Beruflich Dokumente
Kultur Dokumente
Modelli Costitutivi
Hochgeladen von
PalazzoloFilippoOriginaltitel
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Modelli Costitutivi
Hochgeladen von
PalazzoloFilippoCopyright:
Verfügbare Formate
Modelli Computazionali per lanalisi
di continui elasto-plastici in
condizioni di deformazione piana
G. Armentano A. Bilotta
Report n. 25 Otobre 2001
Dipartimento di Strutture UNICAL 87030 Rende (Cs) Italy
tel.: +39 0984 494032 - fax: +39 0984 494045
e.mail: giampaolo.armentano@labmec.unical.it
Indice
Introduzione 1
1 Plasticit`aaspetti teorici e computazionali 1
1.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Inelasticit` a e Variabili Interne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.1 Variabili interne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.2 Decomposizione delle deformazioni . . . . . . . . . . . . . . . . . . . . . . 3
1.2.3 La natura delle variabili interne . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.4 Legge di usso e potenziale di usso . . . . . . . . . . . . . . . . . . . . . 5
1.3 Viscoplasticit` a . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3.1 Premessa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3.2 Supercie di snervamento . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3.3 Incrudimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3.4 Potenziale viscoplastico . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3.5 Transizione alla plasticit` a non viscosa . . . . . . . . . . . . . . . . . . . . 8
1.4 Plasticit`a Classica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.4.1 Legge di usso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.4.2 Work-hardening . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.4.3 Postulato di Drucker . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4.4 Conseguenze del postulato di Drucker . . . . . . . . . . . . . . . . . . . . 13
1.4.5 Normalit` a . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.5 Analisi ElastoPlastica al Passo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.5.1 Risposta elastoplastica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.5.2 Elastoplasticit` a olonoma: il principio di HaarK`arm`an . . . . . . . . . . 16
1.5.3 Algoritmo numerico di ritorno . . . . . . . . . . . . . . . . . . . . . . . . 18
1.5.4 Soluzione iterativa dellequilibrio . . . . . . . . . . . . . . . . . . . . . . . 23
1.5.5 Strategia di tipo NewtonRaphson . . . . . . . . . . . . . . . . . . . . . . 23
1.5.6 Strategia di Riks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
1.5.7 Formulazione esplicita dello schema di Riks . . . . . . . . . . . . . . . . . 24
1.5.8 Processo adattativo di analisi . . . . . . . . . . . . . . . . . . . . . . . . . 25
I
2 Metalli 27
2.1 Aspetti Fenomenologici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.1.1 Relazioni sperimentali tensionideformazioni . . . . . . . . . . . . . . . . 27
2.1.2 Deformazioni plastiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.2 Plasticit`a Associata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.2.1 Stati piani di deformazione . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.2.2 Plasticit` a perfetta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.2.3 Incrudimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.2.4 Incrudimento isotropo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3 Geomateriali 44
3.1 Aspetti Fenomenologici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.1.1 Plasticit` a dei terreni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.1.2 Plasticit` a di rocce e conglomerati . . . . . . . . . . . . . . . . . . . . . . . 47
3.2 Plasticit`a non Associata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.2.1 Il signicato della dilatanza . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.2.2 Prove di compressione triassiali e principali parametri . . . . . . . . . . . 49
3.3 Il modello di MohrCoulomb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.3.1 La funzione di snervamento . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.3.2 Legge di usso e potenziale plastico . . . . . . . . . . . . . . . . . . . . . 55
3.3.3 Estensione al caso tridimensionale . . . . . . . . . . . . . . . . . . . . . . 56
3.3.4 Superci di snervamento multifalda . . . . . . . . . . . . . . . . . . . . . . 58
3.3.5 Lalgoritmo numerico di ritorno . . . . . . . . . . . . . . . . . . . . . . . . 61
3.3.6 Gli indicatori di singolarit`a . . . . . . . . . . . . . . . . . . . . . . . . . . 64
3.3.7 Conseguenze della plasticit` a nonassociata . . . . . . . . . . . . . . . . . . 69
3.3.8 Il modello hardeningsoftening per i materiali granulari . . . . . . . . . . 71
3.3.9 Scelta opportuna del parametro di incrudimento . . . . . . . . . . . . . . 76
3.3.10 Equazioni della piramide inversa . . . . . . . . . . . . . . . . . . . . . . . 79
3.4 Stato Critico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3.4.1 CamClay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
3.4.2 CamClay modicato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
3.4.3 Il modello elastoplastico con condizione di stato critico alla MohrCoulomb 88
4 Sperimentazione 106
4.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Conclusioni 106
Bibliograa 106
II
Capitolo 1
Plasticit`aaspetti teorici e
computazionali
1.1 Introduzione
Laggettivo plastico deriva dal verbo greco , che signica plasmare; esso cos` descrive
i materiali come i metalli duttili, le argille, gli stucchi, che hanno propriet` a tali che i corpi cos-
tituiti da essi possono subire facilmente cambiamenti di forma attraverso lapplicazione di forze
opportunamente dirette, e mantenere la loro nuova forma dopo la rimozione di tali forze. Natu-
ralmente tali forze debbono avere suciente intensit`a, ma spesso questa `e ottenibile abbastanza
facilmente, e anch`e loggetto possa avere un valore di utilit`a deve essere indurito(hardening),
per esempio attraverso lesposizione allaria o attraverso lapplicazione di calore, come avviene
per le caramiche e i polimeri termoindurenti. Altri materialicirca tutti i metallisono abbas-
tanza duri alle temperature ordinarie e possono avere bisogno di essere rammolliti (softening),
per essere lavorati.
Generalmente si osserva che le considerevoli deformazioni che caratterizzano un processo di
formazione plastica sono spesso accompagnate da esigue, se ci sono, variazioni di volume. Di
conseguenza la deformazione plastica `e principalmente una distorsione, e delle tensioni prodotte
allinterno delloggetto dalle forze applicate sul contorno, `e il loro deviatore che f`a la maggior
parte del lavoro. Una prova diretta delle caratteristiche plastiche di un materiale potrebbe
cos` essere fornita dallapplicazione di forze che generino uno stato tensionale di taglio. In un
materiale soce, semi-uido, come largilla, o il terreno in generale, questo pu` o essere prodotto
attraverso una prova di taglio diretto come avviene nello shear-box test. In solidi duri come
i metalli, il solo esperimento in cui un taglio semplice uniforme `e prodotto, `e la torsione di un
tubo a parete sottile, e questo non `e sempre agevole da realizzare. Un test pi` u semplice `e il test
di trazione.
Questi test sono utilizzati per denire delle relazioni sperimentali tra le tensioni e le de-
formazioni. Vi `e quindi la necessit` a, in alcuni ambiti, di caratterizzare il comportamento del
materiale in maniera pi` u realistica di ci` o che si ottiene con la semplice descrizione elasti-
1
Plasticit` aaspetti teorici e computazionali 2
ca. Dobbiamo quindi pensare ad una descrizione inelastica, in cui la plasticit`a trova una sua
collocazione e ne discende come caso particolare.
Se pensiamo alla denizione (Cauchy) di un corpo elastico come un corpo in cui lo stato di
deformazione, in ogni punto, `e completamente determinato dalle condizioni attuali di tensione
e di temperatura, viene naturale pensare ad un corpo inelastico come uno in cui lo stato di
deformazione `e inuenzato da qualche altra cosa oltre alle tensioni correnti ed alla temperatura.
Si potrebbe pensare che questa qualche altra cosa sia la storia passata di tensioni e temperatura
nel punto. A questo proposito a partire dal 1960 `e stata sviluppata una teoria basata sullanalisi
funzionale, conosciuta come teoria dei materiali con memoria. Quando il comportamento `e
lineare la dipendenza dello stato corrente di deformazione dalla storia di tensione(e viceversa), `e
esprimibile esplicitamente, in questo caso si entra nel campo della teoria della viscoelasticit`a
lineare.
Un modo in cui la storia inuenza la relazione fra deformazioni e tensioni `e attraverso la
velocit` a di applicazione delle forze (rate-sensitivity): le deformazioni prodotte in un proces-
so di carico lento sono diversequasi certamente maggioridi quelle prodotte da una rapida
sollecitazione. Una manifestazione particolare di tale sensibilit` a consiste nel fatto che la de-
formazione in generale aumenta nel tempo sotto uno stato costante di sollecitazioni, eccetto
probabilmente in condizioni idrostatiche, e questo fenomeno viene chiamato usso nei uidi o
creep nei solidi. In generale tale sensibilit` a alla velocit` a aumenta con la temperatura, quindi quei
materiali che, in tempi limitati di osservazione, appaiono elastici in un certo range di temper-
atura, diventano fortemente inelastici alle alte temperature. Nei metalli il creep `e un importante
fattore di progetto alle temperature elevate, mentre non lo `e aatto alle temperature ordinarie.
Se deformazioni e tensioni possono essere interscambiate nella precedente discussione, allora,
poiche una pi` u bassa velocit`a implica maggiori deformazioni a parit`a di tensioni, in accordo, in
un processo lento, dovremmo avremo un minore stato tensionale a parit` a di deformazioni. In
generale le sollecitazioni diminuiscono nel tempo a deformazioni costanti, il fenomeno `e noto
come rilassamento.
La rate-sensitivity di molti materiali: polimeri, asfalti, conglomerati, pu`o essere descritta, con
certi limiti, nellambito della teoria lineare. Linelasticit` a dei metalli tende ad essere altamente
non lineare poiche il loro comportamento, sensibilmente lineare nellambito di un certo intervallo
di tensioni, diventa fortemente dipendente dalla storia al di fuori di tale intervallo. Quando il
limite di tale intervallo (limite elastico) viene raggiunto allaumentare delle tensioni, il materiale
`e detto snervato (yielding). Quando lintervallo elastico forma una regione nello spazio delle
tensioni, essa `e chiamata regione elastica ed il suo contorno supercie di snervamento.
1.2 Inelasticit`a e Variabili Interne
1.2.1 Variabili interne
Una maniera alternativa di rappresentare questa qualche altra cosa `e attraverso un vettore
di variabili, q
1
, ..., q
n
, in modo che le deformazioni dipendano da tali ulteriori variabili oltre che
dalle tensioni e dalla temperatura. Tali variabili vengono chiamate variabili interne (o nascoste)
Plasticit` aaspetti teorici e computazionali 3
e possono essere quantit`a scalari o tensoriali di rango 2. Le deformazioni sono quindi espresse
in una forma
= (, T, q)
La presenza di variabili addizionali nelle relazioni costitutive richiede equazioni costitutive
addizionali. Le equazioni che sono postulate per un corpo inelastico rate-sensitivity riettono
lipotesi che, se lo stato locale che determina le deformazioni `e denito da , T, q, allora lin-
cremento delle variabili interne `e determinato solo dallo stato locale e non dallincremento dello
stesso:
q
= g
(, T, q) (1.1)
Le equazioni del tipo (1.1) sono note come equazioni di evoluzione o equazioni incre-
mentali per le variabili interne q
.
1.2.2 Decomposizione delle deformazioni
Per corpi inelastici sottoposti a deformazioni innitesime, `e quasi universalmente accettato che
il tensore delle deformazioni pu`o essere decomposto additivamente in una deformazione elastica
e
ed in una deformazione inelastica
i
:
ij
=
e
ij
+
i
ij
(1.2)
Si assume lesistenza di una energia potenziale (
e
, q) tale che
ij
(
e
, q) = /
e
ij
. Da ci` o
consegue la simmetria della matrice elastica tangente C
ijhk
(
e
, q) =
ij
/
hk
cio`e
C
ijhk
= C
hkij
.
La dipendenza del tensore di elasticit`a dal set di variabili interne permette di tenere conto di
fenomeni di danneggiamento. Allora, per quanto riguarda la parte elastica
e
ij
= C
1
ijhk
hk
.
1.2.3 La natura delle variabili interne
In linea di principio esse possono essere rappresentate da qualsiasi grandezza che, in aggiunta alle
deformazioni (o alle tensioni) e alla temperatura, denisca lo stato locale in un piccolo intorno
di un continuo. Le stesse componenti
i
, possono essere incluse nelle variabili interne.
Come regola generale le variabili interne possono essere di due tipi. Da una parte possono
essere variabili siche in grado di descrivere aspetti locali della struttura sico-chimica che
possono cambiare spontaneamente (estensione di reazioni chimiche, densit`a relativa delle diverse
fasi, densit` a di difetti strutturali). Daltra parte esse possono essere dei costrutti matematici,
allora vengono chiamate variabili fenomenologiche. Le
i
stesse o gli spostamenti di uno stantuo
in un modello viscoelastico rientrano in questa classe. In questo caso la dipendenza funzionale
delle deformazioni (tensioni), dalle variabili interne e dalle relative equazioni incrementali, sono
assunte a priori.
Plasticit` aaspetti teorici e computazionali 4
Nel pi` u semplice modello costitutivo descrivente materiali inelastici non lineari, le variabili
interne sono assunte costituite dalle
i
e da una variabile addizionale , chiamata variabile di
incrudimento (hardening). Lequazione incrementale per `e inoltre assunta in modo che = 0
ogniqualvolta
i
= 0, ma in un processo ciclico alla ne del quale
i
ritorna al suo valore originale,
dovr`a risultare cambiato. Usualmente `e denito in modo che > 0 ogniqualvolta
i
6= 0.
Due denizioni comunemente usate per sono, il lavoro inelastico, denito come
=
Z
D
i
dt
def
= W
i
(1.3)
dove D
i
def
=
ij
ij
e, la deformazione inelastica equivalente (o eettiva),
=
Z
r
2
3
i
ij
i
ij
dt
def
=
i
(1.4)
La ragione del termine
2
3
(Odqvist, 1933) nella precedente denizione, `e la seguente: se un
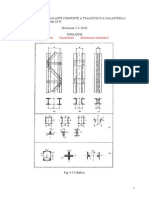
Figura 1.1: Ciclo chiuso: la deformazione inelastica ritorna a zero alla ne del ciclo ma la variabile interna pu`o
essere dierente.
provino di materiale isotropo, caratterizzato da incompressibilit`a inelastica (
i
kk
= 0) `e soggetto
ad uno stato tensionale di compressione (o di trazione), allora il tensore delle deformazioni
inelastiche assume la forma
i
=
i
0 0
0
1
2
i
0
0 0
1
2
i
Plasticit` aaspetti teorici e computazionali 5
in modo che
q
2
3
i
ij
i
ij
|
i
|.
In pratica c`e poca dierenza nel modo in cui i due tipi di variabili interne vengono utiliz-
zate. Sia che le funzioni coinvolte siano ricavate da una teoria sica o da ipotesi, esse contengono
parametri che devono essere valutati dal confronto delle predizioni teoretiche con risultati speri-
mentali. In eetti nel caso della plasticit`a dei metalli, la teoria sica ha avuto notevole successo
nella comprensione qualitativa del fenomeno, ma il tentativo di generare equazioni costitutive
in termini di variabili siche non ha fornito risultati utilizzabili.
1.2.4 Legge di usso e potenziale di usso
Prescindendo dal fatto che le componenti di deformazione inelastica possano o meno essere di-
rettamente incluse fra le variabili interne, `e sempre possibile denire una legge di usso, cio`e una
legge incrementale per
i
. Applicando la regola di derivazione composta alla basilare assunzione
i
=
i
(q), risulta che
i
ij
= g
ij
(, T, q),
dove
g
ij
=
X
i
ij
q
,
essendo g
il membro a destra dellequazione(1.1).
Soprattutto per convenienza, si assume spesso che le g
ij
possano essere derivate da una
funzione scalare g(, T, q), chiamata potenziale di usso, attraverso una relazione del tipo
g
ij
=
g
ij
,
essendo (, T, q) una funzione scalare positiva.
Il potenziale di usso g `e comunemente assunto essere funzione solo delle tensioni, la forma
usata pi` u frequentemente `e g(, T, q) = J
2
, dove J
2
`e il secondo invariante del deviatore delle
tensioni. Poiche
ij
J
2
=
s
kl
ij
s
kl
1
2
s
mn
s
mn
=
ik
jl
1
3
ij
kl
s
kl
= s
ij
segue che la legge di usso assume la forma
i
ij
= (, T, q)s
ij
.
Una conseguenza di tale legge di usso `e che la deformazione inelastica `e isovolumetri-
ca, o, equivalentemente, che la deformazione di volume `e puramente elastica, un risultato
frequentemente osservato nei materiali reali.
Plasticit` aaspetti teorici e computazionali 6
1.3 Viscoplasticit`a
1.3.1 Premessa
Si deve puntualizzare che mentre lo snervamento `e la caratteristica pi` u evidente del compor-
tamento plastico, lesistenza di una ben denita tensione di snervamento `e leccezione e non la
regola. Avviene, tuttavia, che lacciaio dolce, che appartiene a questa eccezionale classe, `e uno
dei metalli pi` u comunemente usati, e i tentativi di una descrizione teorica del suo comportamento
hanno preceduto quelli relativi ad altri metalli; tali tentativi naturalmente hanno incorporato un
criterio di snervamento come comportamento essenziale di quella che si `e delineata come teoria
della plasticit`a, come pure uno sviluppo successivo, conosciuto come teoria della viscoplasticit`a,
che prende in ulteriore considerazione la dipendenza dal tempo.
Molti studiosi di meccanica dei solidi intendono il termine viscoplasticit` a nel suo signica-
to classico, cio`e per denotare la descrizione di un comportamento rate-dependent con un ben
denito criterio di snervamento, questa accezione non `e universale. Alcuni usano riferire tale
termine a modelli di comportamento viscoelastico altamente non lineare, privi di un dominio
elastico, questo `e caratteristico dei metalli, specialmente alle alte temperature. Entrambi i mod-
elli sono delle sottoclassi dei modelli a variabili interne. La plasticit` a rate-independent pu`o essere
derivata, come vedremo, come caso limite della viscoplasticit`a classica.
1.3.2 Supercie di snervamento
Se esiste una funzione continua f(, T, q), tale che esiste una regione nello spazio delle tensioni in
cui (ssati T e q), f(, T, q) < 0, e tale che il tensore dellincremento di deformazione inelastico
i
= 0 in tale regione ma non al fuori di essa, allora tale regione costituisce il range elastico e
f(, T, q) = 0 denisce la supercie di snervamento nello spazio delle tensioni; lorientazione di
tale supercie `e tale che la zona elastica costituisce il suo interno. Un materiale che possiede
tale funzione di snervamento `e viscoplastico in senso stretto. Tale denizione non prevede
lannullamento di tutti gli incrementi delle variabili interne q
nella regione elastica; daltronde la
descrizione di alcuni processi (strain-aging) richiedono levoluzione della struttura locale mentre
il materiale `e libero da tensioni. Tuttavia anche possano avvenire tali variazioni di assetto
locale bisogna che intercorrano dei tempi, fra i successivi caricamenti, dellordine dei tempi
richiesti dal rilassamento. Una scelta di semplicit`a, pensando a processi pi` u rapidi, prevede
tuttavia che lincremento di tutte le variabili interne sia nullo allinterno dello spazio elastico
e che quindi f(, T, q) 0 g
(, T, q) = 0, = 1, ..., n. In particolare questa denizione
include tutti quei modelli (Perzyna, 1971) in cui lincremento delle variabili interne dipende
linearmente da
i
.
Seguendo tale approccio conviene ridenire le g
come g
= h
, dove `e una funzione
scalare che rappresenta le caratteristiche incrementali(viscosit`a) e di snervamento del materiale,
tale che = 0 quando f 0 e > 0 quando f > 0 (Perzyna, 1963).
Plasticit` aaspetti teorici e computazionali 7
1.3.3 Incrudimento
La dipendenza della supercie di snervamento f dalle variabili interne q
descrive le cosiddette
propriet`a di incrudimento del materiale. La relazione fra questa dipendenza e il comportamento
del materiale pu` o essere compresa considerando uno stato di stress vicino alla supercie di
snervamento ma al di fuori di essa, cio`e f(, T, q) > 0. In particolare consideriamo il caso di
uno stato tensionale monoassiale in un provino di materiale la cui curva tensionideformazioni
statica `e descritta in gura 1.2, la quale mostra entrambe le porzioni ascendente (hardening) e
discendente (softening). Se il materiale `e viscoplastico, allora il suo comportamento `e elastico
nei punti sotto la curva, e viscoelastico per i punti sopra la curva, cio`e, tale curva rappresenta
la supercie di snervamento. Se la tensione `e mantenuta costante ad un valore al di sopra della
Hardening Softening
Creep
Curva Statica
Creep
A B
Figura 1.2: Hardening e softening in viscoplasticit` a: relazione tra creep e curva statica.
curva statica, si produce creep, riscontrabile in un incremento di deformazione come mostrato
dalla linea trattegiata orizzontale. Se il punto iniziale si trova al di sopra della porzione hard-
ening, come A, allora il creep tende verso la curva statica ed `e limitato, mentre se `e, come B,
sopra la zona softening, allora il creep tende ad allontanarsi dalla curva statica e il processo non
`e limitato. Poich`e i punti sulla curva sono in eetti quelli sulla supercie di snervamento,
noi possiamo generalizzare dal caso monoassiale, come segue: creep verso la supercie di sner-
vamento, caratterizzante lhardening, signica che a valori costanti di tensione e temperatura,
la funzione f decresce da un valore positivo verso zero, cio`e,
f < 0. Similmente, il softening `e
caratterizzato da
f > 0. Ma
f|
(=const,T=const)
=
X
f
q
=
X
f
q
= H,
Plasticit` aaspetti teorici e computazionali 8
dove
H
def
=
X
f
q
. (1.5)
Cos` H > 0 e H < 0 per materiali hardening e softening (oppure fasi hardening e softening dello
stesso materiale), rispettivamente. Il caso limite H = 0, che si presenta in particolare quando f
`e indipendente dalle q
, descrive un materiale perfettamente plastico.
1.3.4 Potenziale viscoplastico
Introduciamo la quantit`a tensoriale h denita come
h
ij
=
X
i
ij
q
.
Le equazioni di usso sono allora
i
ij
= h
ij
. (1.6)
Se esiste una funzione g(, T, q), continua e dierenziabile rispetto a dovunque f(, T, q) >
0, tale che
h
ij
=
g
ij
,
allora g `e chiamato potenziale viscoplastico.
1.3.5 Transizione alla plasticit`a non viscosa
Consideriamo il generico modello viscoplastico nora discusso, sia crescente con f. Le equazioni
incrementali (1.6) indicano che la velocit`a delle deformazioni inelastiche aumenta con la distanza
dalla supercie di snervamento. Se tale processo `e molto lento, allora si svolge molto vicino, ma
al di fuori della supercie di snervamento, di conseguenza `e molto piccolo. Al limite, come
f 0
+
noi possiamo eliminare (e quindi non preoccuparci pi` u della velocit` a del processo),
come segue: se f rimane uguale a zero, allora
f =
f
ij
ij
+
X
f
q
= 0.
Se deniamo
f=
f
ij
ij
ed assumiamo H > 0 (hardening), con H denito dallequazione (1.5), allora la condizione
f =
f H = 0 tale che > 0 `e possibile solo se
f> 0. Lultima condizione `e chiamata
caricamento(loading). Deniamo loperatore hi tale che
hxi =
0 per x 0
x per x > 0
Plasticit` aaspetti teorici e computazionali 9
allora, ritornando alla condizione precedente possiamo scrivere
=
1
H
h
fi,
e quindi
q
=
1
H
h
fih
. (1.7)
Entrambi i membri dellequazione (1.7) sono delle derivate rispetto al tempo, quindi un cam-
biamento nellampiezza del tempo non inuisce sullequazione. Tale equazione `e cos` chiamata
indipendente dal tempo (rate-independent). Se si assume che questa equazione descriva il com-
portamento del materiale su un ampio intervallo di velocit`a di carico, allora ci si riferisce alla
plasticit`a indipendente dal tempo altrimenti chiamata plasticit`a non viscosa, o semplicemente
plasticit`a. In tal caso la notazione
p
prender`a il posto delle
i
, e ci si riferir` a ad esse come alle
deformazioni plastiche. Le equazioni di usso possono essere cos` riscritte
p
ij
= h
ij
. (1.8)
Per scopi computazionali, tuttavia, `e a volte vantaggioso rimanere nellambito della viscoplastic-
it`a senza attuare la completa transizione, anche quando il problema da risolvere `e trattato come
indipendente dal tempo. In altre parole un materiale viscoplastico ttizio con viscosit` a molto
ridotta, viene associato al dato materiale non viscoso, e gli incrementi delle variabili interne
saranno rappresentati da una legge di evoluzione del tipo
q
=
hfi
ponendo la viscosit` a come costante. Il calcolo `e allora eseguito sotto carichi e condizioni al
contorno indipendenti dal tempo nch`e tutti gli incrementi di deformazione svaniscono Cf. [13].
1.4 Plasticit`a Classica
1.4.1 Legge di usso
Entrando pi` u nel merito della trattazione classica della plasticit` a, riscriviamo le equazioni di
usso come
p
ij
=
h
ij
, (1.9)
dove
1
H
h
fi , f = 0
0 , f < 0
(1.10)
con H denito dallequazione (1.5). Lequazione (1.7) analogamente diventa
q
=
h
.
Plasticit` aaspetti teorici e computazionali 10
Se f/q
0 allora , come gi` a menzionato, il comportamento del materiale `e perfettamente
plastico. In questo caso H = 0, ma
f=
f, e quindi la condizione
f> 0 `e impossibile. La defor-
mazione plastica allora avviene solo se (f/
ij
)
ij
= 0 (caricamento neutro), e la denizione
(1.10) non pu`o pi` u essere usata. In questo caso invece,
`e una quantit`a positiva indeterminata
quando f = 0 e (f/
ij
)
ij
= 0, ed `e zero altrimenti.
In entrambi i casi,
e f obbediscono alle condizioni di KuhnTucker
f = 0,
0, f 0. (1.11)
La specicazione della funzione tensoriale h nella equazione (1.9), `e conosciuta come legge
di usso, e, se esiste una funzione g (analoga al potenziale viscoplastico) tale che h
ij
= g/
ij
,
allora questa funzione `e chiamata potenziale plastico.
1.4.2 Work-hardening
Il criterio di hardening H > 0, e il corrispondente criterio H = 0 per la plasticit` a perfetta
e H < 0 per il softening sono stati deniti nella (1.5) per i materiali viscoplastici sulla base
di un comportamento rate-dependent per stati tensionali esterni alla supercie di snervamento.
Una derivazione alternativa pu`o essere inquadrata interamente nel contesto della plasticit`a rate-
independent.
Per un assegnato q, f(, q) = 0 `e lequazione che descrive la supercie di snervamento nello
spazio delle tensioni. Se, con riferimento alla g.1.2, f(, q) = 0 e
f|
=const
< 0 (cio`e H > 0)
ad un tempo t, allora al tempo t +t avremo f(, q + qt) < 0; la supercie di snervamento,
tramite lincremento q, si sar` a spostata in modo che il punto tensione sar`a di nuovo interno.
In altre parole, H > 0 implica che, almeno localmente, la supercie di snervamento subisce
una espansione nello spazio delle tensioni. Tale espansione `e equivalente, nel caso uniassiale,
ad una pendenza positiva della curva . Inversamante, una contrazione della supercie
di snervamento denota work-softening, e una supercie di snervamento stazionaria plasticit` a
perfetta.
Nel pi` u semplice modello plastico le variabili interne sono prese come
1. le stesse componenti di deformazione plastica
p
ij
2. la variabile denita dalla (1.3) o dalla (1.4)
Allora la funzione di snervamento assume la forma
f(,
p
, ) = F( (
p
)) k(),
sia lincrudimento isotropo che quello cinematico, come verr`a discusso in dettaglio, possono
essere cos` descritti; lincrudimento `e isotropo se = 0 e k/ > 0, e puramente cinematico
se k/ = 0 e 6= 0. La condizione k/ = 0 e = 0 rappresenta plasticit`a perfetta. Il
modello pi` u semplice di incrudimento cinematico (Melan, 1938), prevede (
p
) = c
p
, dove c `e
una costante.
Plasticit` aaspetti teorici e computazionali 11
j
f(,q dq)=0 se >0
f(,q)=0
f(,q dq)=0 se <0
i
Figura 1.3: Hardening e softening in plasticit`a: movimenti della supercie di snervamento nello spazio delle
tensioni.
1.4.3 Postulato di Drucker
Una denizione pi` u limitata di work-hardening venne formulata da Drucker, generalizzando
le caratteristiche delle curve monoassiali. Con una singola componente di tensione ,
lincremento di deformazione plastica associata
p
, soddisfa le relazioni
p
=
0, materiale hardening,
= 0, materiale perfettamente plastico,
0, materiale softening.
Le diseguaglianze non cambiano se gli incrementi di tensione e di deformazione sono moltiplicati
per lincremento di tempo dt, quindi continuano a valere sotto la forma dd. Questo prodotto
ha le dimensioni di un lavoro per unit` a di volume, e gli venne dato da Drucker la seguente
interpretazione:
Se un provino di volume unitario soggetto ad uno stato di tensione monoassiale pre-
senta inizialmente una tensione ed una deformazione plastica
p
, e se un agente
esterno (indipendente da ci`o che ha prodotto i carichi attuali) applica lentamente un
incremento di carico provocando un incremento di tensione d (che causa incrementi
di deformazioni elastiche e plastiche d
e
e d
p
rispettivamente) e viene successiva-
mente rimosso, sempre lentamente, allora dd = d(d
e
+d
p
) `e il lavoro compiuto
dallagente esterno nel corso dellincremento del carico, e dd
p
`e il lavoro compiuto
nel ciclo conseguente allapplicazione e alla rimozione dellincremento di tensione.
Plasticit` aaspetti teorici e computazionali 12
d > 0
d = 0
d > 0
p
d < 0
d = 0
d < 0
p
d < 0
d > 0
j
j
+d
Figura 1.4: Postulato di Drucker: a) nel piano monoassiale; b) nello spazio delle tensioni
Poich`e dd
e
`e sempre positivo e per un materiale work-hardening dd
p
0, segue
che per tale materiale dd > 0.
Di conseguenza Drucker denisce un materiale plastico work-hardening (o stabile) come
uno in cui il lavoro compiuto durante lincremento di carico `e positivo, e il lavoro fatto in un
ciclo di caricoscarico `e non-negativo; questa denizione `e generalmente nota come postulato
di Drucker.
Avendo denito lincrudimento in termini di lavoro, si pu` o estendere la suddetta denizione
ad un generico stato tridimensionale di tensionideformazioni
d
ij
d
ij
> 0 e d
ij
d
p
ij
0
Leguaglianza `e vericata solo se d
p
= 0. Per materiali perfettamente plastici, le diseguaglianze
di Drucker si scrivono d
ij
d
ij
0 e d
ij
d
p
ij
= 0. Cos` la relazione
ij
p
ij
0 (1.12)
conosciuta come diseguaglianza di Drucker `e valida per materiali work-hardening e perfet-
tamente plastici. La (1.12) indica inoltre che la deformazione plastica non pu`o essere opposta
allincremento dei tensione. Il postulato di Drucker ha una portata pi` u ampia se si considera che
lincremento di tensione prodotto dallagente esterno pu`o non essere innitesimo. In particolare
la tensione iniziale
pu`o essere interna al dominio elastico, o in un punto sulla supercie lon-
tano da , e il processo seguito dalla causa esterna pu` o consistere in un caricamento elastico
no alla tensione sulla supercie di snervamento, un piccolo incremento d che produce in-
cremento di deformazione plastica d
p
e inne un ritorno elastico su
; il percorso `e illustrato
Plasticit` aaspetti teorici e computazionali 13
in gura Semplicando il lavoro elastico lungo
, il lavoro compiuto dallagente esterno `e
(
ij
ij
)d
p
ij
. Il postulato di Drucker conseguentemente implica
(
ij
ij
)
p
ij
0. (1.13)
1.4.4 Conseguenze del postulato di Drucker
La disequazione (1.13) ha conseguenze della massima importanza nella teoria della plasticit`a.
Rappresentiamo la stessa in forma tensoriale
(
)
p
0. (1.14)
Supponiamo prima che la supercie di snervamento `e dovunque regolare (smooth), in modo
che un ben denito iperpiano tangente e una direzione normale esiste in ogni punto, `e chiaro,
dalla rappresentazione bidimensionale in gura (a), che, anch`e la (1.13) sia valida per tutte le
interne al dominio, lincremento di deformazione plastica
p
deve essere rivolto nella direzione
della normale esterna alla tangente nel punto ; questa conseguenza `e nota come principio di
normalit`a. Ma come si pu` o vedere dalla gura (b), se
pu`o giacere dalla parte esterna
del piano tangente (nel verso della normale), il suddetto principio `e violato. Allora lintera
regione elastica deve appartenere ad un unico semispazio. Si deduce allora che la supercie di
snervamento `e convessa. Deniamo ora D
p
(
p
, q) come
d
*
p
p
d
j
i i
Figura 1.5: Propriet`a della supercie di snervamento con legge di usso associata: a) normalit`a; b) convessit` a.
D
p
(
p
, q) = max
ij
p
ij
, (1.15)
Plasticit` aaspetti teorici e computazionali 14
essendo il massimo denito tra tutte le
tale che f(
, q) 0. Segue allora dalla (1.13) che
ij
p
ij
= D
p
(
p
, q). (1.16)
Per chiarire il motivo per cui D
p
(
p
, q) dipende solo da
e da q e non da , notiamo che, se
la supercie di snervamento `e strettamente convessa(sia che ci si trovi su un punto regolare o
singolare), allora c`e un solo stato di tensione che corrisponde ad una data direzione normale
nello spazio delle tensioni e quindi ad una data
p
. Se la supercie di snervamento ha una zona
piatta, allora tutti i punti di tale zona hanno la stessa normale, cio`e dierenti stati di stress
corrispondono allo stesso
p
, ma il prodotto scalare
p
=
ij
p
ij
`e lo stesso per ognuno di loro.
D
p
(
p
, q) prende il nome di dissipazione plastica. La (1.13) pu`o scriversi allora
D
p
(
p
, q)
ij
p
ij
, (1.17)
formalizzazione del principio della massima dissipazione plastica, Mises(1928), Taylor(1947),
Hill (1948).
1.4.5 Normalit`a
Discutiamo in dettaglio la legge di normalit`a. In ogni punto della supercie di snervamento
f(, q) dove la supercie `e regolare, la normale esterna `e proporzionale al gradiente di f(nello
spazio delle tensioni), e quindi possiamo esprimere la legge di normalit`a come
h
ij
=
f
ij
(1.18)
dove h
ij
`e il tensore che appare nellequazione di usso (1.9). La (3.189) esprime il fatto che la
funzione f di snervamento `e essa stessa un potenziale plastico, e quindi la legge di normalit`a `e
inoltre chiamata una legge di usso associata con il criterio di snervamento, o brevemente una
legge di usso associata. Una legge di usso derivabile da un potenziale plastico g distinto da
f(pi` u precisamente tale che g/
ij
non `e proporzionale a f/
ij
) `e viceversa non associata.
Se la supercie di snervamento non `e dovunque regolare ma presenta uno o pi` u punti singolari,
in cui la direzione della normale non `e unica, allora in tali punti la
p
deve giacere nel cono
formato dalle normali che si incontrano in tale punto. Lequazione (3.189) pu`o essere ancora
utilizzata in tal caso, a patto di interpretare propriamente le derivate parziali rimpiazzando il
concetto di gradiente con quello di subgradiente, tale formulazione `e dovuta a Moreau. Una
maniera alternativa di trattare superci di snervamento singolari venne proposta da Koiter, il
quale suppose la supercie di snervamento formata da un certo numero di superci regolari,
ognuna denita da una equazione del tipo f
k
(, q) = 0 (k = 1, ..., n); il dominio elastico `e allora
lintersezione delle regioni denite da f
k
(, q) < 0, e `e sulla supercie se almeno una delle f
k
`e
vericata, e si trova su un punto singolare di essa se due o pi` u f
k
risultano vericate. Lequazione
(3.189) `e allora sostituita dalla
h
ij
=
X
k
k
f
k
ij
(1.19)
Plasticit` aaspetti teorici e computazionali 15
i
j
p
d
Figura 1.6: Propriet`a della supercie di snervamento con legge di usso associata: c) singolarit`a.
essendo la sommatoria estesa a tutti gli indici k tali che f
k
(, q) = 0, e gli
k
sono numeri non
negativi che possono, senza perdita di generalit`a, soddisfare la
X
k
k
= 1. (1.20)
1.5 Analisi ElastoPlastica al Passo
La strategia numerica al passo utilizzata cerca di risolvere il problema elasto-plastico ponendolo
nella forma seguente: assegnato un programma di carico p(), determinare una successione
sucientemente tta di punti (u
j
,
j
) del percorso di equilibrio della struttura che permetta
una sua accurata ricostruzione per interpolazione. Il problema pu` o essere decomposto in due
sottoproblemi pi` u adatti ad una risoluzione di tipo numerico:
Note le condizioni iniziali ed assegnato il vettore u degli spostamenti di ne passo, deter-
minare il corrispondente vettore s(u) delle forze nodali interne di ne passo.
Assegnato il vettore p dei carichi nodali di ne passo, determinare u tale che risulti
vericata la condizione di equilibrio:
s(u) = p
Il primo sottoproblema richiede una descrizione della risposta elastoplastica della struttura
mentre il secondo corrisponde ad un problema astratto di soluzione di una equazione nonlineare
implicita.
Plasticit` aaspetti teorici e computazionali 16
1.5.1 Risposta elastoplastica
Il primo passo della strategia sopra esposta comporta la determinazione del vettore della risposta
nodale della struttura. La valutazione di tale vettore viene eettuata elemento per elemento,
mediante una integrazione numerica per punti di Gauss, una volta noto su questi ultimi il valore
della tensione . , ovviamente, `e la soluzione elastoplastica del problema che si considera e
deve essere calcolata, a partire dalle condizioni iniziali note (u
0
,
0
), per un incremento assegnato
dello spostamento u. Si pregura quindi una strategia di tipo strain driven da applicare su
ciascun punto di Gauss dellelemento:
Valutazione del predittore elastico. In funzione della tensione iniziale
0
e dellincremento
u si valuta il predittore elastico:
el
=
0
+(u) (1.21)
dove (u) `e lincremento elastico di tensione causato dallincremento di spostamento
u.
Rientro nel dominio elastico. Se il predittore elastico non `e ammissibile plasticamente si
calcola la soluzione elasto-plastica mediante un algoritmo di ritorno [28] sul dominio
elastico. Tale algoritmo ovviamente dipende dal tipo di materiale in esame e quindi dal
tipo di legame nonlineare che lo caratterizza (elastoplastico perfetto, incrudente o altro).
Della strategia appena descritta la fase di rientro nel dominio elastico `e la pi` u impegnativa.
Nel seguito verr` a approfondito questo aspetto, partendo dal pi` u semplice dei criteri di plastic-
it`a (Mises) caratterizzato da una funzione ovunque regolare, per passare poi a criteri del tipo
multifalda (MohrCoulomb), propriamente utilizzati in campo geotecnico.
1.5.2 Elastoplasticit`a olonoma: il principio di HaarK`arm`an
La formulazione incrementale del problema elastoplastico nora dicusso, consente di con-
seguire risultati globali di grande interesse ma certamente non fornisce uno strumento facilmente
maneggevole se si `e interessati alla ricostruzione, in termini niti, della risposta nonlineare di
una struttura generica soggetta ad un assegnato programma di carico. Infatti per la complessit` a
delle equazioni coinvolte, equazioni dierenziali e disequazioni, e lirregolarit` a della soluzione
cercata, discontinuit`a nella derivata, risulta veramente arduo risolvere il problema posto in ter-
mini di incrementi innitesimi. Pertanto `e di fondamentale importanza cercare di impostare il
problema in una forma olonoma, ovvero nel modo seguente:
Dato uno stato iniziale (
0
,
0
), ed un assegnato incremento di carico p, determinare la
relativa soluzione elastoplastica di ne passo.
Come si vede il problema `e formulato solo in termini di condizioni iniziale e nale e manca del
tutto linformazione su come venga in eetti realizzato lincremento di carico (in realt` a necessaria
dato il carattere non reversibile del comportamento elastoplastico). Al suo posto `e presente
Plasticit` aaspetti teorici e computazionali 17
lipotesi che levoluzione del carico avvenga in modo sucientemente dolce tale da rendere ir-
rilevante linuenza delleettiva modalit` a di carico sul legame, espresso in termini niti, tra
incrementi di tensione e di deformazione. Nel caso di legame elastico perfettamente plastico
il suddetto approccio olonomo `e realizzabile ed una sua formulazione `e fornita dal principio di
HaarK` arm`an. Secondo lapproccio di HaarK`arm`an un modo per denire il comportamento
elastoplastico olonomo consiste semplicemente nellesprimere le equazioni della teoria incre-
mentale in termini di incrementi niti. In tal caso la soluzione elastoplastica `e caratterizzata
dalla seguente condizione di minimo nota come principio di HaarK` arm`an:
[] :=
1
2
Z
T
C
1
+
Z
p
0
(N)
T
w = min (1.22)
Oltre a ci` o la soluzione `e vincolata al rispetto delle condizioni:
: equilibrata , f() 0
p
0
rappresenta una distorsione anelastica iniziale. Il principio pu` o essere dimostrato in modo
semplice. Posto infatti:
=
e
+
p
, = C
e
, (
)
T
p
0
dove
p
=
p
p
0
, `e possibile esprimere una variazione del funzionale [] per una generica
variazione ammissibile della tensione rispetto alla soluzione elastoplastica :
=
Si ottiene quindi il seguente risultato:
=
Z
T
(
e
+
p
0
)
Z
(N)
T
w (1.23)
=
Z
T
Z
(N)
T
w
Z
p
(1.24)
=
Z
)
T
p
(1.25)
Essendo questultimo integrale strettamente non negativo ne risulta che la soluzione elasto
plastica corrisponde eettivamente ad un punto di minimo del funzionale (1.22). Il principio
pu`o essere perci` o enunciato nel modo seguente:
La soluzione elastoplastica minimizza lenergia complementare totale del sistema nel
rispetto delle condizioni di equilibrio e di ammissibilit`a plastica.
Lapproccio olonomo realizzabile mediante il principio di HaarK`arm`an trova comunque una
sua piena giusticazione, che altrimenti sarebbe assente, nella teoria dei percorsi estremali di
Ponter e Martin [11], vedi [31, 32] per i dettagli applicativi in ambito computazionale. Per
Plasticit` aaspetti teorici e computazionali 18
materiali elastici perfettamente plastici infatti, la soluzione estremale coincide con la soluzione
fornita dal principio di HaarK`arm`an. Si prola quindi una strategia di soluzione del problema
elastoplastico basata proprio su tale principio. Il principio di HaarK`arm`an, pu`o essere per` o
riscritto in una forma pi` u idonea ad una implementazione di tipo numerico. Infatti se si indica
con
el
la soluzione elastica ottenuta a partire dalle condizioni assegnate di inizio passo allora
la soluzione elastoplastica deve soddisfare la seguente condizione di minimo:
[] :=
1
2
Z
(
el
)
T
C
1
(
el
) = minimo (1.26)
sotto le condizioni:
: equilibrata , f() 0
Il funzionale [] esprime quindi, in una metrica energetica, il quadrato della distanza tra e
el
. Il principio pu` o essere pertanto essere letto anche nel modo seguente:
Tra le soluzioni equilibrate e plasticamente ammissibili la soluzione elastoplastica `e la
pi` u vicina, (in una metrica data dellenergia di deformazione), alla soluzione elastica
el
dello stesso problema.
La strategia di rientro nel dominio elastico risulta quindi di facile applicazione in quanto
corrisponde al punto di tangenza tra due superci convesse: la frontiera del dominio elastico e
una linea di livello della energia di deformazione. Essendo questultima strettamente convessa `e
assicurata lunicit` a della soluzione.
1.5.3 Algoritmo numerico di ritorno
In ogni schema numerico impiegato per lanalisi di problemi elasto-plastici diventa necessario
integrare le equazioni costitutive che governano il comportamento del materiale, e la precisione
con cui viene eettuata tale fase del calcolo ha un diretto impatto sulla accuratezza globale
dellanalisi. Ricadono nellambito degli algoritmi return mapping il ben noto algoritmo di ri-
torno radiale per il criterio di von Mises, lalgoritmo closest point, di cui abbiamo gi` a visto
una interpretazione energetica parlando del principio di HaarK`arm`an, il quale generalizza ad
arbitrarie superci di snervamento convesse la legge di ritorno radiale, altri ancora sono stati
proposti, e Ortiz e Popov in [25] hanno mostrato come la maggior parte di essi possono essere
considerati come casi particolari degli algoritmi cosiddetti del punto medio e trapezoidale.
Essi si rivelano uno strumento valido nella soluzione di legami elasto-plastici abbastanza
semplici, anche per modelli con incrudimento, purch`e lineari. Tuttavia, quando la descrizione
del materiale diventa necessariamente pi` u sosticata, come nel caso del calcestruzzo, dei terreni,
dei metalli che presentano comportamenti elastici nonlineari, vengono introdotte leggi di usso
non associate e criteri di snervamento complessi. Poich`e tali algoritmi danno luogo a sistemi
di equazioni nonlineari da risolvere con procedure del tipo NewtonRaphson, la valutazione dei
gradienti delle direzioni di usso plastico, delle normali alle superci di snervamento, e di tutte
le quantit`a tensoriali richieste diventa un problema non certo banale che se possibile meglio
evitare.
Plasticit` aaspetti teorici e computazionali 19
Ortiz e Simo, in [26] e successivamente in [28], hanno proposto una nuova classe di algoritmi
di ritorno, seguendo una metodologia cosiddetta di splitting (scissione), dando luogo ad uno
strumento di portata pi` u ampia, potendo applicarsi agevolmente per modelli elastoplastici,
viscoplastici, con leggi di usso associate o non associate ed arbitrarie funzioni di snervamento
e leggi di incrudimento. Lalgoritmo `e formulato solo sulla base della funzione di snervamento,
la normale ad essa, la direzione del usso plastico e del modulo elastico tangente, senza in alcun
modo coinvolgere i loro gradienti. Nonostante ci` o la velocit` a di convergenza del processo `e
quadratica.
Limitiamo la scrittura formale delle equazioni al caso di interesse. Per la modellazione
elasto(lineare)plastica con generica legge di incrudimento e di usso plastico, le equazioni
costitutive possono essere scritte in forma incrementale
=
e
+
p
= C
e
p
=
r(, q)
q =
h(, q)
(1.27)
r `e la direzione di usso, h rappresenta il modulo plastico mentre lincremento del moltipli-
catore plastico
deve essere determinato nel rispetto del criterio di caricoscarico sintetizzabile
nelle equazioni di KuhnTucker
f(, q) 0
0
f
= 0
(1.28)
Le normali alla supercie di snervamento nello spazio delle tensioni e delle variabili in-
terne(plastiche), sono indicate rispettivamente con
(, q) =
f
(, q) =
f
q
(1.29)
Applichiamo adesso loperatore di splitting alle (1.27), decomponendole nelle rispettive parti
elastica e plastica. La prima costituisce la deformation driven
=
e
+
p
= d(t)
= C
p
= 0
q = 0
(1.30)
la seconda la correzione plastica
=
e
+
p
= 0
= C
p
p
=
r(, q)
q =
h(, q)
(1.31)
Plasticit` aaspetti teorici e computazionali 20
Si pu`o immediatamente notare che i due gruppi di equazioni si possono sommare ricostituendo il
sistema (1.27), e costituendo in pratica la denizione della metodologia predictorcorrector per
il calcolo della risposta nodale.
Le equazioni plastiche (3.52) si possono riorganizzare come segue
=
Cr(, q)
q =
h(, q)
(1.32)
o nella forma dierenziale
d
d
= Cr(, q)
dq
d
= h(, q)
(1.33)
che denisce un sistema di equazioni di rilassamento per le variabili di tensione e le variabili
interne. Se consideriamo un modello elastoplastico perfetto, r f/ , le traiettorie
denite dalle equazioni di rilassamento (1.33) seguono il percorso di pi` u ripida discesa(steepest
descent method) corrispondente alla supercie di snervamento f. Tale direzione, in ogni punto
nello spazio delle tensioni, `e calcolata dalla metrica denita dal modulo elastico C. Ritroviamo
qui il principio informatore dellalgoritmo closestpoint.
n
n+1 (predittore elastico)
n+1
percorso di ritorno
f = 0 (superficie di snervamento)
f = cost
Dominio
elastico
Figura 1.7: Interpretazione geometrica nel caso di plasticit` a perfetta. La direzione del ritorno , `e quella di
massima discesa, in termini di una metrica locale denita dal modulo di elasticit`a: = Cr .
Il processo di rilassamento `e eseguito iterativamente. Ad ogni passo delliterazione la funzione
di snervamento `e linearizzata intorno ai valori correnti delle variabili di stato
(i)
, q
(i)
,
Plasticit` aaspetti teorici e computazionali 21
f f(
(i)
, q
(i)
) +
f(
(i)
, q
(i)
)
(
(i)
) +
f(
(i)
, q
(i)
)
q
(q q
(i)
)
f
(i)
+
(i)
(
(i)
) +
(i)
(q q
(i)
),
(1.34)
inoltre le equazioni (1.33) possono essere discretizzate come segue
(i+1)
(i)
= Cr
(i)
q
(i+1)
q
(i)
= h
(i)
(1.35)
Combinando la (1.35) con la (1.34) ed eguagliando questultima a zero, si deduce lespressione
per la correzione del moltiplicatore plastico
=
f
(i)
(i)
Cr
(i)
(i)
h
(i)
(1.36)
Sostituendo tale valore nelle (1.35) si ottengono le correzioni delle rispettive variabili. Tale
processo incrementale `e suscettibile della seguente interpretazione geometrica:
la funzione di snervamento linearizzata (1.34) denisce una intersezione lineare (cut) con il piano
f = 0 in cui
(i)
e q
(i)
sono proiettati per denire la successiva iterazione
(i+1)
e q
(i+1)
. Tale
proiezione `e denita nella metrica del tensore elastico C.
Plasticit` aaspetti teorici e computazionali 22
n
n+1 = n+1
n+1
proiezione limite (tangente)
proiezioni
Dominio
elastico
(0)
n+1
(1)
n+1
(2)
Figura 1.8: Ad ogni passo le variabili corrette vengono computate proiettando le precedenti sulla traccia del
piano f = 0 della funzione di snervamento linearizzata nellintorno della stima corrente della soluzione. Al limite
questi tagli diventano tangenti alla supercie di snervamento e la convergenza `e quadratica(alla Newton-Raphson)
.
Plasticit` aaspetti teorici e computazionali 23
1.5.4 Soluzione iterativa dellequilibrio
La soluzione del secondo sottoproblema presente nella strategia adottata pu`o essere cercata
utilizzando diversi tipi di approcci. Ad esempio `e possibile procedere mediante algoritmi incre-
mentali con estrapolazione alla Eulero, oppure mediante un approccio di tipo NewtonRaphson
o, ancora, mediante il metodo dellarco di curva. Questultimo, il metodo basato sulla lunghez-
za dellarco di curva (si veda per la denizione del metodo [17] e per una sua applicazione in
campo elastoplastico i lavori [20, 32]), rappresenta comunque la strategia pi` u adabile. Infat-
ti il metodo di Riks rispetto ad un metodo incrementale alla Eulero `e pi` u accurato e rispetto
ad una strategia NewtonRaphson non `e aetto da problemi di convergenza in prossimit` a di
punti limite i quali, come `e facile intuire, sono proprio le zone pi` u interessanti della curva di
equilibrio da ricostruire. Nel seguito si proceder` a quindi discutendo prima una implemetazione
alla NewtonRaphson della soluzione iterativa dellequilibrio evidenziandone le caratteristiche
di convergenza e perci` o i limiti, successivamente verr`a descritta un strategia basata sul metodo
di Riks nella forma pi` u adatta ad una applicazione in campo elastoplastico.
1.5.5 Strategia di tipo NewtonRaphson
Lequazione implicita di equilibrio assume, nel generico passo, la seguente forma:
s(u) = p (1.37)
Una sua soluzione in termini iterativi basata sullannullamento del residuo pu`o essere ottenuta
mediante il seguente schema:
r
j
= p s(u
j
) (1.38)
u
j+1
= u
j
+
K
1
r
j
(1.39)
dove con
K si `e indicato una matrice di iterazione opportunamente denita. Lo schema converge
se, indicando con K
t
(u) =
ds(u)
du
la matrice di rigidezza tangente al legame s(u), risulta [32]:
0 < u
T
K
t
(u) u < 2u
T
K u u (1.40)
Una scelta che sicuramente soddisfa tale requisito di convergenza, si veda per i dettagli [20, 32],
`e la seguente
K := K
el
(1.41)
Lo schema appena descritto per`o non converge in prossimit` a di punti limite della curva
ovvero a collasso. Infatti in condizioni di collasso si ha che:
u
1
: u
T
1
K
t
(u) u
1
0 (1.42)
Ma tale dicolt` a `e connessa semplicemente al tipo di parametrizzazione adottata per descrivere
la curva di equilibrio. Infatti si `e implicitamente scelto di rappresentare la curva rispetto al
parametro di carico ovvero si scelto una legge del tipo u = u() mentre la curva che si vuole
rappresentare non `e analitica in . Tale dicolt` a pu`o essere quindi risolta scegliendo per la
curva di equilibrio una rappresentazione che sia sicuramente analitica.
Plasticit` aaspetti teorici e computazionali 24
1.5.6 Strategia di Riks
Lo schema iterativo di Riks [17] rappresenta la prima, e ancora pi` u eciente, implementazione
del metodo dellarco di curva. Lidea di base del metodo `e quella di introdurre, come para-
metro descrittore della curva, un ulteriore variabile rispetto alla quale esprimere sia il campo
di spostamento u e sia il moltiplicatore del carico . Anche diventa un ulteriore variabile da
determinare, oltre alle variabili cinematiche, e quindi nasce la necessit`a di denire una nuova
equazione da aggiungere a quelle di equilibrio gi`a disponibili. Tale equazione addizionale tipica-
mente `e fornita dalla condizione di ortogonalit` a, nello spazio allargato (u, ), tra la correzione
iterativa
u = u
j+1
u
j
(1.43)
=
j+1
j
(1.44)
e la valutazione attuale dellarco di curva percorso
u = u
j
u
0
(1.45)
=
j
0
(1.46)
Ovvero
u
T
M u +
= 0 (1.47)
dove la matrice M e lo scalare sono degli opportuni parametri metrici. Una lettura della
condizione di ortogonalit`a appena introdotta `e la seguente: se literazione parte da una oppor-
tuna estrapolazione (u
1
,
1
) che realizzi la distanza desiderata da (u
0
,
0
), la condizione (1.47)
rappresenta un modo approssimato, ma computazionalmente ecace, di imporre la lunghezza
dellarco di curva percorso (g. 1.9). linsieme delle equazioni da utilizzare nello schema iterativo
diventa quindi:
r
j
= p
o
+
j
p s(u
j
) (1.48)
K u p
= r
j
(1.49)
u
T
M u +
= 0 (1.50)
in cui p :=
dp()
d
.
1.5.7 Formulazione esplicita dello schema di Riks
Una implementazione ecace, dal punto di vista computazionale, dellapproccio di Riks richiede
comunque una piccola riorganizzazione dello schema (1.481.50) e una scelta opportuna dei
parametri metrici M e . A riguardo, per problemi di elastoplasticit`a [32], risulta conveniente
assumere:
Mu = p (1.51)
= 0 (1.52)
Plasticit` aaspetti teorici e computazionali 25
u
(j)
(j)
(j+1)
u u2 u1 u
(j) (j+1) (j+1)
u
(j)
u1 u2 u
u
(j)
(1)
|K r1|
|1u|
1
^
(j+1)
(2)
(1)
(2)
|1|
u1 u1
u2
Figura 1.9: Percorso di equilibrio: a)descrizione in termini di moltiplicatore di carico; b) descrizione in termini
di arco di curva percorso.
Stabilito ci`o una forma computazionalmente vantaggiosa dello schema iterativo pu` o essere scritta
nel modo seguente:
j+1
=
j
r
T
j
u
p
T
u
(1.53)
u
j+1
= u
j
+
K
1
[r
j
+ (
j+1
j
) p] (1.54)
Anche in questo caso la condizione di convergenza assume una forma simile a quella ottenuta in
precedenza per lapproccio di tipo NewtonRaphson:
0 < u
T
K
t
(u) u < 2 u
T
K u u : p
T
u = 0 (1.55)
La dierenza sostanziale `e costituita dallo spazio in cui deve essere soddisfatta tale diseguaglianza
che adesso non `e fornito da tutti gli incrementi possibili di spostamento ma solo da quelli
ortogonali a p. Ma risultando
p
T
u
c
=
Z
T
c
c
> 0 (1.56)
per ogni meccanismo di collasso u
c
non nullo, le direzioni di singolarit`a delloperatore K
t
(u) non
rientrano nello spazio ortogonale a p e quindi la convergenza globale dello schema `e assicurata.
1.5.8 Processo adattativo di analisi
Un processo incrementale eciente deve avere un comportamento adattativo, deve cio`e essere in
grado, sulla base di scelte autonome, di variare i suoi parametri interni in modo da ridurre lim-
Plasticit` aaspetti teorici e computazionali 26
pegno computazionale dellanalisi e migliorare laccuratezza fornita. In particolare, nellambito
di una analisi elastoplastica incrementale, il processo deve adattare la lunghezza del passo in
modo da ampliarlo nelle zone di maggiore linearit`a della curva di equilibrio e ridurlo nelle zone
di maggiore nonlinearit` a. Si ha cos` una migliore descrizione della curva ed un minore numero
di punti da calcolare. Tale adattamento `e realizzato automaticamente tramite due parametri:
e .
Il primo parametro del processo adattativo, , interviene nella estrapolazione iniziale del
passo
u
1
= u
0
+ u
0
(1.57)
1
=
0
+
0
(1.58)
in cui u
0
e
0
sono gli incrementi totali ottenuti nel passo precedente. Il secondo interviene
nella valutazione della matrice di iterazione
K e serve a simulare leetto della riduzione di
rigidezza, che eettivamente subisce la struttura, pur mantenendo una matrice di iterazione
costante:
K = K
el
(1.59)
Luso dello scalare non comporta oneri particolari in quanto
K
1
viene calcolata in maniera
banale come
1
K
1
el
consentendo perci`o di utilizzare la matrice K
el
decomposta una volta per
tutte. Lesperienza computazionale svolta nei lavori, gi`a pi` u volte citati, [20, 32], ha messo in
luce la convenienza delle seguenti formule:
j+1
=
j
r
j
T
u
j
(r
j
r
j+1
)
T
u
j
con i limiti 0.5 < 1 (1.60)
(r
j
= r
j
+ (
j+1
j
) p) da usare al jesimo ciclo di iterazione;
= 1 0.5
n n
2n n
(1.61)
da usare al termine del generico passo del processo incrementale. In questultima n `e il numero
di cicli iterativi eettuati nel passo appena terminato e n `e il numero di cicli per passo ritenuto
ottimale.
Capitolo 2
Metalli
2.1 Aspetti Fenomenologici
2.1.1 Relazioni sperimentali tensionideformazioni
Prova di trazione
Fin dai primi studi scientici sul comportamento dei metalli ci si rese conto che la caratteriz-
zazione delle propriet` a meccaniche a seguito di una prova a trazione, era sicuramente agevole da
un punto di vista realizzativo, ma celava degli aspetti di non immediata comprensione e neces-
sitava di una attenta interpretazione dei risultati ottenuti. Nonostante ci`o la prova a trazione
`e tuttora il metodo preferito per indagare sulle propriet`a meccaniche dei metalli e di tutti quei
materiali solidi sui quali essa pu`o facilmente essere attuata (vetro, plastiche dure, bre naturali
ed articiali, etc.).
Diagrammi tensionideformazioni
Il risultato immediato di una prova di trazione `e una relazione tra la forza assiale e la variazione
di lunghezza di una porzione del provino. Questa relazione `e tradotta usualmente in una tra
la tensione (la forza applicata F divisa per la sezione del provino), e la deformazione (la
variazione di lunghezza rapportata alla lunghezza originaria), ed essa viene plottata in un dia-
gramma tensionideformazioni. I parametri che rimangono costanti durante la prova includono
la temperatura e la velocit` a di carico (o di deformazione). Se vengono ottenuti signicativi
aumenti di lunghezza, allora `e importantre specicare se larea usata nel calcolo delle tensioni
`e larea originale A
0
(tensione nominale, o ingegneristica,
n
) o larea corrente (tensione esat-
ta, o di Cauchy,
e
)in altre parole se viene utilizzata la descrizione Lagrangiana o quella
Eulerianae se le deformazioni plottate sono denite come la variazione di lunghezza l divisa
per la lunghezza originaria l
0
(deformazione convenzionale, o ingegneristica,
n
) o il logaritmo
naturale del rapporto fra la lunghezza corrente l (= l
0
+ l) ed l
0
(deformazione naturale, o
logaritmica,
l
).
27
Metalli 28
Esempi di diagrammi di questo tipo sono reperibili in ogni testo di Scienza e Tecnologia dei
Materiali, o di Plasticit` a [5, pag. 71]. E chiaro che la tensione di Cauchy, poich`e non dipende
dalla congurazione iniziale, riette lo stato attuale nel provino meglio che la tensione nomi-
nale e, sebbene entrambe le denizioni della deformazione coinvolgano la lunghezza iniziale, dei
rispettivi incrementi,
n
=
l/l
0
,
l
=
l/l, solo il secondo risulta indipendente dalla congurazione
iniziale. In particolare, in materiali in cui `e possibile realizzare prove a compressione analoga-
mente a quelle di trazione, si `e spesso trovato che i diagrammi tensionideformazioni concidono
sensibilmente quando riferiti alle tensioni di Cauchy e alle deformazioni naturali [5].
La potenza impiegata nel dispositivo di prova `e pari a F
l =
n
A
0
l
0
n
=
e
Al
l
in modo
che
n
n
e
e
l
sono i rispettivi incrementi di lavoro per unit`a di volume originario e corrente
rispettivamente. Sebbene il calcolo delle tensioni di Cauchy richiederebbe a rigore, la misura
della sezione trasversale nel corso della prova, in pratica questo non `e necessario se il materiale
`e tale che durante la fase inelastica non avvengano rilevanti variazioni di volume, allora larea
corrente pu`o essere computata dalla relazione isovolumetrica Al A
0
l
0
.
Prova di compressione
A parte le dicolt` a tecniche per ottenere delle prove attendibili su provini soggetti a compres-
sione, dicolt`a legate a fenomeni di buckling, fronteggiati con ladozione di provini di dimensioni
opportunamente tozze, e problemi legati alla dilatazione dellarea e al conseguente attrito in
corrispondenza delle piastre di attacco del provino al dispositivo di prova, fronteggiabili queste
ultime attraverso una opportuna lubricazione delle superci a contatto per minimizzare i rel-
ativi fenomeni di attrito, si nota che, come suddetto, rispetto alle misure di tensione
e
e di
deformazione
l
, i risultati diagrammati sono virtualmente identici a quelli relativi a prove di
trazione.
A dienza dei metalli duttili, i materiali fragili si comportano molto diversamente in trazione
e compressione, la tensione massima ottenibile in compressione pu`o essere molto maggiore di
quella di trazione. Classici materiali fragili come lacciaio armonico o il vetro, si rompono im-
mediatamente dopo che il limite di proporzionalit`a viene raggiunto. Altri, tuttavia, come i
conglomerati e molte rocce, producono diagrammi tensionideformazioni che sono qualitativa-
mente simili a quelli di molti materiali duttili. Naturalmente, lampiezza delle deformazioni
`e molto dierente: nei materiali fragili la massima deformazione dicilmente raggiunge l1%.
La tensione di picco rappresenta linizio della frattura, mentre il decremento della pendenza
nella curva rappresenta la perdita di rigidezza dovuta alla microfessurazione progressiva. La
fase postpicco della curva `e altamente sensibile alle condizioni dei prova e alle dimensioni
del provino, quindi non pu`o essere riguardata come come una propriet` a del materiale. Inoltre
non `e la compressione di per s`e che produce la frattura, ma le tensioni di taglio e le tensioni
secondarie di trazione che la accompagnano. Ci` o nonostante le somiglianze superciali tra le
curve rendono possibile lapplicazione di alcuni concetti della plasticit` a a tali materiali, come si
vedr` a in dettaglio nel prossimo capitolo dedicato ai geomateriali.
Metalli 29
Limiti elastico e di proporzionalit`a, tensione di snervamento
I diagrammi tensionideformazioni sono caratterizzati da un intervallo di tensioni che si estende
da zero no ad un valore limite
0
, in cui lo stress `e proporzionale alla deformazione, in questo
tratto le deformazioni sono cos` piccole che non c`e dierenza tra le due denizioni precisate sopra;
0
`e chiamato limite di proporzionalit`a. Inoltre si nota che la stessa proporzionalit` a `e ottenuta
quando la deformazione viene fatta decrescere, il materiale in questo intervallo `e linearmente
elastico, ed essa `e descritta dalla legge monoassiale di Hooke: = E. Tale intervallo di
proporzionalit`a `e quindi essenzialmente un intervallo elastico e il limite di proporzionalit`a `e un
limite elastico.
Quando il provino `e sollecitato leggermente oltre il limite elastico e la tensione viene suc-
cessivamente riportata a zero, le deformazioni ottenute alla ne del processo sono dierenti da
zero. Il materiale ha acquisito cos` una deformazione permanente.
Gli eetti viscosi, pi` u o meno presenti in tutti i solidi, possono distorcere i risultati. Il modello
viscoelastico, per esempio, predice che in un test eseguito a velocit` a costante di deformazione
o di tensione, il diagramma tensionideformazioni risulter`a curvo, ma non saranno presenti
deformazioni permanenti dopo la rimozione del carico; un diagramma completo con carico e
scarico presenter` a peraltro un ciclo di isteresi. La curvatura dipender`a dalla velocit` a di prova e
sar` a trascurabile se essa verr` a attuata in un tempo molto maggiore, o molto minore, del tempo
caratteristico del modello.
Anche in assenza di eetti viscosi signicativi, non `e sempre facile determinare un valore
accurato per il limite di proporzionalit`a. Alcuni materiali, come il rame, presentano una curva
tensionideformazioni in cui non `e discernibile un tratto lineare. In altri, come lalluminio, la
transizione fra il tratto lineare e la zona curva del diagrama `e cos` graduale che la determi-
nazione del limite di proporzialit`a dipende dalla sensibilit`a degli apparati di misura. Per scopi
progettuali, si denisce allora convenzionalmente come tensione di snervamento, il valore del-
la tensione che produce uno specico valore, convenzionale, della deformazionwe permanente,
ottenuta tracciando per il dato punto, una retta la cui pendenza `e pari alla pendenza iniziale
del diagramma (il modulo elastico E). Valori tipici di tale deformazione sono l1%, lo 0.2%, lo
0.5%. Quando si usa tale denizione `e allora necessario specicare la deformazione, e si parler` a
per esmpio di tensione di snervamento allo 0.2%.
2.1.2 Deformazioni plastiche
Deformazione plastica, work-hardening
La deformazione denita come sopra pu` o essere identicata con la deformazione inelastica
(1.2). Nel contesto in cui gli eetti viscosi vengono trascurati essa viene usualmente chiamata
deformazione plastica
p
=
E
. (2.1)
La deformazione plastica ad un dato valore di tensione `e spesso in qualche modo dierente dalla
deformazione permanente osservata quando il provino `e scaricato da tale valore, questo perch`e la
Metalli 30
relazione tensionideformazioni allo scarico non `e sempre idealmente elastica, a causa di eetti
viscosi o di qualche altro fenomeno(come leetto Bauschinger).
Allaumentare della sollecitazione deformazioni plastiche addizionali sopravvengono. La cur-
va risultante dal caricamento iniziale nellintervallo plastico `e chiamata curva vergine. Se il
provino `e scaricato dopo una certa fase plastica e successivamente ricaricato, la porzione del
diagramma nel ricarico `e, come la fase di scarico, approssimativamente una linea retta di pen-
denza E, pi` u o meno no al valore della tensione di scarico. Dopodich`e la fase di ricarico segue
la curva vergine. Risultati simili vengono osservati dopo varie fasi di scarico e ricarico. Il pi` u
alto valore di tensione ottenuto prima dello scarico `e allora il nuovo limite di snervamento, e il
materiale pu` o essere considerato rinforzato o incrudito a causa della deformazione plastica (cold-
working). Lincremento di tensione con la deformazione plastica `e conseguentemente chiamato
work-hardening o strain-hardening.
La curva vergine dei solidi work-hardening, specialmente quelli senza una ben denita ten-
sione di snervamento, `e frequentemente approssimata tramite la formula di Ramberg-Osgood
=
E
+
R
E
m
(2.2)
dove ed m sono delle costanti adimensionali e
R
`e una tensione di riferimento. Se m `e molto
grande, allora
p
rimane piccola no a che non raggiunge
R
, ed aumenta rapidamente quando
eccede
R
, quindi
R
pu`o essere vista come una tensione di snervamento approssimata. Al
limite, come m tende allinnito, la deformazione plastica `e nulla per <
R
ed `e indeterminata
quando =
R
, mentre >
R
dovrebbe produrre una deformazione plastica innita. Questo
caso limite descrive un comportamento perfettamente plastico con tensione di snervamento pari
a
R
.
Resistenza ultima a trazione
Bisogna evidenziare che quando la deformazione `e maggiore di qualche unit` a percento, la dis-
tinzione fra i dierenti tipi di tensioni e deformazioni dovrebbe essere tenuta in conto. La
decomposizione (2.1) dovrebbe essere applicata, a rigore, alle deformazioni logaritmiche. La
natura della curva tensionideformazioni `e per valori rilevanti della deformazione, altamente
dipendente dal fatto che le tensioni plottate siano quelle nominali o quelle vere. La tensione
di Cauchy `e, in generale, una funzione crescente della deformazione ntantoch`e sopraggiunge
la rottura. Poich`e la sezione trasversale del provino decresce con la elongazione, la tensione
nominale aumenta molto lentamente, ed ad un certo punto della prova comincia a decrescere.
Poich`e, verosimilmente
n
=
e
exp(
l
), segue che [5]
d
n
= (d
e
e
d
l
)exp(
l
),
e quindi la tensione nominale (e il carico) `e massimo quando
d
e
d
l
= d
e
.
Metalli 31
Il massimo valore della tensione nominale ottenuto in un test di trazione viene chiamato
resistenza ultima a trazione, o semplicemente resistenza a trazione. Quando il provino viene
deformato oltre il valore corrispondente a tale tensione, la sua porzione pi` u debole inizia ad
allungarsie quindi ad assottigliarsipi` u velocemente del resto, e si former`a un collo(neck).
Ulteriori deformazioni avverranno a spese di un incremento di elongazione e di assottigliamento
di tale collo(strizione), e il processo richieder` a una diminuzione del carico, no alla rottura.
Snervamento discontinuo
Le curve tensionideformazioni di alcuni metalli contenenti impurit` a, come quelle del ferro dolce
e dellottone, presentano un fenomeno noto come snervamento discontinuo. Quando il limite
elastico iniziale viene raggiunto, improvvisamente un considerevole allungamento (dellordine
dell 1 2% quindi nettamente maggiore della deformazione elastica attuale) si registra essen-
zialmente ad un livello di tensioni costante, pari al limite elastico o di poco inferiore. Se il valore
della tensione `e lo stesso del limite elastico, allora esso `e chiamato limite di snervamento del
materiale. Se `e minore, allora esso `e noto come limite di snervamento inferiore e il limite elastico
come limite di snervamento superiore. La porzione del diagramma rappresentante questo valore
costante di stress `e chiamata piano di snervamento, e il rilascio di tensione che lo precede, se
avviene, salto di snervamento. Di seguito inizia la fase work-hardening.
Come noto, la tensione nel piano di snervamento non `e costante, ma mostra lievi e irregolari
uttuazioni. Queste sono dovute al fatto che la deformazione plastica in questa fase non `e
un processo omogeneo, ma si concentra in zone ristrette note come bande di L uders, che si
propagano lungo il provino come esso viene stirato, dando luogo a delle impronte superciali.
Quando un provino di materiale con un limite superiore di snervamento viene caricato nel-
lintervallo workhardening, scaricato, e ricaricato velocemente dopo lo scarico, la curva vergine
risulta arrotondata. Se, tuttavia, qualche tempodellordine delle oreviene lasciato trascor-
rere prima del ricarico, il limite di snervamento risulta aumentato dal precedente incrudimento,
ma si ripresenta come limite superiore, con un conseguente salto di tensione ed un piano di
snervamento prima della ripresa di rigidezza.
Eetto Bauschinger, anisotropia
Un provino di metallo duttile che ha subito un incremento di tensione a trazione e successiva-
mente scaricato(coldworked) `e dierente da un provino vergine. Abbiamo gi`a visto che esso
ha subito un incremento del limite di snervamento a trazione. Se, tuttavia, esso viene ora as-
sogettato ad un incremento di tensione in compressione, si trova che il limite di snervamento in
compressione `e minore di prima. Questa osservazione `e nota come eetto Bauschinger.
Leetto Bauschinger pu`o essere osservato ogniqualvolta la direzione della deformazione viene
invertita, come nella compressione che segue la trazione, o la torsione in un tubo a parete
sottile che cambia di verso. Pi` u generalmente, il termine eetto Bauschinger pu` o essere usato
per descrivere la diminuzione del limite di snervamento osservabile in un ricarico che segue
uno scarico, anche se il ricarico avviene nella stessa direzione del carico originale(Lubahn and
Metalli 32
Felgar [1961]) ed il fenomeno `e riscontrabile anche per velocit` a di deformazione che non lasciano
supporre lintervento di fenomeni viscosi [5].
Un altro risultato della deformazione plastica `e la perdita di isotropia. Successivamente
allincrudimento in una data direzione, si riscontrano delle dierenze tra i valori delle tensioni
di snervamento nella direzione di carico ed in quella normale ad essa. Queste dierenze possono
essere dellordine del 10%, ma in pratica vengono usualmente trascurate.
Eetti termici e meccanici
Il termine coldworking si riferisce alla deformazione plastica ottenuta a temperature al di sotto
della cosiddetta temperatura di ricristallizzazione del metallo, tipicamente uguale in termini di
temperatura assoluta, al 35 50% della temperatura di rammollimento (melting point). Gli
eetti del coldworking, come il workhardening, leetto Bauschinger, e lanisotropia indot-
ta, si possono largamente rimuovere attraverso un processo chiamato ricottura (annealing),
consistente nel riscaldare il metallo ad una temperatura relativamente alta (al di sopra della
temperatura di ricristallizzazione) e di mantenere la stessa per un certo lasso di tempo prima di
cominciare lentamente a rareddare. Lintervallo di tempo necessario per il processo decresce
con la temperatura di ricottura e con lammontare di lavoro a freddo subito (cold work).
Il processo di deformazione plastica che ha luogo nella fase di ricottura, `e noto come hot-
working, e non produce workhardening, anisotropia o eetto Bauschinger. Per i metalli con un
basso punto di rammollimento, come il piombo e lo stagno, la temperatura di ricristallizzazione
`e circa a 0
C, e quindi la deformazione a temperatura ambiente deve essere riguardata come
hot-working. Inversamente, metalli con punto di rammollimento molto alto, come il molibdeno o
il tungsteno, ( con temperature di ricristallizzazione da 1100 a 1200
C), possono essere lavorati
a freddo (cold-worked) a temperature in cui il metallo generalmente `e rovente.
Una importante caratteristica di alcuni metalli (incluso il ferro dolce), con importanti im-
plicazioni progettuali, `e il cambio di comportamento da duttile a fragile quando la temperatura
ricade al di sotto della cosiddetta temperatura di transizione.
Un softening spontaneo (inteso qu` come decremento spontaneo del limite di snervamento)
dei metalli incruditi, avviene, a temperature al di sotto di quella di ricristallizzazione. Questo
processo, la cui velocit` a `e considerevolmente pi` u bassa di quello di ricottura, `e chiamato re-
cupero (recovery). La velocit` a del processo diminuisce con il diminuire della temperatura, ed
`e trascurabile a temperatura ambiente per alcuni metalli come lalluminio, il rame e lacciaio.
Questi metalli possono conseguentemente essere riguardati, per scopi pratici, come incruditi
permanentemente.
Metalli 33
2.2 Plasticit`a Associata
2.2.1 Stati piani di deformazione
Consideriamo al solito la decomposizione del tensore delle deformazioni, scritta qu` in notazione
indiciale
ij
=
e
ij
+
p
ij
(2.3)
dove
ij
=
1
2
(u
i,j
+ u
j,i
) con i, j {1, 2, 3} (2.4)
Rispetto ad un riferimento cartesiano (x,y,z) con lasse delle y rivolto verso lalto, le componenti
che dipendono dallasse z sono nulle.
Indichiamo con
x
=
11
= u
1,1
ed
y
=
22
= u
2,2
, le deformazioni estensionali, e con
xy
=
12
=
1
2
(u
i,j
+ u
j,i
), la deformazione angolare,
13
=
23
=
33
= 0. Nel seguito ci
riferiremo alla = 2
12
=
i
f
che ha il chiaro signicato geometrico rappresentato in gura:
1
2
u1,2
f
u2,1
Figura 2.1: =
2
f
La (2.3) si semplica quindi
e
+
p
(2.5)
Assumeremo un legame elastico lineare isotropo tra le tensioni e le deformazioni
ij
= C
ijhk
e
kl
Metalli 34
da cui la relazione inversa
e
ij
= C
1
ijhk
hk
.
Il tensore delle tensioni sar` a caratterizzato dalle componenti nel piano xy, legate direttamente
alle deformazioni, e dalla componente lungo la direzione z, generata dal vincolo imposto sugli
spostamenti in tale direzione. Tale componente, assume per` o un carattere secondario nellanalisi,
nel senso che si pu` o esprimere in funzione delle altre due. Come specicato per le deformazioni,
indicheremo con
x
=
11
,
y
=
22
e
z
=
33
le tensioni normali e con =
xy
=
12
lunica
tensione tangenziale agente nel piano xy. La relazione costitutiva
= C
e
si scriver` a in forma esplicita come
=
E
(1 + )(1 2)
(1 ) 0
(1 ) 0
0 0
(1 2)
2
e
(2.6)
con lulteriore
z
= (
x
+
y
) (2.7)
2.2.2 Plasticit`a perfetta
Come visto nella discussione generale, la funzione di snervamento dipende principalmente dal
deviatore delle tensioni, che nel caso di deformazioni piane assume la forma
J
2
=
1
3
(
2
x
+
2
y
+
2
z
x
z
) +
2
. (2.8)
Il criterio di Mises si scrive allora in forma compatta
f() =
p
J
2
k = 0 (2.9)
dove k ha il signicato di tensione limite ottaedrale, ed assume i valori
k =
0
(2.10)
secondo che ci si riferisca alla condizione di snervamento ricavata da una prova di trazione o
di taglio, rispettivamente. Conviene a questo punto attuare una trasformazione di coordinate,
Metalli 35
vedremo che questo, oltre a semplicare la scrittura della funzione di snervamento, disaccoppier`a
le equazioni costitutive elastiche. Ci riferiremo quindi alle variabili
=
x
+
y
2
=
x
y
2
(2.11)
inversamente avremo
x
= +
y
= (2.12)
Il criterio di plasticit` a di Mises prevede che la deformazione plastica sia isovolumetrica, questo
impone che allo snervamento il valore del modulo di contrazione laterale sia pari a 0.5, ci` o
permette di scrivere
z
= 0.5(
x
+
y
) (2.13)
In sostanza la funzione di snervamento si semplica in
f() =
p
2
+
2
k = 0. (2.14)
Questa scrittura semplicata evidenzia il carattere puramente deviatorico del criterio in esame,
infatti ci si riduce ad una misura dello stato tensionale nello spazio ortogonale allasse sferico,
rappresentato dal valore della , e, in particolare, in tale piano, chiamato anche piano ottaedrale,
il dominio risulta essere circolare. Si riconosce allora che il vettore di usso plastico associato `e
k
Figura 2.2: Rappresentazione del dominio di snervamento di Mises nel piano deviatorico.
radiale in ogni punto del dominio. Questo aspetto `e recepito dagli algoritmi di ritorno impliciti,
che assumono tale direzione radiale per il correttore delle tensioni.
Le trasformate delle deformazioni, coerenti da un punto di vista energetico con le tensioni
adottate, si ricavano dalla relazione che esprime leguaglianza dei lavori
x
+
y
y
= + (2.15)
Metalli 36
che rende dopo qualche passaggio
=
x
+
y
=
x
y
. (2.16)
Naturalmente la
z
non produce lavoro mentre il lavoro tagliante `e invariato. I vettori delle
tensioni e delle deformazioni hanno componenti
=
(2.17)
Dal usso plastico associato
r =
f()
consegue
p
= 0
p
=
2
+
2
p
=
2
+
2
(2.18)
naturalmente si pu`o ritornare alle componenti cartesiane tramite le
p
x
=
p
+
p
2
p
y
=
p
p
2
p
xy
=
2
.
(2.19)
Si pu`o facilmente vericare che il vettore r ha norma unitaria e denisce semplicemente una
direzione, mentre il modulo `e determinato dal moltiplicatore .
2.2.3 Incrudimento
Per trattare agevolmente il modello con incrudimento deniamo la tensione equivalente
eq
=
p
3J
2
(2.20)
dove J
2
si pu`o esprimere sinteticamente in termini di componenti deviatoriche di sforzo
J
2
=
1
2
s
ij
s
ij
con s
ij
=
ij
1
3
kk
ij
(2.21)
Metalli 37
e la deformazione plastica equivalente
p
eq
=
r
2
3
p
ij
p
ij
. (2.22)
Consideriamo un elemento monodimensionale disposto con lasse lungo la direzione x di una
terna cartesiana: dalla denizione del deviatore J
2
si verica immediatamente che la
eq
si
riduce alla sola componente
x
e, come gi` a puntalizzato nellintroduzione, la
p
eq
assume il valore
della componente
p
x
, essendo il coeciente di contrazione laterale pari ad
1
2
. Si pu`o denire
quindi un un legame costitutivo incrementale
eq
= H
0
p
eq
(2.23)
direttamente ottenibile da una classica prova a trazione, dove H
0
assume il signicato di modulo
plastico, e misura appunto la pendenza della tangente alla curva rigido-plastica
eq
p
eq
. Il
legame suddetto `e quindi immediatamente generalizzabile ad uno stato generico di tensione e
deformazione.
Figura 2.3: Legame monodimensionale e idealizzazione equivalente. Il modulo elastoplastico E
0
= E
H
0
H
0
+ E
.
2.2.4 Incrudimento isotropo
Nel criterio di Mises lampiezza dal dominio elastico `e regolata dal parametro k. Esso assume,
nel piano deviatorico, il signicato di raggio del cerchio rappresentante il dominio. Nel caso si
voglia modellare un comportamento isotropo della supercie di snervamento durante la fase di
incrudimento, lunica variazione del dominio si tradurr`a in una variazione di tale raggio k. Nel
caso di hardening (H
0
> 0), il valore del raggio aumenta, e cos` quindi il dominio ammissibile
Metalli 38
delle tensioni risulter` a allargato, viceversa nel caso di softening (H
0
< 0), il dominio risulter` a
contratto. La funzione di snervamento accoglier`a quindi nel suo campo di denizione, anche la
dipendenza da una variabile interna a cui sar`a legata attraverso k.
f(, q) =
p
J
2
() k(q) = 0. (2.24)
Riscriviamo allora tale funzione introducendo le denizioni di tensione equivalente e di defor-
mazione plastica equivalente
k =
p
J
2
=
1
3
p
3J
2
=
eq
3
. (2.25)
Adottando un andamento lineare del legame incrudente
eq
p
eq
,
k =
1
3
(
eq0
+ H
0
p
eq
) (2.26)
La
p
eq
si congura quindi come la scelta pi` u naturale per la varabile interna e si pu`o quindi
Figura 2.4: Incrudimento isotropo nella rappresentazione equivalente.
esplicitare il legame
k = k(
p
eq
). (2.27)
Poniamo
eq0
3
= k
0
da cui
k = k
0
+
1
3
H
0
p
eq
(2.28)
Bisogna a questo punto rilevare che nel caso di softening, la contrazione del dominio deve essere
limitata. Al crescere della variabile interna infatti, per H
0
< 0, si raggiunger`a una condizione
Metalli 39
k
p
eq
k = k0 + (H'/3)
p
eq
H' < 0
Figura 2.5: Softening e contrazione del dominio delle tensioni nel caso di legge k = k(
p
eq
) lineare.
limite in cui linterno del dominio si ridurr` a ad un punto, condizione estrema (ideale), di esistenza
per un campo di tensioni ammissibili, g. 2.5.
Dalla denizione (2.21), il usso plastico assume lespressione
r
ij
=
f
ij
=
3
2
s
ij
eq
(2.29)
quindi
p
ij
=
3
2
s
ij
eq
(2.30)
da cui lincremento di deformazione plastica equivalente
p
eq
=
s
2
3
3
4
s
ij
s
ij
(
eq
)
2
3
(2.31)
Lincremento di k si scrive allora
k =
dk
d
p
eq
p
eq
=
H
0
3
p
eq
=
H
0
3
(2.32)
Incrudimento cinematico
Se siamo interessati a cogliere particolari comportamenti, ravvisabili sotto carichi ciclichi, tipo
eetto Bauschinger, il fenomeno dellincrudimento viene modellato attraverso una traslazione
rigida dellorigine del dominio elastico nello spazio delle tensioni. In gura 2.6 `e rappresentato
il concetto per il legame
eq
p
eq
. Si pu`o notare come la dimensione del dominio si mantenga
costante. La dipendenza dalle variabili interne `e infatti legata direttamente allo stato tensionale.
Metalli 40
Figura 2.6: Incrudimento isotropo nella rappresentazione equivalente.
Scriviamo allora la funzione di Mises nel seguente modo
f(, q) =
q
J
2
(, q) k = 0. (2.33)
Dove J
2
assume la forma
J
2
=
1
2
(s
ij
ij
)(s
ij
ij
) (2.34)
in termini di tensioni deviatoriche, che nel nostro caso si esplicita in
J
2
(
c
)
2
+ (
c
)
2
(2.35)
dove con
c
e
c
abbiamo indicato le componenti del vettore (back stress), da un punto di vista
geometrico esso rappresenta le coordinate del cerchio nel piano ottaedrale.
Se raccogliamo nei vettori s e le componenti di tensione
s =
(2.36)
e deniamo il vettore dierenza
= s (2.37)
la radice del deviatore assume la forma
p
J
2
= ksk (2.38)
e nel caso in questione
p
J
2
= kk. (2.39)
Metalli 41
La condizione k = costante permette di scrivere
d
p
J
2
= 0 ds = d. (2.40)
Si assume quindi che la variazione del vettore avvenga lungo la direzione della congiungente
lorigine con il punto tensione attuale (Prager)
d = kdk
kk
(2.41)
ma dalle (2.40), (2.38) segue che
kdk = kdsk = d
p
J
2
=
d
eq
3
=
H
0
3
d
p
eq
=
H
0
3
d (2.42)
che permette di scrivere la (2.41) in forma incrementale
=
H
0
3
kk
(2.43)
Incrudimento misto
Nel caso pi` u generale, adottando una legge di incrudimento lineare strain-hardening, il criterio
di plasticit` a di Mises si pu` o scrivere come
f(,
p
eq
) =
q
(
c
(
p
eq
))
2
+ (
c
(
p
eq
))
2
(k
0
+ k(
p
eq
)) (2.44)
Lalgoritmo di ritorno (1.5.3(pag.18)) richiede, per la soluzione del problema elastoplastico, la
denizione del sistema (1.27), qu` riscritto per completezza
=
e
+
p
(2.45)
= C
e
(2.46)
p
=
r(, q) (2.47)
q =
h(, q) (2.48)
Il set di variabili interne viene scelto, per chiarezza di esposizione, in modo da suddividere il
contributo isotropo da quello cinematico.
q =
k
(2.49)
Lincremento
p
eq
viene poi pesato attraverso un parametro (0, 1), tale da ripristinare la
coerenza con il legame
eq
p
eq
. Dalle (2.32, 2.43), si ottiene dunque lespressione per la (2.48)
q =
H
0
3
(1 )
(2.50)
Metalli 42
Dal legame elastico (2.6) segue che
x
=
(1 + )
E
[(1 )
x
y
]
y
=
(1 + )
E
[(1 )
y
x
]
sommando e sottraendo si ottengono rispettivamente le espressioni
x
+
y
=
(1 + )(1 2)
E
(
x
+
y
) (2.51)
y
=
(1 + )
E
(
x
y
) (2.52)
da cui immediatamente
=
2(1 + )(1 2)
E
(2.53)
=
2(1 + )
E
(2.54)
Il legame elastico tra le (2.55)come annunciato risulter` a disaccopiato ed assumer` a la forma
=
E
2(1 + )
1
(1 2)
0 0
0 1 0
0 0 1
e
(2.55)
Rispetto a tali variabili le altre grandezze in gioco sono
il vettore normale alla supercie , che in questo caso coincide con la direzione di usso r
r =
1
kk
0
c
c
(2.56)
da cui il prodotto interno
T
Cr =
E
2(1 + )
[(
c
)
2
+ (
c
)
2
]
(kk)
2
=
E
2(1 + )
(2.57)
I vettori
=
1
c
kk
c
kk
h =
H
0
3
(1 )
c
kk
(1 )
c
kk
(2.58)
Metalli 43
da cui il prodotto scalare
h =
H
0
3
(2.59)
Inne lespressione (1.36) assume la forma
=
p
[(
c
)
(i)
]
2
+ [(
c
)
(i)
]
2
[k
0
+ k
(i)
]
E
2(1 + )
+
H
0
3
. (2.60)
Capitolo 3
Geomateriali
3.1 Aspetti Fenomenologici
Il termine geomateriali si riferisce correntemente ai terreni, come alle rocce o ai conglomerati
cementizi(calcestruzzo). Ci` o che questi materiali hanno in comune, contrariamente ai metalli,
`e la grande sensibilit` a del loro comportamento meccanico alla pressione(sferica), che si riette
nella grande dierenza fra la resistenza a trazione e quella a compressione. Dietro questi tratti
comuni, tuttavia, le dierenze tra i terreni da una parte, e le rocce e i conglomerati dallaltra,
sono di per s`e notevoli. I terreni possono subire consistenti deformazioni a taglio e cos` possono
essere ritenuti plastici nel senso usuale, specialmente le argille che si possono facilmente modellare
senza sbriciolarsi. Rocce e conglomerati, daltra parte sono fragili, eccetto che sotto notevoli
compressioni triassiali. Comunque, a dierenza dei classici materiali fragili, in cui la frattura
avviene in prossimit` a del limite elastico, questi ultimi possono subire deformazioni inelastiche
signicativamente maggiori di quelle elastiche, e le loro curve tensionideformazioni somigliano
molto a quelle dei materiali plastici. Le deformazioni permanenti, in questi materiali, sono
dovute a svariati meccanismi, il pi` u importante dei quali `e lapertura e la chiusura delle lesioni.
3.1.1 Plasticit`a dei terreni
La natura del terreno
Le propriet` a essenziali dei terreni derivano dal fatto che essi sono dei particolati, cio`e sono
composti da molte particelle solide, di grandezza variabile da meno di 0.001 mm (argille), a
pochi millimetri (sabbie grossolane e ghiaie). Deformazioni di taglio permanenti avvengono
quando le particelle scivolano una sullaltra.
I vuoti fra le particelle sono riempiti con aria ed acqua, il rapporto tra il volume dei vuoti
V
v
e il volume della parte solida V
s
`e noto come indice dei vuoti
e =
V
v
V
s
.
44
Geomateriali 45
Mentre molta dellacqua contenuta nei vuoti pu`o presentarsi nella usuale forma liquida (acqua
libera), e potr` a evaporare, una parte di essa `e intimamente attaccata alla supercie delle par-
ticelle (acqua di adsorbimento), e non evapora a meno che il solido non `e riscaldato ad una
temperatura prossima al punto di ebollizione dellacqua. Un solido `e detto saturo se tutti i
vuoti sono riempiti dacqua, parzialmente saturo, se essi sono solo in parte riempiti dacqua e il
resto da aria. Se non vi `e acqua libera il solido `e detto secco.
Le argille sono dei terreni a grana molto ne, le cui particelle contengono una signicante
percentuale di minerali noti appunto come minerali argillosi. Il comportamento chimico di tali
minerali permette la formazione di un lm di acqua di adsorbimento che `e molto pi` u spesso
della dimensione dei grani. Il lm permette allora ai grani di muoversi mutuamente, senza che
si disintegri la matrice, quando il solido `e sollecitato. E questa la propriet` a a cui ci si riferisce
come plastica. I materiali argillosi inoltre sono notoriamente noti come terreni coesivi.
In terreni privi di coesione come le ghiaie, le sabbie, i limi, i movimenti dei grani sono
impediti dallattrito e dal mutuo contrasto, con linsorgere di tensioni di taglio che dipendono
fortemente dalla compressione. Materiali di questo tipo sono noti come terreni sabbiosi.
Compressibilit` a dei terreni
Se il terreno `e sottoposto ad una prova di compressione tra due piani, a deformazione laterale
impedita, almeno uno dei quali permeabile allacqua, si ottiene un decremento irreversibile
dellindice dei vuoti, come risultato dellespulsione di acqua. Questo processo `e noto come
consolidazione. Una tipica curva di compressione `e mostrata in gura. Si mostra la curva
(MPa)
e
0.6
0.8
1.0
1.2
p
Curva vergine
Ricompressione
Decompressione
0.25 0.0 0.50
=
e - e0
1 + e0
0.25
0.50
0.1 0.2
(MPa)
Figura 3.1: Curva di compressione per i terreni: a) diagramma di consolidazione; b) diagramma di compressione
nel piano .
Geomateriali 46
vergine ed il ciclo di isteresi conseguente alla decompressione seguita dalla ricompressione. Un
terreno che subisce una decompressione `e detto sovraconsolidato. Riplottando la curva in un
piano tensioni deformazioni, fatta eccezione per la convessit`a della curva vergine verso lalto, il
diagramma somiglia a quello dei metalli work-hardening, g. 3.1.1 b).
Comportamento a taglio
Come nei metalli duttili, la crisi di resistenza nei terreni avviene principalmente per taglio. A
dierenza dei metalli, la resistenza a taglio dei terreni `e, in molte circostanze, fortemente inuen-
zata dalle tensioni di compressione normali al piano di taglio, e quindi dalla pressione idrostatica.
Poich`e i terreni hanno piccola o nessuna resistenza a trazione, le prove sperimentali sui campioni
avvengono nei dispositivi di taglio diretto, di taglio semplice o nel pi` u noto apparecchio per le
prove triassiali.
La dipendenza della resistenza a taglio dei terreni dalle tensioni normali agenti sul piano di
taglio varia con il tipo e le condizioni del terreno. Nei terreni incoerenti, in cui la resistenza `e
dovuta essenzialmente allattrito, il comportamento `e governato dalla legge di Coulomb
= tan , (3.1)
In terreni saturi incoerenti, le tensioni applicate sono la somma delle tensioni eettive nei
grani, e delle pressioni neutre dovute allacqua (Terzaghi). La legge di Coulomb si scrive allora
= (
w
) tan. (3.2)
I terreni incoerenti inoltre, presentano considerevoli variazioni di volume quando si deformano
a taglio. Essi tendono a rigonare quando sono densi, poich`e i grani devono montare uno
sullaltro nel corso della deformazione, e a contrarsi se sono pi` u sciolti, poich`e i grani tendono
ad occupare i larghi vuoti iniziali. Un terreno granulare ha una densit`a critica quando il volume
rimane essenzialmente costante al procedere della deformazione, e i termini denso o sciolto,
assumono un signicato preciso se riferiti a tale densit`a.
Nelle argille la resistenza a taglio si pu`o approssimativamente denire come
= c + tan. (3.3)
La risposta a taglio di una argilla satura dipende dalle condizioni drenate o non drenate. La
prima condizione `e ottenuta per una lenta applicazione del carico, in modo che le tensioni
neutre non cambiano ed assumono poca importanza nella determinazione della resistenza a
taglio. In questo caso lequazione (3.1) si utilizza con buona approssimazione. In condizioni non
drenate, daltra parte, il carico `e applicato rapidamente, e le tensioni indotte vengono sopportate
dallacqua. In queste condizioni la resistenza a taglio `e indipendente dalle tensioni normali e
si utilizza la (3.3) ponendo = 0 e c c
u
per denotare la resistenza non drenata. Variazioni
di volume in questo caso sono trascurabili. Il comportamento a taglio delle argille non drenate
somiglia a quello dei metalli.
Geomateriali 47
3.1.2 Plasticit`a di rocce e conglomerati
Strainsoftening
Dopo lattingimento della resistenza ultima, i conglomerati e molte rocce esibiscono una grad-
uale decrescita nella resistenza con ulteriori deformazioni. La natura di tale decrescita, tut-
tavia, dipende da fattori associati con le apparecchiature di prova. Peraltro in questa fase lo
stato deformativo `e tuttaltro che omogeneo, quindi ci sono seri dubbi che i diagrammi otteni-
bili attraverso delle provea deformazione controllatapossano essere convertiti in una curva
tensionideformazioni che rietta le propriet`a dei materiali. Alcuni ricercatori [ReadHegemier,
1984; KotsovosCheong, 1984], attraverso lesecuzione di prove sperimentali hanno osservato
che ntantoch`e provini di terreno, rocce o calcestruzzo, subiscono deformazioni omogenee, lo
strainsoftening non si presenta.
Leetto di connamento
Un importante aspetto del comportamento triassiale del conglomerato e delle rocce `e che, se la
pressione di connamento `e abbastanza elevata, allora si previene la propagazione della frattura,
in modo che il comportamento fragile scompare. Il materiale si comporta allora in maniera
duttile con work-hardening. La curva sar`a del tipo rappresentato in gura 3.1.1 b); in generale
si pu`o osservare che il comportamento `e duttile se le tre tensioni principali sono di compressione
e vicine lun laltre.
Dilatanza
Se in un provino di roccia o calcestruzzo, soggetto a compressione monoassiale, oltre alla de-
formazione assiale
1
si misura anche la deformazione trasversale
2
=
3
, si pu`o ottenere la
deformazione volumetrica
v
=
1
+
2
+
3
. Se si diagramma la curva di equilibrio nel piano
(
1
,
v
) si trova che
v
subisce una inversione di segno dopo una prima fase di compressione,
in corrispondenza di un livello tensionale poco al sopra della met`a della tensione ultima. La
v
si annulla vicino la tensione ultima e comincia a denunciare un aumento di volume nella
fase strain-softening. Simili risultati vengono osservati per test sotto pressioni di connamento
moderatamente basse. Questo aumento di volume, conseguente alla formazione e alla crescita
dello stato fessurativo nel calcestruzzo, `e noto come dilatanza. Questo termine `e comunque ap-
plicato anche al rigonamento dei terreni granulari densi, anche se il meccanismo, dovuto alla
sovrapposizione delle particelle, `e in qualche modo dierente.
Comportamento a trazione
Test di trazione monoassiale sono dicili da realizzare su rocce e calcestruzzi, e comunque i
risultati ottenuti presentano scarti considerevoli. Le prove pi` u attendibili sono quelle in cui
le estremit`a del provino vengono cementate con resine epossidiche a piatti di acciaio aventi la
stessa sezione trasversale del provino, con le forze di trazione applicate attraverso dei cavi allo
scopo di minimizzare gli eetti essionali. La resistenza a trazione monoassiale di tali materiali
Geomateriali 48
`e tipicamente compresa tra il 6 e il 12% della corrispondente a compressione. Strainsoftening,
associato con lapertura di fessure trasversali alla direzione delle tensioni, `e osservato in test
realizzati a deformazione controllata.
3.2 Plasticit`a non Associata
Le ipotesi che vengono assunte nella plasticit` a dei metalli sono semplici e supportate da un
largo ammontare di evidenze sperimentali. Inoltre queste ipostesi forniscono una solida base
per una teoria matematica elegante in cui trovano posto un certo numero di teoremi di notevole
importanza applicativa. Dobbiamo pensare ai teoremi di unicit`a della soluzione e dei teoremi
dellanalisi limite, in grado di fornire un limite superiore ed uno inferiore alla resistenza di una
struttura caricata monotonicamente.
Sfortunatamente, le ipotesi fondamentali della plasticit`a classica, e il successo nelle appli-
cazioni progettuali rivolte alle strutture metalliche, non sono pi` u valide nel caso di altri materiali
di interesse ingegneristico come i geomateriali. Per essi gli esperimenti hanno invalidato il prin-
cipio di normalit`a. Una implicazione di questo `e che metodi di calcolo derivanti dal teorema
cinematico (del limite superiore), tipo quello del cerchio di slittamento(slip circle) per i pendii,
oppure il metodo delle linee di snervamento(yield lines) per le piastre, non possono caratteriz-
zare con coerenza un limite superiore del carico. Una conseguenza pi` u preoccupante deriva dalla
idoneit`a di alcuni modelli costitutivi da utilizzare in ambito FEM.
3.2.1 Il signicato della dilatanza
Il fenomeno della dilatanza per taglioin breve dilatanzafu discusso per primo da Reynolds
nel 1885. La dilatanza pu` o essere descritta come la variazione di volume associata con la de-
formazione a taglio di un elemento materiale. La scala di osservazione deve essere considerata
quella macroscopica, perch`e le dimensioni dellelemento devono essere abbastanza grandi da
contenere molte particelle come microelementi. Consideriamo per esempio un pacchetto di sfere
incompressibili disposte in maniera pi` u densa possibile. Se viene applicata una qualche dis-
torsione, la posizione relativa delle sfere deve cambiare, ed il volume totale del pacchetto deve
aumentare. Similmente, se il pacchetto `e originariamente organizzato in uno stato molto sciolto,
una deformazione tagliante ne causer`a una riduzione di volume. Ci si riferisce a tali variazioni
di volume con il termine dilatanza. Come gi` a discusso, questo `e un fenomeno osservato in tutti
i materiali granulari, inclusi i materiali cementati come i conglomerati e le rocce.
Un parametro utile per caratterizzare un materiale dilatante `e langolo di dilatanza . Questo
angolo fu introdotto da Bent Hansen(1958) e rappresenta il rapporto della variazione plastica di
volume sulla deformazione plastica a taglio. In realt`a questa denizione `e esatta solo nel caso
di taglio semplice, come verr` a mostrato in seguito. Dalla osservazione sperimentale, a partire
dalla resistenza di picco, in prossimit`a di essa, langolo di dilatanza presenta un valore costante
al crescere della compressione. Per i terreni, ma anche per i calcestruzzi e le rocce, tale valore `e
signicativamente pi` u piccolo dellangolo dattrito.
Geomateriali 49
Limportanza pratica dellangolo di dilatanza `e stata oggetto di varie sperimentazioni nu-
meriche, [15, 23]. E stato rilevato che in alcuni casi, come per una piastra di carico circolare su
terreno di fondazione, si nota soltanto un qualche eetto irrigidente allaumentare dellangolo di
dilatanza, ma nessun eetto rilevante sul valore della resistenza. Ci si `e resi anche conto per`o,
che in tali simulazioni numeriche la supercie di contatto piastra terreno veniva considerata
priva di attrito, e che in genere allaumentare del grado di vincolo cinematico presente nello
schema strutturale, leetto della dilatanza incominciava sensibilmente a caratterizzare anche il
comportamento allo stato ultimo. In particolare un angolo di dilatanza maggiore si traduceva
in una maggiore resistenza.
In eetti al crescere dellangolo di dilatanza, un elemento materiale soggetto a deformazione
tagliante, presenta una maggiore attitudine ad aumentare di volume. Se tale eetto non viene
contrastato dai vincoli, ci`o che si rileva `e semplicemente una maggiore rigidezza. Ma se i vincoli
sono tali da opporsi alle variazioni di volume, aumentando il mutuo contrasto fra le particelle
materiali, il relativo usso diventa sempre pi` u dicoltoso.
Pensiamo per esempio ad una barra dacciaio soggetta a slamento da un elemento di calces-
truzzo, o da un analogo dispositivo di ancoraggio nel terreno. Leetto dilatanza, quando viene
attivato, esercita una morsa sulla barra che in qualche modo, almeno no allo sbriciolamento
dei grani, esercita maggiore azione di trattenimento rispetto al caso in cui tale attitudine non
fosse presente. E tale eetto `e rilevabile anche su strutture ad eettivo comportamento tridi-
mensionale, come si vede dai risultati di indagini numeriche rivolte allanalisi limite su schemi
strutturali a volta, riportate anche in [23].
Ma questi eetti beneci sono sovrastimati, e conseguono dalle ipotesi fatte nel modello sulla
legge di usso. In realt`a la dilatanza `e minore di quella che si assumerebbe per il usso plastico
associato, e quando essa inuisce sulla resistenza ne deriva una condizione svantaggiosa. Daltra
parte le condizioni di esercizio, cio`e le deformazioni, vengono sottostimate in plasticit`a associata.
3.2.2 Prove di compressione triassiali e principali parametri
Le prove di compressione monoassiale sono probabilmente le pi` u usate per il calcestruzzo. Una
semplice estensione di questo tipo di prove `e la prova di compressione triassiale, largamente usata
per i terreni. Idealmente, una prova triassiale dovrebbe permettere il controllo indipendente
delle tre tensioni principali, in modo da poter esaminare un generale stato di tensione. Tale
prova, come `e noto, richiede un apparato piuttosto sosticato, che ne preclude lutilizzo se non
per scopi di ricerca. Quindi i test si eettuano su provini cilindrici negli usuali apparecchi
triassiali. I provini sono sigillati in una membrana impermeabile e vengono chiusi in una cella
in cui il provino pu`o essere soggetto ad una pressione da parte di un uido. Successivamente,
la tensione assiale viene incrementata, in modo che diventa la maggiore tensione principale di
compressione. Le altre tensioni rimangono pari alla pressione di cella. Cos` un test monoassiale
pu`o essere concepito come una prova triassiale senza pressione di cella. Sotto un regime di
compressioni, i risultati di un test triassiale su un terreno, una roccia o un conglomerato, sono
essenzialmente simili. Essi presentano tipicamente tre fasi distinte. Una prima fase quasi lineare,
una seconda con pendenza monotonicamente decrescente ed una terza, dopo un picco tensionale,
Geomateriali 50
1
|13|
I
II
III
I
III
II
|13|
v
v
1
I
II
III
Figura 3.2: Tipici risultati di una prova triassiale per materiali granulari sciolti o cementati. a) diagramma
1; b) diagramma v; c) diagramma v 1.
caratterizzata da pendenza negativa della curva. In termini di teoria della plasticit`a parleremmo
di comportamento elastico, fase hardening e fase softening rispettivamente. Per rocce fessurate
la curva tensioni deformazioni pu` o presentare inizialmente una concavit` a verso lalto dovuta alla
chiusura delle fessure allinizio della fase di carico [23].
I: La fase elastica
Allinizio della fase di carico, il comportamento del provino pu`o essere approssimativamente
considerato elastico, poich`e la deformazione viene recuperata allo scarico. Qu`, un ciclo di
caricoscarico produce una cos` bassa isteresi che i processi dissipativi possono essere considerati
trascurabili. Quindi c`e una piccola o nulla microfessurazione nel calcestruzzo e dicilmente
ci pu`o essere un riarrangiamento nelle posizioni delle particele in un provino di terreno. Di
conseguenza la legge di Hooke pu` o essere applicata. Se si assume isotropia, due costanti sono
sucienti alla descrizione del comportamento del materiale, precisamente il modulo di Young E
ed il rapporto di Poisson .
Per il calcestruzzo, i valori per il modulo di Young stanno fra 20 e 40 GPa, che `e circa mille
volte il valore da assumere per le sabbie. Il modulo di Young per le rocce pu`o assumere il valore
tipico delle sabbie ovvero superare quello dei calcesrtuzzi, dipende dalla porosit` a del materiale.
Maggiore concordanza di dati esiste per il rapporto di Poisson. Per il calcestruzzo, i valori pi` u
riportati stanno nellintervallo 0.15 0.2. Per i terreni esso si colloca nel piu largo intervallo di
valori 0.0 < < 0.3.
Geomateriali 51
II: La fase hardening
Linizio del comportamento incrudente `e graduale e non chiaramente denito. In questa fase
delle prove la deformazione diventa sempre pi` u inelastica a causa della microfessurazione nel
calcestruzzo e dello scorrimento delle particelle nel terreno. Lutilizzo di un modello elastico
nonlineare porterebbe ad una descrizione inaccurata ed incosistente, poich`e tale teoria predice
una continua contrazione del provino allaumentare della compressione. Questa predizione `e
invalidata dallevidenza sperimentale, g. 3.2.2, che ad un certo punto mostra un incremento
dilatante del volume allaumentare del carico. Questo fenomeno `e generato, come ormai pi` u
volte detto, dallo scorrimento fra le particelle o fra i lembi delle microfessure, il quale a sua volta
mobilita lattrito. Nellambito di una trattazione non viscosa, consideriamo la decomposizione
u
materiale granulare cementato materiale granulare sciolto
u
Figura 3.3: Scorrimento relativo fra i lembi di una fessura o tra gruppi di particelle addensate; in entrambi i
casi si osserva un comportamento dilatante.
del tensore delle deformazioni
=
e
+
p
, (3.4)
in prossimit`a della ne del regime incrudente, la tensione assiale dicilmente aumenta, e ci`o
signica che lincremento di deformazione elastica `e circa nullo, in modo che la deformazione
`e sempre pi` u puramente plastica. Ci`o che si osserva `e una relazione lineare tra la variazione
di volume e la variazione di deformazione assiale, g.3.2.2 c); il cosiddetto tasso di dilatanza si
presenta costante. Nelle condizioni attuali(regime triassiale), questa osservazione viene espressa
Geomateriali 52
dalle equazioni
sin =
p
v
2
p
1
+
p
v
(3.5)
v
=
1
+
2
+
v
(3.6)
dove `e allora una costante, appunto langolo di dilatanza.
III: La fase softening
Le curve tensionideformazioni dei test triassiali convenzionali mostrano dei picchi; questi sono
fortemente marcati per sabbie dense e per rocce e conglomerati quando leggermente connati,
ma sono molto piatte nel caso di sabbie sciolte e per rocce e conglomerati quando soggetti ad
alte pressioni di connamento. In realt`a i picchi marcati sono causati da deformazioni di taglio
che si localizzano in sottili bande, le quali separano il provino in due corpi pi` u o meno rigidi. In
tale regime di deformazioni, macroscopicamente non pi` u uniforme, le misure delle deformazioni
non sono pi` u oggettive. La situazione `e paragonabile alla strizione che si osserva in una barra di
acciaio sottoposta a trazione, dove la lunghezza della barra inuenza la deformazione misurata.
Similmente avviene nel caso di provini di materiale granulare soggetti a compressione assiale.
Di conseguenza, la sezione nale delle curve nelle g. 3.2.2 a), 3.2.2 b), non pu`o essere utilizzata
per derivare delle costanti del materiale. I diagrammi del tipo in g. 3.2.2 c) sono invece pi` u
utili allo scopo. Nonostante che le misure di deformazione non siano misurate correttamente,
il rapporto fra i loro incrementi (3.6) non `e molto inuenzato dai fenomeni di localizzazione.
Quindi langolo di dilatanza pu`o essere accuratamente misurato a dispetto della nonuniformit`a
delle deformazioni, [23].
Apparentemente, i comuni tests triassiali non sono attendibili nel regime softening, poich`e
`e virtualmente impossibile in questo range mantenere un provino in condizioni di deformazioni
uniformi. Per tale ragione, speciali tests, con una misurazione pi` u oggettiva delle deformazioni
sono stati eseguiti su sabbie molto dense, Cf. [22]. I diagrammi tensionideformazioni che
risultano da tali tests mostrano un picco molto poco accentuato. Questo denuncia che i picchi
marcati rilevati da prove su sabbie dense in comuni celle triassiali, sono invero largamente
dovuti a fenomeni di localizzazione e ad altre deformazioni nonuniformi. Per quanto riguarda il
calcestruzzo, bench`e la situazione appare pi` u complicata a basse pressioni di cella, allaumentare
di queste ultime, il comportamento si avvicina ancora una volta a quello dei terreni. Da uno
dei risultati diagrammati in [22], si ottiene una valore dellangolo di dilatanza = 15
, tipico
di sabbie molto addensate, Cf. [23], mentre sabbie sciolte presentano valori di pochi gradi, e le
argille normalconsolidate non dilatano aatto.
Per quanto riguarda i calcestruzzi e le rocce, si osserva essenzialmente lo stesso andamento.
Dai risultati ottenuti da alcuni ricercatori [18], i valori dellangolo di dilatanza per i calcestruzzi
si aggira dai 6
ai 13
, e per le rocce dai 12
ai 20
, minori valori in corrispondenza di pi` u alte
pressioni di connamento, con tendenza ad annullarsi per crescenti pressioni di cella. In denitiva
appare che tutti i valori dellangolo di dilatanza siano compresi approssimativamente fra 0
e
20
, sia che si tratti di terreni o di rocce o di calcestruzzo. Naturalmente bisogna puntualizzare
Geomateriali 53
che un materiale non pu`o dilatare indenitamente, in eetti, dopo unintensa deformazione di
taglio langolo di dilatanza si annulla e le conseguenti deformazioni non causano pi` u ulteriori
variazioni di volume.
Parametri di resistenza
Dopo aver considerato i parametri di deformabilit`a E, , , consideriamo in questa sezione,
prima di arontare la modellazione in maniera pi` u sistematica, anche i parametri di resisten-
za. Dalle prove triassiali reperibili in letteratura, si `e visto che la resistenza di picco aumenta
allaumentare delle pressioni di cella. Da un punto di vista ingegneristico, un legame lineare
del tipo
1
= a + b
3
`e abbastanza accurato. Questo criterio, come vedremo in maniera pi` u
approfondita, si pu`o riscrivere come
|
1
3
| + (
1
+
3
) sin 2c cos 0 (3.7)
dove c rappresenta la coesione e langolo di resistenza a taglio, Cf. [6, pag.199]. Per i terreni,
si riscontrano valori di tra i 15
e i 45
, dove i valori no ai 30
sono tipici delle argille ed i
valori maggiori sono osservabili per le sabbie. Per il calcestruzzo, i valori maggiormente riportati
ricadono nellintervallo 30
35
. Per quanto riguarda la coesione, essa pu`o essere determinata
dalla resistenza a compressione monoassiale tramite la relazione, Cf. [23]
c = a
1 sin
2 cos
0.3a (3.8)
La costante a nella (3.8) `e negativa poich`e le compressioni sono trattate come negative. Dai
dati riportati in [22], Vermeer e de Borst ricavano i valori a = 0 e b = 5.3, da cui c = 0 e = 43
,
tipici valori per sabbie molto addensate.
Risulta cos` evidente che langolo dattrito `e diverso dallangolo di dilatanza, generalmente
esso `e molto pi` u grande, sia che vengano presi in considerazione i terreni, i conglomerati o le
rocce. Questa osservazione sperimentale implica che una teoria della plasticit`a non-associata
deve essere impiegata per tali materiali.
3.3 Il modello di MohrCoulomb
Inizialmente tratteremo il modello di MohrCoulomb nella versione elastoplastica perfetta.
Daltra parte, per lanalisi di stabilit`a, un modello senza incrudimento produce spesso risultati
in buon accordo con quelli ottenuti tramite lutilizzo di modelli pi` u complicati. Nonostante
le capacit`a sempre crescenti di elaborazione, un codice di calcolo automatico dovrebbe sempre
incorporare un modello senza incrudimento come prima opzione, se non altro per la semplicit`a
con cui si possono controllare i risultati. Seguendo la scelta introdotta nel capitolo precedente,
continueremo a riferirci, qu` a maggior ragione, agli stati piani di deformazione. In eetti nella
meccanica dei terreni ci si trova spesso a dover risolvere problemi che godono, per motivi di
simmetria, di questa restrizione sul campo degli spostamenti. Basta pensare al carico trasmesso
Geomateriali 54
da strutture per lo pi` u linearidighe, rilevati, muri di sostegno, fondazioni nastriformioppure
alle particolari condizioni di funzionamento delle gallerie a suciente distanza dal fronte di
scavo. In ogni caso la restrizione alle condizioni suddette non `e necessaria per il modello, infatti
nella sua formulazione ci riferiremo ad un generico stato di tensione tridimensionale, ponendoci
nello spazio delle tensioni principali. Pertanto il modello, di per se, `e indierente alle particolari
condizioni di sollecitazione o di deformazione.
3.3.1 La funzione di snervamento
Consideriamo un elemento macroscopicamente omogeneo di materiale granulare. Lelemento
sia in uno stato di equilibrio statico ed uniformemente sollecitato, g 3.4. La componente
tangenziale e la componente normale di trazione su una arbitraria supercie dellelemento sono
denite come
n
e
n
rispettivamente. Il criterio di resistenza di MohrCoulomb postula, in
analogia con la legge delle forze di attrito fra superci scabre, che
|
n
| c
n
tan (3.9)
per ogni particolare elemento superciale. Le tensioni di trazione vengono trattate qu` come
x
y
1
3 n
y x
*
*
1
3
c
Figura 3.4: Sistema di riferimento e circolo delle tensioni per un elemento materiale in uno stato di deformazioni
piane.
positive, come `e usuale nella meccanica dei solidi. Il criterio di MohrCoulomb si pu` o facilemte
esprimere in termini di componenti del tensore delle tensioni, dal momento che esso rappresenta
linviluppo conico di tutti i cerchi di Mohr in condizioni di rottura, ed analogamente denisce al
suo interno tutti gli stati di tensione ammissibili. Dalla gura si verica immediatamente che
sin c cos 0 (3.10)
Geomateriali 55
dove
`e il centro del cerchio
=
1
2
(
x
+
y
) (3.11)
e
`e il raggio del cerchio
=
r
1
4
(
x
y
)
2
+
2
(3.12)
Se esprimiamo
in termini di tensioni principali, ci riferiremo sempre alla convenzione
1
2
3
(3.13)
si ritrova immediatamente lespressione gi`a scritta (3.7). Notiamo che il coeciente angolare
della retta `e negativo per > 0
. Per = 0
il criterio di Coulomb si riduce al ben noto criterio
di Tresca per i metalli. Poniamo
f
sin c cos (3.14)
quindi il dominio elastico sar` a, al solito, denito dalla condizione
f 0. (3.15)
La supercie sar` a vericata per gli stati tensionali i cui corrispondenti cerchi di Mohr risulteranno
tangenti alle rette di Coulomb. Chiaramente cerchi che vericano lappartenenza alle rette in
pi` u di un punto non sono rappresentativi di stati ammissibili.
3.3.2 Legge di usso e potenziale plastico
La legge di usso fornisce le espressioni per le deformazioni plastiche, derivandole da una funzione
scalare che si assume funzione dello stato tensionale. Peraltro come evidenziato in plasticit` a tali
relazioni hanno necessariamente carattere incrementale
p
=
(3.16)
Il moltiplicatore
deriva dalle classiche condizioni di ottimalit`a di KuhnTucker (1.11). La
funzione g assume il signicato di potenziale plastico. Per la sua denizione nel caso di materiali
granulari, con o senza coesione, Radenkovic nel 1961 propose lespressione
g =
sin + cost (3.17)
E chiaro che essa assume la stessa forma della f con la dierenza che langolo dattrito `e
sostituito dallangolo di dilatanza. Tale funzione viene utilizzata sempre e solo tramite il suo
gradiente rispetto alle tensioni quindi la presenza della costante nel termine analogo alla coesione
Geomateriali 56
`e ininuente. Se dierenziamo la g rispetto alle tensioni otteniamo le espressioni
p
x
=
1
2
(
x
y
)
2
+ sin
p
y
=
1
2
(
x
y
)
2
+ sin
p
z
= 0
p
xy
=
(3.18)
delle deformazioni plastiche nel riferimento cartesiano.
Se calcoliamo la deformazione volumetrica
p
v
=
p
x
+
p
y
+
p
z
, otteniamo lespressione
p
v
=
sin (3.19)
Se poniamo
p
def
=
q
(
p
x
p
y
)
2
+ (
p
xy
)
2
(3.20)
`e facile controllare che
p
(3.21)
da cui
sin =
p
v
p
. (3.22)
Confrontando lespressione (3.20) con la (3.12) `e chiaro come la
p
assuma il signicato di
distorsione plastica incrementale. Lequazione (3.22) restituisce la denizione dellangolo di
dilatanza, ovvero il rapporto tra la deformazione plastica volumetrica e la distorsione plastica.
Dalla gura g() si pu`o inoltre vedere quale sia il signicato sico dellangolo . In una prova
di taglio diretto infatti, il materiale allinterfaccia tra le due met`a del box, forma una sottile
zona di rottura. A parte verso le estremit`a, si pu`o presumere che la deformazione assiale sia
nulla
x
=
e
x
+
p
x
= 0 (3.23)
per cui intepretando correttamente le quantit` a vettoriali evidenziate in gura si capisce che
d`a la direzione dello spostamento nella banda di taglio.
3.3.3 Estensione al caso tridimensionale
Allo scopo di esprimere la condizione di snervamento di Coulomb in termini di componenti
principali di tensione
1
,
2
e
3
, per un opportuno trattamento di problemi tridimensionali, si
utilizza la rappresentazione delle tensioni dovuta a Mohr. Nel diagrama di Mohr, vedi g. 3.4, le
tensioni
n
e
n
sono usate come coordinate. In un punto del terreno dove le tensioni principali
Geomateriali 57
assumono i valori
1
,
2
e
3
, gli stati di tensione (
n
,
n
) rappresentanti la componente normale e
tangenziale su ogni elemento superciale passante per il punto, appartengono allinterno dellarea
tratteggiata in gura, o sul contorno. I valori che soddisfano la condizione di snervamento sono
rappresentati dalle due rette di Coulomb. La condizione di tangenza tra tali rette ed il massimo
dei circoli di Mohr ci permette di operare una cambio di coordinate, e di rappresentare il criterio
di snervamento nello spazio delle tensioni principali. Quando il pi` u grande dei cerchi di Mohr
tocca le rette, la tensione intermedia pu` o assumere qualsiasi valore fra la minima e la massima,
quindi la rappresentazione richiede la considerazione della relativa ampiezza fra le tre tensioni
principali. Dalla g. (da inserire), si rileva che ci sono 6 possibili combinazioni relative fra le
tensioni , le quali determinano le sei linee di snervamento nel piano
2
= cost. Si pu`o vedere
inoltre che la supercie di snervamento `e una piramide esagonale retta, egualmente inclinata
rispetto ai tre assi, e con il verice nel punto
1
=
2
=
3
= c cot . Tale piramide `e pienamente
denita dallesagono A,B,C,D,E,F nel piano di coordinate (
1
,
3
). Lesagono rappresentato
in gura 3.5 a) mostra la sezione della piramide con il generico piano di equazione
Figura 3.5: a)Rappresentazione della supercie di snervamento nel piano ottaedrale e confronto fra modelli.
b)Rappresentazione della supercie multifalda di MohrCoulomb nello spazio (1,2,3).
1
+
2
+
3
= cost (3.24)
Questo `e il piano deviatorico(piano ), perpendicolare allasse sferico
1
=
2
=
3
,. Lesagono
`e irregolare poich`e la resistenza a trazione `e diversa da quella a compressione. Il criterio di
Tresca, applicabile ai metalli duttili, pu`o essere rappresentato dalla stesso criterio suesposto
ponendo = 0 e c = k. La sua rappresentazione geometrica sar` a un cilindro esagonale retto
invece di una piramide. Lasse del cilindro essendo sempre la retta
1
=
2
=
3
. In questo caso
la sezione nel piano `e un esagono regolare.
Geomateriali 58
Da prove sperimentali ottenute tramite apparecchiature triassiali, si `e visto che soprattutto
per le sabbie, la supercie di snervamento di Coulomb `e una rappresentazione oggettivamente val-
ida, e da un punto di vista ingegneristico sucientemente accurata [23]. Come si pu`o facilmente
vericare , ogni falda di tale supercie ha una equazione del tipo
f =
1
2
(
max
min
) +
1
2
(
max
+
min
) sin c cos = 0 (3.25)
a cui si pu` o associare una analogo potenziale di usso
g =
1
2
(
max
min
) +
1
2
(
max
+
min
) sin + cost (3.26)
Nellanalisi di problemi in condizioni piane di deformazioni, lo stato tensionale `e comunque
tridimensionale. In un codice di calcolo ci si riferisce alle tensioni rispetto ad una terna cartesiana
(x,y,z), ma `e sempre possibile denire lentit` a delle tre tensioni principali e la loro giacitura
rispetto al sistema di riferimento. Si pu`o stabilire un ordine del tipo
1
2
3
(3.27)
e lavorare quindi sempre nel settore in cui tale diseguaglianza `e vericata, essendo il dominio
limitato dalla condizione
1
2
(
3
1
) +
1
2
(
3
+
1
) sin c cos = 0 (3.28)
Invero, in prossimit` a degli spigoli, la direzione della correzione delle tensioni, nellambito di un
algoritmo return mapping, pu`o essere tale che il correttore nisca in un settore in cui la (3.27)
non `e pi` u vericata. Per chiarezza consideriamo la g(...) dove si sono evidenziate delle regioni
singolari, dalle quali il vettore di ritorno deve necessariamente essere fornito dalla condizione di
usso plastico per superci multifalda.
3.3.4 Superci di snervamento multifalda
Seguendo lapproccio alla Koiter, il usso pu` o essere espresso come combinazione lineare dei
ussi relativi ad ogni singola falda. Deniamo il set di indici ammissibili
J
adm
= {j {1, .., n} | f
j
(, q) = 0} (3.29)
Dove n `e il numero complessivo di falde del dominio, allora il set di indici di indici attivi J
act
, `e
incluso in J
adm
con lulteriore condizione di persistenza
J
act
=
n
j J
adm
|
f
j
(, q) = 0
o
(3.30)
Il usso plastico `e cos` deto dalla
p
=
X
jJ
act
j
g
j
(3.31)
Geomateriali 59
Ai ni della strategia di correzione plastica da adottare nellalgoritmo return mapping `e im-
portante puntualizzare che la violazione di una particolare supercie durante la fase predictor
elastica, non implica necessariamente che essa sia attiva e che contribuisca quindi alla determi-
nazione del usso (3.31). In particolare bisogna controllare se durante la correzione essa debba
essere o meno inclusa in J
act
. Per uno stato di tensione appartenente ad una regione di singo-
larit`a, la condizione di consistenza deve essere soddisfatta per tutte le funzioni di snervamento
attive
f
i
=
f
i
T
+
f
i
q
T
q = 0 con i J
act
(3.32)
lincremento del vettore dell variabili interne sar` a, coerentemente, determinato dalla combi-
nazione lineare dei moduli plastici relativi ad ogni supercie attivata nel usso
q =
X
jJact
j
h
j
(3.33)
Nel semplice caso di incrudimento isotropo, q {}, dove = (
p
). La variazione
q =
T
p
=
T
X
jJact
j
g
j
(3.34)
quindi il j
esimo
modulo plastico assume la forma
h
j
=
T
g
j
(3.35)
e la condizione (3.32) si esplicita in
f
i
=
f
i
T
+
f
i
T
X
jJact
j
g
j
= 0 con i J
act
(3.36)
In generale scriveremo la (3.32)
f
i
=
f
i
T
+
f
i
q
T
X
jJ
act
j
h
j
= 0 con i J
act
(3.37)
Riprendiamo adesso le denizioni (1.29) della sezione 1.5.3, possiamo allora scrivere la precedente
in forma sintetica
T
i
=
X
jJact
A
ij
j
con i J
act
(3.38)
dove
A
ij
=
f
i
q
T
h
j
T
i
h
j
. (3.39)
Geomateriali 60
Lincremento di tensione viene espresso dalla relazione
= C(
p
) (3.40)
ovvero
= C
X
jJact
j
r
j
(3.41)
premoltiplicando la (3.41) per
T
i
e utilizzando la (3.38) si ottiene che
T
i
C
X
jJact
j
r
j
=
X
jJact
A
ij
j
(3.42)
ovvero
T
i
C =
X
jJact
T
i
Cr
j
+ A
ij
j
. (3.43)
Che pu`o essere scritta come
i
+
X
jJact
j6=i
A
ij
+
T
i
Cr
j
A
ij
+
T
i
Cr
i
j
=
i
con i J
act
(3.44)
dove
i
=
T
i
C
A
ij
+
T
i
Cr
i
(3.45)
`e il valore del moltiplicatore plastico nel caso di una sola supercie attiva.
Lequazione (3.44) rappresenta un sistema di equazioni incrementali da risolvere rispetto ai
moltiplicatori plastici incogniti. In pratica, necessariamente, si procede per incrementi niti. Se
si utilizzasse uno schema di integrazione esplicito, tutti i vettori del usso verrebbero valutati nel
punto tensione di partenza, prima della fase predictor(o meglio nel punto di contatto se si parte
dallinterno del dominio), e la (3.45) pu`o essere valutata facilmente, meglio se per subincrementi
Cf. [21], al ne di minimizzare lerrore.
E comunque palese che uno schema implicito, sebbene pi` u laborioso poich`e richiede la valu-
tazione delle stesse quantit` a nel punto soluzione ancora incognito allinizio del passo, dia risultati
pi` u corretti. In questo ambito la prima approssimazione della (3.45) pu`o essere ottenuta, vedi
(1.36) della sezione 1.5.3, dallespressione
i
=
f
i
(
E
, q
0
)
A
ij
+
T
i
Cr
i
(3.46)
con tutte le quantit`a denite in corrispondenza del predittore elastico
E
.
Geomateriali 61
3.3.5 Lalgoritmo numerico di ritorno
Operiamo adesso una generalizzazione dello schema numerico denito nella sezione 1.5.3, riscriven-
do le equazioni nel caso di supericie di snervamento multifalda. Deniamo innanzitutto il set di
indici attivi
J
act
:= {1, .., m} {1, ..., n} (3.47)
come sottoinsieme ordinato degli indici di tutte le falde del dominio.
Le equazioni costitutive
=
e
+
p
= C
e
p
=
m
X
j=1
j
r
j
(, q)
q =
m
X
j=1
j
h
j
(, q)
(3.48)
Le condizioni di KuhnTucker
f
j
(, q) 0
j
0
f
j
j
= 0
(3.49)
Le normali ad ogni singola falda
j
(, q) =
f
j
j
(, q) =
f
j
q
(3.50)
sempre si intende con j J
act
.
Le equazioni che deniscono il predittore elastico non subiscono formalmente alcuna modica,
in quanto indipendenti dalle condizioni di usso
= d(t)
= C
p
= 0
q = 0
(3.51)
Geomateriali 62
La correzione plastica ovviamente terr`a conto delle falde attive
= 0
= C
p
p
=
m
X
j=1
j
r
j
(, q)
q =
m
X
j=1
j
h
j
(, q)
(3.52)
Le correzioni incrementali
= C
m
X
j=1
j
r
j
(, q)
q =
m
X
j=1
j
h
j
(, q)
(3.53)
In forma dierenziale
d
d
=
m
X
j=1
d
d
j
d
j
dq
d
=
m
X
j=1
dq
j
d
j
d
j
(3.54)
in cui
d
d j
= Cr
j
(, q)
dq
dj
= h
j
(, q)
(3.55)
Ogni singola falda attiva della supercie di snervamento deve essere linearizzata intorno al
predittore
f
j
f
(i)
j
+
(i)
j
(
(i)
) +
(i)
j
(q q
(i)
), (3.56)
Le (3.54) in forma discreta
(i+1)
(i)
=
m
X
j=1
j
Cr
(i)
j
q
(i+1)
q
(i)
=
m
X
j=1
h
(i)
j
(3.57)
Geomateriali 63
Conviene a questo punto organizzare i vettori nel modo seguente
La matrice dellle direzioni di usso
R = [r
1
, ..., r
m
] (3.58)
La matrice delle normali al dominio nello spazio delle ;
N = [
1
, ...,
m
] (3.59)
La matrice delle normali al dominio nello spazio delle q;
X = [
1
, ...,
m
] (3.60)
La matrice dei moduli plastici;
H = [h
1
, ..., h
m
] (3.61)
Il vettore delle funzioni di snervamento;
F = {f
1
, ..., f
m
}
T
(3.62)
Il vettore dei moltiplicatori plastici;
= {
1
, ...,
m
}
T
(3.63)
La (3.56) e le (3.57) si scrivono allora
F F
(i)
+ N
(i)
T
(
(i)
) + X
(i)
T
(q q
(i)
) (3.64)
(i+1)
(i)
= CR
(i)
q
(i+1)
q
(i)
= H
(i)
(3.65)
Sostituendo le (3.65) nella (3.64) avremo in soluzione
h
N
(i)
T
CR
(i)
X
(i)
T
H
(i)
i
= F
(i)
(3.66)
Se poniamo ora
G =
N
T
CR X
T
H
(3.67)
si ottiene il sistema di equazioni scritto in forma compatta
G
(i)
= F
(i)
(3.68)
da cui la correzione dei moltiplicatori nel generico passo
= G
(i)
1
F
(i)
(3.69)
Geomateriali 64
3.3.6 Gli indicatori di singolarit`a
Nello schema numerico di soluzione nora discusso, `e di fondamentale importanza la corretta
denizione del set di superci attive J
act
. Esso non `e noto a priori durante il corso dellanalisi
e varie strategie, di carattere pi` u o meno generale possono essere adottate. Se ripensiamo alla
soluzione olonoma, la strategia di ritorno sul dominio, come dal principio di HaarK` arm`an,
`e perfettamente inquadrabile in un problema di programmazione convessa. Lenergia comple-
mentare associata al predittore, si espande nello spazio delle tensioni no a toccare il dominio
ammissibile in un unico punto, che rappresenta la soluzione elastoplastica. E un problema di
minimo, e come tale la supercie di snervamento, eventualmente multifalda, denisce un certo
numero di vincoli attivi da soddisfare in soluzione. Il set di vincoli attivi deve essere ben denito
al ne di impostare le Lagrangiane del problema.
Lalgoritmo di soluzione adoperato in questo lavoro `e di portata pi` u generale. Si valuteranno
comunque, analogamente a quanto fatto nel caso di supercie regolare alla Mises, le propriet` a
di accuratezza della soluzione tramite la costruzione delle mappe isoerrore.
Due tipi di singolarit`a esistono nella supercie di snervamento alla MohrCoulomb: gli spigoli
e lapice. Gli spigoli sono il luogo dei punti, in questo caso rettilineo, di intersezione fra due
dierenti piani della supercie di snervamento. Lapice `e il punto di incontro delle sei falde.
Abbiamo visto che imponendo la (3.27), si pu`o lavorare sempre nel settore tale che la
supercie di snervamento `e rappresentata dalla (3.28), qui riscritta per completezza
f
1
=
1
2
(
3
1
) +
1
2
(
3
+
1
) sin c cos (3.70)
mentre il potenziale plastico `e
g
1
=
1
2
(
3
1
) +
1
2
(
3
+
1
) sin + cost (3.71)
La losoa seguita nel derivare gli indicatori di singolarit`a `e, seguendo Pankaj e B`canic, quella
di ricavare delle quantit` a che identichino se il predittore di tensione si trovi o meno in una
regione singolare, prima di procedere ad una successiva iterazione nel calcolo di . Infatti
quando una sola supercie `e attiva un vettore di ritorno singolo sar` a suciente e lo stato di
tensione corretto vericher`a ancora la condizione (3.27). Tuttavia, se il predittore si trova in
una regione singolare, la tensione corretta potrebbe violare la (3.27) e risultare di fatto esterna
al dominio.
Singolarit`a di spigolo
Per un ritorno a vettore singolo, nella i
esima
iterazione, avremo che
(i)
1
=
f
(i)
1
A
(i)
11
+
(i)
1
T
Cr
(i)
1
(3.72)
dove
1
=
1
2
{sin 1 0 sin + 1}
T
(3.73)
Geomateriali 65
La direzione di usso
r
1
=
1
2
{sin 1 0 sin + 1}
T
(3.74)
La matrice di legame elastico nello spazio principale `e denita come
C = B
(1 )
(1 )
(1 )
(3.75)
dove si `e posto
B =
E
(1 + )(1 2)
(3.76)
Deniamo il vettore
def
= Cr, come `e facile comprendere tale vettore `e pari al correttore delle
tensioni per un usso plastico unitario.
1
=
B
2
{sin + 2 1 2 sin sin 2 + 1}
T
(3.77)
Sviluppando il prodotto interno
(i)
1
T
Cr
(i)
1
la correzione del moltiplicatore assume la forma
(i)
1
=
f
(i)
1
B
2
(sinsin 2 + 1)
(i)
+ A
(i)
11
(3.78)
In genere il denominatore della precedente sar`a funzione di un set di variabili interne. Scriviamo
allora per esteso la soluzione al passo
(i+1)
=
(i)
C
p(i)
(3.79)
(i+1)
=
(i)
B
2
f
(i)
1
B
2
(sin sin 2 + 1)
(i)
+ A
(i)
11
sin + 2 1
2 sin
sin 2 + 1
(i)
(3.80)
Se nel passo precedente il punto tensione si trovava in una regione di singolarit` a, la soluzione
corrente, data dalla (3.79), avrebbe potuto rendere
2
>
3
, ovvero
1
>
2
, secondo se esso era
in prossimit`a dello spigolo
2
=
3
o dello spigolo
1
=
2
rispettivamente.
Deniamo allora lindicatore di singolarit`a
12
def
= (
1
2
)
(i+1)
12
= (
1
2
)
(i)
+
B
2
f
(i)
1
(1 2)(1 sin )
B
2
(sinsin 2 + 1)
(i)
+ A
(i)
11
(3.81)
e riconosciamo che
12
> 0
3
1
>
2
(3.82)
Geomateriali 66
allora lulteriore supercie
f
2
=
1
2
(
3
2
) +
1
2
(
3
+
2
) sin c cos (3.83)
con il relativo potenziale plastico
g
2
=
1
2
(
3
2
) +
1
2
(
3
+
2
) sin + cost (3.84)
devono appartenere al set di vincoli attivi, che sar`a cos` composto
J
act
:= {1, 2} (3.85)
Saranno allora deniti anche
2
=
1
2
{0 sin 1 sin + 1}
T
(3.86)
e
r
2
=
1
2
{0 sin 1 sin + 1}
T
(3.87)
Imponendo allora f
1
= f
2
si avr` a in soluzione
3
2
=
1
(3.88)
Analogamente deniamo lindicatore di singolarit`a
23
def
= (
2
3
)
(i+1)
23
= (
2
3
)
(i)
+
B
2
f
(i)
1
(1 2)(1 sin )
B
2
(sinsin 2 + 1)
(i)
+ A
(i)
11
(3.89)
e riconosciamo che
23
> 0
2
>
3
1
(3.90)
la supercie
f
3
=
1
2
(
2
1
) +
1
2
(
2
+
1
) sin c cos (3.91)
con il potenziale plastico
g
3
=
1
2
(
2
1
) +
1
2
(
2
+
1
) sin + cost (3.92)
devono appartenere al set di vincoli attivi
J
act
:= {1, 3} (3.93)
Si deniscono cos` i vettori
3
=
1
2
{sin 1 sin + 1 0}
T
(3.94)
e
r
3
=
1
2
{sin 1 sin + 1 0}
T
(3.95)
Imponendo allora f
1
= f
3
si avr` a in soluzione
3
=
2
1
(3.96)
Geomateriali 67
Singolarit`a di apice
Il criterio di MohrCoulomb rappresenta una piramide nello spazio delle tensioni principali.
Lapice della piramide, punto dincontro dei singoli piani, forma una regione di singolarit`a
addizionale.
Nella regione regolare, in cui
12
< 0 e
23
< 0, il ritorno dovr`a avvenire a vettore singolo,
lungo la direzione denita da , data dalla (3.77) per il caso f
1
. Se lo stato nale di tensione
appartiene allapice, allora sar`a denito dalla
(i+1)
= c cot
1
1
1
(3.97)
e la suddetta regione, in tale condizione limite, sar` a ridotta ad una retta passante per lapice.
Lequazione di tale retta sar` a denita dal luogo dei punti tensioneesterni al dominiotali che
E
= Z
sin + 2 1
2 sin
sin 2 + 1
+ c cot
1
1
1
(3.98)
dove Z <
+
, qualsiasi reale positivo. Ogni piano del dominio possiede una retta cos` denita.
Pankaj e Bicanic hanno mostrato come tali rette sono gli spigoli di una piramide inversa,
convergente nellapice di MohrCoulomb, che suddivide lo spazio delle tensioni predictor in
due regioni. Appunto la regione da cui si eettua il ritorno sulle falde piane o sugli spigoli,
dalla regione in cui il ritorno necessariamente deve avvenire sullapice. Le equazioni dei piani
della piramide inversa, si possono ottenere considerando la condizione di ritorno sullapice dalle
regioni di singolarit`a che necessitano di un vettore doppio. Infatti come ad ogni falda, al limite,
corrisponde una retta di ritorno sullapice, agli spigoli tra due falde, al limite, corrisponder`a un
piano di ritorno sullapice.
Consideriamo allora il caso
12
> 0 J
act
{1, 2} (3.99)
La correzione sar` a denita dallequazione
(i+1)
=
(i)
(
1
1
+
2
2
)
(i)
(3.100)
dove
2
=
B
2
{2 sin sin + 2 1 sin 2 + 1}
T
(3.101)
in maniera esplicita avremo
(i+1)
=
(i)
B
2
sin + 2 1
2 sin
sin 2 + 1
+
2
2 sin
sin + 2 1
sin 2 + 1
(i)
(3.102)
Geomateriali 68
In questa equazione la condizione
(i+1)
1
=
(i+1)
2
`e imposta a priori, lulteriore di appartenenza
allapice pone
(i+1)
1
=
(i+1)
2
=
(i+1)
3
, per cui imponendo
(i+1)
1
=
(i+1)
3
(i)
1
B
2
(
1
(sin + 2 1) +
2
(2 sin))
(i)
=
(i)
3
B
2
(
1
(sin 2 + 1) +
2
(sin 2 + 1))
(i)
(3.103)
da cui si ottiene lequazione di un piano della piramide inversa valida alla i
esima
iterazione
G
(i)
1
= G
1
(
1
,
2
,
3
, , c, )
(i)
(3.104)
Analogo discorso dovr`a valere per tutti gli spigoli del dominio. In eetti noi siamo interessati
alla denizione delle condizioni di singolarit` a che possono prodursi a partire da un predittore
elastico che verichi comunque la condizione (3.27), per cui forniremo lespressione del secondo
piano della piramide inversa che si ottiene a partire dalla
23
> 0 J
act
{1, 3} (3.105)
la correzione delle tensioni
(i+1)
=
(i)
(
1
1
+
3
3
)
(i)
(3.106)
dove
3
=
B
2
{sin + 2 1 sin 2 + 1 2 sin }
T
(3.107)
quindi
(i+1)
=
(i)
B
2
sin + 2 1
2 sin
sin 2 + 1
+
2
sin + 2 1
sin 2 + 1
2 sin
(i)
(3.108)
Seguendo le stesse motivazioni precedenti, imponendo
1
=
3
(i)
1
B
2
(
1
(sin + 2 1) +
3
(sin + 2 1))
(i)
=
(i)
3
B
2
(
1
(sin 2 1) +
3
(2 sin))
(i)
(3.109)
da cui lequazione del secondo piano della piramide inversa valida sempre alla i
esima
iterazione
G
(i)
2
= G
2
(
1
,
2
,
3
, , c, )
(i)
(3.110)
Geomateriali 69
3.3.7 Conseguenze della plasticit`a nonassociata
Vermeer e de Borst, in [23], hanno mostrato come le soluzioni mumeriche di alcuni problemi di
interesse praticoil caso di una piastra circolare di carico (vedi anche [29]), la penetrazione di
un cono circolare in un letto di sabbia, il caso di una cupola in cemento armato sottopposta
a carico concentrato in sommit`asebbene analizzate con un modello elastoplastico perfetto,
non presentino necessariamente un limite per le tensioni nella curva di equilibrio. Questo, a
prescindere da fenomeni di locking legati al comportamento degli elementi niti utilizzati, `e
una diretta conseguenza della adozione di un potenziale plastico non associato. In particolare, si
mostrer`a come, nella simulazione di una prova di taglio diretto, ladozione di un valore realistico
per langolo di dilatanza, porti ad un comportamento postpicco, caratterizzato da softening,
come dallevidenza sperimentale.
Softening e hardening in prove di taglio semplice a volume costante
Nel primo esempio numerico, mostreremo come in un apparecchio di taglio semplice, in cui il ter-
reno `e vincolato da una deformazione volumetrica nulla, si possano osservare dei comportamenti
che a prima vista, considerando il modello privo di incrudimento, sembrerebbero inaspettati.
In realt` a il comportamento `e ben interpretato se si considera la relazione
v
=
e
v
+
p
v
= 0 (3.111)
Infatti ntantoch`e il materiale `e in fase elastica il comportamento `e governato dalla legge di
Hook(generalizzata), nel momento in cui lo stresspath raggiunge il limite di snervamento, e
il provino si inoltra nel regime elastoplastico, la relazione (3.111) deve continuare a valere. Il
comportamento dilatante `e valido per il usso plastico, e questo signica che ad un angolo > 0
corrisponder`a
p
v
> 0, bilanciata da una
e
v
< 0 a cui saranno associate delle tensioni anchesse
di compressione p (
1
+
2
+
3
)/3 < 0. Tale eetto di connamento sar` a seguito da un
incremento proporzionale della tensione limite di snervamento.
Viceversa, una dilatanza negativa, < 0, comporter`a un eetto di contrazione nella de-
formazione plastica volumetrica,
p
v
< 0. Di conseguenza ci sar` a un aumento delle tensioni di
trazione, che scaricheranno lo stato di pretensione imposto, no allannullarsi della resistenza a
taglio. Tale modello dovrebbe dar ragione del comportamento di alcune sabbie estremamente
sciolte, in cui si osserva il ben noto fenomeno della liquefazione [23]. I risultati numerici riportati
sono stati ottenuticome tutti gli altritramite un codice di calcolo agli elementi niti apposi-
tamente realizzato per il presente lavoro. I risultati sono in ottimo accordo con quelli presentati
in [23] dove vengono invece ricavati dallintegrazione numerica della equazione incrementale di
equilibrio nella classica formulazione
=
C
e
C
e
g
T
C
e
h +
f
T
C
e
g
= C
ep
(3.112)
Geomateriali 70
0 0.005 0.01 0.015 0.02 0.025
0
20
40
60
80
100
(
P
a
)
= 15
= 0
= -3
c = 0 = 0.2
= 43
E = 45 kPa
1_0 = -100.0 Pa
3_0 = -25.0 Pa
_0 = 0.0 Pa
Figura 3.6: Calcolo della risposta di una sabbia in una prova isocora di taglio semplice. Si indica sulle curve
ogni passo in cui si realizza la convergenza nello schema di Riks.
riscritta per il comportamento idealizzato assunto, in cui vengono a priori eliminate le variazioni
delle componenti normali
xy
=
C
33
1
d
a
3
b
3
xy
(3.113)
dove,
a = C
g
b
T
=
C
f
T
(3.114)
e
d = G
1 +
sin sin
1 2
(3.115)
Naturalmente per il valore = 0, si ritrova il comportamento elastoplastico perfetto, con
la tipica curva a pendenza nulla in corrispondenza della perdita di resistenza.
Nonunicit`a del carico limite
Abbiamo discusso delleventualita, non sempre riscontrata, che la curva di equilibrio possa pre-
sentare un carico limite. In plasticit` a associata `e noto che tale valore non dipende da stati di
coazione iniziali, come discende dai teoremi statico e cinematico dellanalisi limite. In plastic-
it`a nonassociata, tuttavia, il carico limite pu`o essere inuenzato dalle tensioni iniziali e dalla
sequenza del carico [23]. Consideriamo allora il caso di una prova di taglio semplice in cui la
piastra superiore sia libera di spostarsi verticalmente, e mostriamo di seguito i risultati numerici
ottenuti.
Geomateriali 71
0 0.02 0.04 0.06 0.08
0
20
40
60
80
100
(
P
a
)
Non unicit del carico limite
3 = 25
3 = 400
= 43 = 15
1 = 100 Pa
Figura 3.7: Calcolo della risposta di una sabbia in una prova di taglio semplice; il carico limite dipende dalla
coazione iniziale. I simboli sulle curve sono relativi ad ogni passo dellanalisi in cui viene raggiunto lequilibrio.
In eetti, dopo la redistribuzione plastica delle tensioni si ottiene un unico valore residuo per
la resistenza limite. Lo stesso eetto si rileva sperimentalmente per provini a dierente stato
iniziale di addensamento, con il raggiungimento di una resistenza residua in corrispondenza
dellindice dei vuoti critico.
3.3.8 Il modello hardeningsoftening per i materiali granulari
Il modello discusso nore `e utile per problemi di stabilit`a. La plasticit`a perfetta `e meno soddis-
facente per cogliere landamento degli spostamenti, perch`e questo tipo di modellazione comporta
una considerevole sovrastima dellintervallo elastico. Per tale tipo di analisi `e pi` u opportuno un
modello elastoplastico incrudente. Ai ni del presente lavoro, in cui siamo interessati al com-
portamento sotto carichi monotonicamente crescenti, adotteremo per il modello MohrCoulomb
unicamente un incrudimento isotropo, avendo gi`a discusso nella sezione riservata ai metalli (Cap.
2), le dierenze tra le caratteristiche dellincrudimento isotropo da quello cinematico, almeno in
un approccio semplicato.
Angolo di resistenza a taglio mobilizzato
Consideriamo un agglomerato di particelle rigide non cementate, in equilibrio statico sotto un
carico verticale, di intensit`a
1
, e un carico orizzontale
3
. Un incremento proporzionale di
1
e
3
causer` a un incremento proporzionale delle forze interparticellari nei punti di contatto,
ma la direzione di tali forze rimarr` a invariata. Una variazione nel rapporto
1
/
3
, daltra
parte, causer`a una variazione delle direzioni di tali forze interparticellari, con un conseguente
Geomateriali 72
slittamento di un certo numero di particelle rispetto ad altre. Tale riarrangiamento consiste in
una deformazione plastica in senso macroscopico. Quindi la deformazione plastica `e legata alla
variazione del rapporto delle tensioni.
Alcuni tests condotti su sabbie quarzose, in apparecchiature triassiali [23], hanno rilevato
una dipendenza funzionale del tipo
f
3
,
p
1
= 0 per
3
= cost (3.116)
Poich`e
1
=
e
3
=
(3.117)
segue che
3
=
(3.118)
e la relazione (3.116) si pu`o esprimere equivalentemente come
f
,
p
eq
= 0 (3.119)
dove si `e introdotta la
p
eq
allo scopo di generalizzare dal comportamento uniassiale. Il legame
suddetto si pu`o allora convenientemente esprimere nella forma
f =
sin
= 0 (3.120)
ovvero
f =
1
2
(
3
1
)
1
2
(
3
1
) sin
= 0 (3.121)
dove
`e appunto una funzione di
p
eq
che prende il nome di angolo di attrito mobilizzato.
Vermeer e de Borst, in [23], presentano tali espressioni per
ricavandole da prove sperimentali
su sabbie.
sin
= 2
p
p
eq
f
p
eq
+
f
sin per
p
eq
<
f
sin
= sin per
p
eq
f
(3.122)
in modo che langolo dattrito cresce gradualmente con la deformazione no a raggiungere il
valore limite del modello elastoplastico perfetto per un valore limite della deformazione plastica
equivalente
f
. Tale modello `e recepito anche nel codice CRISP, [9].
Coesione mobilizzata
I materiali granulari, in genere, possiedono un grado di coesione, in alcuni, come i cementi o
le rocce, tale caratteristica `e particolarmente importante. In [23] viene allora introdotta una
generalizzazione della funzione di MohrCoulomb, che tiene opportunamente in conto lattrito
Geomateriali 73
e la coesione come funzioni della variabile interna
p
eq
. Allo scopo viene introdotta la coesione
mobilizzata c
e la funzione di snervamento assume la forma
f =
sin
= 0. (3.123)
Nel caso elastoplastico perfetto basta porre c
= c cos . Da alcuni test triassiali su rocce
sabbiose, Cf. [23], si `e visto che la dierenza tra la resistenza di picco e la resistenza residua
era approssimativamente uguale al valore della coesione. Inoltre si notava che tale dierenza
diminuiva con lincremento della pressione di connamento. In [23] si propone una legge per la
relazione c
p
eq
del tipo
c
= c exp
"
p
eq
2
#
(3.124)
dove
c
`e una costante analoga alla
f
della (3.122). In eetti `e razionale pensare chein un
processo continuo di caricocon laumentare della deformazione ci sia un degrado della coesione,
e che alla ne il materiale si comporti come puramente attritivo.
Angolo di dilatanza mobilizzato
La scelta del potenziale di usso ricade ancora su di una funzione multifalda, analoga alla
funzione di snervamento ma con langolo di dilatanza che prende il posto dellangolo dattrito
g =
sin
+ cost. (3.125)
Se riscriviamo la stessa nel riferimento delle tensioni principali otteniamo che
g =
1
2
(
3
1
) +
1
2
(
3
1
) sin
+ cost (3.126)
che vale nel settore
1
2
3
.
Se ammettiamo che il usso plastico venga emanato da una regione regolare del dominio,
tale quindi che la diseguaglianza valga in senso stretto(
1
<
2
<
3
), possiamo esprimere le
deformazioni plastiche come
p
=
1
2
{sin
1 0 sin
+ 1}
T
(3.127)
La deformazione plastica di volume
p
v
=
sin
(3.128)
e quella deviatorica
p
3
p
1
=
(3.129)
da cui
sin
=
p
v
p
1
+
p
3
(3.130)
Geomateriali 74
Dal momento che la
p
2
= 0 la precedente si pu` o scrivere anche
sin
=
p
v
2
p
1
+
p
v
(3.131)
valida, come gi` a visto (3.6), nel caso di prove trassiali [23].
I risultati tipici di prove trassiali mostrano che il rapporto
p
v
/
p
1
presenta un graduale
incremento no ad un valore limite in corrispondenza della resistenza di picco. Tale incremento
pu`o essere modellato adottando una legge
p
eq
. In letteratura sono state proposte spesso
delle relazioni tra il rapporto
p
v
/
p
1
e
1
/
3
, [6]. La relazione qu` adottata `e quella fornita da
Rowe nel 1971,
1
p
v
p
1
=
tan(/4 +
/2)
tan(/4 +
cv
/2)
2
(3.132)
dove
cv
`e una carrateristica del materiale indicata come angolo dattrito a volume costante.
La precedente equazione prevede infatti che per
p
v
= 0,
cv
, ed inoltre prevede una
contrazione,
p
v
< 0, per
<
cv
ed una dilatazione positiva,
p
v
> 0, per
>
cv
.
In corrispondenza di
cv
si ha un cambio di pendenza nelle curve sperimentali del tipo
p
v
p
1
,
g. 3.2.2 c).
E stato provato che la relazione (3.132) `e particolarmente accurata per le sabbie, e lo `e
ancora per i conglomerati e le rocce, per le quali si consiglia [23], di mantenere
= 0 per
<
cv
.
Utilizzado la (3.6) nella (3.132), si ricava facilmente che
sin
=
sin
sin
cv
1 sin
sin
cv
(3.133)
che `e la relazione cercata, poich`e
(
p
eq
)
(
p
eq
) (3.134)
appunto langolo di dilatanza mobilizzato. Il valore
cv
si ricava dalla (3.133) ponendo i valori
limiti =
e =
, da cui
sin
cv
=
sin sin
1 sin sin
(3.135)
Si mostra una semplice applicazione del modello. Di diagrammi si nota come venga colto
laumento della duttilit` a allaumentare della pressione di connamento.
Geomateriali 75
0 0.005 0.01 0.015 0.02 0.025 0.03
eq
p
0
0.1
0.2
0.3
0.4
0.5
0.6
sin
Figura 3.8: Hardening dellattrito.
0 0.005 0.01 0.015 0.02 0.025 0.03
eq
p
0
2
4
6
8
10
12
c
Figura 3.9: Softening della coesione.
0 0.01 0.02 0.03 0.04
1
0
20
40
60
80
100
|1 3| (Pa)
3 = 0
3 = 10
3 = 20
3 = 30
3 = 40
Figura 3.10: a)Risposta di un materiale granulare cementato. Lattrito e la dilatanza vengono mobilizzate con
il procedere della deformazione; contemporaneamente la coesione subisce un degrado. Si mostrano i risultati al
variare della pressione di connamento 3. b)Schema geometrico e caratteristiche materiali.
Geomateriali 76
3.3.9 Scelta opportuna del parametro di incrudimento
Il modello prevede quindi un incrudimento isotropo. Consideriamo il caso in cui la variabile
interna q {
p
eq
}. In termini incrementali avremo che
p
eq
=
X
p
eq
(3.136)
dove
p
eq
q =
r
2
3
. (3.137)
Nel caso regolare in cui
12
0 e
23
0, avremo che J
act
{1} quindi
p
g
1
1
2
sin
1
0
sin
+ 1
(3.138)
Dalla denizione (3.137) segue allora che
q =
r
sin
2
+ 1
3
=
h(q) (3.139)
La funzione di snervamento `e semplicemente la
f
1
=
1
2
(
3
1
) +
1
2
(
3
1
) sin
(q) c
(q) (3.140)
da cui
=
f
1
q
=
f
1
q
+
f
1
c
q
(3.141)
Viceversa, in una regione singolare, per esempio
12
> 0, la condizione di ritorno `e multifalda
J
act
{1, 2}. La deformazione plastica
p
g
1
g
2
1
1
2
sin
1
0
sin
+ 1
2
1
2
0
sin
1
sin
+ 1
(3.142)
e la variabile interna assume la forma leggermente pi` u complicata
q =
r
1
6
h
(
2
1
+
2
2
)(sin
1)
2
+ (
1
+
2
)
2
(sin
+ 1)
2
i
(3.143)
dove, a causa dellaccoppiamento tra
1
e
2
non `e semplice ricavare delle espressioni per i
rispettivi moduli di incrudimento h
1
e h
2
, ed in ogni caso la (3.68) assumerebbe una forma
nonlineare.
Ladozione di una legge di incrudimento workhardening, basata sulla potenza dissipata
D
p
(
p
, q), risulta pi` u agevole. In questo caso la variabile interna sarebbe valutata come
q =
p
(3.144)
Considerando tutte le possibilit`a, avremmo
Geomateriali 77
J
act
{1}
q
T
g
1
1
h
1
(, q) (3.145)
J
act
{1, 2}
q
T
g
1
T
g
2
T
h
1
(, q)
h
2
(, q)
(3.146)
J
act
{1, 3}
q
T
g
1
T
g
3
T
h
1
(, q)
h
3
(, q)
(3.147)
J
act
{1, 2, 3}
q
T
g
1
T
g
2
T
g
3
h
1
(, q)
h
2
(, q)
h
3
(, q)
(3.148)
Grazie al disaccoppiamento le h
i
(, q) sono indipendenti dal particolare set attivo e, come `e
facile vericare
h
1
=
1
2
[
1
(sin
1) +
3
(sin
+ 1)] (3.149)
h
2
=
1
2
[
2
(sin
1) +
3
(sin
+ 1)] (3.150)
h
3
=
1
2
[
1
(sin
1) +
2
(sin
+ 1)] (3.151)
Per`o, nel caso specico, le variabili del modello incrudente (
, c
), sono state legate alla
deformazione plastica equivalente:
sin
= 2
p
p
eq
f
p
eq
+
f
sin
c
= c exp
"
p
eq
2
#
sin
=
sin
sin
cv
1 sin
sin
cv
Di conseguenza `e opportuno adottare una legge di incrudimento strainhardening, ma evitando
le complicazioni incontrate nella (3.143).
Geomateriali 78
Una denizione alternativa della deformazione plastica equivalente `e data dalla
p
eq
=
1
2
Z
(|
p
1
| + |
p
2
| + |
p
3
|) dt (3.152)
peraltro, immaginando di utilizzare tale denizione con riferimento ad una prova di trazione su
una barretta dacciaio,
p
v
= 0
p
2
=
p
3
= 0.5
p
1
(3.153)
e si ritrova la relazione tipica in condizione monoassiale
p
eq
=
1
2
|
p
1
| + 2
1
2
|
p
1
|
= |
p
1
| (3.154)
E una scelta di semplicit` a e di coerenza, che porta alle seguenti denizioni dei moduli plastici
h
1
=
1
2
(3.155)
h
2
=
1
2
(3.156)
h
3
=
1
2
(3.157)
Abbiamo gi` a visto la denizioni per i vettori r
j
ed
j
nella sezione dedicata agli indicatori di
singolarit` a, non rimane allora che dare le espressioni per le
j
, (3.141), relative ad ogni falda.
Scriviamo innanzitutto le derivate dellangolo dattrito e della coesione rispetto alla variabile
interna
p
eq
=
f
sin
p
p
eq
f
(
p
eq
+
f
)
2
q
p
eq
f
sin
(
p
eq
+
f
)
2
v
u
u
t1 4
p
eq
f
sin
2
p
eq
+
f
2
(3.158)
c
p
eq
= 2
c
p
eq
exp
"
p
eq
2
#
(
c
)
2
(3.159)
Allora
1
=
1
2
(
1
+
3
) cos
p
eq
p
eq
(3.160)
2
=
1
2
(
2
+
3
) cos
p
eq
p
eq
(3.161)
3
=
1
2
(
1
+
2
) cos
p
eq
p
eq
(3.162)
Siamo cos` completamente in grado di denire i termini della matrice (3.67) per la soluzione del
sistema (3.68).
Geomateriali 79
3.3.10 Equazioni della piramide inversa
Nella matrice G della (3.67) ci sono dei temini del tipo
G
ij
=
T
i
Cr
j
T
i
h
j
(3.163)
che preferiamo scrivere
G
ij
=
T
i
Cr
j
+ A
ij
. (3.164)
Mostriamo di seguito lespressione di ogni singola componente
Geomateriali 80
G
11
= B
1
2
+
1
2
sin
sin
+ A
11
G
12
= B
1
2
sin
sin
1
2
sin
1
2
sin
+
1
4
sin
+
1
4
sin
+
1
4
sin
sin
+
1
4
+ A
12
G
13
= B
1
4
sin
1
2
+
1
2
sin
+
1
4
+
1
4
sin
sin
+
1
2
sin
+
1
2
sin
sin
1
4
sin
+ A
13
G
21
= B
1
2
sin
sin
1
2
1
2
sin
1
2
sin
+
1
4
sin
+
1
4
sin
+
1
4
sin
sin
+
1
4
+ A
21
G
22
= B
1
2
+
1
2
sin
sin
+ A
22
G
23
= B
1
2
sin
sin
1
4
1
4
sin
1
2
sin
+
1
2
sin
+
1
4
sin
+
1
4
sin
sin
+
1
2
+ A
23
G
31
= B
1
4
sin
1
2
+
1
2
sin
+
1
4
+
1
4
sin
sin
+
1
2
sin
+
1
2
sin
sin
1
4
sin
+ A
31
G
32
= B
1
2
sin
1
4
+
1
4
sin
+
1
2
+
1
4
sin
sin
+
1
2
sin
+
1
2
sin
sin
1
4
sin
+ A
32
G
33
= B
1
2
+
1
2
sin
sin
+ A
33
(3.165)
Geomateriali 81
Ritorniamo adesso al problema della denizione dei piani della piramide inversa per la determi-
nazione delle condizioni di apice.
Nel caso J
act
{1, 2} bisognerebbe risolvere al passo, il sistema
G
11
G
12
G
21
G
22
(i)
(i)
=
f
1
f
2
(i)
(3.166)
Ovvero
1
=
1
2|G|
[(G
22
sin
+ G
22
)
1
+ (G
12
+ G
12
sin
)
2
+
(G
12
G
22
sin
G
22
+ G
22
sin
)
3
+ 2(G
12
+ G
22
)c
2
=
1
2|G|
[(G
21
sin
+ G
21
)
1
+ (G
22
+ G
22
sin
)
2
+
(G
22
G
21
sin
G
21
+ G
22
sin
)
3
+ 2(G
22
+ G
21
)c
]
(3.167)
Sostituendo nella (3.103) si ottiene allora lequazione del piano (3.104) in forma chiusa, valida
per la i
esima
iterazione.
G
1
= (
1
3
) +
B
4|G|
(A
1
1
+ A
2
2
+ A
3
3
+ A
4
) (3.168)
dove
A
1
= sin
sin
G
21
+ sin
G
21
+ 2 sin
G
22
+ 4G
22
2G
21
+ G
21
sin
G
21
+ 2 sin
G
21
2 sin
G
21
4 sin
G
22
+ 2 sin
sin
G
21
2G
22
A
2
= 2 sin
G
22
+ 4 sin
G
12
+ sin
G
22
4G
12
2 sin
G
22
sin
G
22
2 sin
G
12
+ sin
sin
G
22
+ 2G
22
2 sin
sin
G
22
G
22
+ 2G
12
A
3
= 2 sin
G
22
+ 4G
12
+ sin
sin
G
22
+ 2 sin
G
21
+ 3 sin
G
22
2 sin
G
12
2 sin
sin
G
22
6 sin
G
22
+ 3G
22
+4 sin
G
12
G
21
+ sin
G
22
sin
sin
G
21
sin
G
21
sin
G
21
+ 2 sin
sin
G
21
+ 2G
21
6G
22
+ 2 sin
G
21
2G
12
A
4
= 4 c
sin
G
22
8 c
G
12
4 c
G
21
2c
sin
G
22
+ 12 c
G
22
+2c
G
21
4 c
sin
G
21
+ 4c
G
12
6c
G
22
+ 2c
sin
G
21
(3.169)
Naturalmente
|G| = G
11
G
22
G
12
G
21
(3.170)
Geomateriali 82
Analogo discorso per il caso J
act
{1, 3}
G
11
G
13
G
31
G
33
(i)
(i)
=
f
1
f
3
(i)
(3.171)
Che risolte pongono
1
=
1
2|G|
[(G
33
sin
+ G
13
G
13
sin
G
33
+)
1
+
(G
13
G
13
sin
)
2
+ (G
33
+ G
33
sin
)
3
+ 2(G
33
+ G
13
)c
3
=
1
2|G|
[(G
31
sin
+ G
33
G
33
sin
G
31
)
1
+
(G
33
G
33
sin
)
2
+ (G
31
+ G
31
sin
)
3
+ 2(G
31
+ G
33
)c
]
(3.172)
Sostituendo nella (3.109) si ottiene lequazione del piano (3.110) in forma chiusa, valida per la
i
esima
iterazione.
G
2
= (
1
3
) +
B
4|G|
(B
1
1
+ B
2
2
+ B
3
3
+ B
4
) (3.173)
dove, questa volta
B
1
= 2 sin
G
31
+ 2 sin
sin
G
33
2G
31
+ 4 sin
G
13
sin
G
31
+ 2 sin
G
31
+ 3 sin
G
33
2 sin
G
33
sin
G
31
2 sin
sin
G
31
+ 2G
13
+ 3G
33
3G
33
G
13
+ sin
G
33
sin
sin
G
33
+ sin
sin
G
31
6 sin
G
33
2 sin
G
13
+ G
31
B
2
= 2G
33
+ 4 sin
G
13
sin
G
33
+ G
33
2 sin
sin
G
33
sin
sin
G
33
+ 2 sin
G
33
2 sin
G
33
+ 4G
13
+ sin
G
33
2 sin
G
13
2G
13
B
3
= G
31
+ sin
sin
G
31
4 sin
G
33
2 sin
sin
G
31
+2 sin
G
31
2 sin
G
31
sin
G
31
+ 2G
31
+ 2 sin
G
33
+sin
G
31
4G
33
+ 2G
33
B
4
= 4c
G
13
2c
sin
G
31
+ 2c
G
31
+ 2c
sin
G
33
+ 12 c
G
33
4 c
G
31
6c
G
33
4 c
sin
G
33
+ 4 c
sin
G
31
8 c
G
13
(3.174)
Naturalmente, in questo caso
|G| = G
11
G
33
G
13
G
31
(3.175)
Nelle precedenti, come gi`a visto,
B =
E
(1 + )(1 2)
(3.176)
Geomateriali 83
Le funzioni che deniscono i piani della piramide inversa, devono essere usati, analogamente
alle quantit`a
12
e
23
, come degli indicatori di singolarit`a. In questo caso, se il punto tensione
appartiene allinterno della regione singolare di apice seguir`a che
G
1
> 0 e G
2
> 0 J
act
{1, 2, 3} (3.177)
nel senso che devono essere ambedue vericate positive, e il sistema di correzione per il ritorno
sar` a
G
11
G
12
G
13
G
21
G
22
G
23
G
31
G
32
G
33
(i)
(i)
=
f
1
f
2
f
3
(i)
(3.178)
che, in soluzione, vericher`a la condizione di appartenenza allapice.
3.4 Stato Critico
Nella introduzione di questo capitolo abbiamo mostrato un tipico diagramma di compressione
triassiale o edometrica per un provino di terreno. Laspetto pi` u rilevante `e che una variazione di
compressione isotropa si traduce in un aumento della deformazione plastica volumetrica. Uno
scarico, daltra parte, avviene in regime elastico. Pertanto una curva come quella mostrata in
g. 3.1.1, `e da intendersi come il diagramma di un materiale elastoplastico incrudente.
Ci sono due aspetti che un classico modello elastoplastico alla MohrCoulomb non coglie. Il
primo, legato soprattutto, ma non solo, ad una predizione eccessiva delle deformazioni plastiche
di volume, `e stato arontato e risolto con un approccio nonassociato del usso plastico.
Il secondo aspetto, di particolare rilievo per la corretta denizione del dominio delle tensioni,
`e appunto la necessit`a di limitare il dominio elastico lungo lasse delle pressioni. Il modello
di MohrCoulomb infatti prevede un comportamento elastico per qualsiasi valore della pres-
sione sferica nel verso delle compressioni, essendo limitato solo in trazione, contro levidenza
sperimentale.
Anche questo aspetto pertanto, sembrerebbe legato pi` u alla corretta valutazione dello stato
deformativo, che ad una corretta valutazione della capacit`a portante.
Nel 1963 Roscoe e Schoeld, a conclusione di un ciclo ventennale di studi e di ricerche
sperimentali eettuato presso luniversit`a di Cambridge, presentano la formulazione completa di
un modello elastoplastico per i terreni, con particolare riguardo alle argille tenere (clay), che `e
oggi noto con il nome di CamClay (dal nome del ume Cam). Vogliamo riportare di seguito,
a scopo introduttivo, la assunzioni ed i principali parametri del modello.
Geomateriali 84
3.4.1 CamClay
I parametri descrittivi
Il modello `e stato sviluppato relativamente alla descrizione del comportamento, allinterno di
una cella triassiale, di terreni rimaneggiati. I parametri sono deniti
p
0
=
0
a
+ 2
0
r
3
u
q =
0
a
0
r
=
a
r
V = 1 + e
(3.179)
Il signicato dei simboli `e noto. Vengono introdotte quattro costanti del terreno: M, , , ;
che descrivono le fondamentali propriet` a mineralogiche dello stesso. Le quantit`a cinematiche
associate alle prime due delle (3.179) sono
v =
a
+ 2
r
=
2
3
(
a
r
)
(3.180)
Tramite le (3.179) e le (3.180) viene correttamente denito il lavoro incrementale di deformazione:
L
d
= p v + q =
a
a
+ 2
r
r
=
1
1
+
2
2
+
3
3
(3.181)
Relazioni volume-pressioni
Dallosservazione sperimentale si ricava che lequazione della linea di compressione isotropa, nello
stato vergine del provino (INCL), anche detta linea di normal consolidazione isotropa, viene
ben rappresentata da una retta di equazione
V = N ln(p
0
) (3.182)
In fase di scarico si assume la relazione analoga
V = V
ln(p
0
) (3.183)
in eetti landamento rettilineo `e riprodotto fedelmente solo in prossimit`a dellinizio dello scarico.
Linea di stato critico
Roscoe, Schoeld e Wroth (1958) hanno per primi ipotizzato lesistenza di una condizione di
stato critico, raggiunta la quale il provino pu`o continuare a deformarsi senza cambio di volume
Geomateriali 85
o delle tensioni ecaci p
0
e q. Questa condizione di stato critico `e individuata da una curva
(CSL) nello spazio (p
0
,q,V ), ed `e rappresentata dalle equazioni
q = Mp
0
(3.184)
V = ln(p
0
) (3.185)
M e sono delle costanti per un determinato terreno. Essi determinano la pendenza della CSL
nel piano (p
0
, q) e la localizzazione della CSL nel piano (p
0
, V ) rispettivamente. La (3.185) in
particolare, `e una particolare retta di compressione, e si ricava che N = .
La linea di stato critico cos` denita, rappresenta lo stato nale di un provino di terreno in
un test triassiale, in tali condizioni `e possibile continuare a deformare a taglio il provino senza
variazioni di volume e di tensioni imposte:
v
= 0;
q
= 0;
p
0
= 0. (3.186)
Derivazione del CamClay
Oltre alle quantit`a descritte sopra, la completa denizione del modello si avvale delle seguenti
assunzioni
1. Il lavoro fatto durante la deformazione plastica `e pari a Mp
0
p
, che rappresenta la legge
di usso e, tramite integrazione il dominio di snervamento.
2. Le deformazioni elastiche allinterno del dominio corrispondono a movimenti lungo una
retta del tipo (3.183). Lampiezza del dominio elastico `e ssata dalla pressione isotropa di
normal consolidazione p
0
c
, la cui variazione denisce la legge di incrudimento del modello.
La prima delle suddette assunzioni, si esprime tramite la relazione
p
0
v
p
+ q
p
= Mp
0
p
(3.187)
Schoeld e Wroth, nel loro celebre lavoro [2], danno ragione della precedente con la seguente
argomentazione
Consideriamo un aggregato casuale di particelle solidi irregolari di diversa taglia che
si sfregano, si frantumano, urtano una contro laltra durante un processo continuo
di deformazione. Visto da vicino, saremmo in presenza di un processo stocastico di
movimento casuale, ma prendendo le dovute distanze osserveremmo un usso con-
tinuo. Da vicino dovremmo aspettarci di trovare molte e complicate cause di dissi-
pazione e un danneggiamento delle particelle; tuttavia, prescindendo dai dettagli pos-
siamo descrivere lintero processo dissipativo con riferimento allattrito, trascurando
le possibilit` a di degrado e di orientazione delle particelle
Geomateriali 86
Riscriviamo allora la (3.187)
v
p
p
= M
q
p
0
(3.188)
Si assume nel modello una legge di usso associata, pertanto la condizione di normalit`a = 0
si esprime ora con la
p
0
v
p
+ q
p
= 0; (3.189)
da cui
v
p
p
=
q
p
0
(3.190)
e la (3.188) si riscrive come
q
p
0
=
q
p
M (3.191)
Introducendo il rapporto =
q
p
0
si ricava, dierenziando, che
d
dp
0
=
1
(p
0
)
2
dq
dp
0
p
0
q
(3.192)
da cui
dq
dp
0
=
d
dp
0
p
0
+
q
p
0
(3.193)
Eguagliando la (3.191) alla (3.193), scritta anchessa in forma dierenziale, si ottiene la
d
dp
0
p
0
= M (3.194)
la cui integrazione fornisce
q
p
0
= M ln(p
0
) + cost (3.195)
Quando
q
p
0
= 0 p
0
p
0
c
cost = M ln(p
0
c
) (3.196)
e la (3.195) assume la forma
q = Mp
0
ln
p
0
c
p
0
(3.197)
che `e la rappresentazione nel piano (p
0
q) della supercie di snervamento. Essa assume un
massimo nel punto p
0
= e (2.718..) dove interseca la CSL ed assume il valore q = Mp
0
, condizione
di stato critico.
Geomateriali 87
3.4.2 CamClay modicato
E noto che la (3.197) presenta una cuspide sullasse delle p
0
, complicazione inutile, alla luce
del fatto che da evidenze sperimentali la deformazioni a taglio previste per bassi rapporti
sono valutate in maniera eccessiva [4], inoltre il CamClay prevede un valore del coeciente di
spinta a riposo, K
0
= 1, coerentemente con la denizione della I-NCL (3.182), quando valori
normalmente misurati nei terreni stanno nel range 0.5 0.7.
Roscoe e Burland, nello stesso periodo (1968) rispetto a Schoeld e Wroth, assumono una
diversa legge di dissipazione per il lavoro plastico, da cui deriva il modello, di pi` u largo uso, che
v` a sotto il nome di CamClay modicato. Lassunzione suddetta `e la seguente
p
0
v
p
+ q
p
= p
0
q
( v
p
)
2
+ (M
p
)
2
(3.198)
che porta alla
v
p
p
=
M
2
2
2
(3.199)
imponendo la condizione di normalit` a (3.189) e la (3.195) si ricava stavolta che
d
dp
0
p
0
=
M
2
+
2
2
(3.200)
operando una separazione di variabili si riscrive la stessa come
2
M
2
+
2
d =
1
p
0
dp
0
(3.201)
che integrata porta alla
ln
M
2
+
2
= ln(p
0
) + cost (3.202)
ponendo = 0 si ottiene
ln
M
2
= ln(p
0
c
) + cost cost = ln(p
0
c
M
2
) (3.203)
pertanto la (3.202) si semplica in
M
2
+
2
=
p
0
c
M
2
p
0
(3.204)
da cui la
q
2
+
p
0
2
M
2
= p
0
p
0
c
M
2
(3.205)
che `e la rappresentazione della supercie di snervamento del CamClay modicato nel piano
(p
0
q). Essa presenta un massimo per un valore di p
0
=
p
0
c
2
, dove, naturalmente q = Mp
0
,
condizione di stato critico.
Geomateriali 88
Lequazione (3.205) `e un ellisse, e la condizione di stato critico `e una retta di attrito, la cui
pendenza M `e legata allangolo di resistenza a taglio dalla relazione
M =
6 sin
3 sin
(3.206)
con riferimento a prove triassiali di compressione o di estensione rispettivamente.
La generalizzazione della (3.205) a stati di tensione generici, `e di norma unellissoide di
rivoluzione nello spazio delle tensioni principali. Lo stato critico, di conseguenza, viene rappre-
sentato da un cono. Tale cono coincide con la supercie di snervamento di DruckerPrager.
Il criterio di DruckerPrager, che generalizza la funzione di Mises mediante lintroduzione del-
linvariante I
1
, venne presentato come una alternativa al criterio di MohrCoulomb. In eetti
in questo contesto esso non rappresenterebbe un criterio di snervamento, bens` una condizione
di stato critico. E noto peraltro, da evidenze sperimentali, che il criterio di MohrCoulomb `e
di gran lunga pi` u aderente alla realt` a rispetto al criterio di DruckerPrager, e che lunica nota
a favore di questultimo `e la notevole semplicazione della trattazione computazionale che dis-
cende dallassenza delle singolarit`a di spigolo. Ma abbiamo gi` a visto come tali dicolt` a possano
essere arontate e risolte. In eetti la notevole dierenza tra i due criteri `e la capacit` a, nella
generalizzazione multifalda del criterio di MohrCoulomb, di poter cogliere la dipendenza dalla
tensione intermedia, condizione assolutamente preclusa ad un dominio generato per semplice riv-
oluzione intorno allasse delle pressioni sferiche quale quello di DruckerPrager, che risulterebbe
cos` indipendente dal rapporto delle tre tensioni principali riducendosi sempre ad un cerchio nel
piano deviatorico.
Con riferimento ad un articolo di Zienkiewicz (ed altri) [15], mostriamo allora la generazione
di un modello allo stato critico, coerente con i presupposti del CamClay modicato, e nello
stesso tempo con le caratteristiche del MohrCoulomb, nel senso che assume come stato critico
la supercie multifalda.
3.4.3 Il modello elastoplastico con condizione di stato critico alla Mohr
Coulomb
Generazione del modello
Per semplicit` a di scrittura confonderemo nel seguito p
0
con p, e ci riferiremo agli invarianti in
termini di tensioni principali
p =
1
3
(
1
+
2
+
3
) (3.207)
q =
1
2
q
(
1
3
)
2
+ (
1
2
)
2
+ (
2
3
)
2
(3.208)
La rappresentazione del dominio di snervamento nel piano (pq) sia allora unellisse con centro
sullasse delle p di equazione
(p p
c
)
2
a
2
+
q
2
b
2
= 1 (3.209)
Geomateriali 89
lo stato critico, in tale piano, sia rappresentato dalla retta di equazione
q = C p tan (3.210)
dove `e chiara lanalogia con le quantit`a del criterio di Coulomb. La condizione di massimo per
lellisse, allintersezione con la (3.210), e lappartenenza allapice, ssano i parametri
b
a
= tan ; a =
C
tan
p
c
(3.211)
Allora la funzione di snervamento assume laspetto
Z := (p p
c
)
2
+
q
2
tan
2
C
tan
p
c
2
= 0 (3.212)
Per imporre la piena corrispondenza tra la (3.210) e il criterio di Coulomb, consideriamo
lespressione (
1
2
3
)
f
1
:=
1
2
(
3
1
) +
1
2
(
3
+
1
) sin c cos = 0 (3.213)
conviene esprimere ora le tensioni principali nella forma [12]
=
2
3
q
sin
0
+
4
3
sin
0
sin
0
+
2
3
p
p
p
(3.214)
da cui, sfruttando qualche identit`a trigonometrica, si ricava che
1
=
2
3
q cos
0
3
+
1
= 2p
2
3
q sin
0
(3.215)
(3.213) si riscrive allora in termini degli invarianti (p, q,
0
)
f
1
:= q
3
cos
0
1
3
sin sin
0
+ p sin c cos = 0 (3.216)
Questultima si pu` o riscrivere come
q =
c cos p sin
1
3
cos
0
1
3
sin sin
0
(3.217)
Geomateriali 90
e dal confronto con la (3.210) si riconosce immediatamente che
tan =
3 sin
3 cos
0
sin
0
sin
(3.218)
daltra parte, poich`e
C =
3 c cos
3 cos
0
sin
0
sin
(3.219)
sfruttando la (3.218) si ricava che
C
tan
=
c
tan
(3.220)
Supercie di snervammento
Le relazioni (3.215), sono valide nel settore dello spazio principale dove vale la condizione
1
2
3
. Dal loro rapporto deriva lespressione dellangolo
0
, che descrive la proiezione
dello stato di tensione sul piano (piano deviatorico), esso coincide con langolo di Lode ed `e
limitato nel range
6
0
6
(3.221)
La sua espressione in termini di tensioni principaliin tale settore`e data dalla
0
= arctan
3
2
2
+
1
(
1
3
)
(3.222)
Tale espressione permette di caratterizzare, tramite la sostituzione nella (3.218), la scrittura
della (3.212), specializzandola nel settore di interesse (
1
2
3
)
Z
1
:=
1
36 sin
2
14 5 cos
2
6 sin
2
1
+
12 sin + 4 4 cos
2
2
+
8 10 cos
2
3
+ (24 p
c
+ 24 p
c
cos
2
)
1
+
8 8 cos
2
2
2
+
4 4 cos
2
12 sin
3
+
24 p
c
+ 24 p
c
cos
2
2
+
14 5 cos
2
+ 6 sin
2
3
+
24 p
c
+ 24 p
c
cos
2
3
+
72 c p
c
sincos 36 c
2
cos
2
= 0
(3.223)
Nel settore dello spazio principale in cui vale la sequenza
2
1
3
, la retta di Coulomb,
come gi` a ampiamente discusso, `e rappresentata dalla
f
2
:=
1
2
(
3
2
) +
1
2
(
3
+
2
) sin c cos = 0 (3.224)
Geomateriali 91
ma le tensioni principali subiscono una permutazione e sono espresse dalle
=
2
3
q
sin
0
sin
0
+
4
3
sin
0
+
2
3
p
p
p
(3.225)
Lespressione della (3.216) rimane immutata, nch`e non si riconosce che il discriminante consiste
nella forma del terzo invariante
0
, infatti
2
=
2
3
q cos
0
3
+
2
= 2p
2
3
q sin
0
(3.226)
e, in questo caso
0
= arctan
3
2
1
+
2
(
2
3
)
(3.227)
Sostituendo la precedente nella (3.218), e le espressioni di p e q in termini di tensioni principali
si ottiene stavolta lequazione della (3.212) valida nel settore
2
1
3
Z
2
:=
1
36 sin
2
8 8 cos
2
2
1
+
12 sin + 4 4 cos
2
2
+
4 4 cos
2
12 sin
3
+ (24 p
c
+ 24 p
c
cos
2
)
1
+
14 5 cos
2
6 sin
2
2
+
8 10 cos
2
3
+
24 p
c
+ 24 p
c
cos
2
2
+
14 5 cos
2
+ 6 sin
2
3
+
24 p
c
+ 24 p
c
cos
2
3
+
72 c p
c
sin cos 36 c
2
cos
2
= 0
(3.228)
Stesso discorso per il settore
2
3
1
, dove la retta di Coulomb `e espressa dal piano
f
3
:=
1
2
(
2
1
) +
1
2
(
2
+
1
) sin c cos = 0 (3.229)
Geomateriali 92
le tensioni principali sono espresse dalle
=
2
3
q
sin
0
sin
0
+
2
3
sin
0
+
4
3
p
p
p
(3.230)
da cui
1
=
2
3
q cos
0
2
+
1
= 2p
2
3
q sin
0
(3.231)
e inne
0
= arctan
2
2
3
+
1
(
1
2
)
(3.232)
La relativa falda della supercie di snervamento `e ora
Z
3
:=
1
36 sin
2
14 5 cos
2
6 sin
2
1
+
8 10 cos
2
2
+
12 sin + 4 4 cos
2
3
+ (24 p
c
+ 24 p
c
cos
2
)
1
+
14 5 cos
2
+ 6 sin
2
2
+
4 4 cos
2
12 sin
3
+
24 p
c
+ 24 p
c
cos
2
2
+
8 8 cos
2
2
3
+
24 p
c
+ 24 p
c
cos
2
3
+
72 c p
c
sin cos 36 c
2
cos
2
= 0
(3.233)
Dalla gura ?? `e chiaro che la supercie di snervamento cos` realizzata, `e un dominio multifalda
formato da superci quadratiche lungo la direzione di p, ma che mantengono il carattere lineare
nel piano deviatorico. In particolare le sezioni del dominio con il piano assumono la forma
dellesagono irregolare di MohrCoulomb, per un opportuno fattore di scala , > oppure < di 1
secondo che si consideri una sezione prima o dopo lintersezione con la piramide. Per = 1 le
due superci coincidono e il dominio si trova in corrispondenza dello stato critico.
Legge di usso
Nello spirito del CamClay originario, si assume una legge di usso associata. La supercie di
snervamento coincide allora con il potenziale di usso del modello. I gradienti alla supercie
Geomateriali 93
Figura 3.11: Rappresentazione del dominio di snervamento nello spazio (p,q) e generalizzazione nello spazio
delle tensioni principali (1,2,3.
nello spazio delle tensioni, relativamente alle tre falde di interesse, sono rappresentati dai vettori
j
=
Z
j
con j {1, 2, 3} (3.234)
In particolare:
1
=
1
36 sin
2
14 5 cos
2
6 sin
1
+
12 sin + 4 4 cos
2
2
+
8 10 cos
2
3
+
24 p
c
+ 24 p
c
cos
2
12 sin + 4 4 cos
2
1
+ 2
8 8 cos
2
2
+
4 4 cos
2
12 sin
3
+
24 p
c
+ 24 p
c
cos
2
8 10 cos
2
1
+
4 4 cos
2
12 sin
2
+2
14 5 cos
2
+ 6 sin
3
+
24 p
c
+ 24 p
c
cos
2
(3.235)
2
=
1
36 sin
2
8 8 cos
2
1
+
12 sin + 4 4 cos
2
2
+
4 4 cos
2
12 sin
3
+
24 p
c
+ 24 p
c
cos
2
12 sin + 4 4 cos
2
1
+ 2
14 5 cos
2
6 sin
2
+
8 10 cos
2
3
+
24 p
c
+ 24 p
c
cos
2
4 4 cos
2
12 sin
1
+
8 10 cos
2
2
+2
14 5 cos
2
+ 6 sin
3
+
24 p
c
+ 24 p
c
cos
2
(3.236)
Geomateriali 94
3
=
1
36 sin
2
14 5 cos
2
6 sin
1
+
8 10 cos
2
2
+
12 sin + 4 4 cos
2
3
+
24 p
c
+ 24 p
c
cos
2
8 10 cos
2
1
+ 2
14 5 cos
2
+ 6 sin
2
+
12 sin + 4 4 cos
2
3
+
24 p
c
+ 24 p
c
cos
2
4 4 cos
2
12 sin
1
+
4 4 cos
2
12 sin
2
+2
8 8 cos
2
3
+
24 p
c
+ 24 p
c
cos
2
(3.237)
Condizioni di singolarit`a
Il potenziale plastico coincide con la funzione di snervamento, quindi la legge di usso `e associata.
La direzione del correttore delle tensioni `e sempre normale al dominio. Nel piano p q, poich`e
lellisse presenta una tangente verticale allintersezione con lasse p, i punti da cui si eettuerebbe
un ritorno su tali intersezioni appartengono necessariamente allasse stesso. Nello spazio
1
3
, sullasse p convergono le 6 falde del dominio, ma la regione interna al cono delle normali
si riduce ad una semiretta. Essa giace per lappunto sullasse delle p ed ha origine allitersezione
del dominio con tale asse.
Non ci sono pertanto in questo modello singolarit`a di apice da controllare. Le uniche zone
irregolari del dominio sono rappresentate da singolarit`a di spigolo.
Abbiamo gi`a denito il vettore delle direzioni di usso che in questo caso, di potenziale
associato, corrisponde alla denizione
= C (3.238)
Nel caso di ritorno a vettore singolo, la correzione del moltiplicatore sarebbe data dallespressione
1
=
Z
1
T
1
1
+ A
11
(3.239)
valida, si intende, nella i
esima
iterazione, e la correzione delle tensioni dalla corrispondente
(i+1)
=
(i)
(i)
1
(i)
1
. (3.240)
Pertanto gli indicatori di singolarit`a vengono deniti direttamente dalle espressioni sintetiche
12
= (
1
2
)
(i)
Z
1
(
1
2
)
1
G
11
(i)
(3.241)
e
23
= (
2
3
)
(i)
Z
1
(
2
3
)
1
G
11
(i)
(3.242)
Geomateriali 95
dove G
11
=
T
1
1
+ A
11
.
Nel caso
12
> 0, si risolver` a il sistema
G
11
G
12
G
21
G
22
Z
1
Z
2
(3.243)
mentre nel caso
23
> 0, si risolver` a il sistema
G
11
G
13
G
31
G
33
Z
1
Z
3
(3.244)
Si forniscono pertanto le espressioni dei generici termini G
ij
=
T
i
j
+ A
ij
G
11
=
1
18 sin
4
E
(1 + )(2 1)
4 cos
2
sin 16 2 cos
2
sin
4 cos
2
+ 24 + 10 cos
2
16 sin 3 cos
4
2 cos
4
+ 8 sin
2
1
+
32 sin + 24 cos
2
+ 4 cos
2
8 cos
2
sin
16 sin 16 + 4 cos
2
sin 4 cos
4
8 cos
4
2
+
48 + 8 cos
2
4 cos
4
+ 16 cos
2
+ 16 6 cos
4
3
+16 cos
4
p
c
32 p
c
cos
2
+ 16 cos
4
p
c
+ 16 p
c
32 cos
2
p
c
+ 16 p
c
1
+
8 + 8 4 cos
4
8 cos
2
+ 12 cos
2
2
2
+
4 cos
4
+ 8 cos
2
sin 32 sin + 4 cos
2
+16 sin 16 + 24 cos
2
8 cos
4
4 cos
2
sin
3
+16 cos
4
p
c
32 p
c
cos
2
+ 16 cos
4
p
c
+ 16 p
c
32 cos
2
p
c
+ 16 p
c
2
+
3 cos
4
+ 16 sin + 10 cos
2
8 sin 4 cos
2
16
+2 cos
2
sin 2 cos
4
4 cos
2
sin + 24
2
3
+
16 cos
4
p
c
32 p
c
cos
2
+ 16 cos
4
p
c
+ 16 p
c
32 cos
2
p
c
+ 16 p
c
3
+48 p
2
c
cos
2
24 p
2
c
cos
4
+ 48 p
2
c
cos
2
24 p
2
c
cos
4
24 p
2
c
24 p
2
c
+ A
11
(3.245)
Geomateriali 96
G
12
=
1
36 sin
4
E
(1 + )(2 1)
24 24 sin 5 cos
4
8 cos
2
+ 32
+48 sin + 20 cos
2
6 cos
4
2
3
+
48 + 8 + 40 cos
2
48 sin
11 cos
4
+ 12 cos
2
10 cos
4
+ 24 sin
1
+
48 + 8 + 40 cos
2
48 sin 11 cos
4
+ 12 cos
2
10 cos
4
+ 24 sin
2
+32 p
c
cos
4
64 p
c
cos
2
+ 32 p
c
+ 32 p
c
+ 32 cos
4
p
c
64 p
c
cos
2
3
+
16 + 22 cos
2
+ 16 6 cos
4
12 cos
2
6 cos
2
sin
+12 cos
2
sin 4 cos
4
2
1
+
14 cos
4
8 + 8 cos
2
+ 48 sin
+48 cos
2
24 cos
2
sin + 12 cos
2
sin 9 cos
4
24 sin 16
2
+32 p
c
cos
4
64 p
c
cos
2
+ 32 p
c
+ 32 p
c
+ 32 cos
4
p
c
64 p
c
cos
2
1
+
16 + 22 cos
2
+ 16 6 cos
4
12 cos
2
6 cos
2
sin
+12 cos
2
sin 4 cos
4
2
2
+
32 p
c
cos
4
64 p
c
cos
2
+ 32 p
c
+32 p
c
+ 32 cos
4
p
c
64 p
c
cos
2
2
48 p
c
2
cos
4
+ 96 p
c
2
cos
2
+96 p
c
2
cos
2
48 p
c
2
cos
4
48 p
c
2
48 p
c
2
+ A
12
(3.246)
Geomateriali 97
G
13
=
1
36 sin
4
E
(1 + )(2 1)
22 cos
2
6 cos
4
12 cos
2
+ 16
16 4 cos
4
+ 6 cos
2
sin 12 cos
2
sin
2
3
+
48 + 40 cos
2
11 cos
4
+48 sin 24 sin + 8 10 cos
4
+ 12 cos
2
1
+
16 + 8 cos
2
8 + 24 sin 9 cos
4
14 cos
4
12 cos
2
sin
48 sin + 24 cos
2
sin + 48 cos
2
2
+32 p
c
cos
4
64 p
c
cos
2
+ 32 p
c
+ 32 p
c
+ 32 cos
4
p
c
64 p
c
cos
2
3
+
20 cos
2
48 sin 5 cos
4
24
6 cos
4
8 cos
2
+ 32 + 24 sin
2
1
+
48 + 40 cos
2
11 cos
4
+ 48 sin
24 sin + 8 10 cos
4
+ 12 cos
2
2
+32 p
c
cos
4
64 p
c
cos
2
+ 32 p
c
+ 32 p
c
+ 32 cos
4
p
c
64 p
c
cos
2
1
+
22 cos
2
6 cos
4
12 cos
2
+ 16
16 4 cos
4
+ 6 cos
2
sin 12 cos
2
sin
2
2
+
32 p
c
cos
4
64 p
c
cos
2
+ 32 p
c
+ 32 p
c
+ 32 cos
4
p
c
64 p
c
cos
2
2
48 p
2
c
cos
4
48 p
2
c
+ 96 p
2
c
cos
2
+ 96 p
2
c
cos
2
48 p
2
c
cos
4
48 p
2
c
+ A
13
(3.247)
Geomateriali 98
G
21
=
1
36 sin
4
E
(1 + )(2 1)
24 5 cos
4
24 sin + 48 sin
+32 + 20 cos
2
6 cos
4
8 cos
2
2
3
+
10 cos
4
+ 12 cos
2
+ 40 cos
2
+ 24 sin
+8 48 11 cos
4
48 sin
1
+
10 cos
4
+ 12 cos
2
+ 40 cos
2
+ 24 sin
+8 48 11 cos
4
48 sin
2
64 p
c
cos
2
64 p
c
cos
2
+ 32 p
c
+ 32 cos
4
p
c
+ 32 p
c
+ 32 p
c
cos
4
3
+
16 6 cos
4
+ 22 cos
2
6 cos
2
sin
+12 cos
2
sin 12 cos
2
4 cos
4
16
2
1
+
14 cos
4
+ 8 cos
2
+ 12 cos
2
sin + 48 cos
2
24 cos
2
sin
8 9 cos
4
24 sin + 48 sin 16
2
64 p
c
cos
2
64 p
c
cos
2
+ 32 p
c
+ 32 cos
4
p
c
+ 32 p
c
+ 32 p
c
cos
4
1
+
16 6 cos
4
+ 22 cos
2
6 cos
2
sin
+12 cos
2
sin 12 cos
2
4 cos
4
16
2
2
+
64 p
c
cos
2
64 p
c
cos
2
+ 32 p
c
+ 32 cos
4
p
c
+ 32 p
c
+ 32 p
c
cos
4
2
+96 p
2
c
cos
2
48 p
2
c
48 p
2
c
48 p
2
c
cos
4
48 p
2
c
cos
4
+ 96 p
2
c
cos
2
+ A
21
(3.248)
Geomateriali 99
G
22
=
1
18 sin
4
E
(1 + )(2 1)
24 16 4 cos
2
+ 2 cos
2
sin
2 cos
4
+ 16 sin 8 sin + 10 cos
2
3 cos
4
4 cos
2
sin
2
3
+
4 cos
2
sin 16 8 cos
4
4 cos
4
+ 4 cos
2
+ 16 sin
+8 cos
2
sin + 24 cos
2
32 sin
1
+
16 6 cos
4
4 cos
4
+ 8 cos
2
+ 16 cos
2
48
2
+16 p
c
cos
4
+ 16 p
c
+ 16 p
c
+ 16 cos
4
p
c
32 p
c
cos
2
32 p
c
cos
2
3
+
4 cos
4
8 cos
2
8 + 12 cos
2
+ 8
2
1
+
4 cos
4
+ 4 cos
2
16 + 24 cos
2
8 cos
2
sin + 32 sin
8 cos
4
+ 4 cos
2
sin 16 sin
2
+16 p
c
cos
4
+ 16 p
c
+ 16 p
c
+ 16 cos
4
p
c
32 p
c
cos
2
32 p
c
cos
2
1
+
8 sin + 10 cos
2
16 4 cos
2
2 cos
2
sin 16 sin
2 cos
4
+ 4 cos
2
sin 3 cos
4
+ 24
2
2
+
16 p
c
cos
4
+ 16 p
c
+ 16 p
c
+ 16 cos
4
p
c
32 p
c
cos
2
32 p
c
cos
2
2
24 p
2
c
cos
4
24 p
2
c
+ 48 p
2
c
cos
2
24 p
2
c
cos
4
24 p
2
c
+ 48 p
2
c
cos
2
(3.249)
Geomateriali 100
G
31
=
1
36 sin
4
E
(1 + )(2 1)
12 cos
2
+ 6 cos
2
sin
6 cos
4
12 cos
2
sin + 16 16 + 22 cos
2
4 cos
4
2
3
+
8 + 12 cos
2
24 sin 11 cos
4
48
+48 sin + 40 cos
2
10 cos
4
1
+
12 cos
2
sin 16 + 8 cos
2
+ 24 cos
2
sin 14 cos
4
9 cos
4
8 48 sin + 24 sin + 48 cos
2
2
64 p
c
cos
2
64 p
c
cos
2
+ 32 p
c
+ 32 p
c
+ 32 cos
4
p
c
+ 32 p
c
cos
4
3
+
8 cos
2
+ 32 24 + 20 cos
2
+ 24 sin
48 sin 5 cos
4
6 cos
4
2
1
+
8 + 12 cos
2
24 sin 11 cos
4
48
+48 sin + 40 cos
2
10 cos
4
2
64 p
c
cos
2
64 p
c
cos
2
+ 32 p
c
+ 32 p
c
+ 32 cos
4
p
c
+ 32 p
c
cos
4
1
+
12 cos
2
+ 6 cos
2
sin 6 cos
4
12 cos
2
sin
+16 16 + 22 cos
2
4 cos
4
2
2
+
64 p
c
cos
2
64 p
c
cos
2
+ 32 p
c
+ 32 p
c
+ 32 cos
4
p
c
+ 32 p
c
cos
4
2
+96 p
2
c
cos
2
48 p
2
c
cos
4
48 p
2
c
cos
4
48 p
2
c
48 p
2
c
+ 96 p
2
c
cos
2
+ A
31
(3.250)
Geomateriali 101
G
33
=
1
18 sin
4
E
(1 + )(2 1)
8 8 + 12 cos
2
4 cos
4
8 cos
2
2
3
+
32 sin 4 cos
4
8 cos
4
+ 4 cos
2
+ 24 cos
2
16 16 sin + 4 cos
2
sin 8 cos
2
sin
1
+
16 sin 16 + 4 cos
2
8 cos
4
4 cos
4
4 cos
2
sin
+8 cos
2
sin + 24 cos
2
32 sin
2
32 p
c
cos
2
+ 16 cos
4
p
c
32 p
c
cos
2
+ 16 p
c
+ 16 p
c
cos
4
+ 16 p
c
3
+
24 2 cos
2
sin 16 sin 3 cos
4
2 cos
4
4 cos
2
16 + 4 cos
2
sin + 10 cos
2
+ 8 sin
2
1
+
48 4 cos
4
6 cos
4
+ 16 cos
2
+ 8 cos
2
+ 16
2
32 p
c
cos
2
+ 16 cos
4
p
c
32 p
c
cos
2
+ 16 p
c
+ 16 p
c
cos
4
+ 16 p
c
1
+
4 cos
2
16 2 cos
4
8 sin + 16 sin + 24 + 10 cos
2
+2 cos
2
sin 3 cos
4
4 cos
2
sin
2
2
+
32 p
c
cos
2
+ 16 cos
4
p
c
32 p
c
cos
2
+ 16 p
c
+ 16 p
c
cos
4
+ 16 p
c
2
+48 p
2
c
cos
2
24 p
2
c
cos
4
24 p
2
c
cos
4
+ 48 p
2
c
cos
2
24 p
2
c
24 p
2
c
+ A
33
(3.251)
Legge di incrudimento
Il modello, nella formulazione adatta per carichi crescenti monotonicamente, presenta un incrudi-
mento isotropo. La scelta della variabile interna, nei modelli allo stato critico, ricade tipicamente
nella deformazione plastica di volume, da cui viene fatto dipendere direttamente la posizione del
centro dellellisse nel piano (p q).
p
c
= p
c
(
p
v
) (3.252)
Tale posizione, come si evince dalla discussione precedente, determina inequivocabilmente lampiez-
za del dominio elastico. E, in qualche modo, lanaloga della legge k = k(
p
eq
) vista nel caso
dellincrudimento isotropo del modello di Mises.
Geomateriali 102
La scelta della funzione (3.252) non `e arbitraria, o dettata da considerazioni oltremodo
semplicative, bens` discende direttamente dal tipico andamento del diagramma di compressione
di un provino in condizioni edometriche. In tali condizioni infatti, `e possibile esprimere la
Figura 3.12: Curva di compressione in condizioni edometriche.
variazione di volume direttamente dagli abbassamenti
v
=
V
V
0
H
H
0
(3.253)
Daltra parteper convenzione `e positivo laumento di volumepossiamo riferirci direttamente
allindice dei vuoti
v
=
e e
0
1 + e
0
(3.254)
Tale variazione di volume `e suscettibile della legge di decomposizione additiva
v
=
e
v
+
p
v
(3.255)
Con riferimento alla g(), si rileva che la deformazione elatoplastica di volume `e espressa
dalla
e e
0
= ln
p
c
p
c0
(3.256)
mentre la deformazione puramente plastica
e
e
0
= e e
0
+ ln
p
c
p
c0
(3.257)
Geomateriali 103
ovvero
e
e
0
= ( ) ln
p
c
p
c0
(3.258)
poich`e
p
v
=
e
e
0
1 + e
0
(3.259)
discende che
ln
p
c
p
c0
=
p
v
(3.260)
dove
=
1 + e
0
(3.261)
da cui la relazione cercata
p
c
= p
c0
exp(
p
v
) (3.262)
`e una costante durante lanalisi, che discende dalle caratteristiche del materiale misurabili da
un diagramma del tipo in g. ??. Da tale diagramma, tramite metodi noti in geotecnica, si
evince la pressione di preconsolidazione p
c0
e il corrispondente grado di compattazione e
0
. Il
modello `e allora retto da una legge di incrudimento strainhardening con variabile interna
q
p
v
=
Z
t
0
(
p
1
+
p
2
+
p
3
) dt (3.263)
Bisogna adesso legare la variazione della variabile interna al corrispondente modulo plastico
q =
h(, q) (3.264)
Nel caso J
act
= {1} avremo che
p
v
=
Z
1
1
+
Z
1
2
+
Z
1
(3.265)
Nel caso J
act
= {1, k}, con k {2, 3}
p
i
=
1
Z
1
i
+
k
Z
k
i
con i 1, 2, 3 (3.266)
e
p
v
=
3
X
i=1
p
i
(3.267)
allora se deniamo il vettore unitario
def
=
1
1
1
(3.268)
Geomateriali 104
possiamo esprimere la deformazione volumetrica tramite la
p
v
=
X
jJact
j
(3.269)
da cui si evince che
h
i
=
T
i
coni {1, 2, 3} (3.270)
cio`e valido per le tre falde del dominio.
In altre parole il modulo plastico, relativo alla i
esima
falda `e espresso dalla somma delle compo-
nenti del relativo vettore di usso
i
. E facile controllare che
h
1
= 2(p p
c
)
h
2
= 2(p p
c
)
h
3
= 2(p p
c
)
(3.271)
dove p =
1
+
2
+
3
3
.
Si determina inne il gradiente della funzione di snervamento nello spazio delle variabili interne
= (, q).
Il dominio `e espresso dalla (3.212)
Z := (p p
c
)
2
+
q
2
tan
2
C
tan
p
c
2
= 0 (3.272)
e
=
Z
q
Z
p
c
p
c
p
v
(3.273)
poich`e
C
tan
=
c
tan
(3.274)
esso `e indipendente dallequazione delle singole falde ed assume in tutti i casi lespressione
= 2
c
tan
p
[p
c0
exp(
p
v
)] (3.275)
La legge di incrudimento, insieme alla legge di usso prima discussa, modellano un comporta-
mento di tipo hardening per punti tensione che persistono nella zona del dominio al di sotto
della supercie di stato critico, rappresentativi di condizioni leggermente sovraconsolidate o nor-
mal consolidate. Viceversa, modellano un comportamento di tipo softening per punti tensione
che partono in condizioni molto sovraconsolidatein prossimit`a delloriginee raggiungono il
dominio nella zona al di sopra della CSL.
Leetto `e governato dallentit` a della
p
v
, misurata dalla pendenza del vettore di usso. Tale
pendenza `e negativa (contrazione volumetrica), quando la supercie viene raggiunta nella zona
hardening, ed il dominio si espande nch`e il punto tensione non raggiunge lo stato critico.
Geomateriali 105
Il discorso `e analogo per il caso softening, salvo che la pendenza iniziale del usso `e positiva
(espansione volumetrica), associata ad una contrazione del dominio nch`e il punto tensione non
raggiunge lo stato critico.
In ambedue i casi, dal raggiungimento dello stato ctitico in poi, il usso plastico ha direzione
verticale e le uniche componenti di deformazione plastica sono essenzialmente deviatoriche.
Si riporta, a scopo illustrativo, un semplice caso di sperimentazione numerica, nel quale si
immagina di estrarre un provino di materiale argilloso che abbia subito una consolidazione di
tipo edometrico con coeciente di spinta a riposo K(NC)= 0.5. I valori delle tensioni massime
sopportate siano
max
1
= 100 kPa e
max
3
= K(NC)
max
1
= 50 kPa. Il provino viene allora
scaricato, aumentando di volume, no a raggiungere un certo rapporto di sovraconsolidazione.
Questa fase f` a parte dellanalisi e si registrano di conseguenza delle deformazioni positive di
partenza nei casi con OCR6= 1. Da questo momento viene condotta una analisi incrementale
alla Riks, in cui si vede come, dopo un primo tratto elastico, pi` u o meno accentuato, si prosegue
sulle corrispondenti curve di equilibrio elastoplastiche, ciascuna con il comportamento atteso.
0.05 0 -0.05 -0.1 -0.15 -0.2 -0.25 -0.3 -0.35
1
0
10
20
30
40
50
60
70
|
1
1
0
| (kPa)
OCR = 1
OCR = 1.25
OCR = 2
OCR = 4
OCR = 10
OCR = 20
OCR = 100
Figura 3.13: a)Risposta di un materiale argilloso per diversi rapporti di sovraconsolidazione: OCR=
max
1
/
0
1
.
Si mostrano i risultati al variare di OCR. b)Schema geometrico e caratteristiche materiali.
Bibliograa
[1] Hill R., The Mathematical Theory of Plasticity, Oxford University Press, Oxford U. K.,
1950.
[2] Schoeld A. and Wroth P., Critical State Soil Mechanics, McGrawHill Publishing
Company Limited, 1968.
[3] Terzaghi K. and Peck R. B. Geotecnica, UTET, 1974.
[4] Britto A. M. and Gunn M. J., Critical State Soil Mechanics Via Finite Elements, Hellis
Horwood Limited, 1987.
[5] Lubliner J., Plasticity Theory, University of California at Berkeley, Macmillan Publishing
Company, 1990.
[6] Lancellotta R., Geotecnica, Zanichelli, 1993.
[7] Simo J. and Hughes T. J. R., Computational Inelasticity, SpringerVerlag, New York, 1998.
[8] Lewis R.W. and Schreer B. A., The Finite Element Method in the Static and Dynamic
Deformation and Consolidation of Porous Media, Wiley, 1998.
[9] Woods R. and Rahim A., SAGE CRISP Technical Reference Manual Ver. 4, SAGE
Engineering Ltd,(1999).
[10] Zienkiewicz O. C., Valliappan S. and King I. P., Elasto-Plastic Solutions of Engineering
Problems Initial Stress, Finite Element Approach, International Journal for Numerical
Methods in Engineering, 1, 75-100 (1969).
[11] Ponter A. R. S. and Martin J. B., Some Extremal Properties and Energy Theorems
for Inelastic Materials and their Relationship to the Deformation Theory of Plasticity,
J.Mech.Phys.Solids, 20, 281-300 (1972).
[12] Nayak G. C. and Zienkiewicz O. C., Convenient Form of Stress Invariants for Plasticity,
J. Struct. Div., Proc. ASCE, 98, 949-954 (1972).
107
[13] Zienkiewicz O. C. and Cormeau, I.C, Visco-Plasticity-Plasticity and Creep in Elastic
Solids. A Unied Numerical Solution Approach., International Journal for Numerical
Methods in Engineering, 8, 821-845 (1974).
[14] Nagtegaal J. C., Parks D. M. and Rice J. R., On Numerically Accurate Finite Ele-
ment Solutions in the Fully Plastic Range, Computer Methods in Applied Mechanics and
Engineering, 4, 153-177 (1974).
[15] Zienkiewicz O. C., Humpheson C. and Lewis R. W., Associated and Non-Associated Visco-
Plasticity and Plasticity in Soil Mechanics, Geotecnique, 25, 671-689 (1975).
[16] Hughes T. J. R., Generalization of Selective Integration Procedures to Anisotropic and
Nonlinear Media, International Journal for Numerical Methods in Egineering, 15, 1413-
1418 (1980).
[17] Riks E., An Incremental Approach to the Solution of Snapping and Buckling Problems,
Int. J. Solids Structures, 15, 529-551 (1979).
[18] Michelis P. N., Worksoftening and hardening behaviourof granular rocks, Rock Mechanics,
14, 187-200 (1981).
[19] Casciaro R. and Cascini L., A Mixed Formulation and Mixed Finite Elements for Limit
Analysis, International Journal for Numerical Methods in Engineering, 18, 211-243 (1982).
[20] Casciaro R. and Vencia G., Programma agli elementi niti per lanalisi limite di continui
elastoplastici in deformazione e tensione piana con metodologia incrementale, Report,
CRAI, Cosenza (1983).
[21] Marques J. M. M. C., Stress Computation in Elastoplasticity, Engineering Computation,
1, 42-51 (1984).
[22] Hettler A. and Vardoulakis I., Behaviour of dry sand tested in a large triaxial apparatus,
Geotecnique, 34, 183-198 (1984).
[23] Vermeer P. A. and de Borst R., Non-Associated Plasticity for Soils, Concrete and Rock,
Heron, 29, (3) (1984).
[24] Simo J. C. and Taylor R. L., Consistent Tangent Operators for Rate-Independent
Elastoplasticity, Computer Methods in Applied Mechanics and Engineering, 48, 101-118
(1985).
[25] Ortiz M. and Popov E. P., Accuracy and Stability of Integration Algorithms for Elastoplas-
tic Constitutive Equations, International Journal for Numerical Methods in Engineering,
21, 1561-1576 (1985).
[26] Simo J. C. and Ortiz M., A Unied Approach to Finite Deformation Elastoplastic Analysis
Based on the Use of Hiperelastic Constitutive Equations, Computer Methods in Applied
Mechanics and Engineering, 49, 221-245 (1985).
[27] Loret B. and Prevost J. H., Accurate Numerical Solutions for Drucker-Prager Elastic-
Plastic Models, Computer Methods in Applied Mechanics and Engineering, 54, 259-277
(1986).
[28] Ortiz M. and Simo J., An Analysis of a New Class of Integration Algorithms for Elasto-
plastic Constitutive Equations, International Journal for Numerical Methods in Egineering,
23, 353-366 (1986).
[29] de Borst R., Integration of Plasticity Equations for Singular Yield Functions, Computers
and Structures, 26, 823-829 (1987).
[30] Simo J. C., Kennedy J. C. and Govindjee S., Non-Smooth Multisurface Plasticity and
Viscoplasticity. Loading/Unloading Conditions and Numerical Algorithms, International
Journal for Numerical Methods in Engineering, 26, 2161-2185 (1988).
[31] Ortiz M. and Martin J. B., Simmetry-Preserving Return Mapping Algorithms and Incre-
mentally Extremal Paths: A Unication of Concepts, International Journal for Numerical
Methods in Engineering, 28, 1839-1853 (1989).
[32] Casciaro R. and Mancuso M., Un Metodo Numerico per Problemi di Plasticit` a, Report.
No. 121, Dipartimento di strutture,Universit`a della calabria , (1990).
[33] de Borst R., Pankaj and N. Bicanic A Note on Singularity Indicators for Mohr-Coulomb
Type Yield Criteria, Computers and Structures, 39, 219-220 (1991).
[34] Pankaj and N. Bicanic Detection of Multiple Active Yield Conditions for Mohr-Coulomb
Elasto-Plasticity, Computers and Structures, 62, 51-61 (1997).
[35] de Borst R. and Groen A. E., Some Observations on Element Performance in Isochorich
and Dilatant Plastic Flow, International Journal for Numerical Methods in Engineering,
38, 2887-2906 (1995).
[36] Zimmermann Th., Truty A. and Commend S., A Comparison of Finite Element
Enhancements for Incompressible and Dilatant Behavior of Geomaterials, ??, ?, ?-? (?).
[37] Bilotta A., Formulazione di Elementi Finiti ad Alte Prestazioni Mediante un Approccio
assumed stress, PhdThesis, Dipartimento di strutture,Universit` a della Calabria,(1998).
Das könnte Ihnen auch gefallen
- Lezione16 Aste ComposteDokument18 SeitenLezione16 Aste ComposteAndreaMercuriNoch keine Bewertungen
- Dai Rifiuti alla Passerella: Una guida per riciclare vecchi vestiti in capi uniciVon EverandDai Rifiuti alla Passerella: Una guida per riciclare vecchi vestiti in capi uniciNoch keine Bewertungen
- Geometria Delle MasseDokument44 SeitenGeometria Delle MasseMa RcoNoch keine Bewertungen
- La Volta A Stella PDFDokument16 SeitenLa Volta A Stella PDFSalvatoreBuccolieroNoch keine Bewertungen
- Propagazione OndeDokument32 SeitenPropagazione OndeAle85toNoch keine Bewertungen
- Quaderno 2 PDFDokument47 SeitenQuaderno 2 PDFGianluca de RisiNoch keine Bewertungen
- Piastre Di Base PDFDokument13 SeitenPiastre Di Base PDFasantori6133Noch keine Bewertungen
- Volte Sottili Areticolari DelGuerraDokument37 SeitenVolte Sottili Areticolari DelGuerraPriscilla CombsNoch keine Bewertungen
- SDC Parte 5 FDokument85 SeitenSDC Parte 5 Fbosnia76100% (1)
- Cupole Lezione26032013 PDFDokument34 SeitenCupole Lezione26032013 PDFMarco Francesco FunariNoch keine Bewertungen
- Calcestruzzo Confinato, Verifiche Di Duttilità e Dettagli Di DuttilitàDokument13 SeitenCalcestruzzo Confinato, Verifiche Di Duttilità e Dettagli Di DuttilitàPippo FrancoNoch keine Bewertungen
- Domini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateVon EverandDomini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateNoch keine Bewertungen
- Teoria Delle Piastre InflesseDokument57 SeitenTeoria Delle Piastre InflesseGiuseppe GentileNoch keine Bewertungen
- 17-Solai Misti Legno Calcestruzzo Metodi Di VerificaDokument19 Seiten17-Solai Misti Legno Calcestruzzo Metodi Di Verificamich7bellNoch keine Bewertungen
- 4 Metodi Soluzione PiastreDokument27 Seiten4 Metodi Soluzione PiastreAleksiey PellicciaNoch keine Bewertungen
- Appunti Sui PilastriDokument21 SeitenAppunti Sui PilastriserafiniNoch keine Bewertungen
- Legame CostitutivoDokument3 SeitenLegame CostitutivofrecciaaaNoch keine Bewertungen
- Caratterizzazione SperimentaleDokument7 SeitenCaratterizzazione SperimentaleLaurent ElenaNoch keine Bewertungen
- 04.2 Costruzioni in AcciaioDokument30 Seiten04.2 Costruzioni in AcciaioClaudio NastasiNoch keine Bewertungen
- 3b. Legame CostitutivoDokument19 Seiten3b. Legame CostitutivoGiovanniCuocoNoch keine Bewertungen
- Criteri Di ResistenzaDokument14 SeitenCriteri Di ResistenzasentimharottorcazzNoch keine Bewertungen
- Disegno 2-ModelloDokument1 SeiteDisegno 2-ModelloRossNoch keine Bewertungen
- 12 Elasticita e PlasDokument69 Seiten12 Elasticita e PlasLuca TalentiNoch keine Bewertungen
- Teoremi Della Plasticità (Limite Inferiore e Superiore)Dokument40 SeitenTeoremi Della Plasticità (Limite Inferiore e Superiore)Giuseppe GentileNoch keine Bewertungen
- Relazione Di Fisica: Il Pendolo SempliceDokument3 SeitenRelazione Di Fisica: Il Pendolo SempliceMaurizioNoch keine Bewertungen
- Relazione Fisica Studio Sul Motob Rettilineo UniformeDokument4 SeitenRelazione Fisica Studio Sul Motob Rettilineo UniformeMicheleVenturi100% (1)
- Criteri Di SicurezzaDokument18 SeitenCriteri Di SicurezzaFrancesco Di SarnoNoch keine Bewertungen
- 01cap Libro PDFDokument14 Seiten01cap Libro PDFAlberipaNoch keine Bewertungen
- MANUALEDokument26 SeitenMANUALEGeorge StefNoch keine Bewertungen
- Lezione 12 - I Cerchi Di MohrDokument10 SeitenLezione 12 - I Cerchi Di MohrriccardoNoch keine Bewertungen
- Carta Di Controllo Per VariabiliDokument53 SeitenCarta Di Controllo Per VariabiliGarden005Noch keine Bewertungen
- PianoDokument23 SeitenPianoDiana Teodora HuzumNoch keine Bewertungen
- Elementi Di PiastraDokument18 SeitenElementi Di PiastraD'Armi StefanoNoch keine Bewertungen
- (TESI) - Evoluzione Delle Caratteristiche Degli Acciaio Da CA Dal 60 Ai Giorni NostriDokument183 Seiten(TESI) - Evoluzione Delle Caratteristiche Degli Acciaio Da CA Dal 60 Ai Giorni NostriDaniele Dominic ColluraNoch keine Bewertungen
- Appunti Su Solaio in CLSDokument16 SeitenAppunti Su Solaio in CLSIlenia Raperonzolo GabrieleNoch keine Bewertungen
- Relazione Di FisicaDokument3 SeitenRelazione Di FisicaAngelo Leo50% (2)
- TecnologiameccanicaDokument52 SeitenTecnologiameccanicaFabio DondiNoch keine Bewertungen
- Hagane - Tesina Sull'AcciaioDokument83 SeitenHagane - Tesina Sull'Acciaiokazeatari100% (1)
- ViscoelasticitàDokument30 SeitenViscoelasticitàGiuseppe VignolaNoch keine Bewertungen
- Legame Costitutivo MaterialiDokument16 SeitenLegame Costitutivo MaterialiIl Conte CamiNoch keine Bewertungen
- Baricentro Di Figure ComposteDokument2 SeitenBaricentro Di Figure ComposteEmanuele MeloniNoch keine Bewertungen
- CelleElemAcciaioGhisa PDFDokument47 SeitenCelleElemAcciaioGhisa PDFkatiaNoch keine Bewertungen
- ScaleDokument17 SeitenScalenalagoNoch keine Bewertungen
- Appunti Materiali Da CostruzioneDokument16 SeitenAppunti Materiali Da CostruzioneFausto FaviaNoch keine Bewertungen
- Nappi 1-06Dokument1 SeiteNappi 1-06Matteo FrassonNoch keine Bewertungen
- Elementi FinitiDokument76 SeitenElementi FinitiMa RcoNoch keine Bewertungen
- Formula RioDokument28 SeitenFormula RioMarta CerenziaNoch keine Bewertungen
- Capitolo 2. Fatica Oligociclica - 2436341Dokument4 SeitenCapitolo 2. Fatica Oligociclica - 2436341mgualdiNoch keine Bewertungen
- Ritiro e ViscositàiDokument53 SeitenRitiro e ViscositàiIvoGraziotinNoch keine Bewertungen
- Appunti Di C.A.P 6 GuyonDokument50 SeitenAppunti Di C.A.P 6 GuyonFilippo De PasqualeNoch keine Bewertungen
- Appunti Esercitazioni Guida Ansys 12Dokument294 SeitenAppunti Esercitazioni Guida Ansys 12Emanuele ButtàNoch keine Bewertungen
- Dispense 7 9Dokument63 SeitenDispense 7 9Simone RutiglianoNoch keine Bewertungen
- I Tufi VulcaniciDokument211 SeitenI Tufi Vulcanicivirgus87Noch keine Bewertungen
- Sezioni in Calcestruzzo - Flessione Semplice A SLUDokument11 SeitenSezioni in Calcestruzzo - Flessione Semplice A SLUVincenzo PanasitiNoch keine Bewertungen
- 2011-11-23 Orlando Esempio CapannoneDokument82 Seiten2011-11-23 Orlando Esempio CapannoneLucaRampiniNoch keine Bewertungen
- 20 Lezione 18 Gusci - 492..524 PDFDokument33 Seiten20 Lezione 18 Gusci - 492..524 PDFElvira VallarioNoch keine Bewertungen
- Danusso - Le Autotensioni - Milan Journal of Mathematics Vol 8 Issue 1 1934Dokument30 SeitenDanusso - Le Autotensioni - Milan Journal of Mathematics Vol 8 Issue 1 1934lucaNoch keine Bewertungen
- La Ripartizione Dei Carichi - Bozza 1Dokument41 SeitenLa Ripartizione Dei Carichi - Bozza 1DonaldDuck1985100% (1)
- Dispensa Mms PDFDokument124 SeitenDispensa Mms PDFGaetano ColamariaNoch keine Bewertungen
- STABILITàDokument38 SeitenSTABILITàMariarosaria MangiaNoch keine Bewertungen