Das könnte Ihnen auch gefallen
- Pasteleria ColombianaDokument13 SeitenPasteleria ColombianaNenita Heyi VargasNoch keine Bewertungen
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalVon EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalBewertung: 5 von 5 Sternen5/5 (4)
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Von EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Noch keine Bewertungen
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Von EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Noch keine Bewertungen
- Guia Ejercicios Calculo de ProtecccionesDokument2 SeitenGuia Ejercicios Calculo de Protecccionescristian astudilloNoch keine Bewertungen
- Tarea 01 de Circuitos Digitales Ii 2016-1 (Unmsm)Dokument8 SeitenTarea 01 de Circuitos Digitales Ii 2016-1 (Unmsm)Leo J Rojas RomeroNoch keine Bewertungen
- Gran Turismo 5Dokument36 SeitenGran Turismo 5eoyjulioeoy100% (3)
- Pre Informe 2Dokument7 SeitenPre Informe 2Javier E. GutierrezNoch keine Bewertungen
- Limitadores y MultiplicadoresDokument6 SeitenLimitadores y MultiplicadoresMarjo RiveNoch keine Bewertungen
- Practica 11Dokument2 SeitenPractica 11Marcial Jr ChavezNoch keine Bewertungen
- Universidad Nacional Mayor de San Marcos: Facultad de Ingeniería de Electrónica Y EléctricaDokument64 SeitenUniversidad Nacional Mayor de San Marcos: Facultad de Ingeniería de Electrónica Y EléctricaYOSSUE MANUEL JUNIOR PADILLA HUAMANNoch keine Bewertungen
- G.a.3 Aplicaciones en AC Con DiodosDokument17 SeitenG.a.3 Aplicaciones en AC Con DiodosHarry ZaldañaNoch keine Bewertungen
- Practica Electronica 2 Pot Bas. UjtDokument15 SeitenPractica Electronica 2 Pot Bas. UjtantonioNoch keine Bewertungen
- Cuestionario 2Dokument9 SeitenCuestionario 2AntonioLinkEzeroNoch keine Bewertungen
- Trabajo 1Dokument2 SeitenTrabajo 1Martin Carrasco TalaveraNoch keine Bewertungen
- Cuestionario Previo 4 Lita SotoDokument10 SeitenCuestionario Previo 4 Lita SotoRuth Maria Tapia AguilarNoch keine Bewertungen
- Diseño de Circuitos y Sistemas Electrónicos Enrique J. DedeDokument3 SeitenDiseño de Circuitos y Sistemas Electrónicos Enrique J. DedeWilliam Fernando Patiño CalderonNoch keine Bewertungen
- Labo-Electronica 0 BetaDokument7 SeitenLabo-Electronica 0 BetaLuis Alva FuertesNoch keine Bewertungen
- Grupo 3 Laboratorio de Circuitos 2 Primer LaboratorioDokument23 SeitenGrupo 3 Laboratorio de Circuitos 2 Primer LaboratorioALberto Tarazona ValverdeNoch keine Bewertungen
- Lab 1 de Ce II-medic en AcDokument8 SeitenLab 1 de Ce II-medic en AcRodolfo León CastilloNoch keine Bewertungen
- Resonancia en Circuitos R-L-C en ParaleloDokument22 SeitenResonancia en Circuitos R-L-C en ParaleloRoky RbrNoch keine Bewertungen
- Previo1 Elec. Potencia TeresaDokument7 SeitenPrevio1 Elec. Potencia TeresaAngelGuerreroNoch keine Bewertungen
- Cuestionario Cap 1 2 3 4 OkDokument20 SeitenCuestionario Cap 1 2 3 4 OkjojojNoch keine Bewertungen
- Jiménez 2017079514Dokument3 SeitenJiménez 2017079514Javier Jimnez FonsecaNoch keine Bewertungen
- Relaciones Escalares y Complejas en Circuitos Electricos LinealesDokument10 SeitenRelaciones Escalares y Complejas en Circuitos Electricos LinealesJhon Alex López SotoNoch keine Bewertungen
- AstromKumarControlPerspective2014 en EsDokument41 SeitenAstromKumarControlPerspective2014 en EsNico Politos100% (1)
- Laboratorio Semana 2 - Sistemas de Numeracion SolucionDokument6 SeitenLaboratorio Semana 2 - Sistemas de Numeracion SolucionDJ WozNoch keine Bewertungen
- Laboratorio #03 Circuitos ElectricosDokument14 SeitenLaboratorio #03 Circuitos ElectricosNick DipeNoch keine Bewertungen
- Wuolah Free Hoja de Ejercicios Del Tema 2Dokument26 SeitenWuolah Free Hoja de Ejercicios Del Tema 2SofiNoch keine Bewertungen
- Corriente Eléctrica, Potencial y ResistividadDokument3 SeitenCorriente Eléctrica, Potencial y ResistividadjoelNoch keine Bewertungen
- Uni-Fiee Sistemas Digitales I CICLO 2020-1 EE-635 M-N Quinto LaboratorioDokument3 SeitenUni-Fiee Sistemas Digitales I CICLO 2020-1 EE-635 M-N Quinto LaboratorioAlfred PILLACA GOMEZNoch keine Bewertungen
- Relaciones Escalares y Complejas en Circuitos Electricos LinealesDokument10 SeitenRelaciones Escalares y Complejas en Circuitos Electricos LinealesJhon Alex López SotoNoch keine Bewertungen
- Desarrollo de Un Control para Un Ascensor de 2 NivelesDokument2 SeitenDesarrollo de Un Control para Un Ascensor de 2 NivelesMrc MaurNoch keine Bewertungen
- Informe Final N°9 - Grupo 04Dokument8 SeitenInforme Final N°9 - Grupo 04EDGAR SOLISNoch keine Bewertungen
- Procedimiento y Cuestionario 1,2,3 y 4Dokument12 SeitenProcedimiento y Cuestionario 1,2,3 y 4Sandra Mirella Toribio RodriguezNoch keine Bewertungen
- Informe Final2-Electronicos 1Dokument10 SeitenInforme Final2-Electronicos 1Jhonatan Juño GarciaNoch keine Bewertungen
- Butler Blaker - TESIS - 2018 PDFDokument175 SeitenButler Blaker - TESIS - 2018 PDFMaya Encarnación QuirozNoch keine Bewertungen
- Amplificador OpticoDokument6 SeitenAmplificador OpticoKarla Alegria JiménezNoch keine Bewertungen
- Laboratorio n5 - 11190120 - Pedro Calixtro SotoDokument14 SeitenLaboratorio n5 - 11190120 - Pedro Calixtro SotoPedro Calixtro SotoNoch keine Bewertungen
- Toolbox de RobóticaDokument8 SeitenToolbox de RobóticaSergio SorucoNoch keine Bewertungen
- Respuesta en Alta Frecuencia FinalDokument6 SeitenRespuesta en Alta Frecuencia FinalandreaNoch keine Bewertungen
- Ejercicios de Unidad 1Dokument19 SeitenEjercicios de Unidad 1Bruno CastillejosNoch keine Bewertungen
- Previo 8Dokument9 SeitenPrevio 8Christian Angulo MamaniNoch keine Bewertungen
- FINAL 6 MAQUINAS ELECTRICAS CollazosDokument4 SeitenFINAL 6 MAQUINAS ELECTRICAS CollazosAlexis Cueva GNoch keine Bewertungen
- Ley de OHM, kIRCHOFF, Mallas y NodosDokument24 SeitenLey de OHM, kIRCHOFF, Mallas y NodosAlejandro Castro100% (2)
- 001 Exp. 7 El Amplificador de Emisor ComúnDokument3 Seiten001 Exp. 7 El Amplificador de Emisor ComúnERICK ADONIS ANAYA FLORESNoch keine Bewertungen
- Laboratorio de Circuitos Informe Lab 5Dokument19 SeitenLaboratorio de Circuitos Informe Lab 5GatoBeckerNoch keine Bewertungen
- IF 4 Laboratorio de Circuitos Electricos I FIEE UNIDokument11 SeitenIF 4 Laboratorio de Circuitos Electricos I FIEE UNIJason SuxeNoch keine Bewertungen
- Previo 8 Electricos 2Dokument5 SeitenPrevio 8 Electricos 2Servigetel EmpresaNoch keine Bewertungen
- Laboratorio 02 Respuesta en Frecuencia Del Amplificador en Emisor Común PDFDokument9 SeitenLaboratorio 02 Respuesta en Frecuencia Del Amplificador en Emisor Común PDFOrlando Bustamante FernandezNoch keine Bewertungen
- Informe 1Dokument17 SeitenInforme 1Jhon Cerna F.Noch keine Bewertungen
- Medicion Del Coeficiente de Acoplamiento yDokument7 SeitenMedicion Del Coeficiente de Acoplamiento yCesar Padilla Sandoval100% (1)
- Informe Final 2 Amplificador DiferencialDokument22 SeitenInforme Final 2 Amplificador DiferencialChris M. Vilchez Jesus100% (3)
- 3er Laboratorio Electronica Filtro LCDokument10 Seiten3er Laboratorio Electronica Filtro LCCoNoch keine Bewertungen
- Rectificadores OndaDokument8 SeitenRectificadores OndaCindy TatianaNoch keine Bewertungen
- Lab. Maquians Electricas 1Dokument10 SeitenLab. Maquians Electricas 1Nicolas LozadaNoch keine Bewertungen
- Guia 3Dokument9 SeitenGuia 3Vilcazan Huayta JuanNoch keine Bewertungen
- Electrotecnia Experiencia 8Dokument4 SeitenElectrotecnia Experiencia 8Romario Carhuaricra DuranNoch keine Bewertungen
- Reporte 6 - Lab Electrónica II-2Dokument15 SeitenReporte 6 - Lab Electrónica II-2davidcder90Noch keine Bewertungen
- Ejercicios Transformada PDFDokument3 SeitenEjercicios Transformada PDFNataNoch keine Bewertungen
- Problemario Unidad V Clases VirtualesDokument2 SeitenProblemario Unidad V Clases VirtualesAbdon Marquez EfrenNoch keine Bewertungen
- Robot Balanceado Sobre Sus Ruedas TEORÍA DE CONTROL 2Dokument25 SeitenRobot Balanceado Sobre Sus Ruedas TEORÍA DE CONTROL 2Byron Pinguil SánchezNoch keine Bewertungen
- Control en Lazo Cerrado de La Posicion Angular de Motores de CD PDFDokument7 SeitenControl en Lazo Cerrado de La Posicion Angular de Motores de CD PDFFredyx Hernández StrokeNoch keine Bewertungen
- Manual para Maquina VirtualDokument41 SeitenManual para Maquina VirtualYesi M. DiazNoch keine Bewertungen
- Ruta CriticaDokument47 SeitenRuta CriticaJohn Fredy Calderon GarciaNoch keine Bewertungen
- Actividad 2 ÉticaDokument4 SeitenActividad 2 ÉticaMelina9393Noch keine Bewertungen
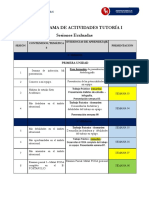
- Cronograma de Actividades Tutoría IDokument2 SeitenCronograma de Actividades Tutoría IYennifer Venicia Peralta PalaciosNoch keine Bewertungen
- Resolucion FraccionesDokument4 SeitenResolucion FraccionesChristopher BlakeNoch keine Bewertungen
- Practica 1 LDRDokument7 SeitenPractica 1 LDRNava AylinNoch keine Bewertungen
- Movimiento Rectilineo Uniforme-Mruv-Lanzamiento VerticalDokument31 SeitenMovimiento Rectilineo Uniforme-Mruv-Lanzamiento VerticalAlberto Bailon QuijijeNoch keine Bewertungen
- Ficha de Trabajo 02 5to Año - Diseñando e Imprimiendo Un Boleto Numerado para Un Evento FamiliarDokument5 SeitenFicha de Trabajo 02 5to Año - Diseñando e Imprimiendo Un Boleto Numerado para Un Evento FamiliarGloria María Cortez VillanuevaNoch keine Bewertungen
- Ejercicio 1 Del Conflicto Al Problema TécnicoDokument7 SeitenEjercicio 1 Del Conflicto Al Problema TécnicoLuis CoronaNoch keine Bewertungen
- 3.3 Ejercicios Competencia Perfecta PDFDokument2 Seiten3.3 Ejercicios Competencia Perfecta PDFHERBERT DAVID DELGADO FLORIANNoch keine Bewertungen
- Aplicaciones de Funciones Exponenciales en EconomíaDokument12 SeitenAplicaciones de Funciones Exponenciales en EconomíaPorras Marquina YarkNoch keine Bewertungen
- Guia NoDokument1 SeiteGuia Noapi-3738915100% (1)
- soluciónGFA-211 TAREA TERCER PARCIALDokument9 SeitensoluciónGFA-211 TAREA TERCER PARCIALmontse venturaNoch keine Bewertungen
- Acta de Representación Del MunicipioDokument1 SeiteActa de Representación Del MunicipioDIEGO ALFONSO DIAZ RODRIGUEZNoch keine Bewertungen
- Guía de Control EstadísticoDokument5 SeitenGuía de Control EstadísticoTosta LarryNoch keine Bewertungen
- Recepcion Harina de SoyaDokument3 SeitenRecepcion Harina de Soyaedwin alvaradoNoch keine Bewertungen
- Actividad 7 Transferencias TerritorialesDokument13 SeitenActividad 7 Transferencias TerritorialesSantiago Molina MatomaNoch keine Bewertungen
- WH674U Monitor Manual v1Dokument43 SeitenWH674U Monitor Manual v1Try on Haul GirlsNoch keine Bewertungen
- Aguas Acidas en MineriaDokument22 SeitenAguas Acidas en MineriaTerrones DE Azucar100% (1)
- Simulador BCPSIO II Ejercicio 2Dokument2 SeitenSimulador BCPSIO II Ejercicio 2elisa brigidaNoch keine Bewertungen
- 02 Ejercicio Riesgo de LiquidezDokument4 Seiten02 Ejercicio Riesgo de LiquidezGuillermo Jose MansillaNoch keine Bewertungen
- Plantilla Modelo de Propuestas de Narracion Digital para Su Uso en El AulaDokument8 SeitenPlantilla Modelo de Propuestas de Narracion Digital para Su Uso en El AulaCarmen Salas Del RíoNoch keine Bewertungen
- DJ Cambio de Prestador Asistencial v2Dokument2 SeitenDJ Cambio de Prestador Asistencial v2Romina SparanoNoch keine Bewertungen
- Estadística Descriptiva (Solo Hay Histogramas y Valor Esperado, FaltaDokument8 SeitenEstadística Descriptiva (Solo Hay Histogramas y Valor Esperado, FaltaSarita Janeth Maza SilvaNoch keine Bewertungen
- UNALM BI Analytics-BigData-Sesion IntroductoriaDokument39 SeitenUNALM BI Analytics-BigData-Sesion IntroductoriaANthony TomastoNoch keine Bewertungen
- E-COMMERCE Actividad Eje 2Dokument6 SeitenE-COMMERCE Actividad Eje 2Margarita Camargo BecerraNoch keine Bewertungen