Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Me-1 To 10 Gf-PodiumDokument10 SeitenMe-1 To 10 Gf-PodiumKristina OrmacidoNoch keine Bewertungen
- Productdata 1LDokument23 SeitenProductdata 1Lsharif_alNoch keine Bewertungen
- Design Report of Diesel Engine, Air Cooled (15Kw)Dokument26 SeitenDesign Report of Diesel Engine, Air Cooled (15Kw)Roshan ShajuNoch keine Bewertungen
- Difference BW LBF and LBDokument3 SeitenDifference BW LBF and LBbshahidhNoch keine Bewertungen
- Gear Group (Front) - Install - Idler Gear Only: Desmontagem e MontagemDokument6 SeitenGear Group (Front) - Install - Idler Gear Only: Desmontagem e MontagemJose nildo lobato Mendes MendesNoch keine Bewertungen
- LHB Monograph PDFDokument60 SeitenLHB Monograph PDFVijay Ranjan KumarNoch keine Bewertungen
- Branch Name B.E. Aeronautical Engineering: Semes Ter Subject Name Subject Code Exam Date SessionDokument99 SeitenBranch Name B.E. Aeronautical Engineering: Semes Ter Subject Name Subject Code Exam Date SessionCoding HintsNoch keine Bewertungen
- Control Cables PDFDokument28 SeitenControl Cables PDFPandurang NalawadeNoch keine Bewertungen
- BOM for 11 kV VCB truck assembly componentsDokument3 SeitenBOM for 11 kV VCB truck assembly componentsTawhidul IslamNoch keine Bewertungen
- Hyperbolic ShellsDokument42 SeitenHyperbolic ShellshythamNoch keine Bewertungen
- 079254C 1g00u01 Iso CSW 1g00civ007 0001 - 0Dokument1 Seite079254C 1g00u01 Iso CSW 1g00civ007 0001 - 0Mahmoud HassanNoch keine Bewertungen
- Modeling Cracked Behavior of Shear Walls in ETABSDokument2 SeitenModeling Cracked Behavior of Shear Walls in ETABSjadlouis100% (3)
- Manual Awp Le Blanc Pag. 147Dokument231 SeitenManual Awp Le Blanc Pag. 147Ruben Alejandro Yam PechNoch keine Bewertungen
- Super Aero City CNG Bus: Owner'S Manual Operation Maintenance SpecificationsDokument208 SeitenSuper Aero City CNG Bus: Owner'S Manual Operation Maintenance SpecificationsHuu NguyenNoch keine Bewertungen
- Chapter 3Dokument17 SeitenChapter 3Mintesnot TadeleNoch keine Bewertungen
- Kirloskar SP 3HH Leaflet (A)Dokument2 SeitenKirloskar SP 3HH Leaflet (A)Imran_firdousiNoch keine Bewertungen
- Fassi Crane: Use and MaintenanceDokument79 SeitenFassi Crane: Use and Maintenancesanvae123Noch keine Bewertungen
- Solar Water Heaters Guidelines V1 Aug 2019Dokument49 SeitenSolar Water Heaters Guidelines V1 Aug 2019Mile DjordjevicNoch keine Bewertungen
- Chapter 2Dokument35 SeitenChapter 2Eba GetachewNoch keine Bewertungen
- Thermodynamics 2 Module #2 Rankine CycleDokument19 SeitenThermodynamics 2 Module #2 Rankine CycleJohn Rexel CaroNoch keine Bewertungen
- ACD THESIS FINALE No.4 1Dokument74 SeitenACD THESIS FINALE No.4 1Datu JonathanNoch keine Bewertungen
- Blowoff ExplanationDokument5 SeitenBlowoff ExplanationPablo SanciminoNoch keine Bewertungen
- Laws of Floatation ExplainedDokument2 SeitenLaws of Floatation Explainedtarak dasNoch keine Bewertungen
- API-653 Now Permits Lap-Welded Patch Plates For Shell Repairs - Carmagen EngineeringDokument2 SeitenAPI-653 Now Permits Lap-Welded Patch Plates For Shell Repairs - Carmagen Engineeringmohsen_267100% (1)
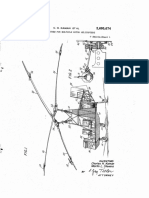
- 1950 Kaman Servoflap US2695674Dokument23 Seiten1950 Kaman Servoflap US2695674jorge paezNoch keine Bewertungen
- Errata Sheet For Fundamentals of Thermodynamics: Claus Borgnakke and Richard E. SonntagDokument3 SeitenErrata Sheet For Fundamentals of Thermodynamics: Claus Borgnakke and Richard E. SonntagNot my documentsNoch keine Bewertungen
- Group 7 Final Project PhysicsDokument8 SeitenGroup 7 Final Project PhysicsJoshua Ray MananquilNoch keine Bewertungen
- Manual Volvo XC90 2005Dokument17 SeitenManual Volvo XC90 2005Diego Alejandro QuinteroNoch keine Bewertungen
- Elasticity Ee PDFDokument13 SeitenElasticity Ee PDFravi0% (1)