Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Power Profile - Armor Powers PDFDokument6 SeitenPower Profile - Armor Powers PDFlolo1972100% (2)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Waukesha Service Repair Kits 2005Dokument205 SeitenWaukesha Service Repair Kits 2005Javier Leonidas92% (13)
- Scope of The WorkDokument5 SeitenScope of The Worklogu RRNoch keine Bewertungen
- Operating Manual: Wheel Loader L538 - 432 From 13100Dokument284 SeitenOperating Manual: Wheel Loader L538 - 432 From 13100Jacques Van Niekerk80% (5)
- Proeceedings of Geotechnical Advancement in Hong Kong Since 1970s, 15 May 2007, Hong KongDokument313 SeitenProeceedings of Geotechnical Advancement in Hong Kong Since 1970s, 15 May 2007, Hong KongcheewingyuenNoch keine Bewertungen
- Seipl Profile and CapabilitiesDokument32 SeitenSeipl Profile and CapabilitiesAbhishek GuptaNoch keine Bewertungen
- 6090 Uv Printer Operation Manual - BlackDokument26 Seiten6090 Uv Printer Operation Manual - BlackSonia NaickerNoch keine Bewertungen
- Installation, Use and Maintenance Manual: Translation of The Original InstructionsDokument148 SeitenInstallation, Use and Maintenance Manual: Translation of The Original InstructionsCTHNoch keine Bewertungen
- ANDROID Workshop MaheshDokument72 SeitenANDROID Workshop MaheshPradeepCool100% (2)
- r13 - EEE JNTUDokument212 Seitenr13 - EEE JNTURAMARAONoch keine Bewertungen
- Shadow AlarmDokument1 SeiteShadow Alarmprofessinoal100% (1)
- Wireless SwitchDokument1 SeiteWireless SwitchChan ChandNoch keine Bewertungen
- WWW UsafirmwareDokument6 SeitenWWW Usafirmwaresathish2103Noch keine Bewertungen
- BHARATDokument2 SeitenBHARATsathish2103Noch keine Bewertungen
- Sample Project DocumentationDokument101 SeitenSample Project DocumentationK Keshava RaoNoch keine Bewertungen
- Pproachto Flux Controlof Induction Motors OperatedwithvDokument9 SeitenPproachto Flux Controlof Induction Motors Operatedwithvsathish2103Noch keine Bewertungen
- A New Switching Strategy For Pulse Width Modulation (PWM) Power ConvertersDokument8 SeitenA New Switching Strategy For Pulse Width Modulation (PWM) Power Converterssathish2103Noch keine Bewertungen
- Novel Fuzzy Neural Network Based Distance Relaying SchemeDokument6 SeitenNovel Fuzzy Neural Network Based Distance Relaying Schemesathish2103Noch keine Bewertungen
- MultilevelInverterForGrid ConnectedPVSystemDokument10 SeitenMultilevelInverterForGrid ConnectedPVSystemsathish2103Noch keine Bewertungen
- Application Considerations For PWM Inverter-Fed Low-Voltage Induction MotorsDokument8 SeitenApplication Considerations For PWM Inverter-Fed Low-Voltage Induction Motorssathish2103Noch keine Bewertungen
- Grid Connected Photo Voltaic System With MaximumDokument5 SeitenGrid Connected Photo Voltaic System With Maximumsathish2103Noch keine Bewertungen
- Lar EIiergy Conversion Scheme ImplementedusinggridtiedDokument4 SeitenLar EIiergy Conversion Scheme Implementedusinggridtiedsathish2103Noch keine Bewertungen
- Feed Forward Controller With Inverse Rate DependentDokument9 SeitenFeed Forward Controller With Inverse Rate Dependentsathish2103Noch keine Bewertungen
- Electronic CandleDokument1 SeiteElectronic CandlePurvi KhatriNoch keine Bewertungen
- AVirtual FluxDecouplingHysteresisCurrentDokument12 SeitenAVirtual FluxDecouplingHysteresisCurrentsathish2103Noch keine Bewertungen
- Decomposition of Arbitrarily ShapedDokument14 SeitenDecomposition of Arbitrarily Shapedsathish2103Noch keine Bewertungen
- Boost Current Multilevel Inverter and Its ApplicationDokument9 SeitenBoost Current Multilevel Inverter and Its ApplicationHarish KumarNoch keine Bewertungen
- Educational Useof EMTPMODELSforthe StudyDokument7 SeitenEducational Useof EMTPMODELSforthe Studysathish2103Noch keine Bewertungen
- Cap Start Cap Run Induction MotorsDokument10 SeitenCap Start Cap Run Induction MotorsYadagiri Goud ChNoch keine Bewertungen
- CurrentControlofVSI PWMInvertersDokument9 SeitenCurrentControlofVSI PWMInverterssathish2103Noch keine Bewertungen
- Binary Morphology With Spatially VariantDokument11 SeitenBinary Morphology With Spatially Variantsathish2103Noch keine Bewertungen
- ASingle PhaseInverterSystemforPVPowerDokument9 SeitenASingle PhaseInverterSystemforPVPowersathish2103Noch keine Bewertungen
- A Unified Framework For Hybrid ControlDokument15 SeitenA Unified Framework For Hybrid Controlsathish2103Noch keine Bewertungen
- A Three-Phase Multilevel Converter For High-Power Induction MotorsDokument9 SeitenA Three-Phase Multilevel Converter For High-Power Induction MotorsmarxelinhoNoch keine Bewertungen
- ASingle StageGridConnectedInverterDokument13 SeitenASingle StageGridConnectedInvertersathish2103Noch keine Bewertungen
- A Novel Hybrid Isolated GeneratingDokument7 SeitenA Novel Hybrid Isolated GeneratingYaswanth Kumar KolliparaNoch keine Bewertungen
- Applicationof Combined Adaptive FourierDokument8 SeitenApplicationof Combined Adaptive Fouriersathish2103Noch keine Bewertungen
- An Improved Control Strategy For Grid ConnectedDokument8 SeitenAn Improved Control Strategy For Grid Connectedsathish2103Noch keine Bewertungen
- Practices For Lesson 3: CollectionsDokument4 SeitenPractices For Lesson 3: CollectionsManu K BhagavathNoch keine Bewertungen
- A1NM Rev 30 TYPE CERTIFICATE DATA SHEET A1NM 767Dokument16 SeitenA1NM Rev 30 TYPE CERTIFICATE DATA SHEET A1NM 767MuseNoch keine Bewertungen
- EEPW3142 QP Version-ADokument8 SeitenEEPW3142 QP Version-A3nathNoch keine Bewertungen
- CarDokument5 SeitenCarHarish GundaNoch keine Bewertungen
- IT Audit Exercise 2Dokument1 SeiteIT Audit Exercise 2wirdinaNoch keine Bewertungen
- DPC6HG Aa00 G0000 ZS001 - 001 - 01Dokument6 SeitenDPC6HG Aa00 G0000 ZS001 - 001 - 01rajitkumar.3005Noch keine Bewertungen
- ASOC Exam Study Based On Latest Syllabus IndiaDokument238 SeitenASOC Exam Study Based On Latest Syllabus IndiaBiju Gopi ThilakaNoch keine Bewertungen
- W667 Job Completion CertificateDokument5 SeitenW667 Job Completion CertificateMohamed ShafeeqNoch keine Bewertungen
- Fibac 2017 ReportDokument68 SeitenFibac 2017 ReportNitin KumarNoch keine Bewertungen
- CHE463 Heat TransferDokument1 SeiteCHE463 Heat TransferEitrah Tasnim Mohamat KasimNoch keine Bewertungen
- K Sera Sera CaseDokument12 SeitenK Sera Sera CaseAditya SinghNoch keine Bewertungen
- Muhammad ALI Azmi: Contact +62 812 1944 5086 Komplek Poin Mas Blok F-2 No. 20B, Depok, Jawa BaratDokument1 SeiteMuhammad ALI Azmi: Contact +62 812 1944 5086 Komplek Poin Mas Blok F-2 No. 20B, Depok, Jawa BaratanggaraNoch keine Bewertungen
- Funambol Whatisnewinv10 June11Dokument23 SeitenFunambol Whatisnewinv10 June11Eftakhar Chowdhury PallabNoch keine Bewertungen
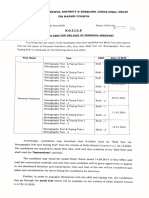
- UTDEC 2020: Sub: Skill Test/Typing Test For The Post of Personal AssistantDokument2 SeitenUTDEC 2020: Sub: Skill Test/Typing Test For The Post of Personal Assistantneekuj malikNoch keine Bewertungen
- Simplified Management With Hitachi Command Suite Application BriefDokument19 SeitenSimplified Management With Hitachi Command Suite Application BriefpankajrudrawarNoch keine Bewertungen
- K2000-Serie ENDokument1 SeiteK2000-Serie ENbala subramaniyam TSNoch keine Bewertungen
- Terms Def en It IonDokument29 SeitenTerms Def en It IonVichu Kumar KumarNoch keine Bewertungen
- Introduction To Public Health LaboratoriesDokument45 SeitenIntroduction To Public Health LaboratoriesLarisa Izabela AndronecNoch keine Bewertungen
- Employee Departure Clearance FormDokument1 SeiteEmployee Departure Clearance FormJery TomNoch keine Bewertungen
- Functional Buttons and Auto Power Off: International Electrical SymbolsDokument2 SeitenFunctional Buttons and Auto Power Off: International Electrical SymbolsVentas SA TabNoch keine Bewertungen
- Filler Efect in ShotcreteDokument24 SeitenFiller Efect in ShotcreteOscar NietoNoch keine Bewertungen