Das könnte Ihnen auch gefallen
- Knowledge is "Real Power": Introduction to Power QualityVon EverandKnowledge is "Real Power": Introduction to Power QualityNoch keine Bewertungen
- Technical Complementary Guide 2013Dokument256 SeitenTechnical Complementary Guide 2013brightstardustNoch keine Bewertungen
- Electrical Design and Installation PractDokument5 SeitenElectrical Design and Installation PractAddisu TsehayNoch keine Bewertungen
- Cat C80Dokument2 SeitenCat C80Imola MovidaNoch keine Bewertungen
- Three-Phase Digital 4-Stage Frequency Relay WITH DF/DT AND DV/DT CONTROLDokument2 SeitenThree-Phase Digital 4-Stage Frequency Relay WITH DF/DT AND DV/DT CONTROLshekooferiahiNoch keine Bewertungen
- CYMTCC For Windows: User's Guide and Reference ManualDokument290 SeitenCYMTCC For Windows: User's Guide and Reference ManualJosselynGalloMuñozNoch keine Bewertungen
- Toshiba n5ss Chassis Training Manual (Et)Dokument173 SeitenToshiba n5ss Chassis Training Manual (Et)Jose Domingo Maltez VallecilloNoch keine Bewertungen
- SKM Product BrochureDokument48 SeitenSKM Product BrochureyalmanzaNoch keine Bewertungen
- 05 PilotProjectGridScaleBESS EGATDokument34 Seiten05 PilotProjectGridScaleBESS EGATPongsakorn NakkharaNoch keine Bewertungen
- A Novel Scheme To Eliminate Common Mode Voltage in Multilevel InvertersDokument4 SeitenA Novel Scheme To Eliminate Common Mode Voltage in Multilevel InvertersJavier MaldonadoNoch keine Bewertungen
- Nrjed111211en WebDokument60 SeitenNrjed111211en Webjobpei2Noch keine Bewertungen
- VCB BROCHUREDokument8 SeitenVCB BROCHUREE.ANANDANNoch keine Bewertungen
- VCB Siemens BrochureDokument32 SeitenVCB Siemens BrochureSaurav BhattaraiNoch keine Bewertungen
- ABB MV Switchgear Overview 2009 (NXPowerLite)Dokument50 SeitenABB MV Switchgear Overview 2009 (NXPowerLite)hpham2005100% (1)
- Inversor PVS800-MWS 1 - 2.4 MWDokument4 SeitenInversor PVS800-MWS 1 - 2.4 MWandres gascaNoch keine Bewertungen
- ABB KR 2500kVA Al Conductor - DatasheetDokument1 SeiteABB KR 2500kVA Al Conductor - DatasheetNguyễn Ngọc ChungNoch keine Bewertungen
- Busway SiemensDokument72 SeitenBusway SiemenssnakelostNoch keine Bewertungen
- Cable Bus: Industrial Commercial Utility 600volt, 5KV, 15KV, & Up! 400 To 6000 Amps!Dokument16 SeitenCable Bus: Industrial Commercial Utility 600volt, 5KV, 15KV, & Up! 400 To 6000 Amps!Udhay Shankar100% (1)
- Statcom BrochureDokument12 SeitenStatcom BrochureLê Mạnh HoàNoch keine Bewertungen
- ABB 4028enDokument4 SeitenABB 4028enThangco HutNoch keine Bewertungen
- Motor Protection Principles: Arijit Banerjee, Arvind Tiwari-GE Global Research Jakov Vico, Craig Wester - GE MultilinDokument35 SeitenMotor Protection Principles: Arijit Banerjee, Arvind Tiwari-GE Global Research Jakov Vico, Craig Wester - GE Multilinvaradarajanrengasamy100% (1)
- Ret 615Dokument128 SeitenRet 615thanhnguyen81Noch keine Bewertungen
- Calculation of LCC: System DescriptionDokument7 SeitenCalculation of LCC: System DescriptionJorge MártiresNoch keine Bewertungen
- EcoDial 3.36Dokument92 SeitenEcoDial 3.36tatianaNoch keine Bewertungen
- MCC Enclosure CatalogueDokument12 SeitenMCC Enclosure CatalogueBch Electric ltd100% (1)
- Entrada CA/Mains Input - 220VCA 2F + PE: Diagrama Elétrico SR - 48V/300ADokument1 SeiteEntrada CA/Mains Input - 220VCA 2F + PE: Diagrama Elétrico SR - 48V/300AantonioNoch keine Bewertungen
- Power Survey Form: Pln+Genset Rectifier SystemDokument5 SeitenPower Survey Form: Pln+Genset Rectifier SystemAnton RNoch keine Bewertungen
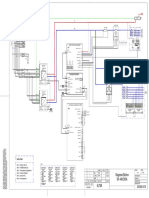
- SLD Abb PWL Dpa 60-80 R Bce TP6Dokument1 SeiteSLD Abb PWL Dpa 60-80 R Bce TP6Farshad MahmoudiNoch keine Bewertungen
- S LV SWG Vip - 00Dokument35 SeitenS LV SWG Vip - 00afsar.erNoch keine Bewertungen
- Power Zone 4 Low Voltage Switchgear PDFDokument6 SeitenPower Zone 4 Low Voltage Switchgear PDFLuis PulidoNoch keine Bewertungen
- Calculation of Altitude CorrectionDokument3 SeitenCalculation of Altitude CorrectionMikami TeruNoch keine Bewertungen
- 11 KV Bay EquipmentDokument22 Seiten11 KV Bay EquipmentSudhir ShindeNoch keine Bewertungen
- Major ProjectDokument30 SeitenMajor ProjectRakesh YadavNoch keine Bewertungen
- Design Grounding TransformersDokument9 SeitenDesign Grounding TransformerscalecaleNoch keine Bewertungen
- Electrical Load List - CompressDokument4 SeitenElectrical Load List - CompressKaiser CarloNoch keine Bewertungen
- Transformer Details ReportDokument1 SeiteTransformer Details Reportwaseem kausarNoch keine Bewertungen
- Quotation MPA HOSTEL (1-3-22)Dokument3 SeitenQuotation MPA HOSTEL (1-3-22)bilalNoch keine Bewertungen
- Electrical Panel Load & Energy Consumption: Main MCCB Size 225 Amp Full Load CurrentDokument6 SeitenElectrical Panel Load & Energy Consumption: Main MCCB Size 225 Amp Full Load CurrentKrisna Bayu AriyantoNoch keine Bewertungen
- Foundation Basis Bearing Simulation Report201906 PDFDokument5 SeitenFoundation Basis Bearing Simulation Report201906 PDFNedyHortetlNoch keine Bewertungen
- 167e EnclrevDokument1 Seite167e EnclrevOrçun GünaydınNoch keine Bewertungen
- ABB PFC ControlerDokument6 SeitenABB PFC ControlermajzdorNoch keine Bewertungen
- Configuration: No. Function ScopeDokument53 SeitenConfiguration: No. Function ScoperahulNoch keine Bewertungen
- Bus Bar Size CalculatorDokument9 SeitenBus Bar Size CalculatorAbdul HafeezNoch keine Bewertungen
- MV Design Guide StandardsDokument9 SeitenMV Design Guide StandardsCristina FerrarNoch keine Bewertungen
- Survey of Model Cap & Needs For Stationary Energy StorageDokument78 SeitenSurvey of Model Cap & Needs For Stationary Energy Storagesara flintNoch keine Bewertungen
- Drawings For MV Switchgear Unigear Zs3.2: Ampliacion Se Sur WSPDokument4 SeitenDrawings For MV Switchgear Unigear Zs3.2: Ampliacion Se Sur WSPfrankrosseliNoch keine Bewertungen
- Air Insulated Indoor SwitchgearDokument6 SeitenAir Insulated Indoor SwitchgearvurumuuNoch keine Bewertungen
- Power Consumption Type A1 RM1448Dokument1 SeitePower Consumption Type A1 RM1448Widda ArifaNoch keine Bewertungen
- Double Ground Fault ProtectionDokument17 SeitenDouble Ground Fault ProtectionAnonymous xBi2FsBxNoch keine Bewertungen
- 03HYUNDAI Intelligent Preventative Diagnostic System (HiPDS)Dokument12 Seiten03HYUNDAI Intelligent Preventative Diagnostic System (HiPDS)juliancansenNoch keine Bewertungen
- MayasandraDokument23 SeitenMayasandrahemarajuNoch keine Bewertungen
- Wind Generator Power Flow Modeling GuideDokument14 SeitenWind Generator Power Flow Modeling Guidekunsridhar8901Noch keine Bewertungen
- OHL AmpacityDokument8 SeitenOHL AmpacityJayabalan R KNoch keine Bewertungen
- 6.6 KV 415 V TransformerDokument9 Seiten6.6 KV 415 V TransformerRohit MukherjeeNoch keine Bewertungen
- Density Based Traffic Light ControllingDokument39 SeitenDensity Based Traffic Light Controllingsantosh426Noch keine Bewertungen
- Ece Mini Project On Embedded Password Based Security Door Lock SystemDokument45 SeitenEce Mini Project On Embedded Password Based Security Door Lock SystemJaymin Patel100% (4)
- Ece Mini Project On Embedded Password Based Security Door Lock SystemDokument45 SeitenEce Mini Project On Embedded Password Based Security Door Lock Systemvalgin100% (2)
- Traffic Light Priority Control For Emergency VehiclesDokument36 SeitenTraffic Light Priority Control For Emergency VehiclesYogesh AsatiNoch keine Bewertungen
- Wireles S Home Security System: R.N. Modi Engineering College, KotaDokument17 SeitenWireles S Home Security System: R.N. Modi Engineering College, KotaUtkarsh BhaskarNoch keine Bewertungen
- Non-Conventional Energy: Fuel Cells (Fuel For The Future Energy)Dokument11 SeitenNon-Conventional Energy: Fuel Cells (Fuel For The Future Energy)upender_kalwaNoch keine Bewertungen
- 6.034 Quiz 1, Spring 2005: 1 Search Algorithms (16 Points)Dokument14 Seiten6.034 Quiz 1, Spring 2005: 1 Search Algorithms (16 Points)upender_kalwaNoch keine Bewertungen
- Artificial Intelligence - Quiz1 Review SolDokument25 SeitenArtificial Intelligence - Quiz1 Review Solupender_kalwaNoch keine Bewertungen
- Artificial Intelligence - Learning at GlanceDokument1 SeiteArtificial Intelligence - Learning at Glanceupender_kalwaNoch keine Bewertungen
- 6.034 Design Assignment 2: 1 Data SetsDokument6 Seiten6.034 Design Assignment 2: 1 Data Setsupender_kalwaNoch keine Bewertungen
- Formulating Search ProblemsDokument11 SeitenFormulating Search Problemsupender_kalwaNoch keine Bewertungen
- Artificial Intelligence - ch10 - Logic2bDokument28 SeitenArtificial Intelligence - ch10 - Logic2bupender_kalwaNoch keine Bewertungen
- 6.034 Notes: Section 7.1: Slide 7.1.1Dokument25 Seiten6.034 Notes: Section 7.1: Slide 7.1.1upender_kalwaNoch keine Bewertungen
- 6.034 Notes: Section 8.1: Slide 8.1.1Dokument31 Seiten6.034 Notes: Section 8.1: Slide 8.1.1upender_kalwaNoch keine Bewertungen
- 6.034 Notes: Section 9.1: Slide 9.1.1Dokument26 Seiten6.034 Notes: Section 9.1: Slide 9.1.1upender_kalwaNoch keine Bewertungen
- 6.034 Notes: Section 1.1: Slide 1.1.1Dokument5 Seiten6.034 Notes: Section 1.1: Slide 1.1.1upender_kalwaNoch keine Bewertungen
- 6.034 Notes: Section 5.1: Slide 5.1.1Dokument22 Seiten6.034 Notes: Section 5.1: Slide 5.1.1upender_kalwaNoch keine Bewertungen
- 6.034 Notes: Section 4.1: Slide 4.1.1Dokument34 Seiten6.034 Notes: Section 4.1: Slide 4.1.1upender_kalwaNoch keine Bewertungen
- Curriculum Vitae: Mobile No: +917019900128 E-MailDokument5 SeitenCurriculum Vitae: Mobile No: +917019900128 E-MailJay MNoch keine Bewertungen
- Essay Writing TipsDokument4 SeitenEssay Writing TipsSubhasish MitraNoch keine Bewertungen
- English Paper 1 Mark Scheme: Cambridge Lower Secondary Sample Test For Use With Curriculum Published in September 2020Dokument11 SeitenEnglish Paper 1 Mark Scheme: Cambridge Lower Secondary Sample Test For Use With Curriculum Published in September 2020ABEER RATHINoch keine Bewertungen
- FM Assignment 17-M-518 MMM - Eicher MotorDokument33 SeitenFM Assignment 17-M-518 MMM - Eicher MotorTrilokNoch keine Bewertungen
- Assignment 1 SolutionDokument11 SeitenAssignment 1 SolutionKash TorabiNoch keine Bewertungen
- APA 6th Edition - Citation Styles APA, MLA, Chicago, Turabian, IEEE - LibGuDokument2 SeitenAPA 6th Edition - Citation Styles APA, MLA, Chicago, Turabian, IEEE - LibGuJan Louis SalazarNoch keine Bewertungen
- Checkpoints Before Transformer InstallationDokument3 SeitenCheckpoints Before Transformer InstallationBeaBustosNoch keine Bewertungen
- Ssg-Ng01012401-Gen-Aa-5880-00012 - C01 - Ssags Nigerian Content PlanDokument24 SeitenSsg-Ng01012401-Gen-Aa-5880-00012 - C01 - Ssags Nigerian Content PlanStroom Limited100% (2)
- Resume Of: Name: Kingshuk Saha Address: Mobile: E-MailDokument2 SeitenResume Of: Name: Kingshuk Saha Address: Mobile: E-MailKingshuk Saha PalasNoch keine Bewertungen
- Plastics Library 2016 enDokument32 SeitenPlastics Library 2016 enjoantanamal tanamaNoch keine Bewertungen
- Pipe Support Reference 8-29-14Dokument108 SeitenPipe Support Reference 8-29-14HITESHNoch keine Bewertungen
- Mrs. Saba Khan 15 Shahbad Diwan Khana, Bareilly, City, Bareilly, Bareilly, Utt AR PRADESH, 243003,9219172265Dokument28 SeitenMrs. Saba Khan 15 Shahbad Diwan Khana, Bareilly, City, Bareilly, Bareilly, Utt AR PRADESH, 243003,9219172265amitNoch keine Bewertungen
- Linear Analysis of Concrete Frames Considering Joint FlexibilityDokument16 SeitenLinear Analysis of Concrete Frames Considering Joint FlexibilityluffiM13Noch keine Bewertungen
- Exercise On Coordination and ResponseDokument8 SeitenExercise On Coordination and ResponseNorliyana AliNoch keine Bewertungen
- Ebook Essentials of Kumar Clarks Clinical Medicine PDF Full Chapter PDFDokument67 SeitenEbook Essentials of Kumar Clarks Clinical Medicine PDF Full Chapter PDFjanet.cochran431100% (19)
- Tes - 29 October 2021 UserUploadNetDokument120 SeitenTes - 29 October 2021 UserUploadNetTran Nhat QuangNoch keine Bewertungen
- Ponce vs. Court of AppealsDokument7 SeitenPonce vs. Court of AppealsMp CasNoch keine Bewertungen
- Focus GroupDokument20 SeitenFocus GroupItzel H. ArmentaNoch keine Bewertungen
- Issues in Corporate GovernanceDokument15 SeitenIssues in Corporate GovernanceVandana ŘwţNoch keine Bewertungen
- American J Political Sci - 2023 - Eggers - Placebo Tests For Causal InferenceDokument16 SeitenAmerican J Political Sci - 2023 - Eggers - Placebo Tests For Causal Inferencemarta bernardiNoch keine Bewertungen
- LoratadinaDokument3 SeitenLoratadinapapaindoNoch keine Bewertungen
- PS-8955 Zinc Alloy ElectrodepositedDokument8 SeitenPS-8955 Zinc Alloy ElectrodepositedArturo Palacios100% (1)
- The Secret of Forgiveness of Sin and Being Born Again by Pastor Ock Soo Park 8985422367Dokument5 SeitenThe Secret of Forgiveness of Sin and Being Born Again by Pastor Ock Soo Park 8985422367Justinn AbrahamNoch keine Bewertungen
- Augusta Issue 1145 - The Jail ReportDokument24 SeitenAugusta Issue 1145 - The Jail ReportGreg RickabaughNoch keine Bewertungen
- 3.3 (B) Mole N MassDokument20 Seiten3.3 (B) Mole N MassFidree AzizNoch keine Bewertungen
- Subordination, Non - Disturbance and Attornment AgreementDokument7 SeitenSubordination, Non - Disturbance and Attornment AgreementDavid CromwellNoch keine Bewertungen
- A-Health Advance - Application Form With InstructionsDokument14 SeitenA-Health Advance - Application Form With InstructionsExsan OthmanNoch keine Bewertungen
- 2008 IASS SLTE 2008 Chi Pauletti PDFDokument10 Seiten2008 IASS SLTE 2008 Chi Pauletti PDFammarNoch keine Bewertungen
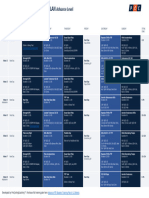
- FTP Booster Training Plan OverviewDokument1 SeiteFTP Booster Training Plan Overviewwiligton oswaldo uribe rodriguezNoch keine Bewertungen
- Authority To TravelDokument39 SeitenAuthority To TraveljoraldNoch keine Bewertungen