Das könnte Ihnen auch gefallen
- The Phi Accrual Failure DetectorDokument16 SeitenThe Phi Accrual Failure DetectorxotidNoch keine Bewertungen
- DS&CC Lab ManualDokument23 SeitenDS&CC Lab ManualDEEPAK. B. SHELKE A-101Noch keine Bewertungen
- Michad L. Powdl David L. Presotto: 1. MotivationDokument10 SeitenMichad L. Powdl David L. Presotto: 1. MotivationDharani KumarNoch keine Bewertungen
- Software Fault Tolerance CH 1 PDFDokument24 SeitenSoftware Fault Tolerance CH 1 PDFNotme NosirNoch keine Bewertungen
- IFCM97 - An Integration Testing Method That Is Proved To Find All FaultsDokument29 SeitenIFCM97 - An Integration Testing Method That Is Proved To Find All Faultsصالح الشهرانيNoch keine Bewertungen
- Os Galvinsilberschatz SolDokument134 SeitenOs Galvinsilberschatz SolAakash DuggalNoch keine Bewertungen
- Failure Detectors For Large-Scale Distributed Systems: Naohiro Hayashibara Adel CherifDokument6 SeitenFailure Detectors For Large-Scale Distributed Systems: Naohiro Hayashibara Adel Cherifx435720Noch keine Bewertungen
- Linux 56 AssignmentDokument32 SeitenLinux 56 Assignmentr_k_sNoch keine Bewertungen
- Introduction To Concurrent Programming: Operating SystemsDokument18 SeitenIntroduction To Concurrent Programming: Operating Systemsonkar khavaleNoch keine Bewertungen
- Vision MissionsDokument39 SeitenVision MissionsRishabh MishraNoch keine Bewertungen
- Fault Diagnosis in Discrete-Event Systems: Incorporating Timing InformationDokument7 SeitenFault Diagnosis in Discrete-Event Systems: Incorporating Timing InformationFatiha HAMDINoch keine Bewertungen
- Distributed Sys Lab ManualDokument25 SeitenDistributed Sys Lab ManualabdulfetaNoch keine Bewertungen
- Investigating Real-Time Specifications For C#Dokument8 SeitenInvestigating Real-Time Specifications For C#abc123asdNoch keine Bewertungen
- Articulo A UnifyingDokument8 SeitenArticulo A UnifyingPaulina MarquezNoch keine Bewertungen
- Law-Governed Regularities in Object Systems Part 1: An Abstract ModelDokument40 SeitenLaw-Governed Regularities in Object Systems Part 1: An Abstract ModelmarcelinaatajarNoch keine Bewertungen
- Chandy LamportDokument13 SeitenChandy LamportS SorenNoch keine Bewertungen
- Real TimeDokument28 SeitenReal TimeEric VerhulstNoch keine Bewertungen
- p225 ChandraDokument43 Seitenp225 Chandrajoao.soares.diNoch keine Bewertungen
- Reliability and Maintainability in Operations ManagementDokument32 SeitenReliability and Maintainability in Operations ManagementilublessingNoch keine Bewertungen
- Fault Tree and Cause Consequence Analysis For Control Software ValidationDokument22 SeitenFault Tree and Cause Consequence Analysis For Control Software ValidationAerdiaNoch keine Bewertungen
- Principles of Fault ToleranceDokument16 SeitenPrinciples of Fault ToleranceMako KazamaNoch keine Bewertungen
- Explain How The Dijkstra's Banker's Algorithm Can Be Used To Avoid Unsafe Situations That Can Lead To Deadlock For A Single Resource TypeDokument6 SeitenExplain How The Dijkstra's Banker's Algorithm Can Be Used To Avoid Unsafe Situations That Can Lead To Deadlock For A Single Resource TypeDivyanshu KhobragadeNoch keine Bewertungen
- Build A Super Simple TaskerDokument22 SeitenBuild A Super Simple TaskerKanashimi KotobaNoch keine Bewertungen
- Easy Fault Injection and Stress Testing With FAIL-FCI: William Hoarau S Ebastien Tixeuil Fabien VauchellesDokument20 SeitenEasy Fault Injection and Stress Testing With FAIL-FCI: William Hoarau S Ebastien Tixeuil Fabien VauchellesMustafamna Al SalamNoch keine Bewertungen
- Real-Time System AssignmentDokument4 SeitenReal-Time System AssignmentTommy Kyen'de BilNoch keine Bewertungen
- Panzieri-Davoli1993 - Chapter - RealTimeSystemsATutorial (2) RealtimeDokument28 SeitenPanzieri-Davoli1993 - Chapter - RealTimeSystemsATutorial (2) RealtimeHuma Qayyum MohyudDinNoch keine Bewertungen
- Distributed SnapshotsDokument13 SeitenDistributed SnapshotsEberty AlvesNoch keine Bewertungen
- RTOS & VxWorks FundamentalsDokument15 SeitenRTOS & VxWorks Fundamentalsshailesh_verma35Noch keine Bewertungen
- Exploring Failure Transparency and The Limits of Generic RecoveryDokument15 SeitenExploring Failure Transparency and The Limits of Generic RecoveryarjunNoch keine Bewertungen
- S: A S F H R - T S: Tress Imulator OR ARD EAL IME YstemsDokument28 SeitenS: A S F H R - T S: Tress Imulator OR ARD EAL IME Ystems2K20CO478 Vedant KohliNoch keine Bewertungen
- On SequentializingDokument17 SeitenOn SequentializingMarcio DíazNoch keine Bewertungen
- Background: 1.1 General IntroductionDokument19 SeitenBackground: 1.1 General IntroductiondimtryNoch keine Bewertungen
- Delimited Continuations in Operating SystemsDokument12 SeitenDelimited Continuations in Operating Systemsanon-588603Noch keine Bewertungen
- Introduction To Operating System Concepts: Pamantasan NG CabuyaoDokument10 SeitenIntroduction To Operating System Concepts: Pamantasan NG CabuyaoBien MedinaNoch keine Bewertungen
- Technical Report: Frenetic: A High-Level Language For Openflow NetworksDokument20 SeitenTechnical Report: Frenetic: A High-Level Language For Openflow NetworksAlexandre BorgesNoch keine Bewertungen
- Run-Time Monitoring Real-Time SystemsDokument10 SeitenRun-Time Monitoring Real-Time SystemsArvind DhakaNoch keine Bewertungen
- Transaction Monitoring in Encompass: '1tandemcomputersDokument28 SeitenTransaction Monitoring in Encompass: '1tandemcomputerstuna06Noch keine Bewertungen
- Kalinsky - Context SwitchDokument12 SeitenKalinsky - Context SwitchRodrigo CedrimNoch keine Bewertungen
- A. Introduction:: Module 1: Overview To System DevelopmentDokument7 SeitenA. Introduction:: Module 1: Overview To System DevelopmentClayn Devi AlbaNoch keine Bewertungen
- An Adaptive Programming Model For Fault-Tolerant Distributed ComputingDokument14 SeitenAn Adaptive Programming Model For Fault-Tolerant Distributed ComputingieeexploreprojectsNoch keine Bewertungen
- Ran Dell 75Dokument18 SeitenRan Dell 75Adrian CucerzanNoch keine Bewertungen
- Chapter 1 - Why ThreadsDokument3 SeitenChapter 1 - Why Threadssavio77Noch keine Bewertungen
- Notes of Unit2Dokument28 SeitenNotes of Unit2Poojisha LakshyaNoch keine Bewertungen
- Principles of Operating Systems: Chapter EightDokument18 SeitenPrinciples of Operating Systems: Chapter Eightعلي طالبNoch keine Bewertungen
- Constraint Based Analysis: SeminarDokument21 SeitenConstraint Based Analysis: SeminarTouristNoch keine Bewertungen
- Crash-Only SoftwareDokument6 SeitenCrash-Only SoftwareJeremySharpNoch keine Bewertungen
- Snap-Stabilizing PIF and Useless ComputationsDokument8 SeitenSnap-Stabilizing PIF and Useless Computationsghoshtapan4321Noch keine Bewertungen
- 5403 AnswersDokument6 Seiten5403 AnswersPardeep KaurNoch keine Bewertungen
- Sequence Control With ExpressionsDokument22 SeitenSequence Control With ExpressionsSangam KumarNoch keine Bewertungen
- Race Conditions: Process SynchronizationDokument5 SeitenRace Conditions: Process SynchronizationshezipakNoch keine Bewertungen
- November 2012 Bachelor of Computer Application (BCA) - Semester 3 BC0042 - Operating Systems - 4 CreditsDokument7 SeitenNovember 2012 Bachelor of Computer Application (BCA) - Semester 3 BC0042 - Operating Systems - 4 CreditsAarush UpadhayaNoch keine Bewertungen
- Fuzzy Logic in Critical Section of Operating SystemDokument7 SeitenFuzzy Logic in Critical Section of Operating SystemResearch Cell: An International Journal of Engineering SciencesNoch keine Bewertungen
- ConfiabilidadDokument33 SeitenConfiabilidadrsantanaNoch keine Bewertungen
- Operating System: Assighnment - 1Dokument6 SeitenOperating System: Assighnment - 1NarayanaMunnaNoch keine Bewertungen
- Software Tool For Distributed Elevator SystemsDokument9 SeitenSoftware Tool For Distributed Elevator Systemsnebojsa_n_nikolicNoch keine Bewertungen
- VHDL Tutorial: Peter J. AshendenDokument84 SeitenVHDL Tutorial: Peter J. AshendenCristi MarcuNoch keine Bewertungen
- Fernandez Mounier Pachon 05Dokument16 SeitenFernandez Mounier Pachon 05Ali AhmedNoch keine Bewertungen
- Icdcs 00 RaynalDokument20 SeitenIcdcs 00 Raynaljoao.soares.diNoch keine Bewertungen
- Opencl 2.0 Features: Benjamin Coquelle MAY 2015Dokument40 SeitenOpencl 2.0 Features: Benjamin Coquelle MAY 2015sdancer75Noch keine Bewertungen
- 3.2 PreprocessingDokument10 Seiten3.2 PreprocessingALNATRON GROUPSNoch keine Bewertungen
- UPT 59 - Full Document - Poultry Farm Management SystemDokument25 SeitenUPT 59 - Full Document - Poultry Farm Management SystemTaj SNoch keine Bewertungen
- Contents Page No.: Sms GatewayDokument36 SeitenContents Page No.: Sms GatewayRohan JainNoch keine Bewertungen
- 01.4-ES6+ Practice Question Set 4Dokument3 Seiten01.4-ES6+ Practice Question Set 4shaamidreezNoch keine Bewertungen
- Cs402 Mid Term by JuanidDokument35 SeitenCs402 Mid Term by JuanidIrsa ZaibNoch keine Bewertungen
- Ejercicios Interpolacion LagrangeDokument1 SeiteEjercicios Interpolacion LagrangeStephanie MoralesNoch keine Bewertungen
- Crash 2022 03 15 15 34 35 1647329675755Dokument2 SeitenCrash 2022 03 15 15 34 35 1647329675755Uniteam DefenderNoch keine Bewertungen
- Python Style Guide - How To Write Neat and Impressive Python CodeDokument14 SeitenPython Style Guide - How To Write Neat and Impressive Python CodeKhalil AhmadNoch keine Bewertungen
- DWTDokument1 SeiteDWTbalu56kvNoch keine Bewertungen
- Q2 Integers: AnswerDokument3 SeitenQ2 Integers: AnswerSashineka SumbulingamNoch keine Bewertungen
- MCS 011Dokument4 SeitenMCS 011kk2760057Noch keine Bewertungen
- Chapter 7 - RMIDokument35 SeitenChapter 7 - RMIgebretsadik getoNoch keine Bewertungen
- CH 8 Answer Key CK-12 MSM Concepts - Grade 6 PDFDokument8 SeitenCH 8 Answer Key CK-12 MSM Concepts - Grade 6 PDFKarthi KeyanNoch keine Bewertungen
- Unit 1 MCQDokument10 SeitenUnit 1 MCQ30. Suraj IngaleNoch keine Bewertungen
- Aggressive Unboxing in The Dart VMDokument74 SeitenAggressive Unboxing in The Dart VMVitalNoch keine Bewertungen
- Namma Kalvi 12th Computer Science Practical Work Book em 215156Dokument21 SeitenNamma Kalvi 12th Computer Science Practical Work Book em 215156MUTHUKRISHNAN.RNoch keine Bewertungen
- Advanced CompSci Sample Pages Combined REDUCEDDokument20 SeitenAdvanced CompSci Sample Pages Combined REDUCEDdahjkdhsaNoch keine Bewertungen
- 06 Week6 8 Software Security BDokument61 Seiten06 Week6 8 Software Security BOscar WongNoch keine Bewertungen
- File Handling 1Dokument17 SeitenFile Handling 1Shilpita JanaNoch keine Bewertungen
- IT8500plus Programming Guide-EN - SCPIDokument79 SeitenIT8500plus Programming Guide-EN - SCPIRobert SeredenkoNoch keine Bewertungen
- Unit 1 - Computer Organization and Architecture - WWW - Rgpvnotes.inDokument33 SeitenUnit 1 - Computer Organization and Architecture - WWW - Rgpvnotes.inRanjana DalwaniNoch keine Bewertungen
- Python and Machine Learning: A Practical Training Report OnDokument65 SeitenPython and Machine Learning: A Practical Training Report Onaman guptaNoch keine Bewertungen
- EvidenceDokument4 SeitenEvidenceKoolesh JoymungulNoch keine Bewertungen
- 9Dokument12 Seiten9Biel LostNoch keine Bewertungen
- Digital SignatureDokument10 SeitenDigital SignatureabyNoch keine Bewertungen
- Learn C++ in A DAYDokument67 SeitenLearn C++ in A DAYArcon Solite BarbanidaNoch keine Bewertungen
- OOP Using C++ Practical MannualDokument18 SeitenOOP Using C++ Practical MannualVijay GadichaNoch keine Bewertungen
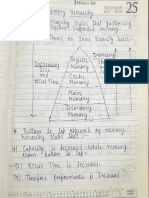
- Memory HierarchyDokument2 SeitenMemory HierarchyNitish Kumar VermaNoch keine Bewertungen
- Python For Programmers - A Project-Based TutorialDokument131 SeitenPython For Programmers - A Project-Based TutorialMohamed Farook Mohamed FazrinNoch keine Bewertungen