forma. Una vez aprobado, recibe el nombre de
usuario y contrase na para acceder al deposito de los programas en los sitios de
internet de los grupos de usuarios europeo y japones. En esos sitios seguros
se encuentran tanto el programa principal como programas de soporte y
documentaci on. En Mexico, se puede pedir una licencia de uso a traves de:
Francisco Javier Pe~naloza Sanchez
Tel.: 01 (443) 322 5262, 5263
Fax : 01 (443) 322 7276
E-mail: fjpenaloza@cfe.gob.mx
CFE Div. Centro Occidente
Delegacion del LAPEM
Av. Ventura Puente No. 1653
Morelia, Mich, MEX CP 58290
4.2.2 Instalacion
La instalacion del programa ATP puede resultar complicada o directa, depen-
diendo del sistema usado. Durante mucho tiempo la unica versi on disponible
en sistemas DOS y Windows estaba basada en un extensor de memoria: el
sistema operativo DOS tiene un lmite de memoria de 656KB y para poder
correr ATP se requiere mas memoria que esta, por lo que se recurrio a un
programa especial que enga na al sistema operativo.
Esta versi on se conoce
con el nombre del programa extensor, Salford; es un tanto difcil de insta-
lar y actualmente existen versiones alternativas. No describiremos aqu la
instalacion de versiones Salford.
Para las versiones modernas como MINGW32 y Watcom, la instalacion
se limita a reunir los archivos ejecutables y libreras en un subdirectorio,
jar la ruta del sistema operativo para incluirlo y especicar una variable de
entorno.
Por ejemplo, para instalar la version MINGW32 en Windows 95/98/NT/XP,
se procede como sigue:
4.2. ATP 65
1. Descomprimir los archivos del paquete ZIP, colocandolos en un subdi-
rectorio, por ejemplo
c:\ATP\BIN
2. Agregar las lneas siguientes al archivo AUTOEXEC.BAT en el direc-
torio raz del disco de arranque:
PATH=%PATH%;C:\ATP\BIN
SET GNUDIR=C:\ATP\BIN\
Observe la diagonal inversa en la ultima lnea.
3. Reiniciar la computadora.
4.2.3 Uso
El programa ATP no es interactivo, sino que ejecuta la simulaci on utilizando
los datos contenidos en un archivo de texto con formato especial.
Este archivo
contiene informacion como el tama no del paso de integraci on, el intervalo de
simulacion, la descripcion de los componentes, y la peticion de las variables
a reportar. El archivo de datos tiene una extension ATP, DAT, o alguna otra
determinada por el usuario. El resultado es un archivo de variables de salida
con extension PL4, que puede utilizarse como entrada para un programa de
gracacion. Tambien se generan archivos de diagnostico con extension LIS
(u otra especicada por el usuario) y DBG. El archivo LIS le da al usuario
un reporte de la ejecucion del programa, y es util para determinar errores en
el modelo si es que los hay. El archivo DBG contiene informacion util para
los programadores, y generalmente el usuario no esta interesado en los datos
que contiene.
Un ejemplo es conveniente aqu. Considere el circuito mostrado en la
Figura 4.1. Para poder simular este circuito en ATP, es necesario escribir un
archivo de datos utilizando alg un procesador de texto.
Este archivo toma la
siguiente forma:
BEGIN NEW DATA CASE
C
C dT >< Tmax >< Xopt >< Copt >
.001 .1
500 1 1 1 1 0 0 1 0
C 1 2 3 4 5 6 7 8
66 CAP
ITULO 4. INTRODUCCI
ON AL ATP
C 345678901234567890123456789012345678901234567890123456789012345678901234567890
/BRANCH
C < n 1>< n 2><ref1><ref2>< R >< L >< C >
C < n 1>< n 2><ref1><ref2>< R >< A >< B ><Leng><><>0
SRC NOD1 1. 0
NOD1 NOD2 3. 0
NOD1 1. 3
NOD2 3. 3
/SWITCH
C < n 1>< n 2>< Tclose ><Top/Tde >< Ie ><Vf/CLOP >< type >
/SOURCE
C < n 1><>< Ampl. >< Freq. ><Phase/T0>< A1 >< T1 >< TSTART >< TSTOP >
11SRC 0 100. 1.
/INITIAL
/OUTPUT
BLANK BRANCH
BLANK SWITCH
BLANK SOURCE
BLANK INITIAL
BLANK OUTPUT
BLANK PLOT
BEGIN NEW DATA CASE
BLANK
Observe como el formato de este archivo de datos es rgido: las tarjetas o
palabras clave deben ir en un orden especco,y los datos en un renglon deben
ir en ciertas columnas. El formato requerido esta documentado en el Rule-
Book, el manual de usuario del programa [4]. La especicacion del sistema a
simular debe contemplar las ramas, transformadores, lneas, interruptores y
fuentes que conforman el modelo.
El usuario debe especicar, aparte del modelo del sistema a simular, una
serie de variables que controlan la ejecucion del programa, por ejemplo el
tama no del paso de integraci on y el tiempo total a simular. Enseguida se
comentan algunas de esta variables, as como criterios para su seleccion; una
descripcion detallada de estas variables se puede encontrar en [4].
DELTAT - Esta variable controla el tama no del paso de tiempo (em-
pleado en la integraci on numerica). Obviamente debe ser siempre
mayor que cero, y su valor no debe ser muy grande. En general, el valor
de DELTAT debera ser tal que resulte en diez puntos de muestreo en
la maxima frecuencia de interes.
TMAX - Especica el periodo de tiempo a simular. La simulacion
arranca siempre en t = 0, de modo que si TMAX es negativo o cero,
el programa ejecuta una solucion en estado estacionario pero no la
simulacion del transitorio.
4.2. ATP 67
+
Vs
R1 R2
L1 L2
Figura 4.1: Circuito RL-RL de ejemplo.
XOPT - Es la frecuancia del sistema a la cual se especican las reactan-
cias inductivas en el modelo. Si este valor es cero o esta en blanco, las
inductancias se asumen dadas en mH. Si es un n umero positivo, las in-
ductancias se asumen dadas como reactancias calculadas a la frecuencia
XOPT.
COPT - Es la frecuancia del sistema a la cual se especican las reactan-
cias capacitivas en el modelo. Si este valor es cero o esta en blanco, las
inductancias se asumen dadas en H. Si es un n umero positivo, las in-
ductancias se asumen dadas como reactancias calculadas a la frecuencia
XOPT.
El programa se corre en una ventana de comandos. Por ejemplo, en
sistemas DOS y Windows, si el ejecutable tiene el nombre TPBIG.EXE y esta
en la ruta del sistema operativo, entonces se puede llamar desde cualquier
subdirectorio:
c:\emelgoza\atp\dat\tpbig
ATP started at 08:33:51 on Wednesday, 01 January 2003
EMTP begins. Send one of the following alternatives.
SPY, file_name, DISK, HELP, GO, KEY, STOP, BOTH, DIR:
HELP proporciona una breve descripcion de cada comando. El caso mas
com un es el de pasar directamente el nombre del archivo de datos; se debe
proporcionar el nombre completo, incluyendo su extension. Se puede incluir
la ruta completa en caso de que el archivo resida en un subdirectorio distinto
al actual, pero este caso no es com un: usualmente se inicia el programa en
el directorio que contiene los archivos de datos del usuario. Por omision, el
reporte de ejecucion se muestra en pantalla solamente mientras que el archivo
68 CAP
ITULO 4. INTRODUCCI
ON AL ATP
de variables de salida PL4 se escribe a disco. Para especicar que se desea
un archivo de reporte de ejecucion, se especica el comando DISK (reporte
solo a disco) o bien BOTH (reporte a pantalla y a disco).
Si todo va bien, el programa se ejecutara sin problemas y generara el
archivo de diagnostico:
Alternative Transients Program (ATP), GNU Linux or DOS. All rights reserved by Can/Am user group of Portland, Oregon, USA.
Date (dd-mth-yy) and time of day (hh.mm.ss) = 14-Feb-03 00:20:18 Name of disk plot file is \emelgoza\atp\dat\circuito-rlrl.pl4
Consult the 860-page ATP Rule Book of the Can/Am EMTP User Group in Portland, Oregon, USA. Source code date is 06 September 2002.
Total size of LABCOM tables = 500638 INTEGER words. VARDIM List Sizes follow : 1502 1800 3K 300 15K 240
4200 10500 450 960 300 300 30K 120 21600 240 24 30 9600 5160 600 2100 24K 18 2400 504 150 42K 6 12
--------------------------------------------------+--------------------------------------------------------------------------------
Descriptive interpretation of input data cards. | Input data card images are shown below, all 80 columns, character by character
0 1 2 3 4 5 6 7 8
012345678901234567890123456789012345678901234567890123456789012345678901234567890
--------------------------------------------------+--------------------------------------------------------------------------------
Comment card. KOMPAR > 0. |C data:C:\EMELGOZA\ATP\DAT\CIRCUITO-RLRL.ATP
Marker card preceding new EMTP data case. |BEGIN NEW DATA CASE
Comment card. KOMPAR > 0. |C --------------------------------------------------------
Comment card. KOMPAR > 0. |C Generated by ATPDRAW Febrero, Viernes 14, 2003
Comment card. KOMPAR > 0. |C A Bonneville Power Administration program
Comment card. KOMPAR > 0. |C Programmed by H. K. Hidalen at SEfAS - NORWAY 1994-2002
Comment card. KOMPAR > 0. |C --------------------------------------------------------
Comment card. KOMPAR > 0. |C dT >< Tmax >< Xopt >< Copt >
Misc. data. 1.000E-03 1.000E-01 0.000E+00 | .001 .1
Misc. data. 500 1 1 1 1 0 0 1 0 0 | 500 1 1 1 1 0 0 1 0
Comment card. KOMPAR > 0. |C 1 2 3 4 5 6 7 8
Comment card. KOMPAR > 0. |C 345678901234567890123456789012345678901234567890123456789012345678901234567890
Comment card. KOMPAR > 0. |C < n 1>< n 2><ref1><ref2>< R >< L >< C >
Comment card. KOMPAR > 0. |C < n 1>< n 2><ref1><ref2>< R >< A >< B ><Leng><><>0
Series R-L-C. 1.000E+00 0.000E+00 0.000E+00 | SRC NOD1 1. 0
Series R-L-C. 3.000E+00 0.000E+00 0.000E+00 | NOD1 NOD2 3. 0
Series R-L-C. 0.000E+00 1.000E-03 0.000E+00 | NOD1 1. 3
Series R-L-C. 0.000E+00 3.000E-03 0.000E+00 | NOD2 3. 3
Blank card ending branches. IBR, NTOT = 4 4 |BLANK BRANCH
Comment card. KOMPAR > 0. |C < n 1>< n 2>< Tclose ><Top/Tde >< Ie ><Vf/CLOP >< type >
Blank card ending switches. KSWTCH = 0. |BLANK SWITCH
Comment card. KOMPAR > 0. |C < n 1><>< Ampl. >< Freq. ><Phase/T0>< A1 >< T1 >< TSTART >< TSTOP >
Source. 1.00E+02 0.00E+00 0.00E+00 0.00E+00 |11SRC 0 100. 1.
Blank card ends electric sources. KCONST = 1 |BLANK SOURCE
List of input elements that are connected to each node. Only the physical connections of multi-phase lines are shown (capacitive
and inductive coupling are ignored). Repeated entries indicate parallel connections. Switches are included, although sources
(including rotating machinery) are omitted -- except that U.M. usage produces extra, internally-defined nodes "UMXXXX".
--------------+------------------------------
From bus name | Names of all adjacent busses.
--------------+------------------------------
SRC |NOD1 *
NOD1 |TERRA *SRC *NOD2 *
NOD2 |TERRA *NOD1 *
TERRA |NOD1 *NOD2 *
--------------+------------------------------
Blank card ending requests for output variables. |BLANK OUTPUT
Column headings for the 4 EMTP output variables follow. These are divided among the 5 possible classes as follows ....
First 2 output variables are electric-network voltage differences (upper voltage minus lower voltage);
Next 2 output variables are branch currents (flowing from the upper node to the lower node);
Step Time NOD1 NOD2 NOD1 NOD2
TERRA TERRA TERRA TERRA
0 0.0 0.0 0.0 0.0 0.0
% % % % % % Final time step, PLTFIL dumps plot data to ".PL4" disk file.
Done dumping plot points to C-like disk file.
100 0.1 .14211E-13 -.158E-14 100. .4737E-14
Extrema of output variables follow. Order and column positioning are the same as for the preceding time-step loop output.
Variable maxima : 62.0689655 41.3793103 100. 11.17717
Times of maxima : .1E-2 .1E-2 .062 .002
Variable minima : 0.0 -15.6956 0.0 0.0
Times of minima : 0.0 .002 0.0 0.0
Blank card terminating all plot cards. |BLANK PLOT
Actual List Sizes for the preceding solution follow. 14-Feb-03 00:20:19
Size 1-10: 4 4 4 1 10 0 7 0 0 0
Size 11-20: 0 4 -9999 -9999 -9999 0 0 0 23 0
4.2. ATP 69
Size 21-30: 0 0 2 0 -9999 0 -9999 -9999 -9999 0
Seconds for overlays 1-5 : 0.020 0.000 0.020 -- (CP: Wait; Real)
Seconds for overlays 6-11 : 0.000 0.000 0.000
Seconds for overlays 12-15 : 0.000 0.000 0.000
Seconds for time-step loop : 0.000 0.000 0.000
Seconds after DELTAT-loop : 0.000 0.000 0.000
---------------------------
Totals : 0.020 0.000 0.020
Como ya se ha dicho, la mayor utilidad de este archivo de diagnostico es
que proporciona mensajes que pueden emplearse para determinar la fuente
de error si es que lo hay. La topologa de la red puede vericarse aqu.
Tambien permite realizar una evaluacion inicial de los resultados (por ejem-
plo, los valores maximos observados), para determinar si los resultados son
coherentes.
La forma de la salida de diagnostico puede adaptarse mediante las vari-
ables listadas enseguida. Estas variables se jan en el archivo de datos; para
mayor detalle se debe consultar [4].
IOUT - La frecuencia con la que se imprimen los valores tomados por
las variables seleccionadas para salida. Si IOUT=10, se imprime el
resultado cada 10 pasos de integracion.
IPLOT - Semejante a IPRINT, pero referido a los datos empleados
para gracar el resultado. Un valor de 1 es recomendable.
IDOUBL - Un valor de 1 en esta variable ocasiona un reporte de la
topologa del modelo.
KSSOUT - Un valor de 1 hace que la salida incluya un reporte de la
solucion de estado estacionario (ejecutada previamente a la simulacion
del transitorio con nes de inicializacion).
MAXOUT - Un valor de 1 hace que se imprima un reporte de los valores
maximos y mnimos y el tiempo en el cual ocurren.
ICAT - Un valor de 1 hace que los datos de la simulaci on se almacenen
en un archivo (con extension PL4) que puede posteriormente gracarse
o procesarse con un programa especial.
NENERG - Un valor mayor que 0 especica una simulacion proba-
bilstica.
El otro archivo de diagnostico (DBG) luce as:
70 CAP
ITULO 4. INTRODUCCI
ON AL ATP
RFUNL1 connects diagnostic file. IPRSUP = -1 in STARTUP suppresses such output (see Jan, 96, newsletter).
RFUNL1 connects DEBUG.LIS file. IPRSUP = -1 in STARTUP suppresses such output (see Jan, 96, newsletter).
GNU RFUNL1 defines SLOT1 =
both C:\emelgoza\atp\dat\circuito-RLRL.atp s -r KPARAM = 1
RSTART, old and new LIMCRD = 0 30000
RFUNL1 sets final LINUSE = -1
Exit LOWCAS with TEXT(1:K2) =.lis
Exit LOWCAS with TEXT(1:K2) =.pch
Exit LOWCAS with TEXT(1:K2) =.pl4
Begin LFLUSH by setting L6HAND = -99.
over1 defines DENABL = ENABLE
Top of CIMAG4. KPARAM = 1
Top of CIMAG4. SLOT1 =
both C:\emelgoza\atp\dat\circuito-RLRL.atp s -r
CIMAG4 checks for FILE. J = 0
CIMAG4 loads param. KPARAM, J = 1 4
CIMAG4 loads param CIM132 =
both
CIMKEY uses LINUSE, N = -1 0
CIMKEY right-most nonblank N32 = 4
Bottom of CIMKEY. N36, N32, CIM132(1:N32) = 0 4both
over1 finds column KWCOMM, KILL = 57 0
Top of CIMAG4. KPARAM = 6
Top of CIMAG4. SLOT1 =
both C:\emelgoza\atp\dat\circuito-RLRL.atp s -r
CIMAG4 loads param. KPARAM, J = 6 42
CIMAG4 loads param CIM132 =
C:\emelgoza\atp\dat\circuito-RLRL.atp
CIMKEY uses LINUSE, N = -1 0
CIMKEY right-most nonblank N32 = 37
Bottom of CIMKEY. N36, N32, CIM132(1:N32) = 0 37
C:\emelgoza\atp\dat\circuito-RLRL.atp
over1 finds column KWCOMM, KILL = 0 0
Input data file JUNIT6(1:N8) =C:\EMELGOZA\ATP\DAT\CIRCUITO-RLRL.ATP
Input arg? k, L, INCDAT, KCARD1 = 132 0 0 1
allocated array2 in writ10,limitcards,nextblock= 30000 20000
allocated array3 in writ10,limitcards,nextblock= 60000 30000
Begin new DIMENS. NCHARG, LISBEG = -55222 -22666
Initialize. LUNDAT, LUNIT6, NUMDCD, LISBEG = 3 6 0 -22666
DIMENS builds BUFF77 =
C:\ATP\BIN\listsize.dat
length LENPTH = 11
DIMEN1 builds BUFF77 =
C:\ATP\BIN\listsize.dat
length LENPTH = 11
Exit new DIMENS. LISBEG = 0
Begin new DIMENS. NCHARG, LISBEG = 20 0
Done 20. LSIZE(1:8) = 0 240000 29 3 23 24000 1 1502
Exit new DIMENS. LISBEG = 0
OVER1 checks LSTAT(14) = 0
Enter loop with top at SN 2338 J, KCARD2, kill = 1 32 0
Out of loop ending below SN 2382. KSLASH, kill = 1 0
Over1 after EMTSPY. kill = 0
Over1 checks NUMDCD, KASEND, KCARD2, LLBUFF = 0 5 26 -3333
^^^^ Top "SUBR1". NUMDCD, KASEND, KCARD2 = 0 5 26
Top SUBR1 saves XMAXMX, TENERG = 2. 1.E+020
subr1 sets LUNIT4, MOPLOT = -4 1
Begin new DIMENS. NCHARG, LISBEG = 0 0
Begin TAPSAV/TAPSIZ.
Done ENTRY TAPSIZ. N3 = 2002552
Bytes of LABCOM from TAPSIZ. N6 = 2002552
Exit new DIMENS. LISBEG = 0
LU2OPN ready to open with FNAME =dum12345.bin
LU2OPN ready to open with FSTAT =SCRATCH
Exit LOWCAS with TEXT(1:K2) =c:\emelgoza\atp\dat\circuito-rlrl.pl4
SYSDEP ready to read LUNIT6 file name. KPARAM = 44
Top of CIMAG4. KPARAM = 44
Top of CIMAG4. SLOT1 =
both C:\emelgoza\atp\dat\circuito-RLRL.atp s -r
CIMAG4 loads param. KPARAM, J = 44 47
CIMAG4 loads param CIM132 =
-r
CIMKEY uses LINUSE, N = -1 0
CIMKEY right-most nonblank N32 = 4
Revise this to before -r, N32 = 4
Bottom of CIMKEY. N36, N32, CIM132(1:N32) = 0 4 -r
Keyboard defines CIM132 =
4.2. ATP 71
-R
Parallel name begins with FILNAM =
c:\emelgoza\atp\dat\circuito-rlrl.lis
Salford SYSDEP. MAXKNT, MNT, ICAT, TMAX = 0 0 0 0.000000E+00
L4BYTE, ansi32L = 1
c:\emelgoza\atp\dat\circuito-rlrl.pl4
SYSDEP considers NUMRUN, KTRPL4 = 0 -6666
SYSDEP ready to delete old C-like .PL4 file. ANSI32L =
c:\emelgoza\atp\dat\circuito-rlrl.pl4
SYSDEP disconnects PL4? L4HAND, IERROR = 0 0
After C-like .PL4 delete.
Salford sysdep. L4HAND, IERROR = 10 0
Next, exit SYSDEP with KTRPL4 = -6666
SUBR1 near bottom, 1. NOTPPL = 1
Begin ENTRY OV1FLT of SUBR1.
Begin new DIMENS. NCHARG, LISBEG = 20 0
Done 20. LSIZE(1:8) = 0 240000 29 3 23 24000 1 1502
Exit new DIMENS. LISBEG = 0
SUBR15 sets new MIMSTP, JNDSTP = 9999999 7
Salford HEADL4 begins writing C-like header.
NUMBUS, NCHAIN = 0 15
After rewind. L4HAND, IERROR = 10 0
After 19-byte date/time. IERROR = 0
After 7 integers of C-like header. IERROR = 0
Done with C-like PL4 header. IPRSOV(23) = 158
TGRUNT. Wall-clock times for the time-step loop are: 00:20:19 00:20:19
MAIN20 checks KTRPL4, KEXACT = -6666 0
Salford HEADL4/PLTEND. L4BYTE, ICAT = 2178 1
L4HAND positioned on byte 43. N8 = 43
Salford HEADL4/PLTEND done. L4BYTE = 2178
TGRUNT. Wall-clock times for the time-step loop are: 00:20:19 00:20:19
Dummy ENTRY ENDPLT in SUBROUTINE EXTRA.
Top of LU4CLS. ICAT, LUNIT4, L4BYTE, L4HAND = 1 -4 2178 10
LU4CLS disconnects PL4. L4HAND, IERROR = 10 0
LU4CLS checks KPARAM, NCHAIN, KILL = -1 29 0
Begin new DIMENS. NCHARG, LISBEG = -66444 0
Top reinitializes. Set LISBEG = -22666.
Exit new DIMENS. LISBEG = -22666
End. M4PLOT, NOTMAX, KFILE5, LOCKBR = 2 0 0 0
OVER1 after EMTSPY. LSTAT(14) = 0
Enter loop with top at SN 2338 J, KCARD2, kill = 1 2 0
Out of loop ending below SN 2382. KSLASH, kill = 0 0
Over1 after EMTSPY. kill = 0
Over1 checks NUMDCD, KASEND, KCARD2, LLBUFF = 0 5 2 1025
Este reporte contiene informacion sobre dimensionamiento de las vari-
ables, procesos ejecutados, directorios y archivos de entrada y salida, etc.
Puede ser util si se tiene conocimiento avanzado de la operacion del simu-
lador, o bien como referencia al reportar problemas a los desarrolladores.
Si no se encontraron errores en el archivo de datos, el programa genera
como resultado de la simulaci on un archivo de gracacion con extension PL4.
Se trata de un archivo binario, el cual puede servir de entrada a una variedad
de gracadores que lo reconocen, o bien a una fuente de voltaje/corriente que
reproduce la se nal transitoria en tiempo real.
El proceso descrito es el uso tradicional del programa ATP. Es lo que se
llama un proceso por lotes, donde tpicamente se simula una secuencia de
casos previamente elaborados, y se examinan los resultados posteriormente.
Este tipo de proceso es reminiscente de la epoca de las computadoras mul-
tiusuario, las tarjetas perforadas y las terminales tipo texto. Y aunque tal
uso sigue siendo perfectamente operativo, las posibilidades gracas de las
72 CAP
ITULO 4. INTRODUCCI
ON AL ATP
computadoras actuales y la generalizacion del paradigma de ventanas/rat on
posibilitan un enfoque mas interactivo.
4.3 Gracadores
Existe un variedad de programas de gracacion aplicables. La razon es que
el analisis de los resultados no se hace sobre el listado de las variables, sino
en una graca que proporciona informacion de maneras que un humano com-
prende mejor. Algunos de los gracadores disponibles son:
GTPPLOT. Es el gracador nativo para ATP. Tiene un gran n umero
de opciones y puede mostrar varias gracas provenientes de archivos
distintos, pero puede resultar complicado para usuarios ocasionales.
Por otra parte, ofrece herramientas de analisis no disponibles en otros
gracadores, como analisis armonico.
PCPLOT. Es un programa en modo texto (pantalla completa) bajo
DOS. Permite guardar gracos en archivo en formato HPGL. Presenta
algunos problemas cuando se ejecuta bajo el sistema operativo Win-
dows XP.
PLOTXY. Es un gracador para Windows, con interfaz clara y capaci-
dad para m ultiples archivos. El graco puede copiarse al portapapeles
y pegarse en documentos. Muy conveniente para uso interactivo.
PL42MAT.
Este no es un gracador en s, sino un programa que con-
vierte los archivos PL4 a archivos MAT, que pueden ser importados en
Matlab y examinados all con las herramientas disponibles. Los gracos
de estas notas se realizaron con esta herramienta.
Para el caso de ejemplo de la seccion anterior, las gracas de las variables de
salida se muestran en las Figuras 4.2 y 4.3.
La instalacion de los gracadores mencionados se reduce a copiar el
archivo ejecutable en un directorio adecuado. Su uso es relativamente simple,
quizas con la excepcion de GTPPLOT.
4.3. GRAFICADORES 73
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01
20
0
20
40
60
80
100
Tiempo (s)
V
o
l
t
a
j
e
s
(
V
)
V1
V2
Figura 4.2: Voltajes nodales para circuito RL-RL
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01
0
10
20
30
40
50
60
70
80
90
100
Tiempo (s)
C
o
r
r
i
e
n
t
e
s
(
A
)
I1
I2
Figura 4.3: Corrientes en los inductores para circuito RL-RL.
74 CAP
ITULO 4. INTRODUCCI
ON AL ATP
4.4 ATPDRAW
El programa de captura esquematica ATPDRAW le proporciona al simulador
ATP una interfaz graca interactiva, adecuada a las expectativas de muchos
de los usuarios. ATPDRAW permite capturar el esquema del circuito o mo-
delo de la red, genera el archivo de datos correspondiente, y opcionalmente
llama al simulador ATP y al gracador. De esta manera, se puede realizar
un analisis completo sin salir de la interfaz graca y tambien sin tener que
escribir el archivo de datos. Para un usuario ocasional del ATP, esto repre-
senta una gran ventaja, porque se hace innesario conocer a detalle las reglas
de formato de datos.
4.4.1 Instalacion
Dado que se trata de una aplicacion nativa de Windows, ATPDRAW viene
con un instalador que se encarga del proceso. Por otra parte, congurar el
programa para que pueda llamar a ATP y un gracador es un poco mas
complicado. El proceso es el siguiente, asumiendo que se instala ATPDRAW
en el directorio
C:\ATP\ATPDRAW
y que se tiene la version MINGW32 de ATP:
1. Descomprimir los archivos de la distribucion de ATPDRAW.
2. Instalar ATPDRAW corriendo SETUP.EXE.
3. Especicar cual versi on de ATP ejecutar:
TOOLS --> OPTIONS --> PREFERENCES --> ATP
Asignar C:\ATP\ATPDRAW\RUNATP_G.BAT
ATP --> EDIT COMMANDS --> Run ATP (file)
Asignar C:\ATP\ATPDRAW\RUNATP_G.BAT
4. Especicar cual gracador ejecutar:
ATP --> EDIT COMMANDS --> Run PLOTXY
Asignar C:\ATP\VARIOS\PLOTXY.EXE
4.4. ATPDRAW 75
Los detalles pueden variar ligeramente, dependiendo de la version uti-
lizada, pero el proceso debe ser muy similar. Una vez terminada la cong-
uracion, ATPDRAW se puede utilizar como centro de control para las tres
etapas que componen un estudio interactivo: generacion del archivo, simu-
lacion y gracacion de los resultados.
4.4.2 Uso
Captura esquematica
Dado que es un programa basado en ventanas, ATPDRAW sigue las con-
venciones usuales y por lo tanto es facil de usar. Sin embargo, ATP es un
paquete complejo y por lo tanto la interacci on con ATPDRAW puede resultar
confusa para aquellos usuarios no familiarizados con ambos programas. Se
recomienda que el lector consulte el manual del usuario del ATPDRAW, el
cual viene con la distribucion del programa. Aqu solo apuntaremos algunos
conceptos basicos del manejo del ATPDRAW.
El programa tiene los componentes usuales: barra de men us, barra de
herramientas, barra de componentes, botones de vantanas. Se pueden tener
varios esquemas, cada uno en su ventana separada. Para editar el esquema,
se sigue el siguiente procedimiento:
Los componentes del modelo se insertan de un men u que aparece al pul-
sar el boton derecho del raton. Los componentes estan agrupados por
categoras (fuentes, elementos concentrados, interruptores, medidores).
Una vez seleccionado un componente del men u, este aparece en la ven-
tana de esquema, con una caja que indica que esta seleccionado. Se
puede arrastrar la caja para colocar el componente en la posicion de-
seada; para girar el componente se pulsa el boton derecho del raton.
Lneas de conexion entre nodos se trazan pulsando el raton encima del
nodo de origen y de nuevo en el nodo destino.
Los valores de los componentes se especican en un men u que aparece
dando doble pulso encima del smbolo del componente. Existe un boton
de ayuda que proporciona una explicacion acerca de los valores a jar.
Para los componentes de rama, se puede solicitar el reporte de voltaje,
corriente, ambos, potencia, energa o ambas, o bien utilizar medidores
dedicados.
76 CAP
ITULO 4. INTRODUCCI
ON AL ATP
Figura 4.4: Esquema del circuito RL-RL en ATPDRAW.
Los nombres de los nodos se pueden especicar dando doble pulso
encima del nodo. En el men u que aparece tambien se puede aterrizar
el nodo.
Un componente no visitado toma valores por omision, y aparece en
color rojo.
Un nodo no visitado toma nombre por omision y aparece en color rojo.
En la Figura 4.4 se muestra el esquema del circuito RL-RL tal y como
aparece en ATPDRAW.
Simulacion y analisis
Una vez completado el esquema de la red, estamos listos para simularla. Para
ello, se siguen una secuencia parecida a la siguiente:
Seleccionar el paso de integracion y el tiempo de paro, en el men u ATP
- Settings.
Generar el archivo de datos en el men u ATP - Make File As.
Opcionalmente, vericar y editar el archivo de datos en el men u ATP
- Edit ATP-le.
Llamar al simulador ATP en el men u ATP - run ATP.
4.4. ATPDRAW 77
Los mensajes aparecen en pantalla pero desaparecen rapidamente. Para
vericar que no haya errores en la simulacion, abrir el archivo de di-
agnostico con el men u ATP - Edit LIS-le.
Si la simulaci on termino exitosamente, examinar las variables de salida
con un gracador, con el men u ATP - PlotXY u otro que haya sido
agregado.
78 CAP
ITULO 4. INTRODUCCI
ON AL ATP
Parte III
Transitorios en redes de
parametros concentrados
79
Captulo 5
Modelado de componentes en
baja frecuencia
Es evidente que antes de poder llevar a cabo la simulacion de un evento
transitorio, debe de especicarse un modelo de los componentes que for-
man el sistema bajo estudio. Por ejemplo, debe representarse el punto de
alimentacion como una fuente ideal, o con una fuente con impedancia? y
como se calculan sus parametros en el segundo caso?
En este captulo se presentan algunos criterios para la determinacion de
los modelos a emplear. El enfasis de estos modelos es la simulaci on de tran-
sitorios de baja frecuencia, es decir en el rango de unos cuantos kHz, con el
objeto que nos sean utiles para el estudio de transitorios de conmutaci on.
Se consideran solamente algunos de los componentes de los sistema electri-
cos. Aparatos tales como transformadores y lneas de transmision se discuten
en captulos separados.
5.1 Modelo de la fuente
Tpicamente, un sistema de potencia contiene un gran n umero de generado-
res, transformadores y lneas de transmision. No es posible considerar con
detalle todos estos componentes, por lo que el sistema de potencia debe de
representarse mediante alg un modelo simplicado. El modelo mas simple es
una fuente ideal de voltaje, pero este modelo no es muy bueno puesto que
ignora el efecto de regulacion y el hecho de que la corriente de falla esta
limitada por la impedancia del sistema.
81
82CAP
ITULO5. MODELADODE COMPONENTES ENBAJAFRECUENCIA
5.1.1 Equivalente de Th`evenin
Un modelo un poco mas realista es el de un equivalente de Th`evenin, calcu-
lado a partir de un estudio de corto circuito de la siguiente forma. A partir
de la corriente de falla trifasica I
3
y monofasica I
1
, las impedancias de
secuencia del sistema estan dadas por [5]:
Z
+
=
1
I
3
,
Z
0
=
3
I
1
2
I
3
.
En cantidades de fase, se tendra que la impedancia del sistema es una matriz
de dimension 3x3 con terminos diagonales Z
s
y no diagonales Z
m
dados por
Z
s
=
1
3
(Z
0
+ 2Z
+
),
Z
m
=
1
3
(Z
0
Z
+
).
En consecuencia, la impedancia equivalente del sistema incluye acoplamiento
entre las fases. Tambien se observa que el equivalente es del tipo RL, es decir
toma en cuenta solamente la inductancia en el sistema.
5.1.2 Mejoras al modelo de equivalente de Th`evenin
Puesto que, en el modelo del sistema mediante el equivalente de Th`evenin,
el valor de las corrientes de falla se calcula a la frecuencia del sistema, la
impedancia as obtenida es valida solamente para esa frecuencia, y por lo
tanto no recomendable para estudios de transitorios. Sin embargo, el modelo
puede mejorarse con las consideraciones enumeradas enseguida.
Capacitancias
En el modelo del sistema mediante el equivalente de Th`evenin, se ignoran las
capacitancias presentes por efecto de lneas de transmision, cables, aislamien-
tos y otros elementos. A mayor frecuencia del transitorio, estas capacitancias
se tornan mas importantes; por lo tanto, un modelo mejorado consiste en
agregar las capacitancias de mayor magnitud que esten dispuestas en puntos
cercanos.
5.1. MODELO DE LA FUENTE 83
Es recomendable incluso modelar explcitamente las lneas largas o cables
inmediantamente atras del punto de estudio, y preferentemente mediante un
modelo de parametros distribudos en funcion de la frecuencia. Con esto la
capacitancia de tales elementos y su respuesta para transitorios de frecuencias
altas se toman en cuenta adecuadamente.
Lneas continuadas
Si una lnea de transmision parte del punto bajo estudio, pero conecta a
porciones radiales del sistema que no desean modelarse detalladamente, esa
porcion del sistema puede representarse mediante una resistencia a tierra, con
un valor igual al de la impedancia caracterstica de la lnea. De esta manera,
una parte de la energa del transitorio puede tomar este camino como hara
en la realidad.
Mejor a un, puede representarse a la lnea mediante su modelo de para-
metros distribudos y una terminacion resistiva igual a la impedancia carac-
terstica. Con esto la capacitancia de la lnea se toma en cuenta.
En ambos casos, se esta omitiendo el efecto de las ondas reejadas en
la carga conectada a la lnea, pero por otra parte el modelado se conserva
simple y compacto.
Resistencia por efecto piel
Es bien sabido que, debido al efecto piel, la resistencia efectiva de un conduc-
tor es una funcion de la frecuencia que transporta: a mayor frecuencia, mayor
resistencia. Por eso mismo, un modelo frecuentemente empleado consiste en
agregar una resistencia en paralelo a la impedancia de Th`evenin, de un valor
relativamente elevado.
Para bajas frecuencias, la impedancia de Th`evenin es mucho menor que la
resistencia en paralelo, por lo que practicamente solo inuye la primera. Por
otra parte, para altas frecuencias la impedancia de Th`evenin toma valores
elevados, y la resistencia en paralelo tiene mucho mayor inuencia.
Medicion de la respuesta a la frecuencia
La respuesta a la frecuencia del sistema puede determinarse mediante medi-
ciones con equipos especializados. Luego, esta respuesta se representa medi-
ante una red RLC sintetizada para reproducir estas mediciones.
84CAP
ITULO5. MODELADODE COMPONENTES ENBAJAFRECUENCIA
5.2 Modelo de la carga
Una manera de representar las cargas en un bus dado es mediante una rama
RL serie, puesto que por lo general las cargas son inductivas en los sistemas
electricos. Asumiendo que se conoce la potencia aparente S
L
y el factor de
potencia fp de la carga, as como su voltaje de lnea V
L
, la impedancia de la
carga esta dada por:
Z
L
=
V
2
L
S
L
acos(fp) (5.1)
para una carga conectada en Y. La resistencia R
L
y reactancia de carga X
L
son entonces las partes real e imaginaria de esta impedancia de carga:
R
L
= Re{Z
L
}, (5.2)
X
L
= Im{Z
L
}. (5.3)
La inductancia de carga es
L
L
=
X
L
2f
, (5.4)
donde f es la frecuencia del sistema.
Por ejemplo, considere una carga de 1MVA a 13.8KV, 60Hz, conectada
en Y, con un fp de 0.85 en atraso. Con estos datos, y aplicando las formulas
enunciadas en esta seccion, se tiene que resistencia de carga es 161.9, y su
inductancia 266.1mH.
5.2.1 Modelo de cargas compensadas
Frecuentemente se tienen cargas inductivas a las cuales se agrega un capacitor
para compensacion del factor de potencia. En ese caso, la carga RL se
modela seg un el procedimiento discutido arriba, pero se debe agregar una
rama capacitiva en paralelo con la carga. La capacitancia del banco se calcula
mediante las expresiones siguientes.
Considere una carga que demanda una potencia aparente S, y tiene un
factor de potencia fp
1
. Para corregir el factor de potencia a fp
2
, debe agre-
garse un capacitor con una potencia reactiva dada por:
Q = P(tg
1
tg
2
), (5.5)
donde
P = fp
1
S,
5.3. MODELADO DE BANCOS DE CAPACITORES 85
1
= acos(fp
1
),
2
= acos(fp
2
).
Por ejemplo, una carga de 200MVA con factor de potencia de 0.8 en
atraso, requiere un banco de capacitores de 67.3MVA para que el factor de
potencia se corrija a 0.95.
El valor as calculado para Q se emplea para determinar el valor de la
capacitancia. Los detalles de este procedimiento se discuten en la siguiente
seccion.
5.3 Modelado de bancos de capacitores
Un banco de capacitores se especica mediante la magnitud de la potencia
reactiva que proporciona (VARs), y el voltaje nominal. Ya sea que la po-
tencia reactiva se conozca a partir de los datos del sistema, o se calcule para
compensar el factor de potencia (seg un se discutio en la seccion precedente),
debemos determinar el valor efectivo de capacitancia del banco para nes de
ingreso de los datos en los programas de simulaci on.
Si S
3
es la potencia reactiva total de un banco trifasico de capacitores y
V
L
el voltaje de lnea nominal, entonces para una conexion en Y, la reactancia
capacitiva por fase esta dada por:
X
c
=
V
2
L
S
3
,
mientras que si la conexion es , esta dada por:
X
c
= 3
V
2
L
S
3
.
Se puede comprobar que estas dos expresiones se reducen a la expresion por
fase siguiente:
Z =
V
2
S
1
,
donde S
1
es la potencia reactiva por fase y V
es el voltaje de fase.
Una vez calculada la reactancia capacitiva, la capacitancia se determina
mediante
C =
1
X
c
.
86CAP
ITULO5. MODELADODE COMPONENTES ENBAJAFRECUENCIA
5.3.1 Resistencia de descarga
Ademas del elemento capacitivo, un modelo realista de un banco de capac-
itores debe incluir la resistencia de descarga. Esta resistencia se adiciona a
las unidades capacitivas con el n de permitir la descarga de las placas en
un tiempo razonable despues de que el banco haya sido desenergizado. Esta
descarga es requerida tanto por razones de seguridad como para evitar en
lo posible sobrevoltajes excesivos cuando se re-energiza con carga atrapada,
como se ver a cuando consideremos la energizacion de bancos de capacitores.
La resistencia de descarga obviamente debe ir colocada en paralelo con el
capacitor. Su valor puede determinarse a partir del tiempo especicado pra
completar la descarga. Para la combinacion RC en paralelo, la constante de
tiempo esta dada por
= RC
y t
descarga
= 5 es el tiempo requerido para eliminar la carga atrapada. En-
tonces, el valor requerido de resistencia esta dado por
R =
t
descarga
5C
.
Los tiempos de descarga especicados son del orden de minutos generalmente.
5.4 Apartarrayos
Un apartarrayos es un resistor no lineal dependiente del voltaje: para valores
de voltaje normales, este elemento presenta una resistencia muy elevada y
por lo tanto act ua practicamente como un circuito abierto. Para valores de
voltaje elevados, la resistencia disminuye apreciablemente y por lo tanto el
elemento act ua como un dren que conduce corriente a tierra (o entre sus dos
extremos) con una cada de tension muy baja. La intenci on es que de esta
forma la tension que aparece en el equipo que se esta protegiendo resulte
mucho menor que si no existiera el apartarrayos.
Existen varias conguraciones y tecnologas capaces de actuar de la man-
era descrita. Quizas el elemento de proteccion de sobrevoltajes mas simple
es un descargador de varillas. Un arreglo de punta - punta se coloca en el
equipo que se quiere proteger, por ejemplo una boquilla de transformador.
Cuando se presenta una sobretension, se establece un arco electrico externo
en el arreglo de varillas, dando por resultado que el voltaje aplicado al equipo
5.4. APARTARRAYOS 87
es el voltaje del arco, que idealmente toma valores bajos y por lo tanto pro-
tege al aparato contra sobretensiones. La desventaja de este enfoque es que
entonces se establece una falla a tierra, que puede autosostenerse (es decir,
el arco puede no extinguirse en el cruce por cero de la corriente). Entonces,
debe operar el esquema de proteccion contra fallas del sistema.
En vista de la dicultad se nalada, en la actualidad se utilizan resistores
no lineales para efectuar la proteccion contra sobretensiones. Historicamente,
el primer material usado con este proposito fue el carburo de silicio (SiC).
Este material tiene una cracterstica vi tal que no permite su uso continuo;
es decir, si se conectara directamente a la lnea, la corriente de estado estable
sera de magnitud inaceptable, lo cual podra dar lugar a la destruccion del
material. Para evitar la conduccion de corriente bajo voltajes normales y
posibilitar la conduccion cuando el voltaje se eleva, se utilizan explosores
(camaras de arqueo) en serie con el resistor no lineal. De esta manera, una
vez establecido el arco electrico cuando ocurre una sobretension, el resitor
no lineal controla el voltaje impreso en el equipo protegido. Una vez que
disminuye la sobretension, se deben tener medios para extinguir el arco y
aislar el resistor no lineal. La tecnologa que implica este tipo de apartar-
rayos es bastante compleja, porque se necesitan entre otras cosas resistores
graduadores para uniformizar la distribucion de potencial entre las secciones,
y las camaras de arqueo deben contar con medios para extinguir el arco.
Las dicultades se naladas para los apartarrayos de SiC se evitan recu-
rriendo a un material con una mayor no-linealidad. Este material es el oxido
de zinc (ZnO), el cual tiene una caracterstica v i mejorada que posibilita
la aplicacion del elemento directamente conectado a la lnea, es decir sin
necesidad de camaras de arqueo. Entonces el apartarrayos esta formado sim-
plemente por una columna de varistores encapsulados en un cuerpo aislante.
Esta tecnologa ha desplazado por completo a la de carburo de silicio, y en
la actualidad los apartarrayos pueden hacerse tan ligeros y delgados como
para ser usados incluso en la proteccion de lneas de transmision. Desde el
punto de vista de operacion, la estabilidad termica de apartarrayos de oxido
metalico es la principal limitante.
5.4.1 Modelado de apartarrayos de ZnO
Debido a su importancia tecnica, unicamente consideraremos el modelado de
apartarrayos de oxido de zinc. Para ello, debemos presentar la terminologa
usada por los fabricantes en su literatura tecnica.
88CAP
ITULO5. MODELADODE COMPONENTES ENBAJAFRECUENCIA
Tabla 5.1: Caracterstica v i para apartarrayos de 96kV.
v(kV ) i(A)
112 0.001
160 0.01
166.4 0.1
172.8 1.0
185.6 10
192 100
211.1 1000
249.6 10000
MOV (Metal Oxide Varistor) es una pastilla o disco que forma la unidad
basica con la que se construyen los apartarrayos. Este es el elemento re-
sistivo no lineal. Cuando se colocan varios varistores en serie (formando
una columna), se vara el voltaje nominal del apartarrayos.
MCOV (Maximum continuous operating voltaje) es el valor maximo
del voltaje que puede aplicarse al apartarrayos en operacion continua.
En caso de que el voltaje aplicado sea mayor que el MCOV, la corri-
ente drenada resultara excesiva y la unidad sufrira un colapso termico,
destruyendose.
El voltaje nominal es el maximo valor de tension para el cual el apartar-
rayos pasa la prueba de ciclo de trabajo. Tpicamente el voltaje nominal
es un poco mayor que el MCOV.
Por ejemplo, un apartarrayos con voltaje nominal de 96kV (rms), tiene un
MCOV de 76 kV (rms). Se empleara posiblemente en un sistema con un
voltaje de lnea de 115kV (para el cual la tension a tierra es 66kV, de modo
que se tienen 10kV de margen de seguridad para el MCOV).
La caracterstica de voltaje-corriente para los varistores es no lineal. Por
ejemplo, para el apartarrayos de 96kV, esta relacion es como se muestra en
la Tabla 5.1.
Se puede emplear esta relacion v i para cualquier apartarrayos de ZnO
de 96kV, sin importar el fabricante, pues las variaciones en los valores entre
un fabricante y otro son peque nas. Ademas, puesto que los valores de voltaje
5.4. APARTARRAYOS 89
nominal cambian seg un el n umero de varistores apilados en una unidad, se
pueden escalar los valores de la Tabla 5.1 para obtener las caractersticas
v i de otros apartarrayos con diferentes voltajes nominales; por ejemplo,
para obtener la curva de un apartarrayos con voltaje nominal de 12kV, se
dividen los voltajes de la tabla entre 8 (que resulta de dividr 96/12), dejando
las corrientes sin cambio.
90CAP
ITULO5. MODELADODE COMPONENTES ENBAJAFRECUENCIA
Captulo 6
Transitorios de conmutaci on
Un transitorio se inicia cuando ocurre un cambio s ubito en las condiciones
del circuito, frecuentemente debido a una operacion de cierre o apertura de
un interruptor. Muchos casos importantes de transitorios debidos a con-
mutacion pueden analizarse (o simularse) utilizando modelos de circuito de
parametros concentrados. Algunos de los casos mas comunes son el cierre de
un interruptor para energizar una carga o falla, y la apertura del interruptor
para despejarla [6]. Estos y otros casos se consideran en este captulo.
6.1 Energizacion de un circuito LR serie
Para el circuito mostrado en la Figura 6.1, la ecuacion de corriente es
Ri + L
di
dt
= V
m
sen(t + ). (6.1)
Este circuito puede representar la energizacion de un circuito de distribucion
donde la impedancia de la fuente mas la impedancia de la carga han sido
representadas por el resistor y el inductor en serie; el angulo se ha incluido
en la ecuacion para posibilitar el cierre en cualquier punto de la onda de
voltaje. El circuito tambien representa las condiciones que ocurren cuando
un interruptor cierra con falla presente en la lnea.
Usando fasores, el estado estable al nalizar el transitorio esta dado por
I =
V
Z
, (6.2)
Z = R + jL = (|Z|, ), (6.3)
91
92 CAP
ITULO 6. TRANSITORIOS DE CONMUTACI
ON
=
R
|Z|
=
R
R
2
+
2
L
2
, (6.4)
I =
V
m
|Z|
sen(t + ). (6.5)
La corriente, sin embargo, debe partir de cero (no puede existir una corriente
antes de cerrar el interruptor). Ademas, dado que se trata de un circuito
LR, la respuesta transitoria debe contener el termino exponencial e
R
L
t
. La
solucion de la ecuacion diferencial puede obtenerse usando la tranformacion
de Laplace, o mediante el metodo del factor integrante, quedando
i(t) =
V
m
R
2
+
2
L
2
sen(t + ) sen( )e
R
L
t
. (6.6)
Se observa que, efectivamente, se tiene la corriente de estado estable a la cual
se le suma un termino exponencial; la corriente inicia en cero. Debe notarse
que en el caso especial en que = el termino exponencial desaparece y se
tiene solamente la solucion de estado estable, es decir, no ocurre un transi-
torio. Por otra parte, si el interruptor cierra cuando =
2
, entonces
el termino transitorio alcanza su valor maximo y la corriente resultante es
cercana al doble de su magnitud de estado estable.
Como ejemplo, considere el caso de un sistema de 13.8kV cuando se cierra
un interruptor con falla de impedancia 0.02+j0.43. El valor pico de la
corriente depende del instante preciso en que se cierre el interruptor en la
onda de voltaje de la fuente. En la Figura 6.2, se muestran algunas de las
corrientes posibles. Para un angulo de cierre de 0 grados, la onda de corriente
es casi simetrica, y de hecho es difcil percibir la componente transitoria.
En cambio, para un angulo de cierre de 90 grados, la onda de corriente es
totalmente asimetrica; con esto se quiere decir que la onda esta desplazada en
1pu respecto al valor de estado estable. El desplazamiento va disminuyendo
exponencialmente, pero en los primeros picos de corriente se tienen valores
que son el doble de los picos en estado estable.
Esta condicion de doble corriente debe considerarse al especicar un in-
terruptor. Dado que en el caso trifasico los voltajes estan separados por
120
, hay una alta probabilidad de que tal condicion se presente en una de
las fases en cada operacion de cierre. El interruptor debe soportar los es-
fuerzos electricos, mecanicos y termicos resultantes. Por ejemplo, la fuerza
electromagnetica depende del cuadrado de la corriente, de manera que para
una corriente del doble del valor base se tiene una fuerza cuatro veces mayor.
6.1. ENERGIZACI
ON DE UN CIRCUITO LR SERIE 93
Vs
R
L
Figura 6.1: Energizacion de un circuito LR
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
5
4
3
2
1
0
1
2
3
x 10
4
Tiempo (s)
C
o
r
r
i
e
n
t
e
s
(
A
)
0
90
Figura 6.2: Corrientes de falla transitorias para un circuito de distribucion.
La magnitud de los primeros picos depende del instante de cierre.
Mas a un, si el interruptor recibe la orden de apertura bajo la condicion de
corriente asimetrica, resulta que la corriente efectiva que ha de interrumpir es
mayor que el valor de la corriente de falla de estado estable. La probabilidad
de que ocurran re-encendidos del arco es mayor en este caso.
La rapidez con que decae el termino transitorio depende de la constante
de tiempo del circuito =
L
R
. Es usual expresar esta relacion en terminos de
reactancia, y se habla entonces de la relacion
X
R
del circuito.
94 CAP
ITULO 6. TRANSITORIOS DE CONMUTACI
ON
6.2 Energizacion de capacitores
Es com un emplear bancos de capacitores para soporte de voltaje y correccion
del factor de potencia. Sin embargo, durante su energizacion puede ocurrir un
voltaje de hasta 3 veces el nominal (si existe carga atrapada de la polaridad
contraria), seg un se ha visto anteriormente. Para el circuito mostrado en la
Figura 6.3, que emplea una fuente de voltaje constante, se obtuvo la solucion
para el voltaje en el capacitor
v
c
= (V
0
V
s
)cos
0
t + V
s
, (6.7)
para v
c
(0) = V
0
. La corriente de energizacion del capacitor esta dada entonces
por
i
c
= C(V
0
V
s
)
0
sen
0
t =
C
L
(V
0
V
s
)sen
0
t. (6.8)
Esta expresion puede utilizarse para aproximar la solucion cuando el voltaje
de la fuente es de CA, dado que la frecuencia de la oscilacion
0
sera por lo
general mucho mayor que la frecuencia de operacion del sistema (60Hz). Por
ejemplo, para un banco trifasico de capacitores de 5MVAR a 13.8kV, en un
punto que tiene un nivel de falla de 20kA, la corriente nominal del banco de
capacitores es
I =
5 10
6
3 13, 800
= 209A, (6.9)
mientras que la inductancia de la fuente es:
X
L
=
13, 800
3 (20, 000)
= 0.4 (6.10)
L =
X
L
377
= 1.06mH. (6.11)
Por otra parte, la capacitancia de una unidad monofasica es
X
c
=
13, 800
3 209
= 38 (6.12)
C =
1
377 X
c
= 70F (6.13)
La frecuencia de la corriente de irrupcion esta dada por
0
=
1
LC
= 3681 rad/s, (6.14)
6.2. ENERGIZACI
ON DE CAPACITORES 95
(586Hz), lo cual justica el que se haya considerado constante el voltaje de
la fuente. La magnitud de esta corriente es (con V
s
maximo y V
0
nulo):
i
max
=
70 10
6
1.06 10
3
2(13, 800)
3
= 2896A, (6.15)
que es casi 14 veces la corriente nominal del banco de capacitores. Si existe
carga atrapada tal que V
0
= V
s
, la corriente maxima de de 5790A o casi
28 veces el valor nominal. En la practica, es requerimiento de norma que
los bancos de capacitores se descarguen en un lapso corto (5 minutos), y por
lo general se instalan controles de tiempo que evitan la re-energizacion del
banco hasta que haya transcurrido un lapso seguro. Tambien es com un el
uso de reactores que limitan la magnitud de la corriente de irrupcion.
En el analisis anterior, no se considero el efecto de la resistencia en el
circuito. Existe tanto una resistencia en serie con la fuente que es la de los
conductores de las lneas y el bus, como una resistencia en paralelo con el ca-
pacitor, que representa tanto las resistencias de descarga como la resistencia
de fuga del dielectrico. La resistencia serie tiene un valor dependiente de la
frecuencia, as que estrictamente es incorrecto asignarle un valor constante;
sin embargo, presentaremos un caso donde esto se asume.
Con los valores de voltaje, inductancia y capacitancia utilizados arriba,
agregamos una resistencia de la fuente de 0.02 y una resistencia en paralelo
con el capacitor de 100 (este ultimo valor no es necesariamente represen-
tativo). En las Figuras 6.4 y 6.5 se muestran el voltaje y la corriente de
irrupcion en el capacitor, cuando existe un voltaje inicial de polaridad o-
puesta a la de la fuente y el instante de cierre coincide con el pico positivo
de la fuente. La magnitud del sobrevoltaje esta de acuerdo al analisis sim-
plicado presentado arriba: es de tres veces el valor nominal; la componente
de alta frecuencia se puede percibir tambien.
La corriente tambien tiene una magnitud acorde con el analisis simpli-
cado. Las resistencias causan la atenuaci on de la componente de alta fre-
cuencia. Como se ha dicho, el valor asignado a la resistencia del capacitor
puede no ser representativo; esto signica que el tiempo de amortiguamiento
puede a su vez no serlo, pero el comportamiento general es el esperado
Las Figuras 6.6 y 6.7 muestran el comportamiento cuando se agrega un
reactor de 10mH en serie con el banco de capacitores a energizar. La fre-
cuencia del transitorio disminuye como es de esperar, y la magnitud de la
corriente es ahora mucho mas favorable, alrededor de 4 veces en el peor caso
96 CAP
ITULO 6. TRANSITORIOS DE CONMUTACI
ON
Vs
L
C
Figura 6.3: Circuito simplicado para energizacion de capacitor.
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
3
2
1
0
1
2
3
4
x 10
4
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Figura 6.4: Voltaje de energizacion en el capacitor.
(comparado com 28 veces sin reactor). Con menor frecuencia, el primer pico
del voltaje alcanza 2.5pu, en lugar de 3pu, pero la adicion del reactor es
claramente mas efectiva para reducir la corriente de irrupcion que el voltaje
en el capacitor.
6.2.1 Energizacion de segunda etapa de capacitores
Es com un encontrar que el banco de capacitores esta dividido en dos eta-
pas. Para el ejemplo anterior, considerando que existe una segunda etapa
de 5MVAR y que la inductancia entre los dos bancos es 30H, e ignorando
inicialmente el efecto de la fuente, se tendra el circuito mostrado en la Figura
6.2. ENERGIZACI
ON DE CAPACITORES 97
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
6000
4000
2000
0
2000
4000
6000
Tiempo (s)
C
o
r
r
i
e
n
t
e
(
A
)
Figura 6.5: Corriente de energizacion en el capacitor.
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
3
2
1
0
1
2
3
x 10
4
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Figura 6.6: Voltaje de energizacion en el capacitor con reactor limitador.
98 CAP
ITULO 6. TRANSITORIOS DE CONMUTACI
ON
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
2000
1500
1000
500
0
500
1000
1500
2000
Tiempo (s)
C
o
r
r
i
e
n
t
e
(
A
)
Figura 6.7: Corriente de energizacion en el capacitor con reactor limitador.
6.8. La capacitancia equivalente es
C =
C
1
C
2
C
1
+ C
2
= 35F. (6.16)
Si C
1
esta cargado al voltaje maximo al energizar C
2
, la corriente maxima
de irrupcion en este ultimo y su frecuencia son
i =
35 10
6
30 10
6
2 (13, 800)
3
= 12.1kA, (6.17)
0
=
1
35 30 10
12
= 30, 800 rad/s (6.18)
(4.9kHz). El efecto de tales corrientes de magnitud y frecuencia elevadas
puede ser severo en cuanto a los esfuerzos mecanicos, induccion en circuitos
vecinos, malfuncionamiento de esquemas de control o proteccion, etc. Ya se
dijo que para evitarlas puede agregarse un reactor en serie para limitar tanto
la magnitud como la frecuencia.
Otra alternativa es recurrir al cierre sincronizado del interruptor; la idea
es que si el interruptor cierra cuando el voltaje a traves de sus contactos
es cero, entonces no ocurre el transitorio de voltaje y corriente. Se requiere
una operacion muy conable y tiempos de cierre consistentes, algo que pocos
interruptores cumplen.
6.2. ENERGIZACI
ON DE CAPACITORES 99
Consideramos ahora el efecto de la fuente en la energizacion del segundo
banco de capacitores. Dado que la inductancia entre los dos bancos de capac-
itores es tan reducida comparada con la inductancia de la fuente, el transi-
torio entre bancos es mucho mas rapido y los dos bancos alcanzan un voltaje
com un que se obtiene despejando de la expresion
C
1
V
1
+ C
2
V
2
= (C
1
+ C
2
)V
. (6.19)
En nuestro caso, V
= 5, 633V. Se inicia entonces un segundo transitorio que
llevara a este voltaje com un al nivel de voltaje de la fuente, para el cual la
corriente maxima y su frecuencia estan dadas por
i =
140 10
6
1.06 10
3
5, 633
3
13, 800
= 2kA (6.20)
0
=
1
1.06 10
3
140 10
6
= 2596 rad/s (6.21)
(413Hz). Note que esta segunda frecuencia es mucho menor que 4.9kHz, por
lo que es valido separar el analisis en dos partes: el primer transitorio sucede
mucho mas rapido y el segundo contin ua en una escala de tiempo mayor.
En la Figura 6.9 se muestra el voltaje en el primer capacitor al energizar la
segunda etapa. El voltaje de la segunda etapa es practicamente igual, salvo
por peque nsimas diferencias explicadas por la resistencia e inductancia que
separa ambas etapas. A la onda de frecuencia del sistema s ubitamente se le
superpone el transitorio rapido inicial; la escala de tiempo es tal que es difcil
determinar la frecuencia a partir de la graca. El voltaje de alta frecuencia
se resta del voltaje fundamental porque la carga almacenada en el primer
capacitor se empieza a transferir al segundo; por esta razon el pico es menos
severo. La segunda frecuencia transitoria tambien puede apreciarse.
Por su parte, la corriente de irrupcion en el segundo capacitor es como
se muestra en la Figura 6.10. Aunque el transitorio de voltaje no fu tan
severo, el de corriente si lo es: se alcanza una magnitud de mas del doble de
corriente comparado con la energizacion del primer banco, y la frecuencia ya
se vio que es muy alta; esto implica mayores posibilidades de interferencia
con circuitos cercanos, incluidos los circuitos de control y proteccion.
Es interesante observar que la corriente de alta frecuencia de irrupcion
en el segundo banco esta limitada al tramo que conecta ambas etapas. Es
decir, esta corriente no se propaga a la fuente, seg un se aprecia en la Figura
100 CAP
ITULO 6. TRANSITORIOS DE CONMUTACI
ON
C1 C2
L12
Figura 6.8: Circuito reducido (se desprecia inicialmente el efecto de la fuente)
para energizacion de segunda etapa capacitiva.
0 0.005 0.01 0.015 0.02 0.025 0.03
2.5
2
1.5
1
0.5
0
0.5
1
1.5
2
x 10
4
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Figura 6.9: Voltaje en los capacitores al energizar segunda etapa.
6.11. Solo la segunda componente de frecuencia transitoria es observable en
la fuente.
Conviene examinar el mismo caso cuando se usan reactores limitadores.
Si cada etapa de capacitores tiene un reactor de 5mH en serie, los resultados
son como los presentados en las Figuras 6.12 y 6.13. En este casso existe so-
lamente una frecuencia transitoria la cual es mucho menor. Las magnitudes
de los voltajes a tierra en el reactor apenas crecen, aunque contienen compo-
nentes de frecuencia transitoria. En los capacitores, sin embargo, el voltaje
alcanza 2pu. La corriente sigue siendo elevada respecto al valor nominal, con
valores en la escala de kA.
6.2. ENERGIZACI
ON DE CAPACITORES 101
0 0.005 0.01 0.015 0.02 0.025 0.03
1.5
1
0.5
0
0.5
1
1.5
x 10
4
Tiempo (s)
C
o
r
r
i
e
n
t
e
(
A
)
Figura 6.10: Corriente de irrupcion en la segunda etapa del banco de capac-
itores.
0 0.005 0.01 0.015 0.02 0.025 0.03
3000
2000
1000
0
1000
2000
3000
Tiempo (s)
C
o
r
r
i
e
n
t
e
(
A
)
Figura 6.11: Corriente en la fuente al energizar segunda etapa de banco de
capacitores.
102 CAP
ITULO 6. TRANSITORIOS DE CONMUTACI
ON
0 0.005 0.01 0.015 0.02 0.025 0.03
2.5
2
1.5
1
0.5
0
0.5
1
1.5
2
2.5
x 10
4
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Vc1
Vr
Vc2
Figura 6.12: Voltaje a tierra de los capacitores y uno de los reactores al
energizar segunda etapa.
0 0.005 0.01 0.015 0.02 0.025 0.03
2000
1500
1000
500
0
500
1000
1500
2000
Tiempo (s)
C
o
r
r
i
e
n
t
e
(
A
)
Is
Ic1
Ic2
Figura 6.13: Corriente en la fuente y en los capacitores (y reactores) al
energizar segunda etapa.
6.3. INTERRUPCI
ON DE UN CORTO CIRCUITO 103
6.3 Interrupcion de un corto circuito
El llamado voltaje de recobro tiene gran importancia para la extincion exitosa
del arco electrico en un interruptor. El arco se establece cuando los contactos
se separan, y solo se extingue en uno de los cruces por cero de la onda de
corriente alterna. El circuito de la Figura 6.14 modela el proceso; R
f
es la
resistencia de falla, C es la capacitancia dispersa del interruptor y equipo
contiguo, y v
a
el es el voltaje del arco. Para v
a
= 0 y R
f
= 0 (voltaje de arco
y resistencia de falla despreciables), el circuito equivalente al momento de
ocurrir la falla es puramente inductivo; entonces, cuando se presente el cruce
por cero de la corriente, el voltaje de la fuente esta en su punto maximo.
Como resultado, la ecuacion de corriente es
L
di
dt
+ v
c
= V
m
cost. (6.22)
Sustituyendo la ecuacion de corriente en el capacitor, se llega a
d
2
v
c
dt
2
+
1
LC
v
c
=
V
m
LC
cost, (6.23)
con condiciones iniciales v
c
(0) = 0, v
c
(0) = 0. La solucion es
v
c
=
2
0
2
0
2
V
m
(cost cos
0
t) , (6.24)
donde es la frecuencia angular de la fuente de alimentacion y
0
= 1/
LC
es la frecuencia angular natural del circuito LC. Como
0
, la anterior
expresion se simplica a
v
c
V
m
(cos t cos
0
t) . (6.25)
Mas a un, si la atencion se restringe al periodo cercano al inicio del transitorio,
es decir el que sigue a la interrupcion, se tiene
v
c
V
m
(1 cos
0
t) . (6.26)
v
c
es el voltaje que aparece entre los contactos del interruptor y se denomina
Voltaje Transitorio de Recobro (en ingles, Transient Recovery Voltage,
TRV). Se puede ver que este se acerca al doble del valor pico del voltaje de
la fuente.
104 CAP
ITULO 6. TRANSITORIOS DE CONMUTACI
ON
En la Figura 6.15 se muestra el TRV resultante con los datos mencionados
arriba, mas una resistencia de la fuente de 0.02 y una resistencia de fuga
del interruptor de 50,000 . Estas resistencias son las responsables de la
atenuacion.
Cuanto menor sea el producto LC, mayor sera la frecuencia de la os-
cilacion. Tanto as que si el voltaje entre contactos del interruptor aumenta
mas rapidamente que el incremento de la la rigidez dielectrica en el medio
interelectrodico, se produce una descarga llamada re-ignicion del arco, lo
cual resulta en que la corriente de falla persiste por lo menos otro medio
ciclo (cuando ocurre otro cruce por cero de la corriente). Para cuanticar
esta condicion se usa el termino Razon de Aumento del Voltaje de Recobro
(Rate of Rise of Recovery Voltage, RRRV).
Esta es una cantidad asociada con
el circuito y da una medida de la severidad del transitorio que debe soportar
el interruptor. Por ejemplo, si L =1mH, C =400pF y v
s
= 13, 800 cos t:
0
= 1.58 10
6
, (6.27)
f
0
=
0
2
= 252KHz, (6.28)
T
0
=
1
f
0
= 4s. (6.29)
Para estos datos, el RRRV es
RRRV =
13, 800
3 10
6
= 11.25
kV
s
, (6.30)
que es un requerimiento muy severo para el interruptor.
En el analisis precedente, se asumio que se esta interrumpiendo una corri-
ente simetrica. Si este no es el caso, entonces el cruce por cero de la onda de
corriente no ocurre con voltaje maximo, por lo que el transitorio de voltaje
(TRV) es un poco menor. En la Figura 6.16 se ilustra el fenomeno; se ob-
serva que el TRV esta desplazado en -4kV aproximadamente, y por lo tanto
el RRRV sera un poco menor. Entonces, desde el punto de vista del voltaje
de recobro, la interrupcion con corriente asimetrica es menos demandante
para el interruptor. Esto se ve compensado, sin embargo por la mayor mag-
nitud de la corriente, que causa una mayor temperatura del arco previa a la
interrupcion.
6.3. INTERRUPCI
ON DE UN CORTO CIRCUITO 105
Vs
L
C R
+ -
Va
Figura 6.14: Modelo de circuito para apertura de interruptor.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 10
4
2.5
2
1.5
1
0.5
0
0.5
1
1.5
x 10
4
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Vs
TRV
10xIb
Figura 6.15: Voltaje de recobro en el interruptor, comparado con el voltaje
de la fuente. La corriente en el interruptor se muestra tambien, escalada por
un factor de 10.
106 CAP
ITULO 6. TRANSITORIOS DE CONMUTACI
ON
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016
6
5
4
3
2
1
0
1
2
3
x 10
4
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Vs
TRV
Ib
Figura 6.16: Voltaje de recobro en el interruptor, cuando se interrumpe
corriente asimetrica.
6.3.1 Conmutacion con resistores
Algunos interruptores emplean resistores en paralelo con los contactos princi-
pales para limitar el voltaje transitorio. El mecanismo que se explota es el de
introducir amortiguamiento en el circuito para hacer menos severo el voltaje
de recobro. Por otra parte, en interruptores multic amara puede emplearse
resistores para distribuir uniformemente el voltaje entre etapas. El esquema
de un circuito cuando se emplea un resistor derivado se presenta en la Figura
6.17.
La operacion de interrupcion de corriente inicia cuando se abren los con-
tactos principales. Debido a la presencia de la resistencia auxiliar, la cual en
ese momento esta en paralelo con la capacitancia dispersa del interruptor,
el voltaje de recobro es menor que el que se presentara sin resistor de con-
mutacion. Se observa que se hace necesario emplear un interruptor auxiliar
para retirar la resistencia de conmutacion despues de un tiempo; la apertura
de los contactos auxiliares no origina un transitorio de recobro porque en este
caso el circuito se vuelve predominantemente resistivo y en el instante de la
apertura tanto el voltaje de la fuente como la corriente estan cruzando por
cero.
El mismo circuito cuyo TRV se presento en la Figura 6.15 tiene, si se
agrega un resistor de conmutacion de 2k, el TRV presentado en la Figura
6.4. DESENERGIZACI
ON DE CARGA INDUCTIVA 107
6.18 para el caso de interrupcion de corriente simetrica. La escala de tiempo
es menor en esta segunda graca, y una comparacion de ambos TRV muestra
que en el segundo caso la magnitud se ha reducido de 22kV a 14kV. La razon
es que la energa del capacitor, que antes se transfera a la inductancia de
la fuente y por ello alcanzaba un valor de 2pu, ahora se comparte con el
resistor, el cual la disipa y en el proceso limita el valor del voltaje alcanzado.
El amortiguamiento es muy rapido: solo se observan un ciclo del transitorio
de recuperacion.
Esta no es toda la historia, sin embargo, porque a un ha de abrirse el inter-
ruptor auxiliar para desconectar el interruptor de conmutaci on del circuito.
El transitorio completo se muestra en la Figura 6.19. La oscilacion del primer
transitorio es apenas perceptible en esa escala de tiempo y parece mas bien
una lnea vertical o pulso en t=0.00265s. Una vez que se ha amortiguado este
primer transitorio el TRV toma el valor del voltaje de la fuente. El segundo
juego de contactos abre y la corriente se interrumpe al cabo de medio ciclo.
Esta vez, sin embargo, el voltaje en el capacitor es nulo y por lo tanto no
ocurre un transitorio de recobro.
El valor del resistor de conmutacion determina la magnitud del TRV.
Dado que la capacitancia dispersa y el resistor de conmutacion forman un
circuito RC en paralelo, su constante de tiempo es = RC, por lo que
a menor resistencia corresponde un amortiguamiento mas rapido y por lo
mismo un menor TRV.
En la Figura 6.20 se presenta la corriente que debe conducir el resistor
de conmutacion. En la etapa de dise no, cuando se dimensiona el resistor
de conmutaci on, es importante considerar el comportamiento de la poten-
cia y energa disipadas en el resistor de conmutaci on. Estas cantidades se
presentan en las Figuras 6.21 y 6.22.
6.4 Desenergizacion de carga inductiva
Cuando se abre una carga inductiva, se puede emplear como modelo el cir-
cuito mostrado en la Figura 6.23, donde L
1
es la inductancia de la fuente,
C
1
y C
2
son las capacitancias dispersas en el lado de la fuente y en el lado
de la carga, respectivamente, y L
2
es la inductancia de la carga. El mismo
circuito se presenta cuando se desenergiza un transformador sin carga, en
cuyo caso C
2
representa la capacitancia del devanado y L
2
la inductancia de
magnetizacion.
108 CAP
ITULO 6. TRANSITORIOS DE CONMUTACI
ON
Vs
L
C R
Ra Sa
S
Figura 6.17: Modelo de circuito para apertura con resistor de conmutacion.
2.63 2.632 2.634 2.636 2.638 2.64 2.642 2.644 2.646 2.648 2.65
x 10
3
2.5
2
1.5
1
0.5
0
0.5
x 10
4
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Vs
TRV
Is
Figura 6.18: Voltaje de recobro en el interruptor con resistor de conmutacion:
apertura de los contactos principales.
6.4. DESENERGIZACI
ON DE CARGA INDUCTIVA 109
0 1 2 3 4 5 6 7 8
x 10
3
15000
10000
5000
0
5000
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Vs
TRV
Figura 6.19: Voltaje de recobro en el interruptor con resistor de conmutacion:
transitorio completo.
0 1 2 3 4 5 6 7 8
x 10
3
8
7
6
5
4
3
2
1
0
Tiempo (s)
C
o
r
r
i
e
n
t
e
(
A
)
Figura 6.20: Corriente en el resistor de conmutaci on.
110 CAP
ITULO 6. TRANSITORIOS DE CONMUTACI
ON
0 1 2 3 4 5 6 7 8
x 10
3
0
1
2
3
4
5
6
7
8
9
10
x 10
4
Tiempo (s)
P
o
t
e
n
c
i
a
(
W
)
Figura 6.21: Potencia disipada en el resistor de conmutaci on.
0 1 2 3 4 5 6 7 8
x 10
3
0
50
100
150
Tiempo (s)
E
n
e
r
g
i
a
(
J
)
Figura 6.22: Energa disipada en el resistor de conmutaci on.
6.4. DESENERGIZACI
ON DE CARGA INDUCTIVA 111
Vs
L1
C1 C2 L2
Figura 6.23: Modelo de circuito para desconexion de carga inductiva
En el estado estable (con la carga energizada), el voltaje en los capacitores
esta dado por
L
2
L
1
+ L
2
v
s
, (6.31)
(las capacitancias son muy peque nas y se desprecian en esta expresion). Pero
como L
2
L
1
, ambos capacitores estan cargados a un voltaje cercano al de
la fuente v
s
antes de la apertura del interruptor. Tambien, dado que la carga
es inductiva, cuando se alcanza un cruce por cero de la corriente, el voltaje
de la fuente es maximo. Cuando el arco se extingue en el interruptor, las
dos mitades del circuito evolucionan de manera independiente. En el lado
de la fuente, C
1
y L
1
forman un circuito LC independiente que oscila a la
frecuencia
1
=
1
L
1
C
1
, (6.32)
mientras que en el lado de la carga la oscilacion es a frecuencia
2
=
1
L
2
C
2
. (6.33)
El voltaje entre contactos en el interruptor es la diferencia entre los volta-
jes en los capacitores. Para el caso usual en que
1
>
2
, se tiene la situacion
ilustrada en las Figuras 6.24 y 6.25. El voltaje nal en C
1
es el de la fuente,
mientras que en el lado de la carga el voltaje nal es cero. El TRV alcanza
un poco menos de 2pu, pero el tiempo en el que lo hace esta dado por la
frecuencia del transitorio en el lado carga; asumiendo que se trata de la de-
senergizacion de un transformador, esta frecuencia no es tan elevada porque
tanto la capacitancia como la inductancia en el lado secundario son relativa-
mente altas. Entonces, el RRRV no alcanza valores elevados.
112 CAP
ITULO 6. TRANSITORIOS DE CONMUTACI
ON
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016
1.5
1
0.5
0
0.5
1
1.5
x 10
4
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Vc1
Vc2
Figura 6.24: Voltaje en los capacitancias del lado fuente y lado carga cuando
se desenergiza una carga inductiva
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016
1.5
1
0.5
0
0.5
1
1.5
2
2.5
x 10
4
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
TRV
Vs
Figura 6.25: Voltaje de la fuente y de recobro cuando se desenergiza una
carga inductiva
6.5. CORTE DE CORRIENTE 113
Vs
Figura 6.26: Modelo de circuito para desconexion de carga inductivo-resistiva
6.4.1 Desenergizacion de cargas CLR
En muchos casos una carga electrica se puede representar mediante un cir-
cuito RL serie o paralelo paralelo; a menor factor de potencia de la carga mas
predominara la inductancia. Cuando la carga se desconecta, su capacitancia
efectiva determina la forma del transitorio generado. La capacitancia en el
circuito puede ser dispersa o representar un banco de correccion del factor
de potencia; en cualquier caso, un circuito que modela el proceso es como
el mostrado en la Figura 6.26. Un caso que cae dentro de esta categora es
el de un horno de arco electrico, el cual puede representarse mediante una
combinacion serie de resistencia e inductancia, mientras que la capacitancia
en paralelo sera la debida al banco de capacitores usado para correccion del
factor de potencia.
La respuesta del circuito es similar a la del lado secundario en las Figuras
6.24 y 6.25. Es decir, el voltaje y la corriente se amortiguan hasta cero con
una frecuencia determinada por L y C, y el TRV es la diferencia entre el
voltaje de la fuente y el voltaje del lado de la carga. Un valor cercano a 2pu
resulta tambien.
Para una carga puramente resistiva, el voltaje y la corriente van en fase
y no ocurre un transitorio
6.5 Corte de corriente
En el proceso de apertura de un interruptor, a un cuando los contactos se sep-
aran la corriente electrica contin ua uyendo en la forma de un arco electrico,
el cual es extinguido mediante alg un proceso fsico tal como elongacion, en-
friamiento, etc. Idealmente, el arco se extingue cuando la onda de corriente
alterna cruza por cero; sin embargo, en algunos casos el proceso de extincion
114 CAP
ITULO 6. TRANSITORIOS DE CONMUTACI
ON
del arco es tan eciente que la corriente es interrumpida abruptamente antes
del cruce por cero. A esta interrupcion prematura se le llama corte de cor-
riente y puede originar un sobrevoltaje en ciertos casos como por ejemplo
cuando se interrumpe la corriente de magnetizacion de un transformador sin
carga, o cuando se desconecta un reactor e derivacion.
La caracterstica fundamental de tales fenomenos es que existe una energa
almacenada en forma de campo magnetico, dada por
W
m
=
1
2
L
m
i
2
. (6.34)
Si al momento de abrir el interruptor se presenta una supresion de corriente,
esta energa debe ser liberada a traves de la capacitancia y resistencia del
circuito del lado de la carga porque la corriente en el inductor no puede cesar
s ubitamente. El circuito de la Figura 6.26 ilustra los elementos del caso.
La corriente proveniente del inductor cargara al capacitor. Asumiendo
que la resistencia R es muy grande, se puede estimar el voltaje maximo
alcanzado por por el capacitor, el cual ocurre cuando toda la energa del
circuito reside en el campo electrico del capacitor:
1
2
L
m
i
2
=
1
2
Cv
2
(6.35)
v =
L
m
C
i. (6.36)
Consideremos un caso especco. Para un transformador de 1MVA, 13.8kV
con corriente de magetizacion de 1.5A (RMS) y capacitancia 5000pF, la in-
ductancia de magnetizacion es
L
m
=
V
I
m
=
13, 800
3 377 1.5
= 14H, (6.37)
por lo que el voltaje maximo en el capacitor puede estimarse como
v
MAX
=
14
5 10
9
2 1.5 = 112kV. (6.38)
asumiendo que se ha suprimido la corriente de magnetizacion en el pico. Note
cuan elevado es este voltaje para un sistema de 13.8kV. En realidad este valor
tan alto no se alcanza porque la resistencia (perdidas) del circuito originan
6.5. CORTE DE CORRIENTE 115
un amortiguamiento, ademas de que el fenomeno de histeresis en el n ucleo
del transformador limita la energa que puede ser liberada (el resto se disipa
en forma de perdidas en el n ucleo). Para el ejemplo anterior, suponiendo que
la energa liberada no excede a 30% de la energa almacenada, se tendra que
el voltaje alcanzado es
v
MAX
=
14
5 10
9
0.3
2 1.5 = 61kV. (6.39)
Debe notarse que la magnitud del sobrevoltaje es independiente del voltaje de
operacion del sistema. La probabilidad de da no al transformador es mayor
para sistemas de distribucion, dado que el nivel de aislamiento es menor
(relativo al voltaje del sistema).
El factor
L
m
/C aparece en la expresion del sobrevoltaje. Si C es grande,
el sobrevoltaje es menor (por ejemplo para una longitud de cable). Si L
m
es
baja, el sobrevoltaje es menor (por ejemplo para una maquina rotatoria).
En el analisis simplicado que se ha presentado no se ha tomado en cuenta
que existe amortiguamiento debido a la resistencia de los conductores, con-
ductancia de los aislamientos y perdidas por histeresis en el n ucleo ferro-
magnetico. Por lo mismo, el valor del sobrevoltaje que se observa en un caso
mas real es menor que el maximo predicho por el analisis simplicado. Con-
siderando el mismo ejemplo presentado arriba, pero esta vez con la adicion
de un resistor en paralelo que representa las perdidas en el n ucleo del trans-
formador, el circuito equivalente es el mismo que el mostrado en la Figura
6.26. El valor del resistor correspondiente es de 25k; este valor se obtiene
midiendo el factor de potencia de la corriente de magnetizacion. Suponiendo
que el interruptor corta la corriente pico de magnetizacion, se obtienen las
magnitudes mostradas en la Figura 6.27 (la corriente se muestra escalada
por un factor de 10
4
). Se observa que el voltaje en el capacitor alcanza un
valor de alrededor de 35kV, que es mucho menos de los que predice el analisis
simplicado, pero a un de magnitud importante. El TRV es un poco mayor
(40kV) debido a que se le suma el voltaje del lado de la fuente. Hemos visto
que en operaciones de apertura de un circuito con falla, el TRV puede al-
canzar 2 veces el voltaje pico del sistema. En el caso ilustrado de corte de
corriente, el TRV alcanza cerca de 4 veces el voltaje pico del sistema; sin
emabrgo, lo hace con frecuencia mucho mas reducida y por lo mismo el valor
RRRV puede no resultar tan severo.
El valor del sobrevoltaje desarrollado depende de la magnitud de la co-
rriente cortada. Para la conguracion que hemos discutido, cuando el valor
116 CAP
ITULO 6. TRANSITORIOS DE CONMUTACI
ON
0 1 2 3 4 5 6 7 8
x 10
3
4
3
2
1
0
1
2
3
4
x 10
4
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Vs
Vc
TRV
Ix10
4
Figura 6.27: Voltajes transitorios cuando el interruptor corta una corriente
de 2.12A
de la corriente cortada es la mitad de la corriente pico de magnetizacion,
los voltajes son un poco menores, seg un se aprecia en la Figura 6.28. En
este caso, dado que la corriente interrumpida es menor, la onda de voltaje
ya ha llegado al semiciclo negativo y por lo mismo el TRV es menor (porque
el voltaje de la fuente se resta al del capacitor). El voltaje en el capacitor,
que es el que aparece en terminales del transformador, es ahora el de mayor
magnitud, alcanzando alrededor de 27kV.
6.6 Re-ignicion
En una seccion anterior se considero el voltaje que aparece entre contactos en
un interruptor cuando se abre un circuito, al cual se le denomina voltaje de
recobro (TRV). La rapidez con la que este voltaje alcanza su valor pico debe
ser menor que la de recuperacion de la capacidad aislante en el espacio entre
contactos; es decir, el RRRV debe ser menor que un valor dado. Cuando
la rapidez de aumento del voltaje de recobro excede al valor de dise no del
interruptor, es casi seguro que un arco electrico se establece nuevamente. Es
decir, la interrupcion no es exitosa y se tiene lo que se conoce como una
re-ignicion o re-encendido. En esta seccion se consideran las consecuencias
de tal fenomeno para cargas capacitivas e inductivas.
6.6. RE-IGNICI
ON 117
0 0.002 0.004 0.006 0.008 0.01 0.012
3
2.5
2
1.5
1
0.5
0
0.5
1
1.5
2
x 10
4
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Vs
Vc
TRV
Ix5x10
3
Figura 6.28: Voltajes transitorios cuando el interruptor corta una corriente
de 1.06A
6.6.1 Re-ignicion al desconectar capacitores
Cuando se desconectan cargas capacitivas (por ejemplo cables o lneas aereas
sin carga, bancos de correcion de factor de potencia, etc.) puede presen-
tarse un escalamiento de voltaje si el interruptor re-enciende. Aunque la
probabilidad de que esto ocurra es baja, es necesario considerarla porque la
conmutacion de capacitores es una operacion frecuente.
Consideremos primeramente una operacion exitosa de interrupcion de
corriente capacitiva. Puesto que la corriente capacitiva adelanta al voltaje
de 90
, cuando se interrumpe la corriente (en el cruce por cero), el capacitor
queda cargado al voltaje pico de la fuente. El voltaje en el capacitor en estado
estable es un poco mayor que el de la fuente debido al efecto Ferranti. Por su
parte, el voltaje entre contactos del interruptor alcanza un valor de 2V
MAX
medio ciclo despues (Figura 6.29). Si este voltaje es suciente para provocar
una re-ignicion del arco, esto equivale a energizar el capacitor con carga
atrapada; ya conocemos las expresiones para la frecuencia y magnitud de la
corriente oscilatoria que resulta. Mas a un, el voltaje transitorio se acerca a 3
veces el voltaje pico del sistema si la re-ignicion ocurre en V
MAX
. La secuencia
se muestra en la Figura 6.30, en la que no se ha incluido la interrupcion del
segundo arco. Sin embargo, ya que el interruptor se encuentra en la posicion
abierto y hubo un re-encendido, existe una alta probabilidad de que se logre
una segunda exticion del arco en alguno de los cruces por cero de la corriente
118 CAP
ITULO 6. TRANSITORIOS DE CONMUTACI
ON
0 0.005 0.01 0.015 0.02 0.025 0.03
2
1.5
1
0.5
0
0.5
1
1.5
2
2.5
x 10
4
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Vs
Ix50
Vc
TRV
Figura 6.29: Voltajes transitorios para una apertura exitosa de un banco de
capacitores.
de irrupcion del capacitor. Asumiendo que esta interrupcion ocurre en el
cruce por cero inmediato posterior al re-encendido, se presenta una secuencia
como la mostrada en la Figura 6.31.
En este caso, el TRV es a un mas severo, seg un se desprende de la Figura
6.32. El TRV para la primera extincion del arco es de alta frecuencia pero
su magnitud es tan reducida que no se alcanza a apreciar en la Figura. La
razon es que el voltaje del capacitor es practicamente igual al de la fuente
cuando se inicia el transitorio. En cambio, para la segunda extincion del arco
el voltaje del capacitor es sustancialmente distinto al de la fuente porque
el transitorio de re-energizacion del capacitor a un no ha concludo. Como
resultado, el segundo TRV es mucho mas severo que el primero y eso aumenta
las posibilidades de que ocurra un segundo re-encendido, y as sucesivamente,
con voltajes en el capacitor cada vez mayores. Te oricamente es posible que el
proceso descrito se repita indenidamente, resultando en voltajes de niveles
cada vez mayores, hasta el punto en que se da ne el capacitor o el interruptor,
u ocurra un arqueo externo.
6.6.2 Re-ignicion al desconectar inductores
En la seccion anterior se considero el caso en el que el interruptor re-enciende
al desconectar un banco de capacitores. Dado que el TRV en la primera
6.6. RE-IGNICI
ON 119
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
4
3
2
1
0
1
2
3
4
x 10
4
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Vs
Ix50
Vc
TRV
Figura 6.30: Voltajes transitorios para una apertura y reignicion de un banco
de capacitores.
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
1.5
1
0.5
0
0.5
1
1.5
2
2.5
3
3.5
x 10
4
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Vs
Vc
Icx5
Figura 6.31: Voltajes transitorios para secuencia apertura - reignicion - aper-
tura de un banco de capacitores.
120 CAP
ITULO 6. TRANSITORIOS DE CONMUTACI
ON
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
6
5
4
3
2
1
0
1
2
3
x 10
4
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Figura 6.32: TRV para secuencia apertura - reignicion - apertura de un banco
de capacitores.
apertura crece a un ritmo relativamente lento (frecuencia del sistema), la
probabilidad de que tal condicion se presente es baja porque los contactos
han tenido suciente tiempo para separarse completamente para cuando se
alcanza el maximo TRV. En cambio, para un circuito en el que domina la
inductancia, es posible que se presente un cruce por cero de la corriente (y
por lo tanto una probable extincion del arco) en un instante para el que los
contactos apenas empiezan a separarse.
En un circuito inductivo, si la corriente se interrumpe exactamente en el
cruce por cero, el voltaje de la fuente es maximo en ese instante. Esto se
muestra en la Figura 6.33. Si la interrupcion ocurre cuando los contactos
a un no se han separado completamente, existe la probabilidad de que ocurra
una reignicion del arco electrico. La corriente de re-ignicion es la suma de la
corriente en el inductor y la corriente en la capacitancia del devanado. Tiene
una componente de alta frecuencia y una componente a la frecuencia del
sistema. Mientras esta corriente se establece, los contactos del interruptor
contin uan su viaje y favorecen una nueva interrupcion.
Esta vez, sin embargo,
la componente de alta frecuencia ocasiona que el cruce por cero de la corriente
en el interruptor ocurra cuando existe una corriente distinta de cero en el
inductor. El resultado es que se inicia un fenomeno parecido al de supresion
de corriente: la corriente en el inductor es forzada a cargar el capacitor,
originando una elevacion en el voltaje del mismo. La Figura 6.34 muestra
6.6. RE-IGNICI
ON 121
0 0.5 1 1.5 2 2.5 3 3.5 4
x 10
3
1.5
1
0.5
0
0.5
1
1.5
2
2.5
x 10
4
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Vs
Vc
TRV
Figura 6.33: Voltajes transitorios para apertura exitosa de carga inductiva.
los voltajes transitorios para una reignicion.
122 CAP
ITULO 6. TRANSITORIOS DE CONMUTACI
ON
0 0.5 1 1.5 2 2.5 3 3.5 4
x 10
3
7
6
5
4
3
2
1
0
1
2
3
4
x 10
4
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Vs
Vc
TRV
Figura 6.34: Voltajes transitorios para apertura - reignicion - apertura de
carga inductiva.
Captulo 7
Transitorios en transformadores
En las operaciones de conmutaci on que envuelven transformadores y reac-
tores, se presentan fenomenos que requieren consideracion especial. Ante-
riormente se han presentado casos en los que se ha considerado suciente
modelar al transformador como una inductancian lineal; ahora se discutiran
otros fenomenos para los cuales es necesario un modelo mas detallado de
la caracterstica de saturacion del n ucleo ferromagnetico. Asimismo, hasta
el momento se ha representado a los transformadores como un todo, sin
considerar los fenomenos que ocurren en el interior. En determinadas situa-
ciones, es necesario examinar con mas detalle los fenomenos que ocurren en el
devanado, por ejemplo para determinar las tensiones que son transferidas ca-
pacitivamente entre devanados, y la distribucion transitoria del voltaje entre
vueltas y entre bobinas y tierra.
7.1 Modelado de transformadores para bajas
frecuencias
En esta seccion se propone un metodo de modelado de transformadores,
adecuado para estudios de transitorios en bajas frecuencias, por ejemplo
la determinacion de corrientes de energizacion (inrush) o el diagnostico o
prediccion de ferro-resonancia. En consecuencia, las capacitancias de los de-
vanados se ignoran; en cambio, se incluyen las inductancias de dispersion y
la inductancia de magnetizacion.
Con el metodo discutido es posible sintetizar un modelo del transformador
en base solamente a los datos de placa del mismo. Esto es una ventaja, porque
123
124 CAP
ITULO 7. TRANSITORIOS EN TRANSFORMADORES
en la practica resulta difcil o inconveniente realizar pruebas de medicion de
parametros de los transformadores, o bien no se dispone de los resultados de
las pruebas efectuadas en fabrica.
La discusion considera un transformador trifasico, formado por tres mod-
elos de transformador monofasico en donde se ignoran los efectos de aco-
plamiento entre las fases o piernas del transformador. Cada transformador
monofasico se modela mediante el circuito equivalente clasico, al cual se le
adiciona una rama de magnetizacion no lineal.
7.1.1 Datos requeridos
En la sntesis del modelo se asume que se cuenta con los siguientes datos del
transformador:
Capacidad nominal S
B
(VA).
Voltajes nominales (primario y secundario) V
B
(V). Es com un emplear
valores de voltaje de lnea (V
L
).
Porcentaje de impedancia serie %Z.
Relacion X/R serie.
Frecuencia de operacion f (Hz).
En la lista anterior, el subndice B indica cantidades base.
Probablemente la relacion X/R no se conozca. En ese caso, se puede
asumir un valor de 10 o alg un otro a partir de la experiencia.
7.1.2 Impedancia serie
La impedancia serie del transformador (usualmente dada en porciento) es un
dato de placa. Esta determinada por la resistencia e inductancia de dispersion
de los devanados.
El dato de impedancia o reactancia serie reportado en la placa del trans-
formador representa la impedancia total, es decir la suma de la impedancia
del devanado primario y la del secundario. Podemos asignar la mitad de esta
impedancia a cada devanado.
7.1. MODELADODE TRANSFORMADORES PARABAJAS FRECUENCIAS125
El procedimiento para la determinacion de la impedancia serie en es
como sigue. Primeramente se determina la impedancia base. Para una
conexion en Y, la impedancia base esta dada por:
Z
B
=
V
2
L
S
B
,
mientras que si la conexion es , la impedancia base es:
Z
B
= 3
V
2
L
S
B
.
Se puede comprobar que estas dos expresiones se reducen a la expresion por
fase siguiente:
Z
B
=
V
2
S
1
.
La impedancia serie es entonces
Z
S
=
%Z
100
Z
B
La reactancia serie se divide igualmente entre los dos devanados (primario
y secundario). Mas a un, puede asumirse que la impedancia es totalmente
reactiva:
X
L
=
Z
S
2
Estrictamente, esto es incorrecto, pero el error es peque no porque la re-
sistencia del devanado regularmente es peque na comparada con la reactancia
(recuerde que una valor tpico de es X/R para transformadores es 10). Fi-
nalmente, la resistencia del devanado esta dada por:
R =
X
L
X/R
El procedimiento anterior se efect ua tanto para el lado primario como
para el secundario.
7.1.3 Rama de magnetizacion
El modelado del n ucleo ferromagnetico del transformador puede efectuarse
en base a la Tabla 7.1 . En ella se muestran datos de voltaje aplicado y
126 CAP
ITULO 7. TRANSITORIOS EN TRANSFORMADORES
Tabla 7.1: Caracterstica de magnetizacion en pu.
V
pu
(RMS) I
pu
(RMS)
0.90 0.005
1.00 0.008
1.10 0.015
1.20 0.050
1.25 0.150
corriente de magnetizacion medida para un transformador en particular; los
valores han sido expresados en por unidad (pu), por lo que pueden aplicarse
a cualquier otro transformador.
Al utilizar los datos de la Tabla 7.1, se esta asumiendo que las mediciones
efectuadas a un transformador en particular pueden trasladarse y aplicarse
a otro. Obviamente esto no es necesariamente correcto, pero el error intro-
ducido se acepta a falta de mejores datos. Ademas, es de esperar que los
tipos de acero empleados en transformadores, y los criterios de dise no de
los mismos (p. ej. grado de saturacion) no varen apreciablemente entre
fabricantes.
7.1.4 Inductancia inicial de magnetizacion
En algunos programas de analisis de transitorios electromagneticos, por ejem-
plo en ATP, se requiere especicar la inductancia de magnetizacion para bajas
densidades de ujo, con el objeto de realizar la inicializacion del modelo, que
consiste en una solucion en estado estacionario senoidal. Para ello, se requiere
determinar un par de valores de corriente de magnetizacion y encadenamiento
de ujo (I
0
,
0
), a partir de los cuales se determina una inductancia (lineal)
de magnetizacion.
Estos valores se pueden calcular a partir de la Tabla 7.1: I
0
es el valor
de corriente de magnetizacion a voltaje nominal (1pu). Por otra parte, de
acuerdo con la ley de Faraday las magnitudes de voltaje y encadenamiento
de ujo en el estado estacionario senoidal estan relacionadas por
V = .
Entonces, el valor de encadenamiento de ujo correspondiente a un nivel de
7.1. MODELADODE TRANSFORMADORES PARABAJAS FRECUENCIAS127
tension V
0
esta dado por
0
=
V
0
2f
.
7.1.5 Ejemplo
Considere un transformador trifasico con los siguientes datos de placa:
S
B
= 20MVA
115kV / 13.8kV Y
% Z = 9.6
X/R = 10
f = 60 Hz
Lado de alta tension
Z
B
=
3 115000
2
20 10
6
= 1983.75
Z
S
= 0.096 1983.75 = 190.44
X
L
=
190.44
2
= 95.22
L =
95.22
2 60
= 0.2525H
R =
95.22
10
= 9.522
Lado de baja tension
Z
B
=
13800
2
20 10
6
= 9.522
Z
S
= 0.096 9.522 = 0.9141
X
L
=
0.9141
2
= 0.4571
L =
0.4571
2 60
= 0.0012H
R =
0.4571
10
= 0.04571
128 CAP
ITULO 7. TRANSITORIOS EN TRANSFORMADORES
Rama de magnetizacion
V
B
= 115000V
I
B
=
20 10
6
3 115000
= 57.97A
La curva de magnetizacion esta dada por los pares (v, i) (en volts y am-
peres) siguientes:
(103500, 0.290)
(115000, 0.464)
(126500, 0.870)
(138000, 2.900)
(143750, 8.700)
Inductancia inicial de magnetizacion
I
0
= 0.464A
0
=
115000
2 60
= 305.04Wb
7.2 Corriente de irrupcion
Los ingenieros de protecciones estan familiarizados con el fenomeno de las co-
rrientes de irrupcion (el termino en ingles es inrush) que se presentan cuando
se energiza un transformador. En ocasiones, la proteccion de sobrecorriente
o diferencial opera y el interruptor abre inmediatemante despues de haber
cerrado. En esta seccion se analizara el fenomeno detras de este compor-
tamiento.
La conguracion que analizaremos es la de una fuente de voltaje con de-
terminada resistencia, que energiza una inductancia. El circuito es el mismo
que el de la Figura 6.1, y ya se ha considerado el caso en el que la inductancia
es lineal: la corriente tiene una componente transitoria que disminuye expo-
nencialmente, la magnitud de esta componente transitoria esta determinada
por el valor instantaneo del voltaje de la fuente al momento del cierre.
Podemos asumir que una situacion parecida va a ocurrir cuando la induc-
tancia es no lineal, es decir cuando se tiene un transformador o reactor con
7.2. CORRIENTE DE IRRUPCI
ON 129
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
1.5
1
0.5
0
0.5
1
1.5
2
2.5
3
Tiempo (s)
C
o
r
r
i
e
n
t
e
(
A
)
0
10
Figura 7.1: Corrientes de irrupcion con angulos de cierre 0 y 10 grados.
n ucleo ferromagnetico. Sin embargo, dado que la caracterstica de magneti-
zacion es similar a la mostrada en la Figura 2.7, la forma de la corriente va a
ser por completo distinta. Lo que s se mantiene es la dependencia de la cor-
riente resultante respecto al instante de cierre del interruptor. Por ejemplo,
las Figuras 7.1 y 7.2 muestran la corriente para distintos angulos de cierre
para un transformador en baja tension. Para angulos peque nos, la corriente
es casi senoidal, es decir con poca distorsion armonica, y su magnitud es
relativamente peque na. Sin embargo, para angulos de cierre mas cercanos a
los 90 grados, se presentan corrientes de magnitudes de hasta dos ordenes de
magnitud superiores, que ademas son asimetricas.
7.2.1 Analisis del fenomeno
Para comprender el fenomeno de energizacion de transformadores o reactores
con n ucleo ferromagnetico, debemos recordar que el voltaje aplicado al de-
vanado y el encadenamiento de ujo magnetico resultante estan relacionados
por (2.11). Asumiendo que el voltaje aplicado al momento de energizacion es
una funcion V
m
sent, el encadenamiento de ujo debe ser
m
cost +
0
,
donde
0
es el ujo remanente en el n ucleo al momento de la energizacion
(este valor es distinto de cero si el n ucleo posee histeresis, y es cero de otra
manera). Asumiendo que
0
es nulo, se tiene que el voltaje aplicado y el en-
cadenamiento de ujo esperado deben ser como se muestra en la Figura 7.3.
130 CAP
ITULO 7. TRANSITORIOS EN TRANSFORMADORES
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
20
0
20
40
60
80
100
120
140
Tiempo (s)
C
o
r
r
i
e
n
t
e
(
A
)
30
90
Figura 7.2: Corrientes de irrupcion con angulos de cierre 30 y 90 grados.
Sin embargo, acabamos de establecer que el encadenamiento es cero al mo-
mento de energizar; existe entonces una diferencia entre el encadenamiento
de estado estable y el existente al energizar. Esta diferencia no puede desa-
parecer instantaneamente pues esto implicara un voltaje innito. As pues,
el encadenamiento debe iniciar en cero y no en el pico negativo, y su forma
de onda sigue a la del voltaje, seg un se ilustra en la Figura 7.3. Entonces,
aparece una magnitud de encadenamiento del doble de la magnitud normal
lo cual, cuando se combina con el hecho de que la curva de magnetizacion es
saturada, explica la forma de onda de la corriente de irrupcion.
El regimen de corriente elevada no se mantiene indenidamente, sino que
va disminuyendo a medida que el encadenamiento de ujo va acercandose al
valor de estado estable. La rapidez con que esto sucede es una funcion de
la resistencia del circuito, y por lo general es tal que se requieren tiempos
del orden de segundos para que se establezcan valores de estado estable.
Se sigue aplicando el hecho de que la constante de tiempo es inversamente
proporcional a la resistencia. Estrictamente, dado que la inductancia es no
lineal, y las perdidas en el n ucleo del transformador se pueden representar
como una resistencia adicional, no se puede hablar de constante de tiempo
en el sentido de la relacion L/R, y la determinacion de la rapidez con que
decae el transitorio se torna en extremo complicada.
Para diferentes instantes de energizacion, la diferencia entre el encade-
namiento nal y el inicial es mayor o menor, y eso explica la variaci on en
7.3. FERRO-RESONANCIA 131
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
1
0.5
0
0.5
1
1.5
2
Tiempo (s)
E
n
c
a
d
e
n
a
m
i
e
n
t
o
d
e
f
l
u
j
o
(
V
s
)
V
EF final
EF inicial
Figura 7.3: Voltaje aplicado y encadenamiento de ujo inicial y nal.
la magnitud de la corriente de irrupcion. Asimismo, dado que el encade-
namiento de ujo inicial esta desplazado hasta en 1pu, la corriente de ir-
rupcion es unidireccional en algunos casos, y tiene una asimetra maniesta.
A medida que el ujo va acercandose al valor de estado estable, la asimetra
va desapareciendo.
En la anterior discusion, se ha asumido tacitamente que el transformador
es monofasico. Para un transformador trifasico, dado que los voltajes estan
desfasados en 120 grados, existe una alta probabilidad de que al menos una
de las fases se energice con un angulo que provoque una corriente de ir-
rupcion elevada. Para poner en perpectiva las magnitudes, se puede esperar
que la corriente de magnetizacion de estado estable sea del orden de 5% de
la corriente nominal, mientras que la corriente de irrupcion puede alcanzar
300%.
7.3 Ferro-resonancia
En circuitos CL lineales, se dice que se tiene una condicion de resonancia
cuando las impedancias de dos elementos se cancelan entre s. Esto sucede
porque la impedancia capacitiva tiene signo opuesto a la impedancia induc-
tiva, por lo que es posible que para ciertos valores de parametros y frecuencia
ambas cantidades se anulen y se tenga una impedancia total muy baja. La
frecuencia para la cual esto sucede se llama frecuencia de resonancia. Por
132 CAP
ITULO 7. TRANSITORIOS EN TRANSFORMADORES
ejemplo, para un capacitor y un inductor conectados en serie, existe una fre-
cuencia para la cual se observa resonancia serie. El circuito mostrado en la
Figura 7.4 tiene una ecuacion de voltaje dada por
V s = V
L
+ V
C
= I(jL +
1
jC
) (7.1)
Un posible diagrama fasorial de los voltajes y la corriente se muestran en
la Figura 7.5. No solo la corriente resultante puede alcanzar valores muy
elevados, sino que dado que los voltajes se cancelan, las magnitudes de voltaje
en el capacitor y en el inductor pueden exceder cada uno el voltaje de la fuente
y alcanzar tambien valores muy grandes.
Es claro que la condicion de resonancia debe evitarse en sistemas electricos
de potencia o distribucion, pero en ocasiones puede presentarse, sobre todo
en conjuncion con transformadores. Por eso mismo, cuando tal fenomeno se
presenta, se denomina ferro-resonancia, para enfatizar el hecho de que esta
presente un n ucleo saturable. La no linealidad del n ucleo origina a su vez
algunos efectos particulares que consideramos a continuacion. Un ejemplo de
una condicion para la cual puede presentarse el fenomeno de ferro-resonancia
se muestra en la Figura 7.6a. En esta, una de las fases del lado de alta
tension del transformador permanece conectada a la fuente, mientras que las
dos restantes estan abiertas; esto puede presentarse, por ejemplo, cuando dos
de los fusibles se funden (condicion permanente) o bien moment aneamente
cuando uno de los polos del interruptor cierra primero (condicion transitoria).
El cable o lnea que va del fusible al transformador tiene cierta capacitancia,
por lo que el circuito equivalente es como se muestra en la Figura 7.6b; se
observa que existe una conexion serie entre la inductancia del devanado y la
capacitancia del cable. La impedancia de la rama inductiva entre B y C es
alta comparada con la de la combinacion inductancia-capacitancia, y puede
eliminarse del modelo.
7.3.1 Ejemplo
Para la conguracion mostrada en la Figura 7.4 pero tomando en cuenta la
resistencia del devanado, siguiendo los metodos explicados previamente se
tiene que las ecuaciones de estado estan dadas por:
di
dt
=
v
s
Ri v
c
d
di
(7.2)
7.3. FERRO-RESONANCIA 133
L
C
Vs
Figura 7.4: Circuito CL serie. En ciertas situaciones, puede presentar el
fenomeno de resonancia.
I
V
V
V
L
C
S
Figura 7.5: Diagrama fasorial para circuto CL serie.
134 CAP
ITULO 7. TRANSITORIOS EN TRANSFORMADORES
A
Vs
B
C
G
G
A
B
C Vs
Figura 7.6: Transformador delta-estrella con dos fases abiertas y circuito
equivalente.
7.3. FERRO-RESONANCIA 135
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.05
2000
1500
1000
500
0
500
1000
1500
2000
2500
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
Vs
500xIc
Vc
Figura 7.7: Tensiones en la fuente y en el capacitor para un caso de ferro-
resonancia.
dv
c
dt
=
i
L
C
(7.3)
Dependiendo de la combinaci on de valores, la respuesta transitoria del cir-
cuito cuando se conecta la fuente senoidal puede ser como ya se ha visto
para el caso de energizacion de bancos de capacitores. Sin embargo, si la
capacitancia es lo sucientemente grande y la inductancia se considera no
lineal, entonces aparecen ciertos efectos peculiares, como los ilustrados en la
Figura 7.7. Se obseva que la corriente tiene una forma de onda no simetrica
y alcanza caractersticas de pulso en ciertos instantes; esto se debe a que el
voltaje en el inductor es elevado. Respecto al voltaje de la fuente, el capaci-
tor alcanza valores de alrededor de 3 p.u. que coinciden con el cruce por cero
de la corriente.
Es claro que una condicion as no es aceptable. Si la conguracion del
circuito es permanente, por ejemplo el caso de una fase del transformador
conectada y dos fases abiertas, entonces existe la posibilidad de que aparezca
un da no al equipo. Si la condicion es transitoria, por ejemplo como resul-
tado del cierre de un polo del interruptor antes que los otros dos, entonces
la condicion de alto voltaje no se mantiene por mucho tiempo y es menos
probable que se da ne el equipo.
136 CAP
ITULO 7. TRANSITORIOS EN TRANSFORMADORES
7.4 Transferencia capacitiva
Los devanados de los transformadores tienen una capacitancia entre vueltas y
a tierra. En condiciones de operacion de estado estable, esta capacitancia no
se toma en cuenta porque su impedancia es muy alta. Sin embargo, ya hemos
visto que cuando no existe una trayectoria alternativa, por ejemplo en las
operaciones de desconexion, tal capacitancia juega un papel muy importante.
Otra situacion en la que se hace necesario tomar en cuenta la capacitancia es
cuando el rango de frecuencias del fenomeno abarca valores de kHz, porque
en ese caso la impedancia capacitiva toma valores menores y porporciona por
lo tanto trayectorias de corriente que usualmente no se consideran.
Por ejemplo, suponiendo que se esta considerando el efecto que un tran-
sitorio de conmutacion en el lado de alta tension tiene sobre las cargas del
lado de baja tension, podramos recurrir a un modelo del transformador como
el mostrado en la Figura 7.8. Las capacitancias a tierra modelan el medio
dielectrico entre el devanado y el n ucleo ferromagnetico, mientras que la ca-
pacitancia entre devanados modela el medio dielectrico entre las bobinas de
alta y baja tension. Para una frecuencia lo sucientemente alta, las inductan-
cia propias y mutuas se comportan practicamente como un circuito abierto
y unicamente las capacitancias determinan el fenomeno.
La consecuencia de esta situacion es que, cuando ocurre un transitorio de
alta frecuencia en uno de los lados del transformador, este se ve reejado en el
otro lado. Sin embargo, la relacion inductiva de transformacion no interviene,
sino que la trayectoria proporcionada por la capacitancia entre devanados es
responsable por la transferencia del transitorio. A mayor frecuencia, menor
impedancia capacitiva; entonces, para frecuencias muy altas los devanados
practicamente estan conectados a un punto com un y el voltaje transitorio
del lado de alta, por ejemplo, se transere en su totalidad al lado de baja.
7.5 Transitorios en devanados
Un devanado de un transformador, o en general de cualquier maquina elec-
trica, consiste en vueltas aisladas de un conductor sobre un n ucleo ferro-
magnetico. Electricamente, tal conguracion es en extremo complicada,
porque existen capacitancias distribudas entre vueltas y entre conductor y
tierra, y las vueltas consideradas individualmente se acoplan magneticamente
entre s ademas de estar conectadas en serie. Por lo mismo, un modelo de-
7.5. TRANSITORIOS EN DEVANADOS 137
Figura 7.8: Modelo de circuito de un transformador para rango amplio de
frecuencias.
tallado de esta conguracion puede llegar a ser muy complejo. Cuando el
enfasis es en el efecto total, el devanado se puede representar mediante unos
cuantos elementos concentrados, la inductancia y la capacitancia totales del
devanado por ejemplo.
Cuando el enfasis es en el comportamiento interno del devanado, se debe
encontrar un modelo adecuado que permita determinar las cantidades de in-
teres. Esta informacion es importante para el dise nador del transformador
o maquina, porque le permite determinar los esfuerzos dielectricos a los que
estara sometido el aparato durante su operacion. Los resultados obtenidos
tambien pueden serle utiles, por lo menos desde el punto de vista cuali-
tativo, a quien opera el equipo, pues ayudan a explicar las causas de falla
dielectrica, y a proponer posibles remedios. Un modelo simple puede tomarse
como punto de discusion. Mediante tecnicas de simplicacion de circuitos, se
puede mostrar que la red escalera de la Figura 7.9 es un posible modelo del
devanado [6]. Para asignar valores numericos a los parametros, se debe tener
informacion dimensional y de los materiales utilizados. Este tipo de modelo
es adecuado para estudios de transitorios de conmutaci on; para transitorios
mas rapidos, por ejemplo para determinar la distribucion inicial de voltajes
en el caso de descargas atmosfericas, se encuentra que las frecuencias involu-
cradas son tan altas, que las inductancias en la red escalera act uan como
barreras a la corriente. En otras palabras, el ujo magnetico no alcanza a es-
tablecerse y la red se puede simplicar mas a un a una red escalera capacitiva.
La corriente que circula entonces es debida exclusivamente a la corriente de
desplazamiento en el asilamiento del devanado.
En la Figura 7.10 se muestran las tensiones en la vuelta inicial y en el
138 CAP
ITULO 7. TRANSITORIOS EN TRANSFORMADORES
Figura 7.9: Red escalera que modela a un devanado.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 10
6
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
x 10
6
Tiempo (s)
V
o
l
t
a
j
e
(
V
)
1000xIs
Vi
Vm
Figura 7.10: Tensiones en la vuelta inicial y media de un devanado para un
impulso de corriente.
medio del devanado para el caso en que se aplica una corriente de impulso
de 2x20s, 1000A pico. Los parametros de la red escalera que modela al
devanado son: inductancia de 0.1mH, capacitancias a tierra de 2.5 F, y
capacitancias entre vueltas de 370F. El tipo de fuente de impulso que se
utilizo modela una descarga atmosferica directa.
Parte IV
Redes de parametros
distribudos
139
Captulo 8
Lneas de transmision
Los casos transitorios considerados hasta ahora tienen la caracterstica com un
de que se han modelado a base de elementos de circuito de parametros concen-
trados. En cualquier circuito o equipo, estos parametros (R, L, C) son en re-
alidad cantidades distribudas, pero en muchos casos los resultados obtenidos
son sucientemente realistas para justicar su uso.
En determinadas circunstancias, sin embargo, la naturaleza distribuda
de los componentes debe tomarse en cuenta. El caso obvio es el de lneas de
transmision, pero los devanados de maquinas rotatorias y transformadores
tambien admiten una representaci on distribuda (sobre todo cuando se estu-
dian transitorios rapidos y se esta interesado en las condiciones al interior del
devanado). Al contrario que en el caso concentrado, en un sistema distribudo
se observan ondas viajeras (de voltaje y corriente).
El comportamiento de lneas electricas de transmision tiene algunos as-
pectos comunes con otros fenomenos de propagacion como el ujo de agua en
un canal y la transmision de sonido dentro de un t unel. Una red LC escalera
tambien muestra algunas caractersticas comunes si el n umero de elementos
es sucientemente grande.
En una lnea de transmision, un disturbio en el inicio viaja a traves de la
lnea con velocidad nita, y es advertido al extremo de la lnea solo despues
de que ha transcurrido un intervalo de tiempo. La velocidad de propagacion
es la velocidad con la que viajan las ondas electromagneticas en la lnea y
esta determinada por sus caractersticas fsicas. Esta velocidad es constante
si los parametros distribudos son constantes.
Algunas nociones validas en el caso de circuitos de parametros concen-
trados dejan de tener validez en el caso de lneas electricas. Por ejemplo, la
141
142 CAP
ITULO 8. L
INEAS DE TRANSMISI
ON
corriente que esta entrando en la lnea en un instante dado no necesariamente
es igual a la que sale en el otro extremo.
8.1 La ecuacion de onda
Consideramos inicialmente una lnea de transmision de dos conductores, sin
perdidas. Tal lnea tiene una cierta inductancia distribuda que toma un valor
l por unidad de longitud, y una capacitancia distribuda que toma un valor c
por unidad de longitud. Consideramos un tramo de la lnea de longitud x
y concentramos la inductancia y la capacitancia en los elementos mostrados
en la Figura 8.1. Entonces, usando las deniciones de la misma gura, se
tiene que el incremento de voltaje es
v = lx
i
t
, (8.1)
que en el lmite se convierte en
v
x
= l
i
t
. (8.2)
De igual manera, el incremento de corriente es
i = cx
v
t
, (8.3)
que en el lmite queda
i
x
= c
v
t
. (8.4)
Estas son las dos ecuaciones de una lnea bilar sin perdidas. Las ecua-
ciones estan acopladas en v e i. Derivando una de ellas respecto a x y la
restante respecto a t y sustituyendo, se obtienen las siguientes ecuaciones
desacopladas:
2
v
x
2
=
1
2
v
t
2
, (8.5)
2
i
x
2
=
1
2
i
t
2
, (8.6)
donde
=
1
lc
(8.7)
8.1. LA ECUACI
ON DE ONDA 143
La solucion general de ecuaciones de este tipo es de la forma
v = f
1
(x t) + f
2
(x + t), (8.8)
seg un fue demostrado por DAlembert. Una solucion similar existe para la
corriente. Las funciones f
1
y f
2
representan ondas viajeras. Para compro-
barlo, observe que en t = 0 se tiene que la funcion f
1
vale f
1
(x), es decir una
distribucion espacial dada. Especialmente, para x = a se tiene f
1
(a). Para
un tiempo posterior, este valor f
1
(a) aparece en x = a+t. Esto implica que
la distribucion inicial f
1
(x) se ha desplazado en la direccion positiva de x.
Similarmente, la onda f
2
viaja en la direccion negativa de x. Ambas ondas se
desplazan con velocidad y por lo tanto a esta cantidad se le llama velocidad
de propagacion.
Como consecuencia de las ecuaciones, un disturbio en alg un punto de la
lnea, como puede ser la aplicacion de un voltaje o una corriente, resulta en
el inicio de dos pares de ondas viajeras: un par que viaja en la direccion
positiva (un voltaje acompa nado de una corriente) y otro par en la direccion
negativa (nuevamente un voltaje acompa nado de una corriente).
Suponiendo que se ha determinado la solucion (8.8) para el voltaje en
la lnea, entonces (8.4) puede utilizarse para determinar la corriente, proce-
diendo como sigue. Consideremos inicialmente el primer termino del lado
derecho de (8.8), y denamos
y = x t, (8.9)
de donde
f
1
(x t) = f
1
(y). (8.10)
Sustituyendo esta expresion en (8.4) y usando la regla de la cadena:
i
x
= c
f
1
y
(), (8.11)
la cual se puede integrar en x quedando
i =
x
c
f
1
y
dx. (8.12)
Sin embargo, de la denicion de y se desprende que dx = dy y se puede
cambiar el dominio de integraci on a y:
i =
y
c
f
1
y
dy = cf
1
, (8.13)
144 CAP
ITULO 8. L
INEAS DE TRANSMISI
ON
+
-
V
L
C
I
x
x
Figura 8.1: Elemento diferencial de una lnea de transmision de dos conduc-
tores.
que despues de sustituir la expresion para queda
i =
f
1
Z
0
, (8.14)
donde Z
0
es la impedancia caracterstica y esta dada por
Z
0
=
l
c
. (8.15)
El mismo procedimiento se puede aplicar a la componente f
2
de (8.8), por lo
que la solucion completa para la corriente es:
i =
1
Z
0
f
1
(x t)
1
Z
0
f
2
(x + t). (8.16)
Se concluye que voltaje y corriente estan relacionados por la impedancia
caracterstica Z
0
, pero el signo relativo de ambas cantidades depende del
sentido de viaje de la onda: voltajes y corrientes viajando en el sentido
positivo tienen signos iguales, pero voltajes y corriente viajando en el sentido
negativo tienen signos contrarios.
8.2 Reexion y refraccion
La corriente y el voltaje en una lnea de transmision estan relacionados por
la constante Z
0
, la impedancia de la lnea. Cuando esta cambia de un punto
8.2. REFLEXI
ON Y REFRACCI
ON 145
a otro (en un punto de discontinuidad, por ejemplo la union de dos lneas
distintas), debe ocurrir alg un ajuste en la magnitud de voltajes y corrientes,
el cual toma la forma de dos nuevos pares de ondas: un voltaje y una corriente
reajados que empiezan a viajar en sentido opuesto a la onda incidente, y un
voltaje y una corriente refractados en el mismo sentido que la onda incidente.
Considere por ejemplo la union de dos lneas A y B tales que Z
A
> Z
B
,
con un voltaje escalon v
1
incidente. Entonces
i
1
=
v
1
Z
A
(8.17)
es la corriente incidente. Si la onda de voltaje reejada se denota por v
2
y la
refractada por v
3
, entonces
i
2
=
v
2
Z
A
, (8.18)
i
3
=
v
3
Z
B
. (8.19)
Corriente y voltaje deben ser continuos en la union, de donde
v
1
+ v
2
= v
3
, (8.20)
i
1
+ i
2
= i
3
. (8.21)
Sustituyendo en la ecuacion de corrientes:
v
1
Z
A
v
2
Z
A
=
v
3
Z
B
, (8.22)
que conduce al coeciente de reexion
v
2
=
Z
B
Z
A
Z
A
+ Z
B
v
1
, (8.23)
y al coeciente de refraccion
v
3
=
2Z
B
Z
A
+ Z
B
v
1
. (8.24)
En la Figura 8.2 se muestran los perles de voltaje y de corriente en un
punto de discontinuidad. Se puede apreciar que el efecto de un cambio de
impedancia en la lnea es la aparicion de ondas reejadas; desde un punto
de vista practico, por ejemplo en lneas de transmision para comunicaciones,
este reejo es indeseable porque impide que la energa enviada en un extremo
alcance el otro; es por esta razon que se deben igualar las impedancias al
conectar lneas de transmision o cargas.
146 CAP
ITULO 8. L
INEAS DE TRANSMISI
ON
V1
Za Zb
I1
V2
V3
I3
I2
Figura 8.2: Ondas reejadas y refractadas en un punto de cambio de
impedancia.
8.3 Terminaciones de lneas
En la seccion anterior se discutio el efecto de un cambio de impedancia en la
lnea. Una impedancia colocada al nal de la lnea, por ejemplo una induc-
tancia representando a una carga, es un caso de un cambio de impedancia,
igual que los dos casos lmite de una lnea terminada en un corto circuito y
una lnea terminada en circuito abierto.
8.3.1 Lnea terminada en corto circuito
En una lnea terminada en corto circuito (es decir, en una impedancia cero),
una onda incidente de voltaje da lugar a un voltaje reejado que cancela
exactamente al voltaje incidente, puesto que el voltaje refractado es cero.
Asumiendo que la lnea se energiza mediante un voltaje escalon, este em-
pieza a viajar hacia el extremo hasta alcanzar el corto circuito. Si el voltaje
incidente en este punto es v y la corriente i, las ondas reejadas tendran mag-
nitud v e i respectivamente (recuerde que el signo de voltajes y corrientes
es opuesto en el sentido negativo de viaje).
Estas relaciones se traducen en
que el voltaje en la lnea se cancela a medida que la onda reejada viaja hacia
la fuente, pero la corriente se duplica (puesto que es la suma de la onda inci-
dente original y de la onda de corriente reejada). Cuando la onda reejada
llega a la fuente, y dado que se asume una fuente de voltaje constante en la
misma, se inicia una nueva onda de voltaje v en sentido positivo, con una
corriente i asociada que, sumada a las ondas de corriente que ya existan en
la lnea, arroja una magnitud de 3i. El proceso contin ua similarmente, de
8.3. TERMINACIONES DE L
INEAS 147
manera que para un observador situado en un punto sobre la lnea, el voltaje
alterna entre v y 0, mientras que la corriente asume los valores 0, i, 2i, 3i,
4i, .... Un observador situado en la fuente ve un voltaje constante v, y una
corriente i, 3i, 5i, ... Por su parte, un observador situado en el extremo de
la lnea ve un voltaje siempre de 0, y una corriente 0, 2i, 4i, ...
8.3.2 Lnea terminada en circuito abierto
Para una lnea terminada en circuito abierto (es decir, en una impedancia in-
nita), la corriente en la terminacion debe ser cero en todo momento. Cuando
una onda incidente de voltaje v
1
llega al punto de terminacion (acompa nada
de una onda correspondiente de corriente i
1
), una nueva onda i
2
se inicia
de modo que se cumpla la condicion de frontera; esta onda de corriente ree-
jada va acompa nada de una onda de voltaje +v
2
. Entonces, el voltaje en el
extremo abierto es igual a 2 veces el voltaje de la fuente. Cuando las ondas
reejadas llegan a la fuente, que asumimos es de voltaje constante, se forma
una onda de voltaje v
3
de modo que se cumpla la condicion de frontera de
voltaje, acompa nada de una corriente i
3
. A su vez, cuando estas alcanzan
el extremo abierto de la lnea, originan ondas v
4
y +i
4
reejadas que via-
jan hacia la fuente. Un observador ubicado en la fuente percibe un voltaje
siempre constante y una corriente que alterna entre +i y i. Un observador
en el extremo abierto de la lnea percibe una corriente siempre nula, y un
voltaje que alterna entre 0 y 2v. Un observador ubicado en un punto de la
lnea que no sea uno de sus extremos percibira un voltaje que pasa de 0 a v,
2v, v, 0, etc, mientras que observar a una corriente de 0, i, 0, i, 0, etc.
8.3.3 Terminaci on general
Para una terminacion general formada de componentes R,L y C, un analisis
cualitativo como el presentado en los dos casos anteriores no es posible. Una
dicultad que se presenta inmediatamente es decidir que valor de impeden-
cia asignar al circuito de terminacion, si sabemos que para un elemento de
circuito el valor de la impedancia depende de la frecuencia. Una manera de
manejar el problema es recurriendo a la transformacion de Laplace, mediante
la cual las impedancias del elemento terminal pueden usarse para determinar
los coecientes de reexion y refraccion.
148 CAP
ITULO 8. L
INEAS DE TRANSMISI
ON
8.4 Lneas de transmision de potencia
El analisis y resultados presentados hasta ahora se aplican a lneas bilares
sin perdidas. Sin embargo, las lneas de transmision usadas para transmision
de potencia electrica son multiconductoras con retorno por tierra. Aunque
algunos de los resultados obtenidos siguen siendo aplicables, existen puntos
que debemos considerar en este caso.
8.4.1 Resistencia
En primer lugar, dado que las lneas reales tienen resistencia, es de esperarse
que parte de la energa transmitida vaya perdiendose conforme la onda viaja.
Esto resulta en una distorsion de la onda viajera, es decir en un cambio de su
forma de onda. No solo la resistencia serie de los cables, sino tambien perdidas
debidas a efecto corona contribuyen a las perdidas totales. Mas a un, la
resistencia de la lnea es una funcion de la frecuencia de la onda transmitida,
es decir, la resistencia en una funcion de la frecuencia. Si recordamos que una
onda arbitraria se puede considerar formada de una onda fundamental y un
n umero de terminos armonicos, se puede ver que cada componente armonica
se aten ua de manera distinta, de acuerdo a su frecuencia, y frecuencias altas
se aten uan mas rapidamente. Como resultado, una funcion de impulso como
la de una descarga atmosferica, se distorsiona y aten ua a medida que viaja
por la lnea.
Aunque el terreno no se usa intencionalmente como conductor (la cor-
riente de retorno por tierra es cero en condiciones balanceadas), interviene
cuando se presentan condiciones de falla. La resistencia del terreno es tambien
dependiente de la frecuencia.
8.4.2 Multiconductores
Las lneas de transmision de potencia electrica son trifasicas, y es posible que
cuenten con uno o mas cables de guarda. Tambien es frecuente que dos o
mas lneas trifasicas se monten en la misma estructura, y esto constituye una
lnea de transmision con n conductores. El analisis de tal sistema sigue las
mismas lneas generales que para el caso de la lnea bilar [7]. La ecuacion
de la lnea de transmision es la forma matricial de (8.5), quedando:
2
V
x
2
= LC
2
V
t
2
, (8.25)
8.4. L
INEAS DE TRANSMISI
ON DE POTENCIA 149
donde L y C son las matrices de inductancia y capacitancia del sistema. La
ecuacion matricial anterior cosnta de un n umero de renglones igual al n umero
de conductores en la lnea. La matriz de inductancia tiene los terminos
de inductancia propia de cada conductor en la entrada diagonal respectiva,
mientras que los terminos de inductancia mutua son las entradas fuera de la
diagonal. Similarmente, la capacitancia a tierra es el termino diagonal, y las
capacitancias mutuas entre conductores son las entradas fuera de la diagonal.
Dado que se tienen n ecuaciones acopladas, existen n modos de propa-
gacion en la lnea multiconductora, y cada modo tiene una velocidad de
propagacion. La justicacion de esto es que, si se aplica una transformacion
que diagonalice el sistema de ecuaciones, entonces se tendran n ecuaciones
independientes de lnea de transmision, y la propagacion en cada una de estas
lneas desacopladas se desarrolla con una velocidad distinta para cada modo.
A este metodo de diagonalizar las ecuaciones y analizarlas en el dominio
transformado se le conoce como analisis modal.
8.4.3 Acoplamiento
Desde el punto de vista electrico, dos lneas de transmision adyacentes forman
un solo conjunto. De esta manera, un disturbio propagado en una de las lneas
aparecera en la otra por efecto del acoplamiento inductivo y capacitivo. Esto
sucede por ejemplo en el caso de interferencia en lneas telefonicas debido
a un transitorio en una lnea de transmision de potencia electrica cercana.
Otro caso es la induccion y consecuentes perdidas por acoplamiento de una
lnea con tubera o vallas metalicas debajo de la misma.
Un caso relacionado es el acoplamiento de una descarga atmosferica con
una lnea. Existen dos mecanismos por los cuales una descarga atmosferica
afecta al sistema de transmision: puede suceder que la corriente de descarga
se drene a tierra a traves de los conductores de la lnea, o bien que una
descarga directa al suelo se acople electromagneticamente con la lnea y de
esta manera se origine una sobretension en los conductores de la misma.
8.4.4 Modelado
Las consideraciones apuntadas en las secciones anteriores sirven para dar
al lector una idea de la complejidad que presenta el analisis transitorio de
lneas de transmision. De la misma manera que la simulaci on de circuitos con
parametros concentrados es en muchos casos el unico recurso practico, as la
150 CAP
ITULO 8. L
INEAS DE TRANSMISI
ON
simulacion de lneas de transmision es un camino mas facil que la solucion ex-
acta. Esta simulacion puede llevarse a cabo recurriendo a la descomposicion
modal mendionada arriba; este es el caso del programa ATP, por ejemplo.
Una complicacion es el hecho de que para poder simular el compor-
tamiento de una lnea se ha de especicar un modelo e la misma que esta
formado por las matrices de inductancia, capacitancia y, en el caso de lneas
de transmision con perdidas, de resistencia y conductancia. El calculo de
estas matrices no es tarea sencilla, pero por lo mismo existen programas de
computacion especializados que pueden utilizarse para tal n, por ejemplo
LCC (Line and Cable Constants).
Bibliografa
[1] D.G. Zill. A rst course in dierential equations. Brooks/Cole, 5th edi-
tion, 2000.
[2] L. O. Chua, C. A. Desoer, and E. S. Kuh. Linear and Nonlinear Circuits.
McGraw-Hill, New York, 1987.
[3] H.W. Dommel. Digital computer solution of electromagnetic transients in
single- and multiphase networks. IEEE Transactions on Power Apparatus
and Systems, 88:18011809, April 1969.
[4] Can/Am EMTP User Group. Alternative Transients Program Rule Book.
1995.
[5] University of Wisconsin at Madison. Electromagnetic transients program
(EMTP) workbook. EPRI, 1986.
[6] A. Greenwood. Electrical transients in power systems. John Wiley &
Sons, New York, 2nd edition, 1991.
[7] C. R. Paul. Analysis of multiconductor transmission lines. John Wiley
& Sons, New York, 1994.
151
152 BIBLIOGRAF
IA
Das könnte Ihnen auch gefallen
- Dinámica de Sistemas 2020-3Dokument185 SeitenDinámica de Sistemas 2020-3adrian garduño mataNoch keine Bewertungen
- Estudio de Sobrecargas Basado en Las Normas Ansi Ieee c57.91-1995Dokument36 SeitenEstudio de Sobrecargas Basado en Las Normas Ansi Ieee c57.91-1995esportacuario100% (1)
- ATP-B1 Sesion-2Dokument28 SeitenATP-B1 Sesion-2David Gutierrez100% (1)
- Corriente Inrush ATP Y DIgSILENTDokument124 SeitenCorriente Inrush ATP Y DIgSILENTDiego Serrano100% (1)
- Coordinación de Protecciones de La Subestación Eléctrica SEAT Desbloqueado PDFDokument115 SeitenCoordinación de Protecciones de La Subestación Eléctrica SEAT Desbloqueado PDFPaul ReynaNoch keine Bewertungen
- GPRDokument59 SeitenGPRHJ CarmonaNoch keine Bewertungen
- Modelos Distribución ATP PDFDokument193 SeitenModelos Distribución ATP PDFgilbertomjcNoch keine Bewertungen
- Amplificadores de Baja FrecuenciaDokument40 SeitenAmplificadores de Baja FrecuenciaAnonymous SfF48z3N100% (1)
- Ponencia Ing - BernandinorojasDokument51 SeitenPonencia Ing - BernandinorojascesarchiletNoch keine Bewertungen
- Curso Basico de Atp - Horacio TorresDokument84 SeitenCurso Basico de Atp - Horacio Torres19848096100% (3)
- SILABO - Análisis de Fallas en Sistemas Eléctricos de PotenciaDokument3 SeitenSILABO - Análisis de Fallas en Sistemas Eléctricos de PotenciaJimmy Benites EspinozaNoch keine Bewertungen
- ModDigFPGA TesisDokument194 SeitenModDigFPGA TesisFelipe CarreñoNoch keine Bewertungen
- Transitorios 2010 PDFDokument142 SeitenTransitorios 2010 PDFchuchomat87100% (2)
- Curso Simulacion Atpdraw-1Dokument1 SeiteCurso Simulacion Atpdraw-1Jhenzo RoccaNoch keine Bewertungen
- 2.1 y 2.2 Convertidores de AC - DCDokument84 Seiten2.1 y 2.2 Convertidores de AC - DCkaori quintero100% (1)
- Sistemas LinealesDokument103 SeitenSistemas Linealesfcomeda100% (1)
- Manual de Practicas de ATPDraw PDFDokument12 SeitenManual de Practicas de ATPDraw PDFMarco C. PumaNoch keine Bewertungen
- Control Predictivo Del Convertidor Multinivel Con Enclavamiento Por Diodos y Sus Aplicaciones en Media TensiónDokument162 SeitenControl Predictivo Del Convertidor Multinivel Con Enclavamiento Por Diodos y Sus Aplicaciones en Media TensiónYeisson Muñoz100% (2)
- Pliego de Condiciones Tecnicas Instalaciones Fotovoltaicas Aisladas RedDokument40 SeitenPliego de Condiciones Tecnicas Instalaciones Fotovoltaicas Aisladas Redakete100% (1)
- Aplicación Digsilent en SISPOTDokument136 SeitenAplicación Digsilent en SISPOTJavier Valencia Murillo100% (1)
- Modelamiento de ArcoDokument99 SeitenModelamiento de ArcoJhon Benites ObadaNoch keine Bewertungen
- Toc 0310 11 02 PDFDokument63 SeitenToc 0310 11 02 PDFAlexo Crepper50% (2)
- Manual de Descarga F650Dokument5 SeitenManual de Descarga F650Daniel TuncarNoch keine Bewertungen
- EMTP06Dokument76 SeitenEMTP06Arturo BarradasNoch keine Bewertungen
- Capítulo1 Señales y SistemasDokument116 SeitenCapítulo1 Señales y SistemasDiego Naranjo100% (1)
- Tesis Jhon M. Blanco E. Simulador de Transitorios Electromagnéticos Usando PythonDokument190 SeitenTesis Jhon M. Blanco E. Simulador de Transitorios Electromagnéticos Usando Pythonyenifer100% (1)
- HTTPS://WWW Youtube Com/watch?v eNIwh7Q6t0EDokument98 SeitenHTTPS://WWW Youtube Com/watch?v eNIwh7Q6t0Easfa weNoch keine Bewertungen
- Manual de Usuario TeSysT - Profibus ESPDokument600 SeitenManual de Usuario TeSysT - Profibus ESProdrigo_7_8Noch keine Bewertungen
- Calidaddeenergiapresentacinhiokiusamexico 120914155044 Phpapp01Dokument31 SeitenCalidaddeenergiapresentacinhiokiusamexico 120914155044 Phpapp01Julian Canseco zarateNoch keine Bewertungen
- Interruptores Schneider Electric PDFDokument68 SeitenInterruptores Schneider Electric PDFjhonnyNoch keine Bewertungen
- AISLADORESDokument32 SeitenAISLADORESmegamiiryu100% (3)
- Villoldo Ruiz - Diseño y Análisis de Una Planta Solar Fotovoltaica de 8 MW Ubicada en El Bonillo, AlbaceteDokument102 SeitenVilloldo Ruiz - Diseño y Análisis de Una Planta Solar Fotovoltaica de 8 MW Ubicada en El Bonillo, Albaceteandres.rojas100% (1)
- Libro Del CursoDokument203 SeitenLibro Del CursoJuan Nicolas Carvajal BaronNoch keine Bewertungen
- Fundamentos PDFDokument330 SeitenFundamentos PDFJohnny HernanNoch keine Bewertungen
- Pruebas y Diagnóstico de Un Generador Eléctrico Marca ElectricDokument176 SeitenPruebas y Diagnóstico de Un Generador Eléctrico Marca ElectricEzequiel Perez SotoNoch keine Bewertungen
- Gerson La Torre1 PDFDokument85 SeitenGerson La Torre1 PDFElard Gutierrez HuisaNoch keine Bewertungen
- Aisladores Convensionales y PolimericosiDokument80 SeitenAisladores Convensionales y Polimericosifreddy riveraNoch keine Bewertungen
- Sistemas de Protecciones Electricas A Nivel 500kvDokument189 SeitenSistemas de Protecciones Electricas A Nivel 500kvLu Viny AndradeNoch keine Bewertungen
- Transitorios en Redes de PotenciaDokument128 SeitenTransitorios en Redes de PotenciaGabriel HerreraNoch keine Bewertungen
- Curso 8 Hrs. Ppios. Basicos de S.E. Rev. Junio 2017Dokument112 SeitenCurso 8 Hrs. Ppios. Basicos de S.E. Rev. Junio 2017laloNoch keine Bewertungen
- Protecciones ATPDraw PDFDokument128 SeitenProtecciones ATPDraw PDFGilberto Mejía100% (1)
- Modelacion Atpdraw GradoDokument52 SeitenModelacion Atpdraw GradoMiguel CallaNoch keine Bewertungen
- SILABO - Mantenimiento de Sistemas Eléctricos en MT y at Con TCTDokument4 SeitenSILABO - Mantenimiento de Sistemas Eléctricos en MT y at Con TCThederNoch keine Bewertungen
- Control MultivariableDokument170 SeitenControl MultivariableJhon Jairo Anaya100% (1)
- Proyecto No 3 Estabilidad Transitoria MultimáquinaDokument14 SeitenProyecto No 3 Estabilidad Transitoria MultimáquinaAndres MorenoNoch keine Bewertungen
- 4 PararrayosDokument15 Seiten4 PararrayosJuanJose2012Noch keine Bewertungen
- ATP-B1 Sesion-1Dokument46 SeitenATP-B1 Sesion-1David Gutierrez100% (1)
- Protecciones Automaticas Legrand - TÉCNICO COMERCIAL PDFDokument81 SeitenProtecciones Automaticas Legrand - TÉCNICO COMERCIAL PDFSantiago Alzate ANoch keine Bewertungen
- Estudio de Arco Secundario en Lineas de EHVDokument32 SeitenEstudio de Arco Secundario en Lineas de EHVosorio23100% (1)
- Problemas Resuletos SistemasdigitalesI 1Dokument100 SeitenProblemas Resuletos SistemasdigitalesI 1Angelo OrdoñezNoch keine Bewertungen
- Sistemas eléctricos en régimen no sinusoidalVon EverandSistemas eléctricos en régimen no sinusoidalNoch keine Bewertungen
- 0000Dokument154 Seiten0000ecordero78Noch keine Bewertungen
- Comporta RLCDokument123 SeitenComporta RLCJuan Carlos Torres Ito0% (1)
- Sistemas DinamicosDokument328 SeitenSistemas DinamicosJulio Cesar Medina FloresNoch keine Bewertungen
- CEIIDokument76 SeitenCEIIErwin Geovanni Villalobos GutiérrezNoch keine Bewertungen
- GMN12Dokument234 SeitenGMN12Arturo RoblesNoch keine Bewertungen
- Circuito Ii Libro Guia PDFDokument208 SeitenCircuito Ii Libro Guia PDFTania Amaranto AndradeNoch keine Bewertungen
- Proteccion de Lineas y RedesDokument111 SeitenProteccion de Lineas y RedescachiletNoch keine Bewertungen
- Curso Circuitos Electronicos PDFDokument99 SeitenCurso Circuitos Electronicos PDFVICTOR HUGO ANGULO LIZALDANoch keine Bewertungen
- Procesamiento Digital de SeñalesDokument262 SeitenProcesamiento Digital de SeñalesmarcoNoch keine Bewertungen
- Edo PracticasDokument129 SeitenEdo PracticasAlejandro SimbañaNoch keine Bewertungen
- Guía Selección Cargador de BateríasDokument4 SeitenGuía Selección Cargador de BateríasMrC03Noch keine Bewertungen
- SITRAIN Academico 17Dokument1 SeiteSITRAIN Academico 17MrC03Noch keine Bewertungen
- G0000 62 PDFDokument17 SeitenG0000 62 PDFerikaNoch keine Bewertungen
- Bateria Plomo AcidoDokument10 SeitenBateria Plomo AcidoDaniel Pérez ObandoNoch keine Bewertungen
- Cummins Grupo Electrogeno 80 DGDADokument60 SeitenCummins Grupo Electrogeno 80 DGDAMrC03Noch keine Bewertungen
- Transitorios Electromagneticos Por ManiobrasDokument25 SeitenTransitorios Electromagneticos Por ManiobrasMrC03Noch keine Bewertungen
- TYCO - Tecnologia Conectores para Cables PDFDokument24 SeitenTYCO - Tecnologia Conectores para Cables PDFMrC03Noch keine Bewertungen
- FUSELCO-Fusibles Rango E PDFDokument13 SeitenFUSELCO-Fusibles Rango E PDFMrC03Noch keine Bewertungen
- Coordinacion de Aislamiento Norma Iec 60071-2 Vs Ingenieria Por DesempeñoDokument52 SeitenCoordinacion de Aislamiento Norma Iec 60071-2 Vs Ingenieria Por Desempeño42la100% (4)
- Plan Esencial de Aseguramiento en Salud, PEAS, Ley 29344 Marco de Aseguramiento Universal en SaludDokument312 SeitenPlan Esencial de Aseguramiento en Salud, PEAS, Ley 29344 Marco de Aseguramiento Universal en SaludFernandoNoch keine Bewertungen
- Pacifico Asistencia Seguro SaludDokument71 SeitenPacifico Asistencia Seguro SaludMrC03Noch keine Bewertungen
- Control Interruptores 3APDokument10 SeitenControl Interruptores 3APMrC03Noch keine Bewertungen
- Empalmes en Fibra ÓpticaDokument22 SeitenEmpalmes en Fibra ÓpticaMrC03Noch keine Bewertungen
- Mangueras HidraulicasDokument14 SeitenMangueras HidraulicasSebastian Oviedo100% (1)
- Manual ATPEspaDokument30 SeitenManual ATPEspacheojaNoch keine Bewertungen
- Aspectos Economicos Calculo Tarifas ElectricasDokument48 SeitenAspectos Economicos Calculo Tarifas ElectricasDario Leguia LisbonNoch keine Bewertungen
- Fusibles Clase GGDokument10 SeitenFusibles Clase GGMrC03Noch keine Bewertungen
- Estudio de Factibilidad Segundo Tunel de Central SAM PDFDokument36 SeitenEstudio de Factibilidad Segundo Tunel de Central SAM PDFMrC03Noch keine Bewertungen
- Conexion de Tanque ElevadoDokument5 SeitenConexion de Tanque ElevadoCarlos Valle100% (1)
- Dimensionamiento de PAT en AnilloDokument10 SeitenDimensionamiento de PAT en AnilloMrC03Noch keine Bewertungen
- SEIN Proyectos G&T 2012-2016Dokument4 SeitenSEIN Proyectos G&T 2012-2016MrC03Noch keine Bewertungen
- Guia para Megar Diagnostico de ToDokument47 SeitenGuia para Megar Diagnostico de Toktmtk100% (6)
- FIASA Manual Calefon SolarDokument9 SeitenFIASA Manual Calefon SolarMrC03100% (1)