Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- A Compact Microstrip-Fed Patch Antenna With Enhanced Bandwidth and Harmonic SuppressionDokument8 SeitenA Compact Microstrip-Fed Patch Antenna With Enhanced Bandwidth and Harmonic SuppressionBouhafs AbdelkaderNoch keine Bewertungen
- Pro 2004 ModificationsDokument5 SeitenPro 2004 ModificationsKI4JMYNoch keine Bewertungen
- John Deere MTG 4g LteDokument2 SeitenJohn Deere MTG 4g Ltewqd dqwdwdNoch keine Bewertungen
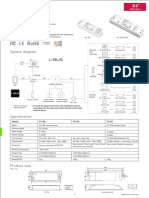
- LED Wireless Driver: System DiagramDokument2 SeitenLED Wireless Driver: System Diagrammauro zarateNoch keine Bewertungen
- DTF TestDokument15 SeitenDTF TestOrlando O. GutierrezNoch keine Bewertungen
- PulseLarsenAntennas Catalog Version14Dokument45 SeitenPulseLarsenAntennas Catalog Version14Alex TehNoch keine Bewertungen
- Microwave ExperimentDokument37 SeitenMicrowave Experimentsufiyan aliNoch keine Bewertungen
- Wireless: Process AutomationDokument2 SeitenWireless: Process AutomationZulfadli RaniNoch keine Bewertungen
- LTE Parameters Commonly Used For OptimizDokument8 SeitenLTE Parameters Commonly Used For Optimizأبوعمر الفاروق عبدالرحمنNoch keine Bewertungen
- 1.3G SYSTRA - IntroDokument48 Seiten1.3G SYSTRA - Introjitendra_engNoch keine Bewertungen
- BSA Antenna TheoryDokument92 SeitenBSA Antenna TheorySandeep ShendeNoch keine Bewertungen
- WLAN7001C: 1 General DescriptionDokument22 SeitenWLAN7001C: 1 General DescriptionMuhammad AsadNoch keine Bewertungen
- ACM360 Datasheet enDokument2 SeitenACM360 Datasheet enErick MelendezNoch keine Bewertungen
- Amtransmitter 160823133113 PDFDokument32 SeitenAmtransmitter 160823133113 PDFJirah Sumadia GicangaoNoch keine Bewertungen
- Rise and Fall of Nokia (2014)Dokument14 SeitenRise and Fall of Nokia (2014)Amit71% (7)
- Industrial Training 15EC390L: - Presented By: - Saundrya Nair - (RA1611004020231)Dokument21 SeitenIndustrial Training 15EC390L: - Presented By: - Saundrya Nair - (RA1611004020231)Saundrya NairNoch keine Bewertungen
- IEEE 802.11ax: On Time Synchronization in Asynchronous OFDM Uplink Multi-User MIMO Physical LayerDokument5 SeitenIEEE 802.11ax: On Time Synchronization in Asynchronous OFDM Uplink Multi-User MIMO Physical LayerTSIMANDRESY HeriniainaNoch keine Bewertungen
- Fundamental Antenna ParametersDokument37 SeitenFundamental Antenna ParametersTharcis Paulraj100% (1)
- Patch Antennas: ObjectivesDokument17 SeitenPatch Antennas: ObjectivesNaveed ahmadNoch keine Bewertungen
- Flight Plan From OLBA (BEY) To OMDB (DXB)Dokument38 SeitenFlight Plan From OLBA (BEY) To OMDB (DXB)Ali KassemNoch keine Bewertungen
- Bidirectional Antenna - Multi-Band 824 - 960 MHZ, 1710 - 2170 MHZ 738 445, 738 446Dokument1 SeiteBidirectional Antenna - Multi-Band 824 - 960 MHZ, 1710 - 2170 MHZ 738 445, 738 446Virgil PeiulescuNoch keine Bewertungen
- Detection and Formation Process of Overheated Electrical Joints Due To Faulty Connections PDFDokument8 SeitenDetection and Formation Process of Overheated Electrical Joints Due To Faulty Connections PDFwy6279Noch keine Bewertungen
- Telecommunication Breakdown Concepts of Communication Transmitted Via Software Defined Radio Matlab Code PDFDokument404 SeitenTelecommunication Breakdown Concepts of Communication Transmitted Via Software Defined Radio Matlab Code PDFpeterNoch keine Bewertungen
- Radio Stations SymbolsDokument5 SeitenRadio Stations Symbolssimbolo_electronicoNoch keine Bewertungen
- Radio Shack Pro-94Dokument76 SeitenRadio Shack Pro-94CharliebrownBrownNoch keine Bewertungen
- Physics Project:-Wireless Technology: The Advancement in The Latest DecadeDokument8 SeitenPhysics Project:-Wireless Technology: The Advancement in The Latest DecadePammi PreetNoch keine Bewertungen
- Apn LagiDokument15 SeitenApn LagiUkie Bennington モメヽナNoch keine Bewertungen
- Chapter 4 - Part 1Dokument58 SeitenChapter 4 - Part 1Ilavarasan TamizhNoch keine Bewertungen
- 1 TBS25 BrochureDokument3 Seiten1 TBS25 BrochurekamalNoch keine Bewertungen
- 2016 12 02 (I Iib) TDokument31 Seiten2016 12 02 (I Iib) TnsiyamNoch keine Bewertungen