Beruflich Dokumente
Kultur Dokumente
IOI Automatizacion
Hochgeladen von
tomuricanOriginaltitel
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
IOI Automatizacion
Hochgeladen von
tomuricanCopyright:
Verfügbare Formate
Automatizacin de Procesos Industriales
INGENIERIA ORGANIZACIN INDUSTRIAL AUTOMATIZACIN DE PROCESOS INDUSTRIALES AUTMATAS ELCTRICOS CONVENIENCIA DE LOS CIRCUITOS DE MANDO Debemos de destacar la conveniencia de los circuitos de mando. Cuando se pretende alimentar un elemento o sistema elctrico permitiendo cierto grado de maniobra (no limitada nicamente a la apertura o cierre), es conveniente separar el esquema elctrico en dos: uno principal o de potencia y otro secundario o de mando (y sealizacin). El circuito principal ser el encargado de transmitir la potencia al elemento accionado. Constar de tres o cuatro hilos o conductores en el caso de alimentacin trifsica o de dos hilos en caso de alimentacin monofsica o de corriente continua y a los niveles adecuados de tensin (220 V o superior). Estos conductores debern soportar el paso de la corriente para el que las mquinas estn diseados. El circuito de mando ser el encargado de realizar las funciones de temporizacin, autorretencin, enclavamiento, etc, que nos permita un mayor control del proceso o dispositivo. Consta de dos hilos por que se trabaja generalmente con tensin alterna monofsica de 220 V o menor. Los elementos que forman parte del circuito de mando no maniobran con elevadas potencias y por tanto no se les exigen las mismas condiciones que los elementos del circuito de potencia (son ms baratos). De todos modos, al separar el circuito en dos, se consigue: Una simplificacin en los esquemas, pues se trabajan con dos esquemas diferentes ms sencillos. Una ahorro en cableado, pues el mando se encarga a un circuito monofsico en vez de trifsico. Un ahorro en los elementos, pues a los elementos del circuito de mando no se les exige las mismas caractersticas que a los de potencia. Si el elemento a alimentar es de escasa potencia y la maniobra que se pretende realizar es simple, no suele haber esta separacin. NECESIDAD DE LOS ELEMENTOS DE PROTECCIN Adems de las acciones de maniobra en las que puede englobarse en lo que se denominara la operacin normal de la instalacin, existen otras acciones que son necesarias para proteger los elementos de la instalacin o para proteger a las personas. De estas acciones se encargan los elementos de proteccin.
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
Automatizacin de Procesos Industriales
Dentro del primer grupo, las destinadas a la proteccin de los elementos, se encuentran todos los dispositivos encargados de detectar condiciones anormales de funcionamiento y de realizar las acciones oportunas para evitar las consecuencias dainas de ese mal funcionamiento, generalmente interrumpiendo la alimentacin del elemento en situacin anormal. Esta accin de interrupcin a veces es instantnea tras la deteccin de la situacin y otras veces permite cierto retardo en funcin de la gravedad de la situacin. Los principales elementos dentro de este grupo son los rels trmicos o magnetotrmicos y los fusibles, que se encargan de detectar (los rels) o de detectar y despejas (los fusibles) las sobrecargas y cortocircuitos. Existen otros muchos rels que detectan, por ejemplo, la apertura de un conductor en la alimentacin de motores, fallos en los circuitos de excitacin de mquinas sncronas, funcionamiento como motor de alternadores, etc. En este sentido conviene introducir el concepto de condiciones nominales. Son aquellas por encima de las cuales el equipo no est garantizado que funcione perfectamente durante el periodo de vida del mismo. Si se trabaja por encima de la tensin nominal, es posible que los aislamientos no soporten esta tensin y se produzcan descargas y contorneamientos. Tambin puede dar lugar a corrientes mayores de las esperadas. Si se trabaja por encima de la intensidad nominal, las prdidas por efecto Joule son demasiado elevadas y es posible que el sistema de refrigeracin del equipo no permita disipar el calor, con lo que la temperatura sube excesivamente y puede daar el aislamiento. Por otro lado, un par por encima del nominal en una mquina rotativa puede producir una fatiga excesiva del material o directamente ocasionar la rotura del eje. Dentro del segundo grupo, los que se refiere a la proteccin de las personas, el principal es el rel diferencial, que detecta fugas de corriente. ELEMENTOS EN UNA INSTALACION ELECTRICA A continuacin se describirn brevemente los principales elementos de los circuitos de mando, proteccin y potencia de baja tensin. a) PULSADOR Es un contacto que tiene una sola posicin estable. Esta posicin estable permitir el paso de corriente y en este caso ser un pulsador normalmente cerrado o pulsador de apertura (o pulsador de paro), o bien no lo permitir y ser un pulsador normalmente abierto o pulsador de cierre (o pulsador de marcha). Cuando el pulsador normalmente cerrado es activado manualmente (se pulsa), el contacto se abre, y abre tambin el circuito durante el tiempo en que se mantiene pulsado.
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
Automatizacin de Procesos Industriales
Cuando el pulsador normalmente abierto es activado, el contacto se cierra, y realiza la conexin elctrica entre sus contactos. Al dejar de pulsar, el circuito se abre y cesa la alimentacin del elemento maniobrado. b) CONTACTOR Es un elemento de accionamiento electromagntico. Su misin es la de establecer la corriente de alimentacin de un dispositivo elctrico (tpicamente un motor). Esto se consigue aplicando tensin a la bobina del contactor. El contactor sirve para comunicar las rdenes finales obtenidas del circuito de mando al circuito principal, aunque no hay contacto elctrico entre ambos. Los principales constituyentes son: 1. El electroimn: Formado por un circuito magntico y una bobina. Es el rgano activo. Cuando se aplica una tensin a la bobina, el yugo (parte fija del circuito magntico) atrae al martillo (parte mvil), y este, en su movimiento, arrastra a todos los contactos que van solidariamente unidos a l. De esta manera, la aplicacin de una tensin a la bobina del contactor (dentro del circuito de mando) se transforma en la apertura y cierre de una serie de contactos (del circuito de potencia y tambin del de mando). 2. Los polos o contactos principales: Son los elementos que establecen y cortan las corrientes del circuito principal. Esto se consigue por separacin de sus contactos, lo que produce un arco elctrico que hay que controlar. Por eso, los contactos de los polos son las piezas que estn sometidas al trabajo ms duro en el contactor. 3. Contactos auxiliares: Son los elementos que establecen y cortan corrientes en el circuito de mando. Realizan las funciones de sealizacin, enclavamiento, autorretencin, etc. Normalmente es accionado (directa o indirectamente) por pulsadores (marcha), o rels trmicos. c) REL Elemento tpicamente usado en proteccin aunque por su funcionamiento puede desempear funciones de maniobra. Los rels usados en proteccin, cuando se da una determinada condicin indicativa de un mal funcionamiento, se produce la apertura de sus polos (contactos) interrumpiendo la alimentacin de un circuito elctrico o mquina. Esta condicin suele ser la de una excesiva intensidad, pero
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
Automatizacin de Procesos Industriales
tambin puede producirse el disparo (apertura de contactos), por una excesivamente grande o pequea tensin o frecuencia, por una inadecuada direccin de la potencia, por una baja intensidad en el circuito de excitacin de mquinas sncronas, etc. En baja tensin, y para pequeas potencias consta de un elemento sensible que detecta la condicin de apertura y otro elemento actuador que realmente produce la apertura de los polos agrupados en un mismo cuerpo. En alta tensin o con potencias elevadas, estos dos elementos estn separados por un rgano sensible (rel propiamente dicho) y el rgano actuador o mecanismo de disparo (disyuntor). Los principales y ms sencillos rels de proteccin que se encuentran en una instalacin elctrica (y por tanto en el cuadro elctrico de una instalacin de electrobomba) son los: Rels trmicos: que protegen al circuito frente sobrecargas (intensidades por encima de la nominal); no actan instantneamente sino que el tiempo que tardan en abrir sus polos (o dar la orden de apertura) depende de cunto ms elevada es la intensidad por encima de la nominal. Rels magnetotrmicos: que unen a su caracterstica trmica un elemento que opera instantneamente por acciones electromagnticas cuando la intensidad es muy superior a la nominal, previsiblemente porque existe un cortocircuito cercano; la accin magntica puede llevar incorporada un retardo independiente de la intensidad. Los rels usados en el control se encuentran precisamente en este circuito, con muy tpicos los de: Rels de tiempo o temporizados: como los rels de retardo a la conexin que no abren o cierran sus contactos hasta que no han trascurrido un cierto tiempo desde que se le da la orden (desde que se excita la bobina del rel); o los rels de retardo a la desconexin, que conmuta sus contactos cuando se da la orden, manteniendo esta conmutacin hasta pasado un tiempo desde que se deja de aplicar dicha orden. Rels de conmutacin: que abren o cierran sus contactos cuando se alimenta su bobina, sin temporizacin; se asemejan a los contactores pero sin contactos principales. d) CORTACIRCUITOS FUSIBLE O FUSIBLE Elementos nicamente de proteccin frente a cortocircuitos. Se componen de un hilo delgado que se funde por efecto Joule al ser atravesado por la corriente de cortocircuito. En altas potencias, existen fusibles trifsicos que al fundirse alguno de los hilos, produce la apertura de las otras fases, evitando as una peligrosa (para los motores) alimentacin desequilibrada.
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
Automatizacin de Procesos Industriales
Las caractersticas de los fusibles dependen del elemento al que protegen. As los fusibles destinados a proteger dispositivos semiconductores han de fundirse rpidamente al sobrepasar la intensidad nominal mientras que los destinados a proteger motores deben de aguantar las puntas de arranque sin fundirse durante el tiempo que tarda en arrancar los motores. e) SECCIONADOR Es un elemento de maniobra ms propio de alta tensin. Asegura la apertura de un circuito, por ejemplo para realizar labores de mantenimiento en una lnea o equipo. No pueden abrir o cerrar bajo carga (pasando intensidad). En el caso de poder abrir o cerrar bajo carga, se denomina seccionadores bajo carga. Pueden llevar un fusible incorporado, que actuara ante cortocircuitos, y sera un ruptofusible. f) DISYUNTOR Elemento de proteccin accionado por un rel. Es capaz de interrumpir corrientes de cortocircuito (muy elevadas). Su poder de corte (intensidad capaz de interrumpir) depende principalmente de las caractersticas (y por tanto precio) de los polos y de la capacidad de eliminar el arco que se establece al intentar interrumpir una intensidad elevada por la separacin de los polos. Tambin pueden interrumpir intensidades de operacin normal o sobrecarga, o establecer la corriente elctrica (es ms fcil cerrar un circuito y establecer una corriente que abrir el circuito e interrumpir la misma corriente). g) INTERRUPTOR Elemento de proteccin y maniobra. Interrumpe o establece la intensidad nominal o con leve sobrecarga. Aunque se confunde este trmino con el de disyuntor, el interruptor propiamente dicho de baja tensin no interrumpe la intensidad de cortocircuito. Dentro de los circuitos de control en baja tensin es posible encontrarlos como elemento de maniobra, aunque en estos casos se suele emplear otros trminos como posicionador, interruptor seccionador, selector, interruptor de posicin o conmutador. Es un contacto con dos posiciones estables. En una el contacto est abierto y en la otra, cerrado. Algunos tipos de conmutadores, pueden establecer ms de un circuito, o bien abrir un circuito a la vez que cierran otro. Tambin en baja tensin, pero en el circuito de potencia, sera un elemento de proteccin contra sobrecargas o tambin un elemento de maniobra.
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
Automatizacin de Procesos Industriales
h) PEQUEO INTERRUPTOR AUTOMATICO Elemento de maniobra y proteccin empleado en instalaciones de baja tensin de poca potencia. Establece y corta la corriente nominal y tambin la de cortocircuito. Son dispositivos diseados de forma que al detectar cierto tipo de anomala en el circuito, ordena su propio disparo, dejando el circuito abierto. i) INTERRUPTOR DIFERENCIAL Elemento de proteccin que detecta los defectos de aislamiento. Da lugar a disparo instantneo cuando existe una intensidad que se deriva a masa por encima de un determinado valor. Si existe un defecto de aislamiento, un conductor puede quedar unido elctricamente a la carcasa o a alguna parte accesible por el personal, con lo que dicha parte estara a un potencial (tensin) peligroso para el operario. Para evitarlo, si la instalacin tiene una adecuada toma a tierra se derivar una intensidad en el momento en que produzca dicho defecto de aislamiento y el interruptor diferencial interrumpir la alimentacin no permitiendo la conexin hasta que no se detecte y repare el defecto. DESIGNACIN DE APARATOS Los paratos reciben una denominacin simblica que se compone de tres caracteres: ANF Donde: A: Indica el tipo de aparato. N: Es un nmero ordinal para distinguir aparatos y funciones. F: Es una letra indicativa de la funcin del aparato. Los tipos de aparatos (A) ms usuales son: Rels y contactores K. Motores M. Interruptores S. Dispositivos de proteccin F.
Las funciones (F)ms usuales son: Proteccin F. Funcin principal M. Estado (marcha, parada) Q. Direccin de movimiento (adelante, atrs, izquierda, derecha) B. Temporizacin T.
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
Automatizacin de Procesos Industriales
DESIGNACIN DE LOS PUNTOS DE CONEXIN Los bornes de la bobinas de los contactores se identifican con una letra y un nmero (A1-A2). Los contactos principales de los aparatos de maniobra y proteccin se caracterizan mediante cifras de un solo digito. Los puntos de conexin sern impar y el inmediato superior. Los contactos auxiliares mediante dos dignitos, el primero expresar el tipo de funcin (abierto/cerrado, especial), el segundo un ordinal. Para los normalmente cerrados se emplea el 1-2, para los normalmente abiertos el 3-4. Red de corriente alterna: Fase 1 Fase 2 Fase 3 Neutro L1 L2 L3 N
Red de corriente continua: Polo positivo Polo negativo Neutro Conductor proteccin Neutro-proteccin Masa L+ LM PE PEN MM
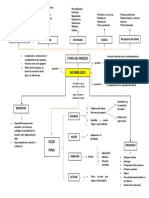
CONFIGURACIONES A TENER EN CUENTA 1 ARRANQUE ESTRELLA TRIANGULO Este tipo de arranque es muy utilizado en la industria. En el arranque de los motores (hasta que estos alcanzan la velocidad nominal) se produce un aumento de la corriente absorbida por la red que puede llegar a ser de hasta ocho veces la corriente nominal. Con esta configuracin, durante el arranque disminuye la corriente en un tercio, y por tanto las cadas de tensin en los aparatos cercanos. Al pulsar el interruptor de marcha el motor se alimenta en estrella, es decir, cada una de las fases alimentan una de las bobinas por su extremo, quedando unidas en un mismo punto el otro extremo de las tres bobinas. Al transcurrir el tiempo estipulado en un temporizador (tiempo cercano en alcanzar la velocidad nominal), se conmuta a triangulo, para lo que se abre esta conexin en las salidas de las bobinas y se conecta cada una de ellas en una fase distinta a la de la entrada (R-S, S-T, T-R), de esta forma se alimentan las bobinas a la tensin de lnea. El motor se dispone a funcionar en su rgimen nominal.
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
Automatizacin de Procesos Industriales
Podemos observar en el circuito principal la existencia de unos fusibles de proteccin contra cortocircuitos (producen corrientes muy elevadas) designados por F1F. Le sigue los contactos principales de un contactor K1M, que alimenta cuando estn cerrados los bornes de cada una de las bobinas (U, V, W). Entre ambos los contactos de un rel trmico F2F. El pulsador S0Q es un pulsador de paro. La funcin de F1F es la de proteccin directa del circuito principal. Es un fusible cuya accin se limita a proteccin frente cortocircuitos. Si existe un cortocircuito en el circuito principal, se abre el fusible y se despeja el cortocircuito. La funcin de F2F es la de proteccin indirecta del circuito de potencia, principalmente del motor. Es un rel trmico que acta frente a sobrecargas mantenidas durante un tiempo (funcin inversa a la intensidad). Si existe una sobrecarga mantenida, abre el contacto NC que se halla en el circuito de mando, lo que impide la alimentacin de K1B y K2B y deja de alimentar el motor. Los bornes de salida (U, V, W) estn conectados a los contactos principales de dos contactores K2M y K3M. En el momento de pulsar el pulsador de marcha S1Q, se excitara la bobina K2M (contactos normalmente abiertos que se cierran), establecindose la conexin en
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
Automatizacin de Procesos Industriales
estrella, en ese momento se excita de igual modo, al cerrar K2M, K1M. Se produce el autoenclavamiento de K1M. Se alimenta del rel temporizador con retardo a la conexin (se produce el accionamiento de los contactos un tiempo despus de recibir la seal). Cuando transcurre el tiempo marcado por el rel temporizador con retardo a la conexin K4T, dejar de excitarse la bobina de K2M (contactos normalmente abiertos que se cerraran), y se excitar la bobina de K3M, ya que mientras K2M esta excitado, su contacto auxiliar NC se abre impidiendo la alimentacin de K3M, disponindose la configuracin triangulo. K1M continua con su enclavamiento. 2 ARRANQUE DEL MOTOR MEDIANTE RESISTENCIA Y CON INVERSOR DE GIRO Se trata de un circuito que realiza dos funciones, la de arrancar el motor mediante la inclusin de resistencias, disminuyendo la intensidad en el arranque, lo que produce cadas de tensin en los aparatos cercanos. Con la inclusin de estas resistencias, la diferencia de potencial en las bornes del motor es menor, ya que existe una cada de tensin en las resistencias en serie. Para anular las resistencias producimos el cortocircuito de las mismas. La otra funcin es un inversor de giro. Para producir el giro de un motor en corriente alterna trifsica bastar con invertir dos conductores de la alimentacin del motor. Con ello se consigue cambiar la secuencia de las fases y por lo tanto del giro. Hay que tener en cuenta que cada cambio de giro se tratar como un nuevo arranque del motor en lo que a limitacin de corriente se refiere. Al igual que en el circuito anterior, nos encontramos con el fusible F1F, y con el rel trmico F2F. El fusible F1F protege al circuito de mando frente cortocircuitos. Si existe un cortocircuito se abrir despejando el cortocircuito. Como efecto aadido, se deja de alimentar las bobinas, con lo que se abrirn los polos de K1B y K2B, si estaban alimentados y se para el motor. La funcin F2F es la de proteccin indirecta del circuito de potencia, principalmente al motor. Es un rel trmico que acta frente a sobrecargas mantenidas durante un tiempo (funcin inversa a la intensidad). Si existe una sobrecarga mantenida, abre el contacto NC que se haya en el circuito de mando, lo que impide la alimentacin de K1B y K2B. K1B y K2B son los contactores, que a travs de sus contactos se alimenta el motor. Segn cual este activado se producir una secuencia u otra de las fases y por lo tanto el sentido del giro del motor. K3Q es el contactor, cuyos contactos mientras estn abiertos permite el paso de la corriente por las resistencias, lo que provoca una cada de tensin en las mismas, y la diferencia de potencial en los bornes de motor es menor. Cuando se cierra, se cortocircuita las resistencias, por lo que la diferencia de potencial en las bornes del motor es la de la red.
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
Automatizacin de Procesos Industriales
Los contactos normalmente cerrados S1B y S2B, colocados en la lnea de alimentacin de las bobinas de los rels K2B y K1B respectivamente, sirven para que cuando activemos un sentido de giro determinado, cerrando la alimentacin a la bobina correspondiente, se abra la misma para la alimentacin al la bobina contraria. Los contactos normalmente abiertos K1B y K2B, en paralelo con los pulsadores normalmente abiertos S1B y S2B, se utiliza para el autoenclavamiento de la bobina de su contactor, propicindole un camino de alimentacin para cuando se deje de presionar el pulsador. Los contactos normalmente cerrados K2B y K1B, colocados en la lnea de alimentacin de las o bobinas rels K1B y K2B respectivamente, sirven para que no se pueda alimentar un contactor mientras el otro este activado o alimentado. Esto es necesario para evitar cortocircuitos bifsicos al pulsar S1B o S2B. En cuanto el sistema de arranque del motor, hay que observar que en circunstancias normales el contactor K3Q esta alimentado, por lo que cerrara sus contactos y cortocircuitar las resistencias. Cuando se produce el arranque o la inversin de giro, se alimenta K4A que deja de alimentar K3Q, abrindose los polos, permitiendo el paso de la corriente a travs de las resistencias. El contacto auxiliar, normalmente abierto K4A se cierra. Si como es de esperar se produce una intensidad mayor del nivel ajustado para el rel de intensidad F3N, se cerrar su contacto normalmente abierto y se producir la autoretencin de la bobina K4A, cuando deje de
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
10
Automatizacin de Procesos Industriales
actuarse sobre uno de los dos pulsadores. Cuando la intensidad baje a un valor por debajo del ajuste, se deja de alimentar la bobina K4A, se vuelve alimentar K3Q y se cortocircuitan las resistencias de arranque. Con esto el motor a su nivel de tensin normal. Las resistencias no se vuelven a incorporar hasta que no se produzca otro arranque o inversin de giro.
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
11
Automatizacin de Procesos Industriales
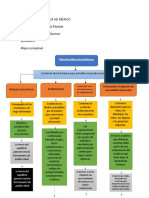
AUTMATAS NEUMATICOS Los circuitos neumticos, son circuitos que funcionan mediante el flujo de aire, a travs de sus circuitos, a una determinada presin. VLVULAS NEUMATICAS Las vlvulas son concebidas para controlar el arranque, parada, direccin y sentido del flujo del aire en el circuito neumtico. Con ellas se pueden gobernar de forma directa o indirecta, las de mando o pilotaje, actuadores del tipo de cilindros, motores neumticos, o pinzas. Las vlvulas distribuidoras y de mando pueden ser de dos o ms posiciones, y con dos o ms vas. Las posiciones se representan mediante cuadros. Las vas son las entradas y salidas que se unen al cuadro (posicin) activa. Las vas como conexiones al exterior, pueden se del tipo general (una simple lnea), a una toma de presin (circulo con punto interior), o escape a la atmsfera (triangulo). Cada uno de los cuadros, es decir posiciones, produce una determinada funcin. Se representan en reposo, pero ante la accin de una fuerza exterior, como fuerza manual, neumtica, electromagntica, etc, las casillas se desplazan sobre las tomas exteriores y ocupan una u otra posicin. Las vlvulas pueden clasificarse segn su forma constructiva, funcin que cumplen o tipo de mando: 1. Forma constructiva: Vlvula de asiento. Vlvula de corredera.
2. Funcin que cumplen: Distribuidoras de flujo. De mando. Captadoras de seal o posicin.
3. Tipo de mando: Manual. Mecnico. Neumtico. Elctrico.
TIPOS DE ACCIONAMIENTO En cuanto al accionamiento, como ya se ha referido, tenemos: Accionamiento manual. Estas requieren la accin voluntaria de un operador.
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
12
Automatizacin de Procesos Industriales
Accionamiento mecnico. Son activadas por un mecanismo o vstago. Accionamiento neumtico. Consiste en un pilotaje que permite el accionamiento de una vlvula a distancia aprovechando la fuerza que produce el aire a presin. Accionamiento elctrico. Se utiliza una seal elctrica, que mediante un dispositivo electromagntico acciona la vlvula.
TIPOS DE MANDOS En lo que al mando se refiere debemos de diferenciar entre los circuitos de mando directo, los circuitos de mando indirecto, y los circuitos de mando condicional o simultaneo. Mando directo: la accin que el operario realiza sobre las vlvulas de mando incide directamente sobre los actuadores que gobiernan los elementos de fuerza. No es necesario la intervencin de vlvulas distribuidoras.
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
13
Automatizacin de Procesos Industriales
Mando indirecto: En este caso las vlvulas de mando, que manipula el operario, gobiernan a unas vlvulas distribuidoras que son las que se comunican con los actuadores principales. En algunos casos no conviene o no puede gobernarse directamente un cilindro, por necesidad de un gran caudal, estar muy alejado, etc.
Mando condicional (o simultaneo): Cuando un cilindro ha de responder a la accin simultanea de dos pulsadores. Se utilizad en numerosas ocasiones para garantizar la seguridad de los operarios.
TEMPORIZADORES Tambin debemos de conocer las vlvulas que permiten la temporizacin neumtica. Son vlvulas complejas compuestas por un estrangulamiento graduable, con lo que se puede ajustar la temporizacin, una cmara de acumulacin y un distribuidor pilotado. En el ejemplo pueden ver una vlvula temporizada de tres vas y dos posiciones y normalmente abierto. Esto quiere decir que si se alimenta su va de presin y no se alimenta su orificio de pilotaje, a la salida habr aire a presin, como cualquier vlvula normalmente abierta. Si se alimenta el orificio de pilotaje, por ser temporizador, mantendr la posicin inicial durante un tiempo ajustable. Pasando este tiempo cambiar la posicin. En esta la va de presin esta bloqueada y la va de trabajo est conectada al escape, lo que supone que a la salida del temporizador se tendr un nivel 0 de presin. Internamente consta de un regulador de caudal unidireccional, de un deposito de mayor o menor capacidad y de una vlvula monoestable (en una de las dos posiciones es estable en el tiempo).
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
14
Automatizacin de Procesos Industriales
Si por el orificio de alimentacin llega aire a presin, este ir llenando el depsito a una velocidad tanto menor cuanto mayor sea el grado de estrangulamiento el regulador. Una vez que el aire del interior alcanza una presin suficiente para vencer la accin del resorte de la vlvula, esta ser pilotada y cambiar de posicin.
De este modo la graduacin del estrangulamiento permite ajustar la temporizacin (mayor estrangulamiento, mayor temporizacin). El antiretorno del regulador sirve para vaciar el depsito si se comunica el orificio de pilotaje con la atmsfera y permitir, de este modo, un estado inicial de vaco para la siguiente temporizacin. VLVULAS DE RETENCION Otro tipo de vlvulas interesantes son las vlvulas de retencin (o antiretorno), las cuales permiten el paso del fluido del aire en una nica direccin. VLVULAS DE SIMULTANEIDAD A la salida existir aire a presin slo si a ambas entradas llega aire a presin. Por lo tanto realiza la funcin lgica AND entre las entradas.
VLVULAS SELECTORAS DE CIRCUITO Si en alguna de sus entradas hay aire a presin, comunicar dicho aire hacia la salida. Realiza, por tanto, la funcin lgica O entre sus entradas.
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
15
Automatizacin de Procesos Industriales
AUTMATAS PROGRAMABLES Los autmatas programables tienen la funcin de interactuar con el proceso, recibiendo las seales de entrada de los captadores y elementos de control y dando lugar a las salidas que sern ejecutadas por los rganos correspondientes. Estas salidas obedecer al programa introducido en el autmata. Para la realizacin del programa nos basaremos en el GRAFCET. El GRAFCET es un mtodo grfico que permite representar los automatismos secuenciales describiendo grficamente la evolucin del automatismo y los diferentes comportamientos de este. Por ello decimos que su funcin es precisar el ciclo y las condiciones de funcionamiento de la maquina automtica. A las fases se les llaman etapas. Entre dos etapas hay una transicin. A cada transicin le corresponde una receptividad, es decir la condicin que se ha de cumplir para pasar de una etapa a otra. Una transicin es valida cuando todas las etapas anteriores son activas. Una transicin es franqueable cuando es valida y se receptividad asociada se cumple. Al franquear una transicin se desactiva las etapas anteriores y se activan las etapas posteriores.
Las estructuras bsicas ms utilizadas comnmente son las siguientes: Secuencia lineal Acciones exclusivas Salto de etapas Repeticin de secuencia Acciones simultaneas
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
16
Automatizacin de Procesos Industriales
1 SECUENCIA LINEAL El GRAFCET evoluciona en forma consecutiva sin ningn tipo de seleccin.
2 ACCIONES EXCLUSIVAS Dependiendo de que receptividad se cumpla, el GRAFCET evoluciona hacia una secuencia de etapas u otra; tambin recibe el nombre de seleccin de secuencia. Las acciones exclusivas comienzan con transiciones y terminan con transiciones.
3 SALTO DE ETAPAS Segn la receptividad o condicin que se cumpla, el GRAFCET evoluciona hacia una serie de etapas o bien hace un salto hacia delante, no activando estas etapas. Podra considerarse un caso particular de seleccin de secuencia.
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
17
Automatizacin de Procesos Industriales
4 REPETICIN DE SECUENCIA Tras realizar una secuencia de etapas, el GRAFCET se encuentra ante dos receptividades. Segn se cumpla una u otra, el GRAFCET evoluciona hacia otra serie de etapas o bien hace un salto hacia atrs, repitiendo las etapas anteriores.
5 ACCIONES SIMULTANEAS El GRAFCET evoluciona hasta la lnea doble, momento en que las siguientes etapas se activan simultneamente y sigue su evolucin independientemente; finalmente, en la siguiente lnea doble la secuencia solo evolucionar s las etapas anteriores estn todas activas. Tambin se llama paralelismo estructural. Las acciones simultaneas comienzan con etapas y terminan con etapas.
LENGUAJE DE PROGRAMACIN El autmata programable S7-300 puede ser programado en dos lenguajes: KOP: En el que se tiene segmentos con contactos y salidas. AWL: Se escribe cada una de las instrucciones.
En la trascripcin tenemos las siguientes partes: 1. Transiciones 2. Temporizadores 3. Salidas
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
18
Automatizacin de Procesos Industriales
Nos centraremos en el AWL, ya que es ms rpido de programar. U: Consulta la variable. UN: Consulta negada de la variable. O: Operacin lgica Or. S: Activa. R: Desactiva. FP: Detecta flanco positivo. FN: Detecta flanco negativo. L: Carga en ACU 1 (pasando el antiguo ACU1 a ACU2). T: Transfiere el contenido de ACU 1 a una direccin de destino. SI: Temporizador de impulso. SV: Temporizador de impulso programado. SE: Temporizador con retardo a la conexin. SA: Temporizador con retardo a la desconexin. SS: Temporizador con retardo a la conexin memorizada. ZV: Contador incremental. ZR: Contador decremental. SPB: Salto. CC: Llamada a una funcin I: (mayores, menores iguales). Compara ACCU1 con ACU2 U UN O S R FP FN L T SI SV SE SA SS ZV ZR SPB CC =I E0.1 pulsa E4.0 A8.0 ET2 M1.0 M.1.1 PEPE MW14 T2 T3 T4 T5 T6 Z1 Z2 SAL1 FC1
BLOQUES OB100 L T T SET = ET0 RESET DE LAS ENTRADAS L T DW#16#0 MW 0 DW#16#0 MW 0 AW 8
RESET DE LAS SALIDAS L T DW#16#0 AW 8
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
19
Automatizacin de Procesos Industriales
EJEMPLOS DE AUTOMATIZACIN DE PROCESOS 1 SECUENCIA LINEAL
2 ACCIONES EXCLUSIVAS
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
20
Automatizacin de Procesos Industriales
3 BUCLES
4 ACCIONES SIMULTANEAS
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
21
Automatizacin de Procesos Industriales
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
22
Automatizacin de Procesos Industriales
DECLARACIN DE SALIDAS Se rastrea por cada salida las etapas que la activa, y no al contrario. En cada una de las etapas podemos asignarle que active una salida, de la forma: U = O O O = UN = ET10 A8.0 ET3 ET6 ET11 A8.2 ET3 verde
TEMPORIZADORES Si queremos pasar de la etapa 10 a la etapa 11, cuando transcurra un tiempo de 20 segundos, en las lneas del cuerpo del programa escribiremos: U U S R ET10 T1 ET11 ET10
En conjunto de ordene referentes a temporizadores debemos de declarar el temporizador: U L SE ET10 S5T#20s T1
CONTADORES Para los contadores contador se pone a 0. Por ejemplo para un bucle de 5 decremental tenemos: U L S ET3 C#5 Z1 tmenos ZV (contador incremental), y ZR (contador decremental). El contador estar a 1 desde que se activa y la cuenta sea distinta de cero. Cuando llega a cero el
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
23
Automatizacin de Procesos Industriales
U S R U U S R U U U S R U U UN S R U = U ZR U =
ET3 ET5 ET3 ET5 Savance ET6 ET5 ET6 Sretroceso Z1 ET5 ET6 ET6 Sretroceso Z1 ET0 ET6 ET5 Kavance ET5 Z1 ET6 KRetroceso
LLAMADAS A FUNCIONES Para realizar la llamada a funciones tenemos la orden CC. Por ejemplo para llamar a la funcin FC3, una vez que lleguemos a la etapa 15: U CC S R ET15 FC3 ET16 ET15
SALTOS Para realizar saltos dentro del programa, utilizaremos SPB:
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
24
Automatizacin de Procesos Industriales
U SPB . . . . Hola:
ET41 Hola
U U S R
ET48 pulsador ET49 ET48
TRATAMIENTO DE SEALES ANALGICAS L T L >=I = A 8.0 <I = A 8.1 PEW 256 MW 4 7000
TIPOS DE PARADAS 1 PARADA A FIN DE CICLO El pulsador se podr activar en cualquier momento del ciclo, y el proceso debe continuar hasta que termine el ciclo. El proceso se reinicia con arranque. Crearemos una etapa ET20 en la que estar el GRAFCET normalmente (hay que declararla en el OB100. Al pulsar Bfindeciclo, pasaremos a otra etapa llamada ET21. Si pulsamos arranque, estando en la ET21, volveremos a la ET20. Por otro lado, en la ultima etapa de las transiciones, cuando llama para inicicar el proceso (ET1), debemos de escribir: U U UN S R ET11 T8 ET21 ET1 ET11
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
25
Automatizacin de Procesos Industriales
2 PARADA Y SITUACIN EN POSICIN SEGURA El autmata debe hacer que los mecanismos adopten una posicin segura. Se inicia con arranque. Le daremos solucin mediante una llamada a funcin. Normalmente estaremos en ET30 (declarada en OB100). Si pulsamos Bparadapossegura, pasamos a ET31. en ET31 se llama a la funcin FC1. U CC S R ET31 F1 ET32 ET31 (continuando con el proceso a posicin segura)
La funcin FC1, quedar: L T DW#16#0 MW0
3 PARADA TOTAL CON CONGELACIN Se puede pulsar en cualquier momento, desactivando todas las salidas y no permite la evolucin del GRAFCET. Se inicia con rearme. En este caso normalmente estaremos en una etapa ET40, declarada en el OB100. Si pulsamos Bcongela, pasaremos a la ET41. En esta etapa llamaremos a la funcin FC2: U U S R U CC L T ET40 Bcongela ET41 ET40 ET41 FC2 DW#16#0 AW8
Al principio del GRAFCET escribiremos: U SPB . . . Salto: U ET40 ET41 salto
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
26
Automatizacin de Procesos Industriales
U S R
Bcongela ET41 ET40
4 PARADA TOTAL CON REPOSICIN MANUAL Se pulsa en cualquier momento. Se desactivan todas las salidas. Si se pulsa rearme la maquina funcionar manual. Para funcionamiento automtico hay que pulsar arranque. En este caso desactivamos de nuevo las salidas y hacemos una secuencia lineal de los pasos restantes. EJEMPLO PARA ARRANQUE ESTRELLA TRIANGULO Se presenta la trascripcin del GRAFCET para el arranque estrella-triangulo, con una parada, ya sea por parada manual o por disparo del trmico. OB100 L T T SET = ET0 = ET10 OB1 U U S R U U S R U U( O O ) S ET11 Bparo Ftermico ET0 Bmarcha ET1 ET0 ET1 T1 ET2 ET1 ET10 DW#16#0 DW0 AW8
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
27
Automatizacin de Procesos Industriales
R U CC U S S R U L SE O O = U = U = FC1 L T SET =ET11
ET10 ET11 FC1 ET11 ET0 ET10 ET11 ET1 S5T#10s T1 ET1 ET2 K1M ET1 K3M ET2 K2M
DW#16#0 MW0
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
28
Automatizacin de Procesos Industriales
ROBOTICA Vamos a desarrollar el modulo de robtica mediante el robot SCORBOT-V. El lenguaje de programacin que utiliza es el ACL (Lenguaje de Control Avanzado). El robot tiene cinco articulaciones que proporcionan cinco grados de libertad. 1 COMANDOS DE CONTROL DE EJES MOVE: Mueve el Robot a la posicin especificada, mientras tanto ejecuta el siguiente comando. MOVED: Mueve el Robot a la posicin especificada, continuando con el prximo comando cuando el robot haya alcanzado la posicin. MOVELD: Mueve el Robot a la posicin especificada, por una trayectoria lineal, continuando con el prximo comando cuando el robot haya alcanzado la posicin. OPEN: Abre la pinza hasta el fin de su movimiento. CLOSE: Cierra la pinza. 2 COMANDOS DE CONTROL DE PROGRAMA Y TIEMPO REAL DEFP pos: Crea (define) una posicin. DIMP vec: Define un vector de n posiciones. SETP pos2=pos1: Copia el valor de la posicin pos1 a la posicin pos2. SHIFTC pos BY val coord.: Cambia el valor de una posicin, asignando un nuevo valor, en coordenadas cartesianas, al eje especificado. 3 COMANDOS DE MANIPULACIN Y DEFINICIN DE VARIABLES DEFINE: Crea (define) variables locales. 4 COMANDOS DE FLUJO DE PROGRAMA IF var1 cond var2: Comprueba la relacin condicional. ELSE: Sigue a IF y precede a ENDIF. ENDIF: Indica el fin de IF. FOR var=var1 TO var2: Comando Bucle. Ejecuta el contenido entre FOR y ENDFOR, para todos los valores de la variable. ENDFOR: Fin del bucle FOR. LABEL n: Etiqueta para el uso de saltos incondicionales por medio de GOTO. GOTO n: Ejecuta un salto incondicional hasta el LABEL indicado. GOSUB prog: Ejecuta un programa como una subrutina. 5 COMANDOS DE CONTROL I/O SET OUT [n]= estado: Fija el estado de la salida a 0 o 1. WAIT IN [n]= estado: Suspende la ejecucin hasta que se cumpla la condicin.
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
29
Automatizacin de Procesos Industriales
Para la programacin del robot en primer lugar plantearemos un diagrama de bloques (con sus lneas de flujo). Una vez especificado este se implementar en lenguaje ACL, comenzando por la declaracin de las variables y posiciones. Un aspecto importante a tener en cuenta el la relacin con otros robots o instrumentos (sensores, autmatas, etc), para ello tenemos los protocolos de comunicacin. Para ello podemos hacer que el autmata ponga una salida a 1 0 (SET OUT [1]=1), o hacer que se detenga hasta que detecte en su entrada un uno o cero (WAIT IN [3]=1). Otro dato a tener en cuenta es que los desplazamientos y giros se expresan en dcimas de milmetro y en dcimas de grado. EJEMPLOS DE CODIGO ROBOT DEFINIR VARIABLES POSICIN DEFP AC DEFP ACAUX DEFINIR VARIABLES NUMRICAS DEFINE CONT DEFINE I,J DEFINIR VECTOR DIMP CAJA[6]
MODIFICA POSICIONES STEP SHIFTC ACAUX=AC ACAUX BY Z 3000
INICIO CONTADOR SET CONT=0 MOVIMIENTO SPEED MOVED OPEN MOVELD CLOSE MOVELD MOVECD ACAUX P1 AC 100 50 ACAUX
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
30
Automatizacin de Procesos Industriales
PROTOCOLO COMUNICACIN SET OUT[1]=1 WAIT IN [1]=1 SET OUT[1]=0 CONDICIONES IF . . ELSE . . ENDIF BUCLE FOR I=1 TO 3 . . END FOR SALTOS EN EL PROGRAMA GOTO 1 . . LABEL1 LLAMADA SUBPROGRAMA GOSUB PROGRAMA
BUCLE PARA CAJA SET PRIM = CAJA FOR I = 1 TO 2 SETP PRIMAUX = PRIM FOR J = 1 TO 4 SETP CAJA [I*4-4+J] = PRIMAUX SHIFTC PRIMAUX BY X 3000 END FOR SHIFTC PRIM BY Y 2000 ENDFOR
Jos Luis Caballano Alcntara Ingeniero Organizacin Industrial
31
Das könnte Ihnen auch gefallen
- Procedimiento UttDokument6 SeitenProcedimiento UttCarolina PBNoch keine Bewertungen
- Alarcon Guzman Actividad 2Dokument2 SeitenAlarcon Guzman Actividad 2Nolo EstevesNoch keine Bewertungen
- Descargar Examen Ingreso Guardia Civil 2A y 2B 24-09-2022Dokument36 SeitenDescargar Examen Ingreso Guardia Civil 2A y 2B 24-09-2022rafa En HdeèNoch keine Bewertungen
- Territorialidad Tzutujil. Frente A La Expancion de La Caña de AzucarDokument145 SeitenTerritorialidad Tzutujil. Frente A La Expancion de La Caña de AzucarajtikonelNoch keine Bewertungen
- BasileaDokument3 SeitenBasileaDayanna HernandezNoch keine Bewertungen
- Ley de CompaniasDokument95 SeitenLey de CompaniasjosanzepNoch keine Bewertungen
- Cómo Regularizar A Una Empleada Doméstica - Mi Presupuesto FamiliarDokument14 SeitenCómo Regularizar A Una Empleada Doméstica - Mi Presupuesto FamiliarDiego ArandaNoch keine Bewertungen
- Como Construir Un Diagrama de Ishikawa y Pareto en Mantenimiento IndustrialDokument5 SeitenComo Construir Un Diagrama de Ishikawa y Pareto en Mantenimiento IndustrialolntuNoch keine Bewertungen
- Plan Estratégico para La Mejora de La Gestión EscolarDokument50 SeitenPlan Estratégico para La Mejora de La Gestión Escolarerika100% (1)
- Vilcabamba Water Sergio 11Dokument16 SeitenVilcabamba Water Sergio 11Jon AltamiranoNoch keine Bewertungen
- Manual de Funciones AbonosDokument10 SeitenManual de Funciones Abonosdanny arenasNoch keine Bewertungen
- SVGH-RH-F-10 Acta Inducción de PersonalDokument1 SeiteSVGH-RH-F-10 Acta Inducción de PersonalleidyNoch keine Bewertungen
- Energía HidráulicaDokument6 SeitenEnergía HidráulicaGladisIraolaNoch keine Bewertungen
- Informe Motor de Induccion Parte 1Dokument19 SeitenInforme Motor de Induccion Parte 1Cristian MolinaNoch keine Bewertungen
- Técnicas de Investigación BibliográficaDokument2 SeitenTécnicas de Investigación BibliográficaJuan Pablo FNoch keine Bewertungen
- Glucosa ChiDokument1 SeiteGlucosa Chijuan sanchez chiNoch keine Bewertungen
- Exposicion Nia 701Dokument7 SeitenExposicion Nia 701manuel chaconNoch keine Bewertungen
- La Educaciòn para La SaludDokument6 SeitenLa Educaciòn para La SaludGabriela Zhuño DuránNoch keine Bewertungen
- Acta de Operacion y MantenimientoDokument2 SeitenActa de Operacion y MantenimientoPaul Quisan JulNoch keine Bewertungen
- Propuesta de Reglamento Ley Que Regula Actividad de Recicladores VF 056Dokument24 SeitenPropuesta de Reglamento Ley Que Regula Actividad de Recicladores VF 056Wilber M. LivisiNoch keine Bewertungen
- Dell Program PartnerDokument17 SeitenDell Program PartnerramepieNoch keine Bewertungen
- 2021 - D. 796-2021 - Se Gravan en El Impuesto A Las Operaciones Con Criptomonedas y Monedas DigitalesDokument3 Seiten2021 - D. 796-2021 - Se Gravan en El Impuesto A Las Operaciones Con Criptomonedas y Monedas DigitalesJose GomezNoch keine Bewertungen
- Ejemplo Publicidad Diplomado Con CostoDokument2 SeitenEjemplo Publicidad Diplomado Con CostoMateo GarzonNoch keine Bewertungen
- Solucion Taller Mariela OrtizDokument13 SeitenSolucion Taller Mariela Ortizmariela ortizNoch keine Bewertungen
- SupplyDokument2 SeitenSupplyGian VelaNoch keine Bewertungen
- Carta Anulacion Declaracion Retencion IslrDokument1 SeiteCarta Anulacion Declaracion Retencion IslrYosangelNoch keine Bewertungen
- Mapa Mental Sem 3 FinalDokument1 SeiteMapa Mental Sem 3 FinalAndrea Rojas CamargoNoch keine Bewertungen
- Cotización Poliza TrecDokument4 SeitenCotización Poliza TrecACOMISA INGENIERIANoch keine Bewertungen
- Formula Chuleta de Formulas EstadisticasDokument6 SeitenFormula Chuleta de Formulas Estadisticasborrar23Noch keine Bewertungen
- ReciboDigital 19042022Dokument2 SeitenReciboDigital 19042022Glenn Alexander Perez CarbajalNoch keine Bewertungen