Das könnte Ihnen auch gefallen
- Power Problems and UPS SolutionsDokument2 SeitenPower Problems and UPS Solutionsdrastir_777100% (1)
- Analog Engineer Cookbook Adc PDFDokument113 SeitenAnalog Engineer Cookbook Adc PDFrumralkarNoch keine Bewertungen
- OscillatorsDokument16 SeitenOscillatorsAbbas Bagherifar100% (7)
- Angle Modulation All 0Dokument64 SeitenAngle Modulation All 0Yanyan100% (1)
- Module 3 Test - Revisión Del IntentoDokument5 SeitenModule 3 Test - Revisión Del Intentocaren rodriguezNoch keine Bewertungen
- Communication Channel ModulationDokument27 SeitenCommunication Channel ModulationMd. Fasih Al ZaidNoch keine Bewertungen
- FM Modulation Concepts ExplainedDokument46 SeitenFM Modulation Concepts ExplainedMompati Letsweletse100% (1)
- Angle Modulation Engineering FundamentalsDokument34 SeitenAngle Modulation Engineering FundamentalsJamille Villarosa100% (1)
- Fusion of Neural Networks Fuzzy Systems and Genetic Algorithms - Industrial ApplicationsDokument297 SeitenFusion of Neural Networks Fuzzy Systems and Genetic Algorithms - Industrial ApplicationsLee LikaNoch keine Bewertungen
- GSM Handover Sharing Sharing GuysDokument50 SeitenGSM Handover Sharing Sharing GuysAnonymous ofwB20r0sNoch keine Bewertungen
- Chapter 4 Frequency ModulationDokument88 SeitenChapter 4 Frequency ModulationtestNoch keine Bewertungen
- FM ExercisesDokument5 SeitenFM ExercisesanililhanNoch keine Bewertungen
- ELE 3203 - LO2 - Part2Dokument39 SeitenELE 3203 - LO2 - Part2ashwaq alkhoori100% (1)
- Communication SystemsDokument35 SeitenCommunication SystemsSudhamsh Maddala100% (1)
- Angle Modulation NotesDokument88 SeitenAngle Modulation Notesareebarajpoot0453879100% (1)
- c (t) =100 cos2 π f t .The modulation index is 6Dokument9 Seitenc (t) =100 cos2 π f t .The modulation index is 6Nafeesa SalehNoch keine Bewertungen
- Modulation Techniques and DemodulationDokument59 SeitenModulation Techniques and DemodulationMahmoud ElbaroudyNoch keine Bewertungen
- Angle Modulation Tutorial 1Dokument23 SeitenAngle Modulation Tutorial 1Haider Al RikabiNoch keine Bewertungen
- FMDokument76 SeitenFMNicole Guzman100% (1)
- Angle Modulation - Frequency Modulation: φ + t ω V = t vDokument45 SeitenAngle Modulation - Frequency Modulation: φ + t ω V = t vjawaidaligNoch keine Bewertungen
- Generation of FMDokument24 SeitenGeneration of FMHarsh UpadhayayNoch keine Bewertungen
- HW 3Dokument3 SeitenHW 3Zero ChengNoch keine Bewertungen
- Chapter 5Dokument23 SeitenChapter 5Anil RaiNoch keine Bewertungen
- L4Dokument44 SeitenL4Doms100% (2)
- Reference: Communication Systems-Simon Haykin (2001)Dokument33 SeitenReference: Communication Systems-Simon Haykin (2001)Mariella Dela CruzNoch keine Bewertungen
- ) 2 Sin ) 2 Sin (Sin (1) ) 2 Sin (Cos (: T F T F T FDokument37 Seiten) 2 Sin ) 2 Sin (Sin (1) ) 2 Sin (Cos (: T F T F T FV DhinakaranNoch keine Bewertungen
- Mar 8 THDokument4 SeitenMar 8 THEce SudhagarNoch keine Bewertungen
- Angle ModulationDokument12 SeitenAngle ModulationMompati LetsweletseNoch keine Bewertungen
- PCS LabDokument8 SeitenPCS LabSaadat KhanNoch keine Bewertungen
- 6 MMMMDokument44 Seiten6 MMMMHusamHaskoNoch keine Bewertungen
- Frequency Modulation & DemodulationDokument11 SeitenFrequency Modulation & DemodulationALINoch keine Bewertungen
- Angle ModulationDokument52 SeitenAngle ModulationkshitijNoch keine Bewertungen
- Analog Communication Systems IDokument64 SeitenAnalog Communication Systems Itadepeace23Noch keine Bewertungen
- Experiment 5: Frequency Modulation: T) Is Varied Proportionally ToDokument6 SeitenExperiment 5: Frequency Modulation: T) Is Varied Proportionally ToRashmi SamantNoch keine Bewertungen
- JYOTHISHMATHI INSTITUTE OF TECHNOLOGY & SCIENCE PPT ON FREQUENCY MODULATIONDokument34 SeitenJYOTHISHMATHI INSTITUTE OF TECHNOLOGY & SCIENCE PPT ON FREQUENCY MODULATIONDr JoelNoch keine Bewertungen
- Analog Communication Systems: Angle ModulationDokument36 SeitenAnalog Communication Systems: Angle ModulationRanz Kopacz100% (1)
- FmodulationDokument24 SeitenFmodulationNaheda ShkNoch keine Bewertungen
- Class 4 FMDokument19 SeitenClass 4 FMMr RobotNoch keine Bewertungen
- Angle ModulationDokument34 SeitenAngle ModulationSanjana PulapaNoch keine Bewertungen
- Analog Communicaion Unit-3Dokument14 SeitenAnalog Communicaion Unit-3v c sekhar gollaNoch keine Bewertungen
- HW 2Dokument3 SeitenHW 2Zero ChengNoch keine Bewertungen
- Tushar Kant SC21B125 L24 ScribeDokument5 SeitenTushar Kant SC21B125 L24 ScribeUtkarsh UtsavNoch keine Bewertungen
- Angle Modulation FundamentalsDokument52 SeitenAngle Modulation FundamentalsZafar KhanNoch keine Bewertungen
- Quiz 0429to0505 SolutionDokument4 SeitenQuiz 0429to0505 SolutionDr-Eng Imad A. ShaheenNoch keine Bewertungen
- Dasistel - Frequency ModulationDokument49 SeitenDasistel - Frequency ModulationtopikNoch keine Bewertungen
- Problems From Old Tests - IIDokument6 SeitenProblems From Old Tests - IIa2901572Noch keine Bewertungen
- Exp6 (Study of Frequency Demodulation.)Dokument5 SeitenExp6 (Study of Frequency Demodulation.)TA TiusNoch keine Bewertungen
- 390gat - 23 Chapter 6Dokument25 Seiten390gat - 23 Chapter 6Avinash ChauhanNoch keine Bewertungen
- FM Modulation SpectrumDokument13 SeitenFM Modulation SpectrumUrmatan MarvinNoch keine Bewertungen
- Angle Modulation GuideDokument54 SeitenAngle Modulation GuideJan Nicholas TeorimaNoch keine Bewertungen
- s (t) =A t +2 π k m (t) dt)Dokument2 Seitens (t) =A t +2 π k m (t) dt)Gopolang Jerome TaeyeleNoch keine Bewertungen
- HW3 Soru5 6Dokument5 SeitenHW3 Soru5 6Rıdvan BalamurNoch keine Bewertungen
- Narrow-Band Frequency Modulation: Lecture #16, May 3, 2011Dokument21 SeitenNarrow-Band Frequency Modulation: Lecture #16, May 3, 2011deepam0187Noch keine Bewertungen
- Angle ModulationDokument19 SeitenAngle Modulationkibrom atsbhaNoch keine Bewertungen
- Assignment 3: Communication Theory - 1 (EC5.203 - Spring 2021) February 7, 2021Dokument2 SeitenAssignment 3: Communication Theory - 1 (EC5.203 - Spring 2021) February 7, 2021Aravind NarayananNoch keine Bewertungen
- 3 Frequency Modulation: High Amplitude High FrequencyDokument25 Seiten3 Frequency Modulation: High Amplitude High Frequencyram_786Noch keine Bewertungen
- ECE 3202 ch2Dokument34 SeitenECE 3202 ch2fikaduNoch keine Bewertungen
- Module 4 - Angle ModulationDokument26 SeitenModule 4 - Angle ModulationKala Praveen BagadiNoch keine Bewertungen
- Frequency Modulation Term 3Dokument37 SeitenFrequency Modulation Term 3Shamim Ahmed Roney100% (1)
- Analog Modulation: Part Ii: Angle ModulationDokument76 SeitenAnalog Modulation: Part Ii: Angle ModulationkNoch keine Bewertungen
- Angel ModulationDokument8 SeitenAngel ModulationRi YaNoch keine Bewertungen
- Phase and Frequency Modulation Explained: Key Differences and RepresentationsDokument12 SeitenPhase and Frequency Modulation Explained: Key Differences and RepresentationsMark manuelNoch keine Bewertungen
- Continuous Wave Modulation: Baseband Signal Message Modulated WaveformDokument18 SeitenContinuous Wave Modulation: Baseband Signal Message Modulated WaveformMnshNoch keine Bewertungen
- 2k19ec209 CSF3 AllDokument27 Seiten2k19ec209 CSF3 AlldeepuNoch keine Bewertungen
- Hyrdoacoustic Ocean Exploration: Theories and Experimental ApplicationVon EverandHyrdoacoustic Ocean Exploration: Theories and Experimental ApplicationNoch keine Bewertungen
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsVon EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNoch keine Bewertungen
- MATLAB-Applications of FuzztlogicDokument12 SeitenMATLAB-Applications of FuzztlogicAbbas BagherifarNoch keine Bewertungen
- Ex CodeDokument1 SeiteEx CodeAbbas BagherifarNoch keine Bewertungen
- Low-Noise Local Oscillator Design Techniques Using A DLL-Based Frequency Multiplier For Wireless ApplicationsDokument190 SeitenLow-Noise Local Oscillator Design Techniques Using A DLL-Based Frequency Multiplier For Wireless ApplicationsAbbas Bagherifar100% (6)
- Oscillator Basics and Low-Noise Techniques For Microwave Oscillators and VCOsDokument33 SeitenOscillator Basics and Low-Noise Techniques For Microwave Oscillators and VCOsAbbas Bagherifar90% (10)
- A Simple Analytic Method For Transistor Oscillator DesignDokument5 SeitenA Simple Analytic Method For Transistor Oscillator DesignAbbas Bagherifar100% (2)
- Oscillator Design Techniques Allow High Frequency Applications of Inverted Mesa ResonatorsDokument8 SeitenOscillator Design Techniques Allow High Frequency Applications of Inverted Mesa ResonatorsAbbas Bagherifar100% (4)
- PoE Voice Transmission Reference Design Kit User's GuideDokument22 SeitenPoE Voice Transmission Reference Design Kit User's GuideAbbas Bagherifar100% (1)
- PCS 1P (BRCH)Dokument8 SeitenPCS 1P (BRCH)Abbas Bagherifar100% (1)
- Integrating USB Into ProductsDokument17 SeitenIntegrating USB Into ProductsAbbas Bagherifar100% (2)
- CMOS Analogue Switches - Structure and SpecificationsDokument10 SeitenCMOS Analogue Switches - Structure and SpecificationsAbbas Bagherifar100% (1)
- "How To Design RF Circuits" - OscillatorsDokument7 Seiten"How To Design RF Circuits" - OscillatorsAbbas Bagherifar100% (8)
- LCD Dc/Ac Inverter Specification: DatasheetDokument8 SeitenLCD Dc/Ac Inverter Specification: Datasheetmohamad100% (1)
- Ttester enDokument125 SeitenTtester enDiego García MedinaNoch keine Bewertungen
- SIEPC80000045C SigmaV User Manual Design Maintenance Rotational MotorDokument402 SeitenSIEPC80000045C SigmaV User Manual Design Maintenance Rotational MotorNguyễn Hữu Tuân100% (1)
- Mobile NVR Series Users Manual V1 - 0 - 1 PDFDokument184 SeitenMobile NVR Series Users Manual V1 - 0 - 1 PDFNguyễn NinhNoch keine Bewertungen
- MC9500K User Manual From Barcode Datalink 11850101aDokument258 SeitenMC9500K User Manual From Barcode Datalink 11850101amariusz87Noch keine Bewertungen
- Rm0433 Reference Manual: Stm32H742, Stm32H743/753 and Stm32H750 Value Line Advanced Arm - Based 32-Bit McusDokument3.353 SeitenRm0433 Reference Manual: Stm32H742, Stm32H743/753 and Stm32H750 Value Line Advanced Arm - Based 32-Bit McusAndres GonzalezNoch keine Bewertungen
- User Manual SmartElex 15S DC Motor Driver 15A 30A PeakDokument14 SeitenUser Manual SmartElex 15S DC Motor Driver 15A 30A PeakRakesh KurhadeNoch keine Bewertungen
- Ms 1485 Rev0b VinafixDokument53 SeitenMs 1485 Rev0b VinafixCarlos Alfredo Duran ValerNoch keine Bewertungen
- MSP430 GPIO and Watchdog Timer Lab/TITLEDokument13 SeitenMSP430 GPIO and Watchdog Timer Lab/TITLEsreekanth2728Noch keine Bewertungen
- EDX WP Int MC Plan Using EDX SignalPro PDFDokument7 SeitenEDX WP Int MC Plan Using EDX SignalPro PDFMustaf MohamedNoch keine Bewertungen
- Unit 3 Interfacing: InterfaceDokument21 SeitenUnit 3 Interfacing: Interfacechirag khandelwalNoch keine Bewertungen
- Jumper Cable Spec 14-16 PDFDokument3 SeitenJumper Cable Spec 14-16 PDFRAMESH KUMARNoch keine Bewertungen
- Dpa Iii Plus and Dpa Ii Plus Quick Start Guide: A. Connecting The DPADokument2 SeitenDpa Iii Plus and Dpa Ii Plus Quick Start Guide: A. Connecting The DPAJoffre Lautaro Benavides SeminarioNoch keine Bewertungen
- Batpig FaqDokument39 SeitenBatpig Faqdiop1959Noch keine Bewertungen
- схема и сервис мануал на Sony KDL-32V2500 - WAX2TDokument100 Seitenсхема и сервис мануал на Sony KDL-32V2500 - WAX2TAbdul HadiNoch keine Bewertungen
- SMS HandlingDokument23 SeitenSMS HandlinganandvkrNoch keine Bewertungen
- Rfic AsignmentDokument2 SeitenRfic AsignmentKunal KhandelwalNoch keine Bewertungen
- Teachers Guide2Dokument32 SeitenTeachers Guide2abenezer1425Noch keine Bewertungen
- Dell E157FPC Service Manual PDFDokument122 SeitenDell E157FPC Service Manual PDFOlho AladoNoch keine Bewertungen
- Cemont CITIG 1500 DC Rev.00Dokument21 SeitenCemont CITIG 1500 DC Rev.00andreiionNoch keine Bewertungen
- Mismar Dissertation 2019 PDFDokument181 SeitenMismar Dissertation 2019 PDFJamieNoch keine Bewertungen
- RFC 781Dokument2 SeitenRFC 781NickyNETNoch keine Bewertungen
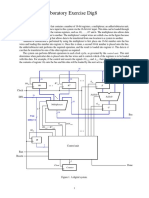
- Laboratory Exercise D: R0, - . - , R7 and A. The Multiplexer Also Allows DataDokument6 SeitenLaboratory Exercise D: R0, - . - , R7 and A. The Multiplexer Also Allows DataMunya RushambwaNoch keine Bewertungen
- CH Digital Temperature Controller Instruction ManualDokument10 SeitenCH Digital Temperature Controller Instruction Manualgurguri5691100% (1)
- ELS 04 Agustus 2023Dokument20 SeitenELS 04 Agustus 2023Yenatha SantosaNoch keine Bewertungen