Das könnte Ihnen auch gefallen
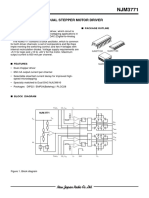
- Dual Stepper Motor Driver: General Description Package OutlineDokument9 SeitenDual Stepper Motor Driver: General Description Package OutlinesilictronicNoch keine Bewertungen
- NJM3770A: Stepper Motor DriverDokument10 SeitenNJM3770A: Stepper Motor DriverDmitryNoch keine Bewertungen
- Microcontroller circuit with USB interfaceDokument1 SeiteMicrocontroller circuit with USB interfaceWagner Gómez100% (1)
- Atmega328 Based Circuit Diagram of The ProjectDokument1 SeiteAtmega328 Based Circuit Diagram of The ProjectKav Mav100% (2)
- Rys 8833Dokument12 SeitenRys 8833Kherbiche YounesNoch keine Bewertungen
- Schematic - POWER BANKDokument1 SeiteSchematic - POWER BANKUjang Priyanto100% (1)
- Dual Differential Comparators: Features DescriptionDokument29 SeitenDual Differential Comparators: Features Descriptionalllim88Noch keine Bewertungen
- TWDB SchematicDokument1 SeiteTWDB Schematicpm6041141100% (1)
- U1A LME49720 J3 +/-12 V IN: Title: in Hi-ZDokument1 SeiteU1A LME49720 J3 +/-12 V IN: Title: in Hi-ZArmando CedeñoNoch keine Bewertungen
- 555 A4988 SCHDokument1 Seite555 A4988 SCHionut8312Noch keine Bewertungen
- LM358 DatasheetDokument34 SeitenLM358 DatasheetMai EsamNoch keine Bewertungen
- Mesa Boogie Dual Rectifier 2 Channel Preamp Emulator: Circuit by Trueval, PCB Layout by TemolDokument7 SeitenMesa Boogie Dual Rectifier 2 Channel Preamp Emulator: Circuit by Trueval, PCB Layout by TemolСергей АндрияновNoch keine Bewertungen
- LayoutDokument1 SeiteLayoutajib_orangeNoch keine Bewertungen
- Belimo - P-22RT - 1U00 - Installation-InstructionDokument2 SeitenBelimo - P-22RT - 1U00 - Installation-InstructionAslam Abd AzizNoch keine Bewertungen
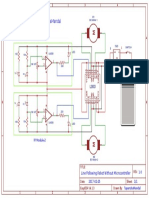
- Schematic Line Following Robot Line Following Robot Without MicrocontrollerDokument1 SeiteSchematic Line Following Robot Line Following Robot Without Microcontrollerwibowoari100% (1)
- Pid DemoDokument1 SeitePid Demolxz5101100% (1)
- 74 HC 20Dokument20 Seiten74 HC 20Ezequiel AriasNoch keine Bewertungen
- Dual Operational Amplifiers: Features DescriptionDokument34 SeitenDual Operational Amplifiers: Features DescriptionMario Sernaque RumicheNoch keine Bewertungen
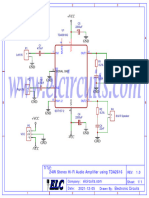
- Schematic - 24W Stereo Hi-Fi Audio Amplifier Using TDA2616 + PCB - 2021Dokument1 SeiteSchematic - 24W Stereo Hi-Fi Audio Amplifier Using TDA2616 + PCB - 2021Antonieta Cano CruzNoch keine Bewertungen
- GPS1.0 SCHDokument1 SeiteGPS1.0 SCHMukhiturrusda100% (2)
- Ir2153 Inversor EsquemaDokument1 SeiteIr2153 Inversor EsquemaLuisa AmbrosNoch keine Bewertungen
- AudioAnalyzerV2.0Dokument1 SeiteAudioAnalyzerV2.0joxNoch keine Bewertungen
- Sky65171-11: 1930 - 1990 MHZ, 0.5 W High Power Power AmplifierDokument10 SeitenSky65171-11: 1930 - 1990 MHZ, 0.5 W High Power Power AmplifiercopslockNoch keine Bewertungen
- IC2 JP3 9V V+: 10/19/2023 9:18 PM C:/Users/ASUS/Downloads/sams/08 - Samsul Ma'arif - Percobaan 1.sch (Sheet: 1/1)Dokument5 SeitenIC2 JP3 9V V+: 10/19/2023 9:18 PM C:/Users/ASUS/Downloads/sams/08 - Samsul Ma'arif - Percobaan 1.sch (Sheet: 1/1)dionsamsul765Noch keine Bewertungen
- U1 P-LDR H-I2C Power: LCD - Sda LCD - SCLDokument1 SeiteU1 P-LDR H-I2C Power: LCD - Sda LCD - SCLTrần Hoàng100% (1)
- DOC001036114Dokument1 SeiteDOC001036114Luis JimenezNoch keine Bewertungen
- Schematic - AVR Colour LCD Tester - LCR TC1 - 20180912214500 PDFDokument1 SeiteSchematic - AVR Colour LCD Tester - LCR TC1 - 20180912214500 PDFanshumantech anshumantech0% (1)
- PR11 Schematic V2Dokument1 SeitePR11 Schematic V2siti syahirah100% (1)
- Schematic New Sentinel 2024-02-16Dokument1 SeiteSchematic New Sentinel 2024-02-16Khánh TrịnhNoch keine Bewertungen
- Schematic - MP2639 Lithium Charging and Discharging - 2020-05-15 - 14-29-38Dokument1 SeiteSchematic - MP2639 Lithium Charging and Discharging - 2020-05-15 - 14-29-38Colin HwangNoch keine Bewertungen
- Schematic - Shield Arduino - 2023-05-08 PDFDokument1 SeiteSchematic - Shield Arduino - 2023-05-08 PDFLeonardo PérezNoch keine Bewertungen
- HHO GeneratorDokument1 SeiteHHO GeneratorHong Quan Hoang100% (1)
- SURE DB-DP11112 - SCH-розблокованоDokument4 SeitenSURE DB-DP11112 - SCH-розблокованоВиталий БеспаловNoch keine Bewertungen
- Schematic Gerador 2022-04-09Dokument1 SeiteSchematic Gerador 2022-04-09Карлос ГорбачNoch keine Bewertungen
- Schematic Hand+Gesture+Car+Tx 2021-04-17Dokument1 SeiteSchematic Hand+Gesture+Car+Tx 2021-04-17ahmed mediaNoch keine Bewertungen
- Waveshare Sound Sensor SchematicDokument1 SeiteWaveshare Sound Sensor SchematicNishant Kumar KashyapNoch keine Bewertungen
- Miniaturowy Zasilacz 3,3 I 5 VDokument2 SeitenMiniaturowy Zasilacz 3,3 I 5 VZygmunt SzaryNoch keine Bewertungen
- Schematic LiPoChargeProtectBoost-copy LiPoChargeProtectBoost 20190522130354Dokument1 SeiteSchematic LiPoChargeProtectBoost-copy LiPoChargeProtectBoost 20190522130354Sandra MarkivNoch keine Bewertungen
- Schematic - Zigbee Stick 4.0 CH340CDokument1 SeiteSchematic - Zigbee Stick 4.0 CH340CSergey SuloevNoch keine Bewertungen
- Osoyoo Balance Car Robot DigramDokument1 SeiteOsoyoo Balance Car Robot DigramSW100% (1)
- SS4H-SD Schematic v. 1.1Dokument1 SeiteSS4H-SD Schematic v. 1.1gigioNoch keine Bewertungen
- Arduino Stepper Motor Control CircuitDokument1 SeiteArduino Stepper Motor Control CircuitLivake BukNoch keine Bewertungen
- Subbu DAC SE V3 SchematicsDokument1 SeiteSubbu DAC SE V3 Schematicscristi289Noch keine Bewertungen
- Schematic PDF - (No Variations)Dokument1 SeiteSchematic PDF - (No Variations)Mayank chauhanNoch keine Bewertungen
- Schematic PrintsDokument1 SeiteSchematic Printsthong lyNoch keine Bewertungen
- Schematic - Ticari Sistem - 2022-11-14Dokument1 SeiteSchematic - Ticari Sistem - 2022-11-14Tuna ÖzerNoch keine Bewertungen
- ss4h-sd SchematicDokument1 Seitess4h-sd Schematic003454Noch keine Bewertungen
- D D D D D D D D D D D: LM193, LM293, LM293A, LM393 LM393A, LM2903, LM2903Q Dual Differential ComparatorsDokument12 SeitenD D D D D D D D D D D: LM193, LM293, LM293A, LM393 LM393A, LM2903, LM2903Q Dual Differential Comparatorsalllim88Noch keine Bewertungen
- Schematic LLM393Dokument1 SeiteSchematic LLM393Channa PrasadNoch keine Bewertungen
- LM2901, LM339/LM339A, LM3302 LM239/LM239A: Quad ComparatorDokument8 SeitenLM2901, LM339/LM339A, LM3302 LM239/LM239A: Quad ComparatorWellison RodriguesNoch keine Bewertungen
- Dig Is Park SchematicDokument1 SeiteDig Is Park SchematicNoor HadiNoch keine Bewertungen
- DGFFGDokument1 SeiteDGFFGSachin RathoreNoch keine Bewertungen
- IRF9540 MOSFET circuit diagramDokument1 SeiteIRF9540 MOSFET circuit diagramFran CortesNoch keine Bewertungen
- SCH PDFDokument1 SeiteSCH PDFcharanNoch keine Bewertungen
- 22/02/2019 8:32:08 CH C:/Users/Phamhung/Documents/Eagle/Pwm Charge/Untitled - SCH (Sheet: 1/1)Dokument1 Seite22/02/2019 8:32:08 CH C:/Users/Phamhung/Documents/Eagle/Pwm Charge/Untitled - SCH (Sheet: 1/1)Fran CortesNoch keine Bewertungen
- Schematic - Heart Attack Prevention System - 2023!06!24Dokument1 SeiteSchematic - Heart Attack Prevention System - 2023!06!24Sagnik BhowmikNoch keine Bewertungen
- Sky65170-11: 860 - 900 MHZ, 0.5 W High Power Power AmplifierDokument10 SeitenSky65170-11: 860 - 900 MHZ, 0.5 W High Power Power AmplifiercopslockNoch keine Bewertungen
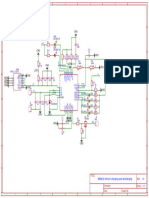
- BMS26M833 SchematicDokument1 SeiteBMS26M833 Schematicdbu746462945Noch keine Bewertungen
- Schematic - LM358 AKÜ ŞARJ DEVRESİ - 2021-10-18Dokument1 SeiteSchematic - LM358 AKÜ ŞARJ DEVRESİ - 2021-10-18Med SamiNoch keine Bewertungen
- Groebert Automatic - Identification.of - Cryptographic.primitives - In.softwareDokument115 SeitenGroebert Automatic - Identification.of - Cryptographic.primitives - In.softwareassimilatNoch keine Bewertungen
- Buildroot WorkshopDokument43 SeitenBuildroot WorkshopassimilatNoch keine Bewertungen
- 802 7085 10Dokument180 Seiten802 7085 10assimilatNoch keine Bewertungen
- Philips CCB130Dokument147 SeitenPhilips CCB130assimilatNoch keine Bewertungen
- Ncurses Programming HowtoDokument100 SeitenNcurses Programming HowtoLinuxman RjNoch keine Bewertungen
- Black OxideDokument1 SeiteBlack OxideassimilatNoch keine Bewertungen