Das könnte Ihnen auch gefallen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- 110 Waveform Generator Projects for the Home ConstructorVon Everand110 Waveform Generator Projects for the Home ConstructorBewertung: 4 von 5 Sternen4/5 (1)
- Battery Design GuideDokument11 SeitenBattery Design Guidekranti06Noch keine Bewertungen
- UPS Sizing Calculation - EmersonDokument5 SeitenUPS Sizing Calculation - Emersonjugal8252Noch keine Bewertungen
- Semi-Detailed Lesson Plan in Tvl-Ict Computer Systems Servicing Ncii I. ObjectivesDokument6 SeitenSemi-Detailed Lesson Plan in Tvl-Ict Computer Systems Servicing Ncii I. ObjectivesJaikah Mae Ludovice HerreraNoch keine Bewertungen
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsVon EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNoch keine Bewertungen
- Playstation (Console) : Manufacturer Product Family Type Generation Retail Availability PlaystationDokument22 SeitenPlaystation (Console) : Manufacturer Product Family Type Generation Retail Availability Playstationro_venancioNoch keine Bewertungen
- Automation Chapter 5Dokument65 SeitenAutomation Chapter 5Owais GharaibehNoch keine Bewertungen
- Eflash: Contractual Information For Partners: Phase-OutDokument2 SeitenEflash: Contractual Information For Partners: Phase-OutMoises ReznikNoch keine Bewertungen
- The History of TelevisionDokument2 SeitenThe History of TelevisionChhayaLoveStudyNoch keine Bewertungen
- Ns16C552, Pc16552D: Pc16552D Dual Universal Asynchronous Receiver/Transmitter With FifosDokument24 SeitenNs16C552, Pc16552D: Pc16552D Dual Universal Asynchronous Receiver/Transmitter With FifosNeimar HahmeierNoch keine Bewertungen
- 128mbit SDRAM: 2M X 16bit X 4 Banks Synchronous DRAM LVTTLDokument11 Seiten128mbit SDRAM: 2M X 16bit X 4 Banks Synchronous DRAM LVTTLThiago Cristiano TavaresNoch keine Bewertungen
- Acer Aspire 7110 9410 9420 - Wistron Myall2 - Rev MpsecDokument57 SeitenAcer Aspire 7110 9410 9420 - Wistron Myall2 - Rev MpsecCezar CarvalhoNoch keine Bewertungen
- Ds92Lv16: Ds92Lv16 16-Bit Bus Lvds Serializer/Deserializer - 25 - 80 MHZDokument21 SeitenDs92Lv16: Ds92Lv16 16-Bit Bus Lvds Serializer/Deserializer - 25 - 80 MHZlur46Noch keine Bewertungen
- IC4017Dokument11 SeitenIC4017Nikhil BhatiNoch keine Bewertungen
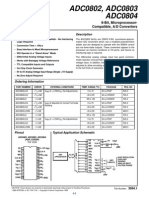
- ADC0802, ADC0803 ADC0804: Features DescriptionDokument17 SeitenADC0802, ADC0803 ADC0804: Features DescriptionSuryananda PadmadinataNoch keine Bewertungen
- Adc0804 PDFDokument16 SeitenAdc0804 PDFbudicw0% (1)
- CD4553 Datasheet OKDokument13 SeitenCD4553 Datasheet OKCong ThoNoch keine Bewertungen
- ADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesDokument17 SeitenADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesJorge Luis Castillo GuarachiNoch keine Bewertungen
- ADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesDokument18 SeitenADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesMarco MenezesNoch keine Bewertungen
- ¡ Semiconductor: MSM80C88A-10RS/GS/JSDokument37 Seiten¡ Semiconductor: MSM80C88A-10RS/GS/JSZarate BismkNoch keine Bewertungen
- High Speed Can Bus Transceiver: DescriptionDokument9 SeitenHigh Speed Can Bus Transceiver: Descriptionsweety987Noch keine Bewertungen
- I C, 32-Bit, Binary Counter Clock With 64-Bit ID: General Description FeaturesDokument12 SeitenI C, 32-Bit, Binary Counter Clock With 64-Bit ID: General Description FeaturesNur AzizahNoch keine Bewertungen
- Pic 16 F 628Dokument20 SeitenPic 16 F 628Merényi Oszkár100% (1)
- 74LS175Dokument3 Seiten74LS175Yesenia RojoNoch keine Bewertungen
- IN44780U Dot Matrix Liquid Crystal Display Controller & DriverDokument10 SeitenIN44780U Dot Matrix Liquid Crystal Display Controller & DriverSilviu AdgjNoch keine Bewertungen
- 74LS93Dokument11 Seiten74LS93cocoxo13marNoch keine Bewertungen
- U34 - Dram Hy57v641620ftp7Dokument13 SeitenU34 - Dram Hy57v641620ftp7qwertyuNoch keine Bewertungen
- Ha 13563Dokument18 SeitenHa 13563Danh ProNoch keine Bewertungen
- Adv 7202Dokument28 SeitenAdv 7202Atif IlyasNoch keine Bewertungen
- LC7930N, 7930NW CMOS LCD drivers overview and specsDokument8 SeitenLC7930N, 7930NW CMOS LCD drivers overview and specsWilson JhNoch keine Bewertungen
- SG3525A Pulse Width Modulator Control Circuit: 1% and The ErrorDokument10 SeitenSG3525A Pulse Width Modulator Control Circuit: 1% and The ErrorJayesh SuryavanshiNoch keine Bewertungen
- A4982 DatasheetDokument20 SeitenA4982 DatasheetmedhyalNoch keine Bewertungen
- 16Mb H-Die SDRAM Specification: Revision 1.5 August 2004Dokument12 Seiten16Mb H-Die SDRAM Specification: Revision 1.5 August 2004AleksandarPetrovicNoch keine Bewertungen
- CD4047Dokument9 SeitenCD4047Haryadi VjNoch keine Bewertungen
- Features Description: LTC2368-16 16-Bit, 1Msps, Pseudo-Differential Unipolar SAR ADC With 94.7dB SNRDokument24 SeitenFeatures Description: LTC2368-16 16-Bit, 1Msps, Pseudo-Differential Unipolar SAR ADC With 94.7dB SNRrotenolabsNoch keine Bewertungen
- DTMF Receiver HM 9270C/DDokument10 SeitenDTMF Receiver HM 9270C/DCarlos Javier Solano GuzmánNoch keine Bewertungen
- 89v51Rd2 Microcontroller: Appendix 1Dokument10 Seiten89v51Rd2 Microcontroller: Appendix 1AmrutanarkhedeNoch keine Bewertungen
- Linear Technology LTC3728EG28400Dokument37 SeitenLinear Technology LTC3728EG28400Rickz2k8Noch keine Bewertungen
- MemoriaDokument7 SeitenMemoriaEduardo TaglialavoreNoch keine Bewertungen
- TCM3105DWL, TCM3105JE, TCM3105JL TCM3105NE, TCM3105NL FSK ModemDokument12 SeitenTCM3105DWL, TCM3105JE, TCM3105JL TCM3105NE, TCM3105NL FSK ModemSetya AgusNoch keine Bewertungen
- Ca3306 (A, C)Dokument17 SeitenCa3306 (A, C)notaden1849Noch keine Bewertungen
- 64k SRAM with 85/100ns Access and Low Power ConsumptionDokument16 Seiten64k SRAM with 85/100ns Access and Low Power ConsumptionNguyen Hai Tran SonNoch keine Bewertungen
- 7214Dokument12 Seiten7214Dan EsentherNoch keine Bewertungen
- 74C373Dokument11 Seiten74C373Juan Orlando MontesNoch keine Bewertungen
- MC6821PDokument10 SeitenMC6821Pbobyof91Noch keine Bewertungen
- CD22100 - DataSheetDokument10 SeitenCD22100 - DataSheetHao ChungNoch keine Bewertungen
- CB900K e 0203Dokument73 SeitenCB900K e 0203Vuong NguyenNoch keine Bewertungen
- LK315T3LA57Dokument24 SeitenLK315T3LA57Repararelcd Lcd0% (1)
- Agm 0070WTDokument27 SeitenAgm 0070WTbrandt_br7991Noch keine Bewertungen
- TLC 5540Dokument18 SeitenTLC 5540EdgarJCNoch keine Bewertungen
- La 72730Dokument8 SeitenLa 72730KHALILSAVNoch keine Bewertungen
- Starchips Starchips Starchips Starchips: TechnologyDokument15 SeitenStarchips Starchips Starchips Starchips: TechnologyXFact0r100% (1)
- Datasheet L6229Dokument25 SeitenDatasheet L6229Raul Sense MejiaNoch keine Bewertungen
- HCTL 2017Dokument12 SeitenHCTL 2017ivancho1070Noch keine Bewertungen
- THC63LVDM83R/THC63LVDM63R: General Description FeaturesDokument13 SeitenTHC63LVDM83R/THC63LVDM63R: General Description Featureshenry96sNoch keine Bewertungen
- Hanbit Hmn328D: Non-Volatile Sram Module 256kbit (32K X 8-Bit), 28pin Dip, 5V Part No. Hmn328DDokument9 SeitenHanbit Hmn328D: Non-Volatile Sram Module 256kbit (32K X 8-Bit), 28pin Dip, 5V Part No. Hmn328DDeepa DevarajNoch keine Bewertungen
- High Voltage Resonant Controller: DescriptionDokument17 SeitenHigh Voltage Resonant Controller: DescriptionJesus SilvaNoch keine Bewertungen
- NCP1378 PWM Current - Mode Controller For Free - Running Quasi - Resonant OperationDokument15 SeitenNCP1378 PWM Current - Mode Controller For Free - Running Quasi - Resonant OperationBoKi PoKiNoch keine Bewertungen
- LV23002MDokument13 SeitenLV23002Mmister_wNoch keine Bewertungen
- CD4047BC Low Power Monostable/Astable Multivibrator: General DescriptionDokument10 SeitenCD4047BC Low Power Monostable/Astable Multivibrator: General DescriptionWillianNoch keine Bewertungen
- Integrated Circuit Systems, IncDokument11 SeitenIntegrated Circuit Systems, Incroger marqNoch keine Bewertungen
- 14-Channel Programmable Switchable I C TFT-LCD Reference Voltage Generator With Integrated 4-Channel Static Gamma Drivers FeaturesDokument10 Seiten14-Channel Programmable Switchable I C TFT-LCD Reference Voltage Generator With Integrated 4-Channel Static Gamma Drivers FeaturesRepararelcd LcdNoch keine Bewertungen
- LC Mos, High Speed 1-, 4-& 8-Channel 10-Bit Adcs Ad7776/Ad7777/Ad7778Dokument12 SeitenLC Mos, High Speed 1-, 4-& 8-Channel 10-Bit Adcs Ad7776/Ad7777/Ad7778tarpinoNoch keine Bewertungen
- Applied Physics GS-122: Atif M.KhokharDokument30 SeitenApplied Physics GS-122: Atif M.Khokharapi-19505286Noch keine Bewertungen
- Application Guide For Op AmpDokument16 SeitenApplication Guide For Op AmpPararth ShahNoch keine Bewertungen
- Current Sense Circuit CollectionDokument5 SeitenCurrent Sense Circuit CollectionDalla Torre CustomsNoch keine Bewertungen
- Connecting Batteries and Chargers in Series and ParallelDokument10 SeitenConnecting Batteries and Chargers in Series and Parallelbaber_wahabNoch keine Bewertungen
- Stepper Motor Controller Guide Using L298 and L297 DriversDokument6 SeitenStepper Motor Controller Guide Using L298 and L297 DriversmoannaNoch keine Bewertungen
- Dspace 1103Dokument8 SeitenDspace 1103TimoMarxNoch keine Bewertungen
- 1tne968902r1101 Ai561s500 Analog Input Mod 4ai U IDokument2 Seiten1tne968902r1101 Ai561s500 Analog Input Mod 4ai U IMartinCastilloSancheNoch keine Bewertungen
- FCC Test Report SummaryDokument21 SeitenFCC Test Report Summarysr vdeNoch keine Bewertungen
- Proposal of Robot ThesisDokument5 SeitenProposal of Robot ThesisHus Forth CorrentyNoch keine Bewertungen
- Cha 4 PS IDokument23 SeitenCha 4 PS ITsega Solomon KidaneNoch keine Bewertungen
- Dynamic Voltage and Frequency Scaling (DVFS) Scheme For Multi-Domains Power ManagementDokument4 SeitenDynamic Voltage and Frequency Scaling (DVFS) Scheme For Multi-Domains Power ManagementmonaNoch keine Bewertungen
- Tactical Tight-Buffered Cable: 12 F, Bend-Improved Single-Mode (OS2)Dokument3 SeitenTactical Tight-Buffered Cable: 12 F, Bend-Improved Single-Mode (OS2)Nadine BarghothiNoch keine Bewertungen
- Modern Communication Technologies:: ECE F418 / EEE F418Dokument19 SeitenModern Communication Technologies:: ECE F418 / EEE F418Jeswin EldhoNoch keine Bewertungen
- MELNICENKO2 Patent WO2007035127A1 en Inventor AndreiDokument15 SeitenMELNICENKO2 Patent WO2007035127A1 en Inventor AndreiMihai DanielNoch keine Bewertungen
- Vibrating Wire Indicator: Model Edi-51VDokument2 SeitenVibrating Wire Indicator: Model Edi-51Vdox4printNoch keine Bewertungen
- Eaget M880-User Manual v1.0.3Dokument44 SeitenEaget M880-User Manual v1.0.3NewNoch keine Bewertungen
- Triax Main Catalogue 2013 - EN - Page 001-372 - Main Catalogue - All PDFDokument387 SeitenTriax Main Catalogue 2013 - EN - Page 001-372 - Main Catalogue - All PDFPRaoNoch keine Bewertungen
- Manual Cordex 48-3.6KWDokument64 SeitenManual Cordex 48-3.6KWPabloSanabriaNoch keine Bewertungen
- Ai-Lcd104ha 530134Dokument3 SeitenAi-Lcd104ha 530134Alex AbadNoch keine Bewertungen
- IrisGT DA TechRefDokument202 SeitenIrisGT DA TechRefwrwerNoch keine Bewertungen
- RF 95 WH LR sw915 PDFDokument2 SeitenRF 95 WH LR sw915 PDFasepNoch keine Bewertungen
- NetworkingDokument38 SeitenNetworkingSandhuSukhamNoch keine Bewertungen
- 6KW To 10KW: Solis 4G Single Phase InverterDokument2 Seiten6KW To 10KW: Solis 4G Single Phase InverterAna FloresNoch keine Bewertungen
- Internet ResearchDokument2 SeitenInternet ResearchAnthony CabonceNoch keine Bewertungen
- Nemo OutdoorDokument30 SeitenNemo OutdoorhoabichcaNoch keine Bewertungen
- Manual de Board ASrock P55 DeluxeDokument75 SeitenManual de Board ASrock P55 Deluxeanon_530716820Noch keine Bewertungen
- IEEE 802 Network Engineering by Obedience Munashe KuguyoDokument9 SeitenIEEE 802 Network Engineering by Obedience Munashe KuguyoObedience Munashe Kuguyo100% (15)
- Mps-Vx Series Hybrid Solar Inverter Product Data SheetDokument1 SeiteMps-Vx Series Hybrid Solar Inverter Product Data SheetSoos JozsefNoch keine Bewertungen