Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Alien Legacy-Manual PDFDokument93 SeitenAlien Legacy-Manual PDFMark BallingerNoch keine Bewertungen
- FrictionDokument4 SeitenFrictionMuzafar ahmadNoch keine Bewertungen
- Exact Solution Tank DrainageDokument8 SeitenExact Solution Tank DrainageFelipe CastNoch keine Bewertungen
- Presentation 2308Dokument25 SeitenPresentation 2308marcoNoch keine Bewertungen
- Instrument Transformer Fuses Types WBP and BRT: Catalogue B12/06/01/EDokument8 SeitenInstrument Transformer Fuses Types WBP and BRT: Catalogue B12/06/01/EivanramljakNoch keine Bewertungen
- Fpcroute User GuideDokument34 SeitenFpcroute User GuideJosé EireneNoch keine Bewertungen
- Google Assistant Home Automation CodeDokument3 SeitenGoogle Assistant Home Automation CodeStjepan BartolovićNoch keine Bewertungen
- RF Engineer - Small Cell Design (Ibwave) - Job DescriptionDokument2 SeitenRF Engineer - Small Cell Design (Ibwave) - Job Descriptionmansoor 31 shaikhNoch keine Bewertungen
- APU TA Training Manual (JUNE 2013)Dokument57 SeitenAPU TA Training Manual (JUNE 2013)zhuhangNoch keine Bewertungen
- CMM 23-70-04 CVR Fa2100 L3Dokument334 SeitenCMM 23-70-04 CVR Fa2100 L3Romain ANGUELU100% (1)
- CPT 31624 Cci EditsDokument2 SeitenCPT 31624 Cci Editsravip3366Noch keine Bewertungen
- ASTM D445-Viscoz Cinematica PDFDokument9 SeitenASTM D445-Viscoz Cinematica PDFCorina StanculescuNoch keine Bewertungen
- Biogas Presentation PDFDokument44 SeitenBiogas Presentation PDFAli Aamir100% (1)
- IBM Flex System p270 Compute Node Planning and Implementation GuideDokument630 SeitenIBM Flex System p270 Compute Node Planning and Implementation GuideAnonymous Qvouxg2aNoch keine Bewertungen
- Telescoping Guide Rhs and Chs Aug13 sj0510-1Dokument2 SeitenTelescoping Guide Rhs and Chs Aug13 sj0510-1Richard GrahamNoch keine Bewertungen
- Johnloomis Org Ece563 Notes Geom Resize ImresizeDokument10 SeitenJohnloomis Org Ece563 Notes Geom Resize ImresizeAdrian Jose Costa OspinoNoch keine Bewertungen
- Institute of Technology & Engineering, Malegaon BK.: Lesson Teaching Plan (LTP)Dokument3 SeitenInstitute of Technology & Engineering, Malegaon BK.: Lesson Teaching Plan (LTP)Pramod DhaigudeNoch keine Bewertungen
- DLP Sample Detailed Lesson PlanDokument4 SeitenDLP Sample Detailed Lesson PlanJaydie PalNoch keine Bewertungen
- Transformer Design and Optimization A Literature Survey PDFDokument26 SeitenTransformer Design and Optimization A Literature Survey PDFRushikesh MaliNoch keine Bewertungen
- Mathalino: E N W S G S V V V V V W W W D Γ Γ Γ Γ Γ Γ Γ Γ Ll Pl Li Pi GiDokument8 SeitenMathalino: E N W S G S V V V V V W W W D Γ Γ Γ Γ Γ Γ Γ Γ Ll Pl Li Pi GiLovely Joy ArdanielNoch keine Bewertungen
- Aset WTP HarapanDokument7 SeitenAset WTP HarapanReinhard SimbolonNoch keine Bewertungen
- GasesDokument102 SeitenGasesLya EscoteNoch keine Bewertungen
- Gujarat Technological University: A Project Report On:-Automatic Water Purification SystemDokument11 SeitenGujarat Technological University: A Project Report On:-Automatic Water Purification SystemJay KakadiyaNoch keine Bewertungen
- Apple Value ChainDokument3 SeitenApple Value ChainKeng Keat Lim100% (2)
- Plan Holders ReportDokument8 SeitenPlan Holders ReportSusan KunkleNoch keine Bewertungen
- Sub Test Mole Concept PDFDokument7 SeitenSub Test Mole Concept PDFVIKAS GARGNoch keine Bewertungen
- Survey Form ADokument8 SeitenSurvey Form ASabaji MalekarNoch keine Bewertungen
- PipeDokument30 SeitenPipepudumai100% (1)
- Free Manual Solution PDF PDFDokument19 SeitenFree Manual Solution PDF PDFSon Le Minh50% (2)
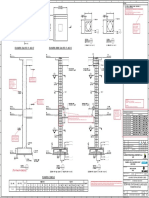
- 327101-BJ81-C-RCC-0007 Rev.00 - Client MarkupDokument1 Seite327101-BJ81-C-RCC-0007 Rev.00 - Client MarkupGokulprabhuNoch keine Bewertungen